

-
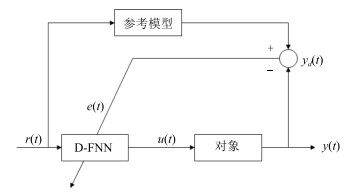
摘要: 神经网络是模拟人脑结构,它具有大规模并行及分布式信息处理能力,但是不能处理和描述模糊信息.模糊系统具有推理过程容易理解,但它很难实现自适应学习的功能.如果结合神经网络与模糊系统,可以取长补短.基于此,本文提出了一种新型动态模糊神经网络(Dynamic fuzzy neural network,D-FNN)学习算法.因为它具有结构和参数同时调整且学习速度快等优点,所以既可以在模糊逻辑系统中包含低级的神经网络学习和计算功能,也可以为神经网络提供高级的类似人的思维和推理的模糊逻辑系统.此外,本文还开发了生物医学工程应用算法程序,针对药物注射系统的直接逆控制案例进行了仿真,结果表明:D-FNN具有实时学习和控制能力强、参数估计和结构辨识同时进行等优点.Abstract: The neural network simulates the human brain structure with the capabilities processing large-scale parallel and distributed information, which cannot process and describe fuzzy information. The inference processing of the fuzzy system is easy to understand, but it is difficult to realize the adaptive learning. If combining neural networks with fuzzy systems, they can learn from each other. This paper proposes a novel dynamic fuzzy neural network (D-FNN) learning algorithm. Because it has the advantages of simultaneous adjustment of structure and parameters and fast learning speed, it can not only include low-level neural network learning and calculation functions in fuzzy logic systems, but also provide the neural network with the high-level fuzzy logic system which is similar to human thinking and reasoning. In addition, this paper also develops a biomedical engineering application algorithm program, which simulates the direct inverse control case of the drug injection system. The simulating results show that D-FNN has many advantages such as real-time learning, robust control ability, simultaneous parameter estimation and structure identification.
-
Key words:
- Dynamic fuzzy neural network (D-FNN) /
- neural network /
- fuzzy logic /
- fuzzy rules
1) 本文责任编委 刘艳军 -
表 1 D-FNN与IANC的性能比较(mmHg)
Table 1 Performance comparison between D-FNN and IANC (mmHg)
方法 $ \Delta p_{\max} $ 方法 $ \Delta p_{\max} $ D-FNN 9.01 IANC 10.1  下载: 导出CSV
下载: 导出CSV
-
[1] Chen R J, Zhao A, Chen H L, Zhao Z H, Cai J, Wang C C, et al. Cardiopulmonary benefits of reducing indoor particles of outdoor origin: a randomized, double-blind crossover trial of air purifiers. Journal of the American College of Cardiology, 2015, 65(21): 2279-2287 doi: 10.1016/j.jacc.2015.03.553 [2] Chao C T, Chen Y J, Teng C C. Simplification of fuzzy neural systems using similarity analysis. IEEE Transactions on Systems, Man, and Cybernetics, Part B, Cybernetics, 1996, 26(2): 344-354 doi: 10.1109/3477.485887 [3] 何正风, 张德丰, 孙亚民.高斯激活函数特征值分解修剪技术的D-FNN算法研究.中山大学学报(自然科学版), 2013, 52(1): 34- 39 http://d.old.wanfangdata.com.cn/Periodical/zsdxxb201301007He Zheng-Feng, Zhang De-Feng, Sun Ya-Min. Research on adaptive dynamic fuzzy neural network algorithms with Gauss activation function and eigenvalue decomposition pruning technologies. Acta Scientiarum Naturalium Universitatis Sunyatseni, 2013, 52(1): 34-39 http://d.old.wanfangdata.com.cn/Periodical/zsdxxb201301007 [4] 马莉, 张德丰, 许勇.基于动态模糊神经网络的生物工程算法研究.计算机工程与科学, 2010, 32(3): 137-140 doi: 10.3969/j.issn.1007-130X.2010.03.036Ma Li, Zhang De-Feng, Xu Yong. A bio-engineering algorithm research based on dynamic fuzzy neural networks. Computer Engineering and Science, 2010, 32(3): 137-140 doi: 10.3969/j.issn.1007-130X.2010.03.036 [5] 张德丰, 卢清华, 周燕.一种新型的动态模糊神经网络算法.控制工程, 2009, 16(4): 464-467, 471 doi: 10.3969/j.issn.1671-7848.2009.04.024Zhang De-Feng, Lu Qing-Hua, Zhou Yan. Novel dynamic fuzzy neural networks algorithm. Control Engineering of China, 2009, 16(4): 464-467, 471 doi: 10.3969/j.issn.1671-7848.2009.04.024 [6] 马莉, 张德丰, 马子龙.滑动窗与修剪技术的动态模糊神经网络方法研究.中山大学学报(自然科学版), 2010, 49(1): 48-52 http://d.old.wanfangdata.com.cn/Periodical/zsdxxb201001011Ma Li, Zhang De-Feng, Ma Zi-Long. Dynamic fuzzy neural network method research of the glide window and pruning technology. Acta Scientiarum Naturalium Universitatis Sunyatseni, 2010, 49(1): 48-52 http://d.old.wanfangdata.com.cn/Periodical/zsdxxb201001011 [7] 左军, 周灵, 李晓东.基于规则产生准则与修剪策略的D-FNN算法研究.中山大学学报(自然科学版), 2015, 54(5): 43-48 http://d.old.wanfangdata.com.cn/Periodical/zsdxxb201505010Zuo Jun, Zhou Ling, Li Xiao-Dong. The rule criteria and pruning strategy based on D-FNN algorithm research. Acta Scientiarum Naturalium Universitatis Sunyatseni, 2015, 54(5): 43-48 http://d.old.wanfangdata.com.cn/Periodical/zsdxxb201505010 [8] Platt J. A resource-allocating network for function interpolation. Neural Computation, 1991, 3: 213-225 doi: 10.1162/neco.1991.3.2.213 [9] 孙俞超, 李德.基于节点特征的矢量地图零水印算法.地理与地理信息科学, 2017, 33(3): 17-21 doi: 10.3969/j.issn.1672-0504.2017.03.004Sun Yu-Chao, Li De. Vector map zero-watermark algorithm based on node feature. Geography and Geo-information Science, 2017, 33(3): 17-21 doi: 10.3969/j.issn.1672-0504.2017.03.004 [10] Lu Y, Sundararajan N, Saratchandran P. A sequential learning scheme for function approximation by using minimal radial basis function networks. Neural Computation, 1997, 9: 461-478 doi: 10.1162/neco.1997.9.2.461 [11] 王永杰, 白艳萍.基于主成分分析的PSO-BP算法在GDP和CPI预测中的应用.重庆理工大学学报(自然科学), 2017, 31(4): 150-154 http://d.old.wanfangdata.com.cn/Periodical/cqgxyxb201704025Wang Yong-Jie, Bai Yan-Ping. Application of PSO-BP algorithm based on principal component analysis in prediction of GDP and CPI. Journal of Chongqing University of Technology (Natural Science), 2017, 31(4): 150-154 http://d.old.wanfangdata.com.cn/Periodical/cqgxyxb201704025 [12] Wu S, Er M J. Dynamic fuzzy neural networks-a novel approach to function approximation. IEEE Transactions on Systems, Man, and Cybernetics, Part B, Cybernetics, 2000, 30(2): 358-364 doi: 10.1109/3477.836384 [13] Peng Y, Yue M. A zero-watermarkings scheme for vector map based on feature vertex distance ratio. Journal of Electrical and Computer Engineering, 2015, 2015(2): 1-6 https://www.hindawi.com/journals/jece/2015/421529/ [14] Er M J, Wu S. A fast learning algorithm for parsimonious fuzzy neural systems. Fuzzy Sets and Systems, 2002, 126(3): 337-351 doi: 10.1016/S0165-0114(01)00034-3 [15] 陈子豪, 龙华, 曹伟.基于改进型PSO-BP神经网络算法的水质评价.信息技术, 2017, (8): 11-15, 20 http://d.old.wanfangdata.com.cn/Periodical/xxjs201708003Chen Zi-Hao, Long Hua, Cao Wei. Based on the improved PSO-BP neural network algorithm in the quality assessment of water environment. Information Technology, 2017, (8): 11 -15, 20 http://d.old.wanfangdata.com.cn/Periodical/xxjs201708003 [16] Polycarpou M, Conway J. Indirect adaptive nonlinear control of drug delivery systems. IEEE Transactions on Automatic Control, 1998, 43(6): 849-856 doi: 10.1109/9.679024 -

 下载:
下载:


图(6) / 表(1)
计量
- 文章访问数: 1376
- HTML全文浏览量: 412
- PDF下载量: 82
- 被引次数: 0
