

-
摘要: 多车协同驾驶能显著提高交通安全和效率, 是未来5G网联自动驾驶技术的重要应用场景之一.传统上, 多车协同驾驶的主要形式为单一车道上的无人车队列, 其队列稳定性受队列长度、通信距离及延迟的限制.本文提出一种无人车编队方法, 将单车道队列扩展为多车道护航编队.针对不同场景下的需求设计多车道编队调整策略, 结合基于图的分布式控制, 完成任意预定义的编队结构; 同时, 利用势场法对行车环境建立势场模型, 实现无人车的避障轨迹规划, 提高编队的避障能力; 最后, 结合纵横向控制器, 实现无人车多车道护航编队控制.仿真实验表明, 本文提出的无人车多车道护航编队方法, 能适应不同交通场景, 如道路变化、障碍车运动等, 完成自动变换编队结构, 实现安全、高效通行.Abstract: Multi-vehicle cooperative driving can significantly improve traffic safety and efficiency, and is one of the important application scenarios for the automatic driving technologies using the 5G network. Traditionally, multi-vehicle cooperative driving is mainly in the form of a single lane vehicle platoon. And the string stability of a vehicle platoon is limited by the platoon length, communication distance and delay. The unmanned vehicle formation method presented in this paper expands the single lane platoon into a multi-lane convoy. Specifically, a multi-lane formation adjustment strategy is designed for the requirements in different scenarios, and any pre-defined formation structure can be completed through the graph-based distributed control. Meanwhile, the potential field models of the driving environment are established by the potential field method for realizing the local trajectory planning of the unmanned vehicle, and the obstacle avoidance capability of the formation is enhanced. Finally, combined with the lateral and longitudinal controllers, the multi-lane convoy formation control of the unmanned vehicle is implemented. The simulation results show that the multi-lane convoy of unmanned vehicles can adapt different traffic conditions with various road environments and obstacles, and can autonomously transform the formation structure to pass the experimental segments safely and efficiently.
-
Key words:
- Multi-lane convoys /
- graph method /
- potential field /
- trajectory planning /
- unmanned vehicles
-
多车协同驾驶能够有效地提高交通安全性和效率并降低油耗[1-3].目前多车协同驾驶主要是聚焦于多辆无人车在单一车道前后排成一列的实现方式, 当无人车数量增加, 队列变长时, 编队可能出现串不稳定(String unstability)问题[4-5].同时, 由于受到通讯距离和延迟的限制, 单车道队列随着车辆的增加, 通信距离变长, 组网后通信延迟较大.而多车道编队并不局限于单一车道, 车辆分布于多个车道, 编队容量更大, 编队长度更短, 通信距离能够得到缩短.
目前, 已有学者对无人车的多车道编队自动驾驶进行相关研究. Kato等[6]提出了多车道编队的概念, 并用于提高编队的安全性.但方法中编队车辆数目固定, 而且头车作为唯一领导者, 容错性较低. Gowal等[7]基于图提出了一种保持预定编队的车辆控制方法, 并进一步提出了另一种控制方法[8]使得具有局部定位能力的车辆在保持预定义位置的同时跟随领导者, 能够完成不同编队形态的控制, 但缺乏对车辆脱离和加入的考虑, 没有考虑动态障碍物和道路约束. Marjovi等[9]提出了一种多车道高速公路车辆编队方法, 是基于图的分布式控制方法的扩展.车辆能够加入与脱离编队, 并适应编队内的车辆变道和避障的动态变化. Qian等[10]提出了一种分层模型预测控制方法, 期望的编队形态被建模为沿道路中心线曲线坐标系的虚拟结构. Navarro等[11]研究异构车辆的多车道编队控制, 在平行于道路的纵向坐标系下使用了基于图的分布式控制方法, 能够快速适应车辆的增减和位置变化, 并能在编队内以协作的方式进行换道动作.但文中编队的车辆速度为定值, 无法满足不同交通情况下的变速需求.
上述工作中主要聚焦于编队的控制, 对于编队的行车环境却考虑较少.目前, 无人驾驶车辆和有人驾驶车辆将在一定时间内混合存在于道路中, 无人车编队的行车环境复杂多变, 需在编队控制中对环境因素给予考虑, 以增强多车道编队的避障能力和灵活性.
势场法是一类经典的避障轨迹规划方法, 其对障碍物和道路结构以及目标点建立相应的排斥势场和吸引势场, 在势场力的作用下规划出一条无碰撞的平滑轨迹.由于其能够对复杂的动态环境建立势场模型, 并快速获得规划结果, 适用于交通场景中的车辆避障轨迹规划. Bounini等[12]提出了一种改进的势场, 克服了可能出现的陷入局部最小点问题, 当根据梯度下降法进入全局最小点时, 增加一个排斥场, 以走出最小点, 但该方法的时间会因陷入最小点的次数发生变化, 同时有轨迹不平滑的可能. Gautam等[13]提出了一种方法, 使得多个机器人以链状编队从出发点到达目的点.使用A*算法规划静态地图下的轨迹, 使用势场法进行避障和跟踪期望轨迹, 尽可能地减小跟踪误差, 结合使用两种轨迹规划方法能够在获得较短轨迹的同时避开障碍物. Huang等[14]将势场法和模型预测控制方法结合, 使用优化器代替梯度下降法, 完成编队车辆轨迹规划和控制.上述研究对势场函数进行了设计, 提高了轨迹规划的合理性和避障的能力, 但缺乏考虑速度规划, 而在驾驶场景中的速度规划是自动驾驶非常重要的一环.
为此, 本文提出了一种基于图和势场法的多车道护航编队自动驾驶方法, 车辆在前后和左右方向上都与其他车辆保持组队关系, 能减轻串不稳定问题, 并允许动态地进行车辆加入和脱离.同时, 分布式的控制方法, 去除了中心节点, 能够提高车辆编队的容错性和稳定性.结合车辆横纵向控制器, 建立双层控制结构, 完成分布式车辆编队控制.上层为规划层, 将编队视为一个图结构, 编队整体沿着道路向前移动, 并将障碍物和道路结构考虑进来, 进行车辆的轨迹和速度规划, 完成编队与避障功能.下层为轨迹跟踪控制层, 基于车辆运动学设计车辆的横纵向控制器, 完成车辆的速度控制和轨迹跟踪.
本文结构如下:第1节介绍基于图的编队控制, 并设计不同场景下的编队调整策略; 第2节利用势场法对于车辆驾驶环境进行建模, 环境因素主要包括道路边界、分道线、环境车、编队内车辆等, 并介绍相应的车辆速度规划方法; 第3节为多车道编队算法实现, 以及无人车横纵向控制器的介绍.第4节为仿真环境下的实验, 在多个交通场景下对多车道编队方法进行验证, 并对实验结果进行分析; 第5节对全文进行总结.
1. 多车道无人车护航编队策略
假定编队由若干无人车组成, 每个车辆具备通信单元以及传感器, 能够与其他无人车通信并定位周边车辆, 同时能够感知道路结构, 分道线位置以及环境车辆的位置和速度等.
1.1 基于图的编队
一个简单的有向图定义为$ \mathcal {G} = (V, E) $, 其中$ V = \left\{v_{i}, i = 1, \cdots, N\right\} $为点集, $ E \subseteq V \times V $是边集. $ E $中的元素为有序的元素对$ e_{k} = \left(v_{i}, v_{j}\right), k = \{1, \cdots, |E|\} $, 同时定义关联矩阵$ \mathcal{I} \in {\bf{R}}^{N \times|E|} $:
$$ \begin{equation} \mathcal{I}_{i, k} = \left\{\begin{array}{ll}{-1}, &{\text { 若 }\; e_{k} = \left(v_{i}, v_{j}\right)} \\ {1}, &\; {\text {若}\; e_{k} = \left(v_{j}, v_{i}\right)} \\ {0}, &{\text { 其他 }}\; \end{array}\right. \end{equation} $$ (1) 其中, $ e_{k} $为图$ \mathcal {G} $中的第$ k $条边, 根据关联矩阵定义拉普拉斯矩阵$ \mathcal {L} $:
$$ \begin{equation} \mathcal{L} = \mathcal{I} \cdot \mathcal{W} \cdot \mathcal{I}^{\rm T} \end{equation} $$ (2) 式中, $ \mathcal{W} \in {\bf{R}}^{|E| \times|E|} $为对角矩阵, 矩阵元素$ \mathcal{W}_{i, j} $表示每条边$ e_{k} $的重要程度.编队控制方程[15]如下:
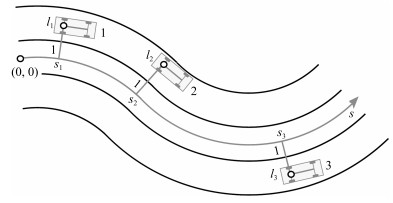
$$ \begin{equation} \dot{\pmb{x}} = -\mathcal{L}(\pmb{x}-\pmb{b}) \end{equation} $$ (3) 其中, $ \pmb{x} $为每个车辆的位置向量, $ \pmb{b} $为图$ \mathcal {G} $中的期望偏移.上述控制方程中并未考虑道路结构, 为了完成符合道路约束的编队控制, 采用沿道路中心线的曲线坐标系[11]$(s, l)$.车辆纵向坐标$(s)$为沿道路前进方向的距离, 横向坐标$(l)$为车辆距$s$坐标轴的最近距离(见图 1).
该曲线坐标系下, 每辆无人车的编队控制方程可写为下式:
$$ \begin{equation} \left[ \begin{array}{c}{\dot{s}} \\ {\dot{l}}\end{array} \right] = \left[ \begin{array}{c}{\sum\limits_{(i, j) \in V} w_{i, j} \cdot \left(s_{i, j}-b_{s}\right)} \\ {\sum\limits_{(i, j) \in V} w_{i, j} \cdot \left(l_{i, j}-b_{l}\right)}\end{array} \right]+\left[ \begin{array}{c}{v_{G_{s}}} \\ {v_{G_{l}}}\end{array} \right] \end{equation} $$ (4) 式中, $i, j$表示存在边的两个节点, 即车辆$i$与车辆$j$, $w_{i, j}$为边的权重, $s_{i, j}$和$l_{i, j}$为车辆$i$与车辆$j$的横纵向间距, $b_{s}$和$b_{l}$为图结构期望的横纵向车辆间距.
1.2 编队策略
车辆编队由分布于多车道的若干辆无人车组成, 每辆车都保存着编队的图结构以及自车在图中的对应关系, 通过通信获取图中相邻节点对应车辆的信息, 并根据基于图的编队控制方程进行自车的编队规划控制.
编队中存在一辆特殊车辆保存着整个编队中所有车辆和图节点的对应关系, 该车作为车辆加入和脱离编队以及切换编队结构的管理中心, 维护着车辆和图节点的对应关系, 本文称之为编队管理车辆.
1.2.1 编队车辆的避障策略
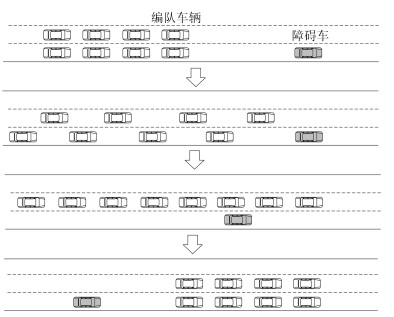
当环境中存在其他障碍车辆时, 编队将调整结构, 被阻塞车辆并入可通行车道, 整个编队进入临时避让状态, 以完成避障, 整个过程无需编队管理车辆参与.假定期望编队结构为八车两车道的矩形结构, 具体避障过程如图 2所示.
图 2中灰色车辆为慢速障碍车, 白色车辆为编队车辆, 初始编队为2车道矩形编队, 编队在感知到前方车道存在慢速车辆阻碍时, 编队进入临时状态, 被阻塞的编队车辆并入通畅车道中, 当超过障碍车时, 车辆恢复至原始车道, 编队整体恢复.
1.2.2 编队结构切换策略
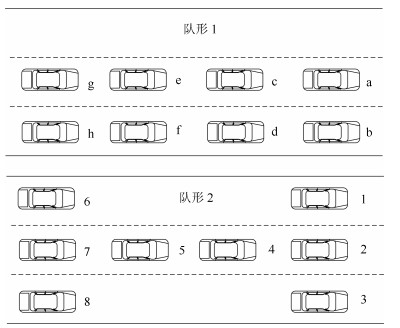
多车道编队在特定情况下需要主动进行编队结构的切换.图 3表示了由8辆车组成的两种队形, 编队主动切换队形时, 编队需重配置车辆在编队中的位置.如队形1向队形2切换时, 编队管理车辆假定期望队形存在于当前编队前方, 并按照距离最近原则给期望队形中的节点分配车辆, 优先分配期望队形中最前和最左的节点, 即先按照队形2中的数字顺序进行分配, 如距离位置1最近的为a车, 则队形1中的a车将分配至队形2中的1号位置, 当队形2中的所有节点都完成分配, 则每辆车的期望位置都是队形2中的某一位置, 每辆车根据期望位置调整实际位置, 完成由队形1到队形2的切换.
1.2.3 编队车辆的驶入与驶出策略
车辆加入编队, 需要编队管理车辆给新加入的车辆分配编队中的位置, 假设编队中已有$n$辆车, 新加入一辆车后, 编队管理车辆根据距离最近原则给$n+1$辆车重新映射到图结构中的节点.重映射过程分为两种情况, 第一种情况, 编队中存在无实际车辆对应的空节点, 则将空节点与实际车辆对应, 该车辆不一定为新加入车辆, 根据新加入车辆的位置, 可能编队中多辆车与图节点的对应关系需要改变.第二种情况, 编队图结构中并无空节点可容纳新加入车辆, 则需设计确定的新增节点策略(如矩形结构的重复[9]), 以扩展图结构, 进而转化为第一种情况进行处理.车辆加入的示意图如图 4所示.
图 4中, 虚线框为无实际车辆的空节点, 待加入车辆与编队管理车辆通信后, 编队管理车辆对部分编队车辆进行重映射, 为新加入车辆分配节点, 完成车辆加入.
类似地, 车辆脱离编队, 需要管理中心车辆删去脱离车辆与图节点的对应关系, 重新给剩余的车辆进行重映射, 由后方车辆补充因车辆脱离而产生的空节点, 避免编队出现不连通的情况, 更新车辆与图节点对应关系.
2. 基于势场法的无人车避撞规划
利用势场法对行车环境进行建模, 设计势场函数对环境风险进行量化, 并进行车辆的局部轨迹规划.车辆行车环境中的影响因素主要包括道路边界、分道线、环境车、编队内车辆等.因此将受控车的总势场$U$定义为道路边界势场$U_\text{road}$、环境车势场$U_\text{Ecar}$、编队车辆势场$U_\text{Fcar}$、保持车道势场$U_\text{Klane}$或换道势场$U_\text{Clane}$、车辆前进势场$U_\text{front}$的总和:
$$ \begin{align} U = &U_\text{road}+U_\text{Ecar}+U_\text{Fcar}+ \\& U_\text{front}+\left(U_\text{Klane} \text { or } U_\text{Clane}\right) \end{align} $$ (5) 2.1 道路边界势场
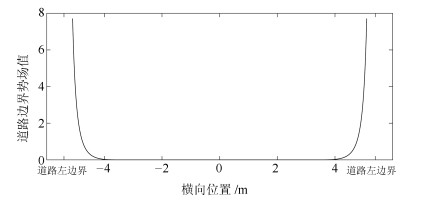
道路的边界是车辆不能逾越的区域, 因而在车辆靠近道路边界时, 势场值应迅速增大, 并在道路边界达到最大值, 其具体势场函数与文献[12]类似:
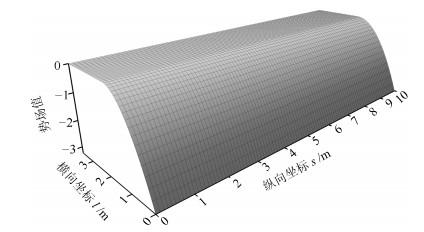
$$ \begin{equation} U_\text{road} = \frac{1}{2} k_\text{road}\left(\frac{1}{d( \text{road})}-\frac{1}{d_{ \text{road}}}\right)^{2} \end{equation} $$ (6) 其中, $d(\text{road})$为车辆与道路边界的距离, $k_\text{road}>0$为比例系数, $d_\text{road}$为道路边界的影响范围.假定车道宽为3.6 m, 边界影响范围为1.8 m, 图 5为3车道道路边界势场示意图.
2.2 分道线势场
分道线势场用于对车道进行划分, 当车辆没有换道需求时, 分道线势场应该使得车辆保持在车道中心.本文设计保持车道势场函数如下:
$$ \begin{equation} U_\text{Klane} = \frac{1}{2} \lambda_\text{Klane}\left(d_\text{mid}^\text{lane}\right)^{2} \end{equation} $$ (7) $d_\text{mid}^\text{lane}$为车辆距车道中心线的距离, $\lambda_\text{Klane}$ 为比例系数.其三维示意图如图 6所示.
当车辆有换道需求时, 势场应沿换道方向下降, 驱使车辆换道, 本文设计换道势场函数如下:
$$ \begin{equation} U_\text{Clane}(i) = \frac{1}{2} \lambda_\text{Clane}\left(d_\text{lane}^{j}\right)^{2} \end{equation} $$ (8) 其中, $d_\text{lane}^{j}$为和分道线的距离, $j\in(1, 2)$表示左分道线或右分道线, 当车辆需要向右换道时, $j=1$, 反之, $j=2$.其向右换道的车道势场分布示意图如图 7所示.
2.3 编队内车辆势场
对编队内车辆建立势场, 能够保证车辆在编队动态调整时, 编队内的车辆不发生碰撞, 其势场函数与道路边界势场函数[12]类似:
$$ \begin{equation} U_\text{Fcar}(i) = \frac{1}{2} k_\text{Fcar}\left(\frac{1}{d_{i}(\text{Fcar})}-\frac{1}{d_\text{ Fcar}}\right)^{2} \end{equation} $$ (9) 其中, $i$表示编队内第$i$辆车辆, $k_\text{Fcar}>0$为比例系数, $d_{i}(\text{Fcar})$为距离第$i$辆编队内车辆的距离, $d_\text{Fcar}$为编队内车辆的势场影响范围.
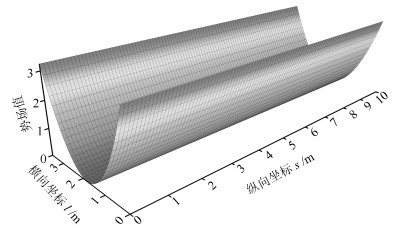
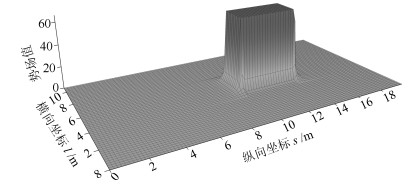
同时由于编队内车辆的速度相近, 相互间存在通信, 碰撞概率较小, 故编队内车辆的势场影响范围较小, 设计如图 8所示.
图 8中白色部分为车辆车体部分, 灰色范围为车辆势场的影响范围, 图中的$S1$, $S2$, $S3$三个参数决定了势场范围的大小, 由于编队内车辆碰撞风险较小, 可将编队内势场范围设定为固定值.根据与车辆的距离和式(9)得到势场值, 势场三维分布如图 9所示.
2.4 环境车势场
环境障碍车不属于编队车辆, 与编队中的车辆无法进行通信和协同驾驶, 只能依靠编队内车辆的传感器进行感知, 因此, 当编队车辆和障碍车车速差异较大时, 发生碰撞的危险较大, 尤其是车辆纵向上发生追尾的概率较高.面对无法通信并造成障碍的环境车(例如前方的慢速车辆), 可以采取减速跟车或换道超车的策略, 由于换道后环境车辆不再形成阻碍, 故障碍车辆的势场设计主要考虑被阻碍车采取减速跟车策略的情况.因此, 障碍车的势场应随着车间距离减小而平滑上升, 被阻碍车辆能够平滑地减速, 本文结合文献[12]设计环境车势场如下:
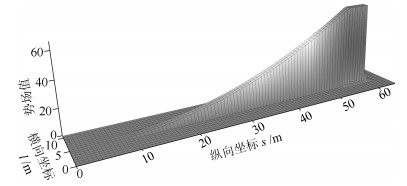
$$ \begin{align} U_\text{Ecar}(i) = \max\bigg( &k_\text{Ecar}\left(\frac{1}{d_{i}(\text{Ecar})}-\frac{1}{d_\text{Ecar}}\right)^{2}, \\ &\lambda_\text{Ecar}\left(S_\text{R}-d_{i}(\text{Ecar})\right)^{2}\bigg) \end{align} $$ (10) 其中, $d_{i}(\text{Ecar})$为距离第$i$辆阻碍车的距离, $d_\text{Ecar}$为阻碍车影响范围, $S_\text{R}$为车辆感知范围.阻碍车势场范围设计如图 10所示.
环境障碍车的势场范围主要有$L1$, $L2$, $L3$, $L4$, $L5$等5个参数确定, 由于环境车辆在纵向方向上发生碰撞概率较大, 故添加$L1$, $L2$作为安全冗余距离, 可以看做增大了车体, 间接减低与实际车体碰撞的可能. $L3$的取值应小于编队车辆传感器的范围, 其三维势场分布如图 11所示.
2.5 速度规划
势场法将行车环境的风险量化, 车辆的行车轨迹和速度都和环境势场有关, 首先根据势场函数计算车辆所受势场力[12]:
$$ \begin{equation} f_{*} = -\nabla U_{*}(Q) \end{equation} $$ (11) 其中, $U_{*}$为任意势场函数, $f_{*}$为对应产生的势场力, $Q=(x, y)$为车辆坐标, 势场力方向为势场值下降方向.
行驶区域越危险, 势场值越高, 车辆所受势场力越大, 应尽快驶离.因此, 本文进行速度规划时, 设定车辆受到的势场力和速度存在比例关系$K$, 即:
$$ \begin{equation} V_{\text {target}} = K \cdot f_\text{APF} \end{equation} $$ (12) 当车辆环境中不存在任何障碍时, 给车辆施加一个向前的虚拟力$f_\text{front}$, 驱使车辆匀速前进, 则:
$$ \begin{equation} f_{\text {front}} = \frac{1}{K} V_{\text {refer}} \end{equation} $$ (13) 其中, $V_\text{refer}$为车辆巡航的期望速度.
值得注意的是, 当车辆前方存在障碍车却无法换道避让时, 车辆应选择减速跟车, 速度降至与障碍车相同, 同时与障碍车保持安全距离.当车辆进入减速跟车状态时, 由于自车和障碍车的速度差并不确定, 需根据前方障碍车势场和速度重新设定势场力和速度的比例系数$K$ :
$$ \begin{equation} K = \frac{V_{\text {refer}}-V_{\text {ocar}}}{\lambda_\text{Ecar} \cdot\left(S_\text{R}-t_{\text {safe}} \cdot V_{\text {ocar}}\right) } \end{equation} $$ (14) 其中, $V_\text{refer}$为车辆巡航期望速度, $t_\text{safe}$为安全时距, $V_\text{ocar}$为前方障碍车速度, $S_\text{R}$为车辆定位障碍车的最大感知范围.当车辆设定$K$后, 车辆受到的势场会随着接近障碍车而增大, 进而速度降低, 当车辆与障碍车间距为最小安全距离时, 二者速度相等, 完成减速跟车行为.
3. 无人车跟踪控制
为完成编队驾驶, 车辆由2个独立的控制器进行横向与纵向控制.横向控制器控制车辆换道等动作, 保持车辆之间的横向间距, 以及与分道线的距离.纵向控制器控制车辆纵向运动, 跟踪期望的车间距.本文采用车辆运动学模型–自行车模型, 其方程[7]如下:
$$ \begin{equation} \left\{\begin{array}{l}{\dot{x} = \cos (\theta) \cdot v} \\ {\dot{y} = \sin (\theta) \cdot v} \\ {\dot{\theta} = \frac{\tan (\phi)}{L} \cdot v}\end{array}\right. \end{equation} $$ (15) 其中, $[x, y]^{\text{T}}$为车辆后轴中点的位置, $\theta$为车辆航向角和$s$轴夹角, $L$为车辆前后轴距, 输入为车辆速度$v$和前轮转角$\phi$.
3.1 横向控制器
车辆位置和参考轨迹都建立于以车辆自身作为原点的$s$ - $l$标系下, 则航向角误差$e_{\theta}=\theta$, 车辆的横向误差$e_{\bot}=l-l_\text{refer}$.采用Linderoth等[16]提出的车辆横向控制方法:
$$ \begin{align} &\tan (\phi({t})) = \\& \quad\frac{-\cos \left(e_{\theta}(t)\right) e^{\perp}(t)-\left(l_{1}+l_{2}\right) \sin \left(e_{\theta}(t)\right)}{l_{1}-\left(l_{1}+l_{2}\right) \cos \left(e_{\theta}(t)\right)+\sin \left(e_{\theta}(t)\right) e^{\perp}(t)} \end{align} $$ (16) 其中, $l_{1}$, $l_{2}$为大于0的系数.
3.2 纵向控制器
车辆需要跟踪的最终期望速度, 是基于图的编队规划与势场法的速度规划的叠加.其方程如下:
$$ \begin{equation} V_{\text {result}} = \left[ \begin{array}{c}{\dot{s}} \\ {\dot{l}}\end{array} \right] = \left[ \begin{array}{c}{\sum\limits_{(i, j) \in V} w_{i, j} \cdot \left(s_{i, j}-b_{s}\right)} \\ {\sum\limits_{(i, j) \in V} w_{i, j} \cdot\left(l_{i, j}-b_{l}\right)}\end{array} \right]+V_{\text {target}} \end{equation} $$ (17) 其中, $V_{\text{result}}$为车辆需要跟踪的最终速度, $V_{\text{target}}$为基于势场法的速度规划的期望速度.同时全局编队图结构分解为多个连通的局部图结构, 车辆与周围的车辆维持局部图结构, 计算维持编队需要的偏移.
本文采用PI控制器[7]进行纵向控制:
$$ \begin{equation} V(t) = \lambda_{1} e_{d}(t)+K_{I} \int_{0}^{t} e_{d}(\mathcal{T}) \text{d} \mathcal{T} \end{equation} $$ (18) 若车辆跟踪的期望速度$V_\text{result}$保持恒定, 则当时间趋于无穷时, 式(18)可近似为:
$$ \begin{equation} V(t) = \lambda_{1} e_{d}(t)+V_{\text {result}} \end{equation} $$ (19) 4. 编队算法实现与实验验证
本文实验为仿真实验, 使用交通流仿真软件SUMO进行交通场景的模拟, 本文编队算法以外部C++程序的形式存在, 通过TraCI接口控制SUMO中的无人车, 车辆模型为运动学模型.
4.1 编队算法实现
本文无人车多车道编队算法过程如下:
1) 编队管理车辆获取环境信息, 并决策编队的状态切换, 同时更新编队车辆的期望位置.
2) 编队中的车辆获取环境信息, 并通过车间通信获取周围无人车的位置速度等信息, 根据更新后的期望位置, 进行自车行为决策(换道, 加减速).
3) 车辆根据驾驶行为和期望位置进行局部轨迹规划, 首先是基于图的编队轨迹规划, 算出保持编队结构的局部轨迹.然后进行基于人工势场的避障轨迹规划, 根据车辆受到的势场, 规划局部避障轨迹, 最后综合两部分轨迹, 得到期望轨迹.
其伪代码如下:
输入.车辆当前状态
输出.车辆期望轨迹
$1)\quad\ EnvInfo \gets getEnv\_info(vehicle)$
$2)\quad\ If\quad isConvoyManagerV(vehicle)$
$3)\quad\ \quad ConvoyStateSwitching(EnvInfo)$
$4)\quad\ \quad UpdateVehiclesTP()$
$5)\quad\ End$
$6)\quad\ BehaviorDecision(vehicle, EnvInfo)$
$7)\quad\ VehiclesInfo \gets V2V(vehicle)$
$8)\quad\ CTraj \gets GraphPlanner(VehiclesInfo)$
$9)\quad\ PV \gets getPotentialFieldValue(vehicle)$
$ 10)\quad ATraj \gets APF(vehicle, EnvInfo, PV)$
$ 11)\quad FTraj \gets ConbineTraj(CTraj, ATraj)$
4.2 实验场景设计
无人车护航编队行驶的交通环境复杂, 为尽可能真实地模拟现实交通场景, 本文在实验场景中选取了车辆完成编队、编队换道避障、编队减速跟车、编队切换队形等较为典型的编队场景.
场景1:车辆组成编队.道路为三车道, 初始状态下, 队中只有1辆无人车, 后续7辆无人车会陆续加入编队, 7辆车随机分布在不同车道, 通过车–车通信完成编队.其中车辆初始速度为20 m/s, 编队期望速度为25 m/s.
场景2:编队换道避障.编队在行驶过程中遇到部分车道存在慢速障碍车时, 采取换道超车的策略, 避障完成后恢复编队.慢速障碍车速度为15 m/s.
场景3:编队减速跟车.编队遇到前方所有的车道都存在慢速环境车, 无法安全超车时, 进行减速跟车以避碰, 慢速障碍车速度为15 m/s, 最小安全距离设定为3 s时距.
场景4:编队切换队形.由2车道的矩形编队切换至3车道的工字形编队.
上述4个场景示意图如图 12所示.
实验中相关参数如表 1所示.
表 1 势场与控制器相关参数Table 1 Parameters of the potentials and the controller and potential field参数 值 单位 参数 值 单位 $k_{*}$ 0.8 - $L3$ 135 m $\lambda_{*}$ $2.1/K$ - $L4$ 0.8 m ${S1}$ 5 m $L$ 3 m ${S2}$ 2 m $l_{1}$ 3 - ${S3}$ 0.8 m $l_{2}$ 10 - ${L1}$ 5 m $\lambda_{1}$ 0.5 - ${L2}$ 15 m $K$ 1.25 - 表 1中$k_{*}$表示$k_\text{road}$、$k_\text{Ecar}$、$k_\text{Fcar}$三个系数, $\lambda_{*}$表示$\lambda_\text{Ecar}$、$\lambda_\text{Clane}$、$\lambda_\text{Klane}$三个系数, $K$为初始值, 行驶过程中会根据行车环境和车辆决策发生变化.
实验约束有, 车辆前轮转角范围为$-$ 25度到25度, 车辆纵向加速度范围为$-$ 0.4 g到0.2 g, 加速度变化率为$-$2 g到2 g, 前轮转角变化率最大为20度每秒.
4.3 实验结果分析
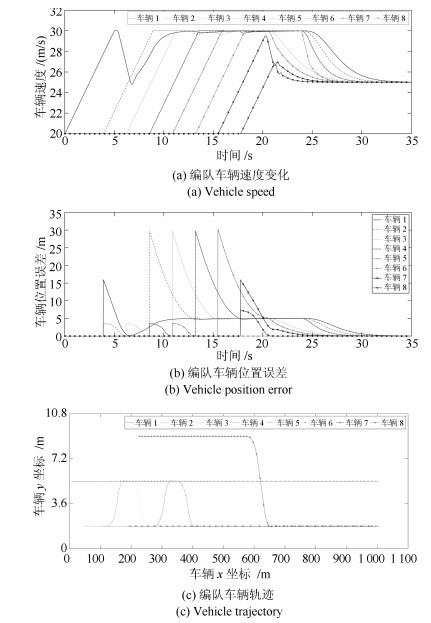
图 13为场景1编队车辆的速度、误差以及轨迹变化图, 误差为车辆距离编队中期望位置的距离.其中, 车辆初始速度为20 m/s, 车辆加入编队后, 期望速度变为25 m/s.车辆于不同时间相继加入编队, 当8辆汽车均加入编队后, 所有车辆速度逐渐稳定在25 m/s的期望速度.图 13 (b)为场景1的车辆位置误差变化图, 车辆加入编队时, 并不在期望的编队位置, 误差上升.当车辆加入编队后, 调整自车位置缩短与期望位置的距离, 误差逐渐下降.当全部车辆加入编队后, 编队误差逐渐下降并保持稳定.图 13 (c)为场景1中的车辆轨迹, 车道宽为3.6米, 车辆换道平滑, 均在期望车道的中心线上行驶, 并完成期望编队结构, 即八车二车道的矩形结构.
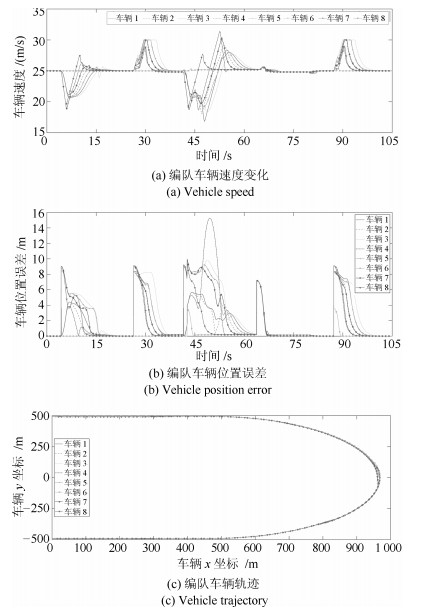
图 14为场景2中编队仿真实验结果, 当编队感知到前方存在环境车时, 编队结构调整变化, 无人车的期望位置改变, 编队位置误差上升.在第5 s、40 s和65 s时刻, 车辆切换期望队形对环境车进行避让, 第25 s和88 s时刻, 编队完成避让, 恢复队形.整个过程速度在20 m/s和30 m/s的范围内, 车辆加速度均在约束内, 并平稳在期望速度.车辆换道轨迹平滑, 均在道路中心线行驶, 编队弯道与直道表现平稳.
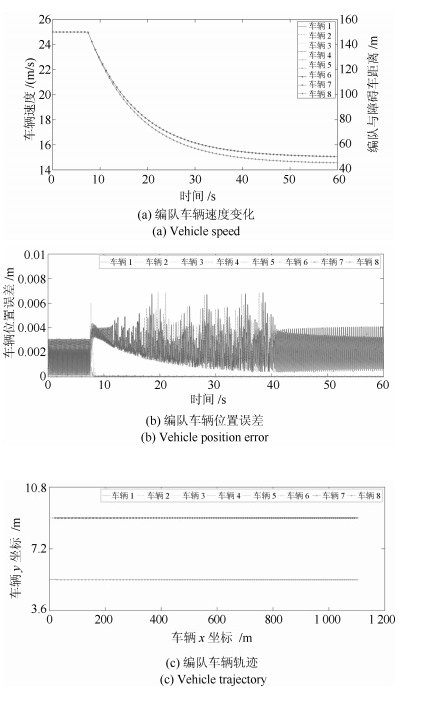
图 15中为场景3中实验结果图, 编队在第9 s左右感知到前方三个车道都存在慢速障碍车, 编队进行减速跟车, 避免碰撞.图 15 (a)中为编队车辆速度和与障碍车距离, 编队速度平滑下降, 当与车辆保持3 s时距的预设最短安全距离时, 编队速度下降至15 m/s, 与障碍车同速.忽略仿真环境中的车间通信的通信时延整个过程中, 编队车辆速度变化相近, 编队误差较小, 编队结构保持稳定, 车辆行驶轨迹保持在期望车道的中心线上, 平稳行驶.
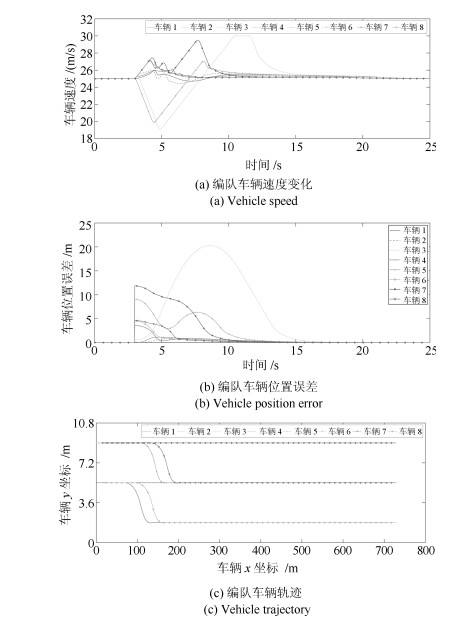
图 16中为场景4中编队车辆的速度、位置误差以及轨迹变化图, 在第3秒时, 编队主动切换队形, 由两车道矩形编队切换为三车道工字形编队, 无人车期望位置变化, 车辆位置误差在该时刻上升, 随后, 无人车调整位置与速度, 以缩短与期望位置的距离.车辆3前期需避让其他编队车辆, 误差缓慢上升, 第8秒后, 无需避让其他车辆, 位置误差开始下降.编队车辆换道轨迹平滑且符合预期, 队形切换顺利, 编队误差逐渐下降且平稳.
5. 结束语
本文提出了一种多车道护航编队方法, 设计了护航编队变化策略, 完善了编队层次上的结构调整逻辑, 提高了编队对于不同交通场景的适应能力, 其次, 使用势场法对多车道编队的行车环境建立了势场模型, 并结合基于图的编队方法, 对无人车进行统一轨迹与速度规划, 保持编队结构的同时提高了车辆避障能力.通过车辆组成编队、编队换道避障, 编队减速跟车、编队切换队形等多个典型场景下的仿真实验, 从无人车及编队的速度、位置误差、轨迹等状态响应来看, 本文提出的护航编队算法能够达到预期的控制效果, 并较好地完成各种场景下的编队行驶.
-
表 1 势场与控制器相关参数
Table 1 Parameters of the potentials and the controller and potential field
参数 值 单位 参数 值 单位 $k_{*}$ 0.8 - $L3$ 135 m $\lambda_{*}$ $2.1/K$ - $L4$ 0.8 m ${S1}$ 5 m $L$ 3 m ${S2}$ 2 m $l_{1}$ 3 - ${S3}$ 0.8 m $l_{2}$ 10 - ${L1}$ 5 m $\lambda_{1}$ 0.5 - ${L2}$ 15 m $K$ 1.25 -  下载: 导出CSV
下载: 导出CSV
-
[1] Xu L, Wang L Y, Yin G, Zhang H. Communication information structures and contents for enhanced safety of highway vehicle platoons. IEEE Transactions on Vehicular Technology, 2014, 63(9): 4206-4220 doi: 10.1109/TVT.2014.2311384 [2] Farokhi F, Johansson K H. A game-theoretic framework for studying truck platooning incentives. In: Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems. Hague, Netherlands: IEEE, 2013. 1253-1260 [3] Liang K Y, Martensson J, Johansson K H. When is it fuel efficient for a heavy duty vehicle to catch up with a platoon? International Federation of Automatic Control Proceedings Volumes, 2013, 46(21): 738-743 [4] Xiao L, Gao F. Practical string stability of platoon of adaptive cruise control vehicles. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1184-1194 doi: 10.1109/TITS.2011.2143407 [5] Seiler P, Pant A, Hedrick K. Disturbance propagation in vehicle strings. IEEE Transactions on Automatic Control, 2004, 49(10): 1835-1842 doi: 10.1109/TAC.2004.835586 [6] Kato S, Tsugawa S, Tokuda K. Vehicle control algorithms for cooperative driving with automated vehicles and intervehicle communications. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(3): 155-161 doi: 10.1109/TITS.2002.802929 [7] Gowal S, Falconi R, Martinoli A. Local graph-based distributed control for safe highway platooning. In: Proceedings of the 2010 IEEE International Conference on Intelligent Robots and Systems. Taiwan, China: IEEE, 2010. 6070-6076 [8] Falconi R, Gowal S, Martinoli A. Graph based distributed control of non-holonomic vehicles endowed with local positioning information engaged in escorting missions. In: Proceedings of the 2010 IEEE International Conference on Intelligent Robots and Systems. Taiwan, China: IEEE, 2010. 3207-3214 [9] Marjovi A, Vasic M, Lemaitre J, Martinoli A. Distributed graph-based convoy control for networked intelligent vehicles. In: Proceedings of the 2015 IEEE Intelligent Vehicles Symposium. Seoul, South Korea: IEEE, 2015. 138-143 [10] Qian X, De La Fortelle A, Moutarde F. A hierarchical model predictive control framework for on-road formation control of autonomous vehicles. In: Proceedings of the 2016 IEEE Intelligent Vehicles Symposium. Gotenburg, Sweden: IEEE, 2016. 376-381 [11] Navarro I, Zimmermann F, Vasic M, Martinoli A. Distributed graph-based control of convoys of heterogeneous vehicles using curvilinear road coordinates. In: Proceedings of the 19th International Conference on Intelligent Transportation Systems. Rio de Janeiro, Brazil: IEEE, 2016. 879-886 [12] Bounini F, Gingras D, Pollart H, Gruyer D. Modified artificial potential field method for online path planning applications. In: Proceedings of the the 2017 IEEE Intelligent Vehicles Symposium. California, USA: IEEE, 2017. 180-185 [13] Gautam R, Kala R. Motion planning for a chain of mobile robots using A* and potential field. Robotics, 2018, 7(2): 20-21 doi: 10.3390/robotics7020020 [14] Huang Z, Chu D, Wu C, He Y. Path planning and cooperative control for automated vehicle platoon using hybrid automata. IEEE Transactions on Intelligent Transportation Systems, 2018, 1(99): 1-16 [15] Mesbahi M, Egerstedt M. Graph Theoretic Methods in Multiagent Networks. New Jersey: Princeton University Press, 2010. [16] Linderoth M, Soltesz K, Murray R M. Nonlinear lateral control strategy for nonholonomic vehicles. In: Proceedings of the the 2008 American Control Conference. Washington, USA: IEEE, 2008. 3219-3224 -

 下载:
下载:




计量
- 文章访问数: 2683
- HTML全文浏览量: 694
- PDF下载量: 335
- 被引次数: 0
