

Structure Design for Recurrent Fuzzy Neural Network Based on Wavelet Transform Fuzzy Markov Chain
-
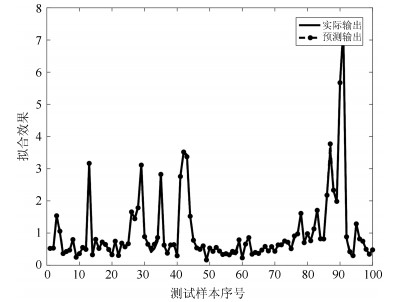
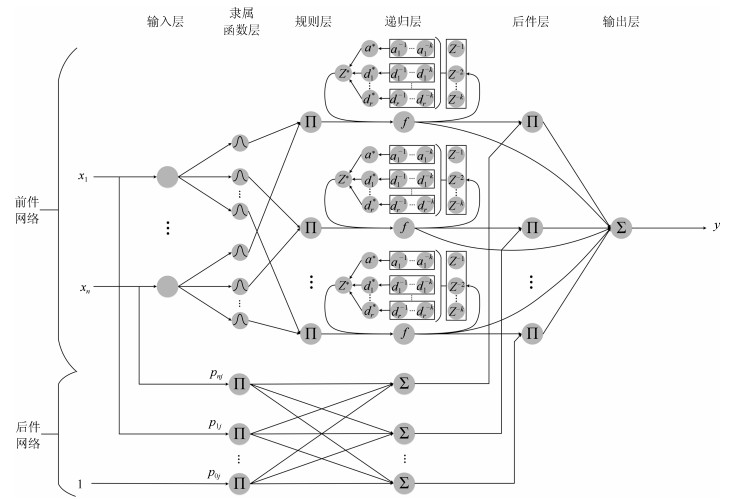
摘要: 针对递归模糊神经网络(Recurrent fuzzy neural network, RFNN)的递归量难以自适应的问题, 提出一种基于小波变换–模糊马尔科夫链(Wavelet transform fuzzy Markov chain, WTFMC)算法的RFNN模型.首先, 在时间维度上记录隐含层神经元的模糊隶属度, 并采用小波变换将该时间序列进行分解, 通过模糊马尔科夫链对子序列的未来时段进行预测, 之后将各预测量合并后代入递归函数中得到具有自适应性的递归量.其次, 利用梯度下降算法更新RFNN的参数来保证神经网络的精度.最后, 通过非线性系统建模中几个基准问题和实际污水处理中关键水质参数的预测实验, 证明了该神经网络模型的可行性和有效性.Abstract: Aiming to solve the problem that the recursive variable in the recurrent fuzzy neural network (RFNN) is difficult to be self-adaptive, this paper proposes an RFNN structure model based on wavelet transform fuzzy Markov chain (WTFMC). Firstly, it records the fuzzy membership degree of hidden layer neurons in time dimension, and decomposes the time series by wavelet transform. The future period of the subsequence is predicted by fuzzy Markov chain, and the adaptive recursive variables are obtained by combining the predictors into the recursive function. Secondly, the gradient descent algorithm is utilized to update the parameters of RFNN in order to ensure the accuracy of neural network. Finally, the feasibility and validity of the neural network model are demonstrated by several benchmark problems in nonlinear system modeling and the prediction of key water quality parameters in the practical wastewater treatment.
-
Key words:
- Recurrent fuzzy neural network /
- wavelet transform /
- fuzzy Markov chain /
- dynamic modeling /
- wastewater treatment
-
近年来, 随着计算机、通信技术的快速发展, 多智能体理论成为研究热点, 并且相关控制方法被广泛应用于无人机集群、无人船编队、车辆编队等领域[1-3]. 作为多智能体领域的基础研究, 多智能体系统的一致性问题一直备受关注. 多智能体系统的一致性是指智能体间通过信息交互实现系统状态或输出趋同. 在过去十几年间, 基于一致性理论的多智能体系统协同控制得到了广泛研究[4-6].
对于实际系统来说, 故障是在所难免的, 其中执行机构故障由于其普遍性和破坏性而被广泛研究[7-8]. 为了保证多智能体系统的安全可靠运行, 容错控制问题一直都是重要研究方向. 文献[9-10]所设计的容错控制器旨在保证执行器发生故障时系统的稳定. 为实现执行器故障补偿控制, 文献[11-12]通过构造观测器来估计故障参数, 并基于估计结果设计容错控制器. 文献[12]研究基于分布式观测器的领导−跟随多智能体系统容错控制问题. 随着自适应技术的发展, 基于自适应技术的容错控制得到了广泛应用. 通过在控制器中引入自适应参数增益, 系统具有良好的容错性. 文献[13]在控制器中引入自适应参数, 降低了执行器故障产生的负面影响, 保证了系统的稳定性. 文献[14]研究一类离散多智能体系统的容错跟踪控制问题, 基于自适应技术来补偿死区和执行器故障对控制性能的影响. 综上所述, 多智能体系统的容错控制已经得到广泛研究. 考虑到实际多智能体系统中计算、通信等硬件资源的有限性, 研究网络通信受限情况下多智能体系统的可靠控制问题显然更有意义.
众所周知, 数字控制系统主要考虑的是非连续信息传输情况, 网络通信环境下智能体通常也不是每时每刻获取邻居的状态信息. 近年来, 随着事件触发技术在控制领域的广泛应用和不断发展, 科研人员开始研究基于事件触发控制的多智能体系统一致性问题, 以减轻通信资源的占用[15-16]. 在早期的多智能体系统事件触发控制研究中, 相邻智能体仍然需要持续通信, 这无疑导致了通信带宽的浪费. 为解决这一问题, 文献[17-19]提出一种固定采样周期的通信机制, 智能体之间只在特定时刻进行通信. 但是固定时间周期采样通信有很大的局限性, 仍然会产生不必要的采样. 为克服上述问题, 文献[20]基于周期采样机制研究线性多智能体系统的事件触发控制问题, 该触发机制要求智能体之间的信息传递仅在离散采样时刻进行.
值得一提的是, 在实际应用过程中智能体的状态可能是未知的. 文献[21-22]研究基于观测器的容错控制问题, 控制器所需的状态信息从状态观测器获得, 避免对系统状态的依赖. 文献[23]基于事件触发技术设计全分布式观测器和控制器, 该控制器仅需获取邻居的状态以及自身状态的观测信息. 在此基础上, 一种更激进的事件触发通信协议被提出, 该协议只需要获取自身信息, 当满足触发条件时才获取相邻智能体的观测值. 在文献[24]中, 智能体的通信触发判定条件仅需要测量误差, 因此克服了连续通信的限制, 同时减少了控制器的更新次数. 文献[25]所设计的控制器不仅在自身达到事件触发阈值时更新, 而且在其邻居达到事件触发阈值时更新. 在此基础上, 文献[26]使用观测器对领导者的未知参数进行预测. 文献[27]针对有向生成树拓扑结构的多智能体系统, 提出一种基于自触发通信的自适应容错控制方案. 为进一步扩大触发间隔, 文献[28-29]提出动态事件触发的概念, 通过在触发函数中引入动态变量或自适应参数, 提高触发阈值[30]. 近年来, 动态事件触发方法被大量应用于多智能体系统[31-33], 并取得了很好的效果. 文献[33]在触发函数中加入一个正常量, 可以避免芝诺现象, 同时可以延长触发间隔, 但多智能体系统仅可以达成有限共识.
为使多智能体系统具有良好的容错性, 同时降低智能体之间的通信频率, 文献[34-36]研究基于事件触发的容错控制问题. 文献[34]研究基于自适应事件触发技术的多智能体系统可靠控制问题. 文献[35]基于观测器研究多智能体系统自适应事件触发容错同步问题. 文献[36]基于事件触发机制设计开环观测器, 减少了智能体间的通信次数, 同时使得多智能体系统具有良好的容错性. 文献[37]设计一种新的分布式鲁棒容错控制器, 解决了不连续通信条件下的多智能体系统容错控制问题. 文献[38]研究具有执行器失效故障的异构线性多智能体系统的事件触发容错一致性问题. 文献[39]针对严格反馈离散多智能体系统, 提出一种自适应多梯度递归强化学习事件触发容错控制方案. 尽管基于事件触发的多智能体的容错控制问题已经得到广泛研究, 但采用事件触发机制的目标是降低智能体的控制器更新频率, 忽略了对多智能体系统通信资源的优化. 此外, 基于事件触发机制的多智能体系统故障类型及其处理方式研究还不够深入. 考虑到已有研究的不足, 本文研究基于事件触发通信协议的多智能体系统可靠共识问题, 提出一种新的事件触发通信机制, 有效地减少智能体之间的通信次数, 证明所设计的事件触发通信机制可以有效地避免芝诺现象. 本文的创新点如下:
1) 本文设计的事件触发通信机制是用来决定智能体之间是否通信, 控制器的更新只是多智能体系统通信的结果. 此外, 为延长触发间隔, 同时保持理想的动态特性, 所设计的控制器在触发间隔内是时变的.
2) 与现有的动态事件触发机制相比, 本文提出一种新的触发函数, 可以在不影响多智能体系统最终一致性的情况下有效地降低智能体之间的通信频率.
3) 不同于已有的多智能体系统动态事件触发自适应可靠控制方法, 本文考虑单个智能体的每个执行器都可能发生不同的失效故障.
1. 预备知识
1.1 图论
图$ {\cal{G}} = ({\cal{V}},\;{\cal{E}}) $由顶点集$ {\cal{V}} $和边集$ {\cal{E}} $组成, 其中$ {\cal{V}} = \{1,\;2,\;\cdots ,\;N\} $表示节点, $ {\cal{E}}\subseteq {\cal{V}}\times {\cal{V}} $表示节点间的信息流. $ {\cal{A}} = [a_{im}]\in {\bf{R}}^{N\times N} $表示$ {\cal{G}} $的加权邻接矩阵. 如果$ a_{im} = 0 $, 意味着智能体$ i $无法从$ m $获取信息; 如果$ a_{im}>0 $, 表示智能体$ i $可以接收到$ m $的状态信息. $ L = [l_{im}]\in {\bf{R}}^{N\times N} $表示$ {\cal{G}} $的拉普拉斯矩阵. 若$ i = m $, 则$ l_{ii} = \sum_{m = 1,\;m\neq i}^N a_{im} $; 否则, $ l_{im} = -a_{im} $. 如果图之间任意两个相邻节点均可以相互交流信息, 则该图是无向的; 如果任意两个节点之间存在一条连接彼此的路径, 则认为该图是全连通的.
假设 1. 图$ {\cal{G}} $是全连通且无向的.
引理 1. 如果假设1成立, 拉普拉斯矩阵$ L $的最小特征值为0且其余的特征值非负, $ L $矩阵为半正定矩阵[34].
定义 1. 矩阵的谱范数或向量的欧几里得范数表示为$ \vert \vert \cdot \vert\vert $, $ \otimes $表示克罗内克积, $ \text{diag}\{\cdots \} $表示对角矩阵, $ (\cdots ) $表示列向量.
定义 2. 本文中的一致意味着任意两个智能体的状态$ \lim_{t\to\infty} \Vert x_i(t) -x_m(t)\Vert = 0 $.
1.2 问题描述
本文考虑具有$ N $个智能体的线性多智能体系统, 第$ i $个智能体的状态表示为
$$ \begin{split} \dot{x}_i(t) = Ax_i(t)+Bu_i(t)\\ \end{split} $$ (1) 其中, $ x_i(t) \in {\bf{R}}^z $表示智能体$ i $的系统状态, $ u_i(t) \in {\bf{R}}^n $表示智能体$ i $的控制输入, $ A $和$ B $为已知的具有适当维数的矩阵.
当系统发生执行器故障时, 智能体$ i $的控制输入可以改写成如下形式
$$ \begin{equation} u_i ^F(t) = ({\boldsymbol{I}}_{n}-\Lambda_i) u_i(t) \end{equation} $$ (2) 本文考虑到智能体控制输入的每一个执行器均有可能发生故障, 其中$ {\boldsymbol{I}}_{n} $表示$ n $维单位矩阵, $ \Lambda_i = \text{diag}\{\rho_{i1},\;\rho_{i2},\;\cdots ,\;\rho_{in}\} $, $ \rho_{ij} $为智能体$ i $的第$ j $个执行器的故障因子. 定义
$$ \begin{split} &\Lambda = \text{diag}\{ \Lambda_1,\;\Lambda_2,\; \cdots ,\;\Lambda_N\}\\& \hat{\Lambda}_i = \text{diag}\{\hat{\rho}_{i1},\;\hat{\rho}_{i2},\; \cdots ,\;\hat{\rho}_{in}\}\\& \hat{\Lambda} = \text{diag}\{\hat{\Lambda}_1,\;\hat{\Lambda}_2,\; \cdots ,\;\hat{\Lambda}_N\}\\& \bar{\Lambda}_i = \text{diag} \{\bar{\rho}_{i1},\;\bar{\rho}_{i2},\; \cdots ,\;\bar{\rho}_{in}\}\\& \bar{\Lambda} = \text{diag}\{\bar{\Lambda}_1,\;\bar{\Lambda}_2,\; \cdots ,\;\bar{\Lambda}_N\} \end{split} $$ $$ \begin{split} & \underline{\Lambda}_i = \text{diag}\{\underline{\rho}_{i1},\;\underline{\rho}_{i2},\; \cdots ,\;\underline{\rho}_{in}\}\\& \underline{\Lambda} = \text{diag}\{\underline{\Lambda}_1,\;\underline{\Lambda}_2,\; \cdots ,\;\underline{\Lambda}_N\}\\& \bar{\hat{\Lambda}}_i = \text{diag}\{\bar{\hat{\rho}}_{i1},\;\bar{\hat{\rho}}_{i2},\; \cdots ,\;\bar{\hat{\rho}}_{in}\}\\& \bar{\hat{\Lambda}} = \text{diag}\{\bar{\hat{\Lambda}}_1,\;\bar{\hat{\Lambda}}_2,\; \cdots ,\;\bar{\hat{\Lambda}}_N\}\\& \underline{\hat{\Lambda}}_i = \text{diag}\{\underline{\hat{\rho}}_{i1},\;\underline{\hat{\rho}}_{i2},\; \cdots ,\;\underline{\hat{\rho}}_{in}\}\\& \nonumber \underline{\hat{\Lambda}} = \text{diag}\{\underline{\hat{\Lambda}}_1,\;\underline{\hat{\Lambda}}_2,\; \cdots ,\;\underline{\hat{\Lambda}}_N\} \end{split} $$ 其中, $ \hat{\rho}_{ij} $为待设计的自适应参数; $ \bar{\rho}_{ij} $和$ \underline{\rho}_{ij} $分别表示$ \rho_{ij} $的上界和下界, $ \bar{\hat{\rho}}_{ij} $和$ \underline{\hat{\rho}}_{ij} $分别表示$ \hat{\rho}_{ij} $的上界和下界.
此外, 故障存在上界和下界, 即$ 0 < \underline{\hat{\rho}}_{ij} \leq \hat{\rho}_{ij} \leq $ $ \bar{\hat{\rho}}_{ij} <1 $, $ \bar{\rho}_{ij} = \bar{\hat{\rho}}_{ij} $, $ \underline{\rho}_{ij} = \underline{\hat{\rho}}_{ij} $, $ \bar{\Lambda}_i = \bar{\hat{\Lambda}}_i $, $ \underline{\Lambda}_i = \underline{\hat{\Lambda}}_i $.
假设 2. 系统状态矩阵$ A $和$ B $是可控的.
引理 2. 芭芭拉引理[34], 如果$ y(t) $和$ \dot{y}(t) $有界, 并且$ \int_{0}^{\infty}y^{\rm{T}}(t)y(t)\text{d}t<\infty $, 则$ \lim_{t\to\infty} y(t) = 0 $.
引理 3. 杨氏不等式[38], 如果$ x>1 $, $ y>1 $, 并且${1}/{x}+{1}/{y} = 1 $, 则$||a^{\rm{T}}b||\leq{||a^x||}/x+||b^y||/{y}$.
2. 主要结果
2.1 通信协议和容错控制器设计
本节提出一个新的事件触发通信协议和容错控制器$ u_i(t_k^i) $. 智能体$ i $的通信触发时刻为$ t_k^i $, 其中$ k = 0,\;1,\cdots $. 智能体$ i $在$ [0,\;t_{k+1}^i] $期间接收到智能体$ m $状态信息的时刻为$ {t_{k^m}^i} $. 多智能体系统的一致性误差为
$$ \begin{equation} \xi_i(t) = \sum\limits_{m = 1}^{N} a_{im}(x_i(t)-x_m(t)) \nonumber \end{equation} $$ $$ \begin{equation} \xi_i(t_k^i) = \sum\limits_{m = 1}^{N} a_{im}(x_i(t_k^i)-x_m(t_{k^m}^i)) \nonumber \end{equation} $$ 事件触发状态误差$ e_{i}(t) $为$ e_{i}(t) = x_i(t_k^i) - x_i(t) $, 事件触发一致性误差$ e_{\xi_i}(t) $定义为
$$ \begin{split} e_{\xi_i}(t)& = \xi_i(t_k^i)-\xi_i(t)\\ \end{split} $$ (3) 定义
$$ \begin{split} &\xi^{\text{T}}(t) = (\xi_1^{\text{T}}(t),\;\xi_2^{\text{T}}(t),\;\cdots ,\;\xi_N^{\text{T}}(t))\\&e^{\text{T}}_{\xi}(t) = (e^{\text{T}}_{\xi_1}(t),\;e^{\text{T}}_{\xi_2}(t),\;\cdots ,\; e^{\text{T}}_{\xi_N}(t))\\&\xi^{\text{T}}(t_k) = (\xi^{\text{T}}_1(t_k^1),\;\xi^{\text{T}}_2(t_k^2),\;\cdots ,\;\xi^{\text{T}}_N(t_k^N)) \nonumber \end{split} $$ 自适应参数$ \hat{\rho}_{ij} $的引入可以提升控制器的容错能力, 它被设计为如下形式
$$ \dot{\hat{\rho}}_{ij} = \text{Proj}_{[\bar{\rho}_{ij},\;\underline{\rho}_{ij}]}(\hat{\rho}_{ij}) = \left\{ \begin{aligned} & 0 , \left\{ \begin{aligned} &\hat{\rho}_{ij}(t) = \bar{\rho}_{ij}\; \text{且}\; \theta_{ij}> 0 \\& \text{或者} \\ &\hat{\rho}_{ij}(t) = \underline{\rho}_{ij} \;\text{且}\; \theta_{ij} < 0 \end{aligned} \right.\\ & \tau_{ij} \theta_{ij} ,\quad \quad \quad \quad \quad \quad \;\text{否则} \end{aligned} \right. $$ (4) 其中, $\text{Proj}_{[\bar{\rho}_{ij},\;\underline{\rho}_{ij}]}(\hat{\rho}_{ij})$表示投影运算, $ \hat{\rho}_{ij} $被投影到区间$[\bar{\rho}_{ij},\;\underline{\rho}_{ij}]$内, $ \tau_{ij} > 0 $, $ \theta_{ij} $被定义为
$$ \theta_{ij} = (1+\hat{\rho}_{ij}(t))\Vert \xi_i^{\rm{T}}(t_k^i)[PB]_{j}\Vert^2-\sigma_{ij}(t)\hat{\rho}_{ij}(t) $$ (5) 其中, $ \sigma_{ij}(t) $满足$\int_{0}^{ +\infty} \sigma_{ij}(t) {\rm{d}}t = 0$, $ P $是一个待求解的正实对称矩阵, $ [PB]_{j} $为矩阵$ PB $的第$ j $列.
控制器$ u_i(t_k^i) $被设计为
$$ \begin{split} u_i(t_k^i) = &- ({\boldsymbol{I}}_{n}+\hat {\Lambda}_i(t) )B^{\rm{T}}P\xi_i(t_k^i) \end{split} $$ (6) 注 1. 不同于文献[34]中所设计的容错控制器, 本文控制器$ u_i(t_k^i) $中的$ \xi_i(t_k^i) $不仅在自身达到触发条件时更新, 其邻居达到触发条件时也会更新.
注 2. 与文献[35-36, 40]的工作不同, 控制器$ u_i(t_k^i) $在触发间隔内是时变的. 事件触发通信协议仅决定智能体间是否通信, 通信协议的设计初衷是避免相邻智能体的实时或者频繁通信, 基于通信结果完成控制器更新. 因此, 控制器$ u_i(t_k^i) $在触发间隔内时变也是合理的. 基于自适应技术设计的自适应参数$ \hat{\rho}_{ij} $可以补偿执行器失效带来的负面影响. 此外, 得益于触发间隔内时变的控制器$ u_i(t_k^i) $, 系统具有更好的动态响应.
智能体$ i $的系统动态为
$$ \dot{x}_i(t) = Ax_i(t)+Bu_i(t_k^i)$$ (7) 对于多智能体系统而言, 需要针对每一个智能体给出其事件触发通信条件. 动态事件触发协议为
$$ t_{k+1}^i= \text{inf} \{t> t_{k}^i :f_i(e_i(t),\;\xi_i(t_k^i),\;\eta_i(t))\leq 0 \} $$ (8) 其中, $ \text{inf} $表示集合的下确界, 动态事件触发函数$ f_i(e_i(t), \;\xi_i(t_k^i),\;\eta_i(t)) $被设计为如下形式
$$ \begin{split} &f_i(e_i(t),\xi_i(t_k^i),\eta_i(t))=\\& \qquad(\omega_i\xi^{\rm{T}}_i(t_k^i) PB({\boldsymbol{I}}_n+\hat{\Lambda}_i(t)) B^{\rm{T}}P\xi_i(t_k^i)\;-\\&\qquad\kappa \gamma e^{\rm{T}}_i(t)PBB^{\rm{T}}Pe_i(t))\varphi_i+\eta_i(t) \end{split} $$ (9) 其中, $ \varphi_i $为正实数, 动态变量$ \eta_i(t) $满足如下条件
$$ \dot{\eta}_i(t) = \left\{ \begin{aligned} & -\lambda \eta_i(t)+\vartheta_i \text{e}^{-\digamma_it}, & & \Gamma > 0 \\ & -\lambda \eta_i(t) - \Gamma +\vartheta_i \text{e}^{-\digamma_it}, & & \text{否则} \end{aligned} \right. $$ (10) 其中, $ \Gamma $为
$$ \begin{split} \Gamma=\;& \omega_i\xi^{\rm{T}}_i(t_k^i) PB({\boldsymbol{I}}_{n}+\hat{\Lambda}_i(t)) B^{\rm{T}}P\xi_i(t_k^i)\;-\\ &\kappa \gamma e^{\rm{T}}_i(t)PBB^{\rm{T}}Pe_i(t) \end{split} $$ (11) 其中, $ \omega_i $, $ \kappa $, $ \gamma $, $ \lambda $, $ \vartheta_i $和$ \digamma_i $均为已知正实数.
采用事件触发通信协议是为了减少智能体间不必要的通信, 智能体$ i $在未通信时无法获取邻居的实时信息, 事件触发函数$ f_i(e_i(t), \;\xi_i(t_k^i),\; \eta_i(t)) $仅需要智能体自身的状态信息及其邻居在上一触发时刻的状态信息.
在触发函数中引入动态变量$ \eta_i(t) $可以提高触发阈值, 延长触发间隔$ \{t_{k+1}^i-t_{k}^i \} $. 文献[33]通过在事件触发函数中引入正常量来进一步延长触发间隔, 但会对多智能体系统的一致性产生负面影响. 本文设计的触发机制(9)不仅可以延长触发间隔, 还可以满足多智能体系统的最终一致性要求.
多智能体系统可以表示为
$$ \begin{split} \dot{x}(t) = \;&({\boldsymbol{I}}_N\otimes A)x(t)-({\boldsymbol{I}}_N\otimes B)({\boldsymbol{I}}_{Nn}-\Lambda\;+\\ &({\boldsymbol{I}}_{Nn}-\Lambda) \hat {\Lambda} ) ({\boldsymbol{I}}_N\otimes B^{\rm{T}}P)(e_{\xi}(t)+\xi(t)) \end{split} $$ 状态一致性误差$ \varepsilon $表示为
$$ \begin{split} \varepsilon(t) = (M\otimes {\boldsymbol{I}}_z)x(t) \end{split} $$ (12) 其中, $ M = {\boldsymbol{I}}_N-(1/N) {\bf{1}}_N\otimes{\bf{1}}_N^{\text{T}} $, $ {\bf{1}}_N $表示元素值全为$ 1 $的列向量. 容错控制器(6)的设计目的是使多智能体系统状态一致性误差$ \varepsilon $收敛至0
$$ \begin{split} \dot{\varepsilon}(t)=\;& (M\otimes A)x(t)-(M\otimes {\boldsymbol{I}}_z)({\boldsymbol{I}}_N\otimes B)({\boldsymbol{I}}_{Nn}-\Lambda)\;\times\\&({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t)) ({\boldsymbol{I}}_N\otimes B^{\rm{T}}P)\xi(t_k) \end{split} $$ 传统事件触发控制的设计目的是减少控制器$ u_i(t_k^i) $的更新次数, 但在多智能体系统中由于通信带宽的限制, 智能体间不能频繁通信. 文中采用事件触发机制(8)来决定智能体是否与邻居通信, 在触发通信间隔内控制器$ u_i(t_k^i) $只使用自身的状态信息和邻居在触发时刻的已知信息, 减少了不必要的的通信.
注 3. 自适应参数$ \hat{\Lambda}_i(t) $不仅可以补偿执行器故障, 还可以延长触发间隔$\{ t_{k+1}^i-t_k^i \}$.
2.2 一致性证明
针对多智能体系统事件触发可靠一致性控制问题, 本文给出如下定理.
定理 1. 如果假设1和假设2成立, 控制器(6)和事件触发机制(8)可以保证多智能体系统在发生执行器故障时的一致性.
证明. 构造李雅普诺夫函数$ V(t) = V_1(t)+ V_2(t)\;+ V_3(t) $, 其中
$$ \begin{split} V_1(t)& = \varepsilon^{\text{T}}(t)(L\otimes P)\varepsilon(t)\\ V_2(t)& = \sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{(\hat{\rho}_{ij}-\rho_{ij})^2}{4\tau_{ij}}\\ V_3(t)& = \sum\limits_{i = 1}^{N} \eta_i(t) \end{split} $$ 已知$ LM = L $, 等式可以改写为
$$ \begin{split} \dot{ V}_1(t) =\;& \varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\ &2\varepsilon^{\text{T}}(t)(L\otimes PB)({\boldsymbol{I}}_{Nn}-\Lambda\;+\\ &({\boldsymbol{I}}_{Nn}-\Lambda)\hat{\Lambda}(t) )({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t_k) \end{split} $$ (13) 易得$ \xi(t) = (L\otimes {\boldsymbol{I}}_z)\varepsilon(t) $, 则下式成立
$$ \begin{split} \dot{ V}_1(t) =\;& \varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\ &2\xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)({\boldsymbol{I}}_{Nn}-\Lambda\;+\\ &({\boldsymbol{I}}_{Nn}-\Lambda)\hat{\Lambda}(t) )({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t_k) \end{split} $$ (14) 已知$ e_{\xi_i}(t) = \xi_i(t_k^i)-\xi_i(t) $, 可得
$$ \begin{split} \dot{ V}_1(t) =\;& \varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\&2\xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)\Omega ({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t)) ({\boldsymbol{I}}_N\;\otimes\\ &B^{\text{T}}P)e_{\xi}(t)-2\xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}\;+\\ &\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t) \\[-1pt]\end{split} $$ (15) 其中, $ {\boldsymbol{I}}_{Nn}-\Lambda = \Omega $.
根据$ e_{\xi_i}(t) = \xi_i(t_k^i)-\xi_i(t) $, 式(15)可写为如下形式
$$ \begin{split} \dot{ V}_1(t)=\;& \varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\&2\xi^{\text{T}}(t_k)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\;\otimes\\& B^{\text{T}}P)e_{\xi}(t)+2e_{\xi}^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}\;+\\&\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)e_{\xi}(t)-2\xi^{\text{T}}(t)({\boldsymbol{I}}_N\;\otimes\\& PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t)\\[-1pt] \end{split} $$ (16) 已知$ e_{\xi_i}(t) = \xi_i(t_k^i)-\xi_i(t) $, 式(16)可改写为
$$ \begin{split} \dot{ V}_1(t)=\;& \varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\&2\xi^{\text{T}}(t_k)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t)) \nonumber ({\boldsymbol{I}}_N\;\otimes\\& B^{\text{T}}P)\xi(t_k)+2\xi^{\text{T}}(t_k)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}\;+\\&\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t)+2e_{\xi}^{\text{T}}(t)({\boldsymbol{I}}_N\;\otimes\\& PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)e_{\xi}(t)\;-\\&2\xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}\;+\\&\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t) \end{split} $$ 进一步, 根据引理3可得
$$ \begin{split} & 2\xi^{\text{T}}(t_k)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t) \leq \\&\qquad \xi^{\text{T}}(t_k)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\;\otimes \\&\qquad B^{\text{T}}P)\xi(t _k)+\xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}\;+\\&\qquad\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t)\\[-1pt] \end{split} $$ (17) 根据不等式(17), 可得
$$ \begin{split} \dot{ V}_1(t) \leq\;& \varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\&\xi^{\rm{T}}(t_k)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\;\otimes\\& B^{\text{T}}P)\xi(t_k)+2e_{\xi}^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}\;+\\&\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)e_{\xi}(t)-\xi^{\text{T}}(t)({\boldsymbol{I}}_N\;\otimes\\& PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t)\\[-1pt] \end{split} $$ (18) 如果$ \hat{\rho}_{ij}(t) = \bar{\rho}_{ij} $且$ \theta_{id} > 0 $, 或者$ \hat{\rho}_{ij}(t) = $$\underline{\rho}_{ij} $且$ \theta_{id} < 0 $, 可以得到$ 2(\hat{\rho}_{ij}-\rho_{ij}) \theta_{id} \geq 0 $.
$ \dot{V}_2(t) $满足如下不等式
$$ \begin{split} \dot{V}_2(t)\leq\;& \sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})((1\;+\\ &\hat{\rho}_{ij}(t))\Vert \xi_i^{\text{T}}(t_k^i)[PB]_{j}\Vert^2-\sigma_{ij}(t)\hat{\rho}_{ij}(t))\end{split} $$ (19) 已知$ \hat{\rho}_{ij}(t)\leq \bar{\hat{\rho}}_{ij} $, 则下式成立
$$ \begin{split} \dot{V}_2(t)\leq\;& \sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}( \bar{\hat{\rho}}_{ij}-\rho_{ij})(1\;+\\ &\hat{\rho}_{ij}(t))\Vert \xi_i^{\text{T}}(t_k^i)[PB]_{j}\Vert^2\;-\\&\sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t) \end{split} $$ (20) 基于等价变换, 可得
$$ \begin{split} \dot{V}_2(t)\leq\;&\frac{1}{2} \xi^{\text{T}}(t_k)({\boldsymbol{I}}_N\otimes PB)(\bar{\Lambda}-\Lambda)({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))\;\times\\&({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t_k)\;-\\ &\frac{1}{2}\sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t) \\[-1pt]\end{split} $$ (21) 已知$ \xi(t_k) = e_{\xi}(t)+\xi(t) $, 可得
$$ \begin{split} \dot{V}_2(t)\leq\;& \xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)(\bar{\Lambda}-\Lambda)({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\;\otimes\\& B^{\text{T}}P)\xi(t)+e^{\text{T}}_{\xi}(t)({\boldsymbol{I}}_N\otimes PB)(\bar{\Lambda}-\Lambda)({\boldsymbol{I}}_{Nn}\;+\\ &\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)e_{\xi}(t)\;-\\ &\sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t) \\[-1pt]\end{split} $$ (22) 根据触发函数(8), 可得
$$ \begin{equation} \Gamma>-\frac{1}{\varphi_i}\eta_i(t) \end{equation} $$ (23) 关于动态变量$ \eta_i(t) $和$ \dot{V}_3 (t) $, 如下不等式成立
$$ \begin{split}& -\lambda \eta_i(t)+\vartheta_i \text{e}^{-\digamma_it}\leq \dot{\eta}_i(t)<\\ &\qquad-\left(\lambda- \frac{1} {\varphi_i}\right) \eta_i(t)+\vartheta_i \text{e}^{-\digamma_it} \end{split} $$ (24) $$ \begin{split} &\sum\limits_{i = 1}^{N}-\lambda \eta_i(t)+\vartheta_i \text{e}^{-\digamma_it}\leq\dot{ V}_3(t)<\\ &\qquad\sum\limits_{i = 1}^{N} -\left(\lambda- \frac{1} {\varphi_i}\right) \eta_i(t)+\vartheta_i \text{e}^{-\digamma_it} \end{split} $$ (25) 综合以上结果, $ \dot V(t) $满足如下不等式
$$ \begin{split} \dot V(t)=\;& \dot V_1(t)+\dot V_2(t)+\dot V_3(t)<\\&\varepsilon^{\text{T}}(t)(L\otimes (A^{\rm{T}}P+PA))\varepsilon(t)\;-\\&\xi^{\text{T}}(t_k)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t)) ({\boldsymbol{I}}_N\;\otimes\\& B^{\text{T}}P)\xi(t_k)+2e_{\xi}^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}\;+\\&\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)e_{\xi}(t)-\xi^{\text{T}}(t)({\boldsymbol{I}}_N\;\otimes\\& PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t)\;+\\ & \xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB)(\bar{\Lambda}-\Lambda)({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_N\;\otimes\\& B^{\text{T}}P)\xi(t)+e^{\text{T}}_{\xi}(t)({\boldsymbol{I}}_N\otimes PB)(\bar{\Lambda}-\Lambda)({\boldsymbol{I}}_{Nn}\;+\\&\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)e_{\xi}(t)\;-\\&\sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t)\;- \\&\sum\limits_{i = 1}^{N} \left(\left(\lambda- \frac{1} {\varphi_i}\right)\eta_i(t)-\vartheta_i \text{e}^{-\digamma_it}\right) \end{split} $$ 合并同类项, 可得
$$ \begin{split} \dot V(t) <&\;\varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\&\xi^{\text{T}}(t_k)({\boldsymbol{I}}_N\otimes PB)\Omega({\boldsymbol{I}}_{Nn}+\hat{\Lambda})({\boldsymbol{I}}_N\;\otimes\\& B^{\text{T}}P)\xi(t_k)-\xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB) \Pi ({\boldsymbol{I}}_N\;\otimes\\& B^{\text{T}}P)\xi(t)+e^{\text{T}}_{\xi}(t)({\boldsymbol{I}}_N\otimes PB)\Psi ({\boldsymbol{I}}_{Nn}\;+\\&\hat{\Lambda}(t))({\boldsymbol{I}}_N\otimes B^{\text{T}}P)e_{\xi}(t)\;-\\&\sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t)\;-\\&\sum\limits_{i = 1}^{N} \left(\left(\lambda- \frac{1} {\varphi_i}\right)\eta_i(t)-\vartheta_i \text{e}^{-\digamma_it}\right) \end{split} $$ (26) 其中, $ \Pi = {\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t)-\bar{\Lambda}-\bar{\Lambda}\hat{\Lambda}(t) $, $ \Psi = 2{\boldsymbol{I}}_{Nn}+ \bar{\Lambda}\;-$ $3\Lambda $.
$$ \begin{split} &\sum\limits_{i = 1}^{N}e^{\text{T}}_{\xi _i}(t) PBB^{\text{T}}P e_{\xi _i}(t) = e^{\text{T}}(t)(L^2\otimes PBB^{\text{T}}P)e(t) \leq\\&\qquad \gamma \sum\limits_{i = 1}^{N}e^{\text{T}}_i(t)PBB^{\text{T}}Pe_i(t) \\[-1pt]\end{split} $$ (27) 其中, $ \gamma \;=\; \lambda_{\max}(L^2\otimes {\boldsymbol{I}}_n) \;=\; \lambda_{\max}(L^2)\lambda_{\max}( {\boldsymbol{I}}_n)\; =$ $ \lambda_{\max}(L^2) $, 定义$ \kappa = \max \nolimits_{i,\;j} ((\bar{\hat{\rho}}_{ij}+1)(2+\bar{\hat{\rho}}_{ij}-3\underline{\rho}_{ij})) $, $ \omega_i = \min \nolimits_{i} (1-\bar \rho _{ij}) $.
对矩阵进行变换, 可得
$$ \begin{split} \dot V(t) <\;&\varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\&\xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB) \Pi ({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t)\;-\\&\sum\limits_{i = 1}^{N} \omega_i\xi^{\text{T}}_i(t_k^i) PB({\boldsymbol{I}}_n+\hat{\Lambda}_i(t)) B^{\text{T}}P\xi_i(t_k^i)\; +\\ &\sum\limits_{i = 1}^{N}\kappa e^{\text{T}}_{\xi_i}(t) PBB^{\text{T}}Pe_{\xi_ i}(t)\;-\\&\sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t)\;-\\& \sum\limits_{i = 1}^{N} \left(\left(\lambda- \frac{1} {\varphi_i}\right)\eta_i(t)-\vartheta_i \text{e}^{-\digamma_it}\right)\\[-1pt] \end{split} $$ (28) 根据不等式(27), 可得
$$ \begin{split} \dot V(t) <\;& \varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\&\xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB) \Pi ({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t)\;-\\&\sum\limits_{i = 1}^{N}\omega_i\xi^{\text{T}}_i(t_k^i) PB({\boldsymbol{I}}_n+\hat{\Lambda}_i(t)) B^{\text{T}}P\xi_i(t_k^i)\;+\\&\kappa \gamma \sum\limits_{i = 1}^{N}e^{\text{T}}_i(t)PBB^{\text{T}}Pe_i(t)\;-\\& \sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t)\;- \\& \sum\limits_{i = 1}^{N} \left(\left(\lambda- \frac{1} {\varphi_i}\right) \eta_i(t)-\vartheta_i \text{e}^{-\digamma_it}\right) \end{split} $$ 基于所设计的触发函数(8), 上述不等式可以改写为
$$ \begin{split} \dot V(t) <\;&\varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)\;-\\&\sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t)\;-\\&\xi^{\text{T}}(t)({\boldsymbol{I}}_N\otimes PB) \Pi({\boldsymbol{I}}_N\otimes B^{\text{T}}P)\xi(t)\;+\\& \sum\limits_{i = 1}^{N} \frac{1} {\varphi_i}\eta_i(t) - \sum\limits_{i = 1}^{N} \left( \left(\lambda- \frac{1} {\varphi_i}\right) \eta_i(t)-\vartheta_i \text{e}^{-\digamma_it}\right) \end{split} $$ (29) 对不等式(29)合并同类项, 可得
$$ \begin{split} \dot V(t) <\;& \varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA))\varepsilon(t)+\sum\limits_{i = 1}^{N} \vartheta_i \text{e}^{-\digamma_it}\;-\\&\varepsilon^{\text{T}}(t)(L\otimes PB) \Pi (L\otimes B^{\text{T}}P)\varepsilon(t) \;-\\&\sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t)\;-\\ &\sum\limits_{i = 1}^{N} \left(\lambda- \frac{2} {\varphi_i}\right) \eta_i(t) \\[-1pt]\end{split} $$ (30) 其中, 需要确保以下不等式成立
$$ \begin{split} L\otimes (A^{\text{T}}P+PA)-(L\otimes PB) \Pi (L\otimes B^{\text{T}}P) < 0 \end{split} $$ (31) 在不等式(31)左右两边同时乘以$ {\boldsymbol{I}}_N\otimes P^{-1} $, 易得
$$ \begin{equation*} \begin{split} L\otimes (P^{-1}A^{\text{T}}+AP^{-1}) -(L\otimes B) \Pi (L\otimes B^{\text{T}}) <0 \end{split} \end{equation*} $$ 已知$ \Pi \geq ({\boldsymbol{I}}_{Nn}+\underline{\hat{\Lambda}})({\boldsymbol{I}}_{Nn}-\bar{\Lambda}) $, 可得
$$ \begin{split} &\varepsilon^{\text{T}}(t)(L\otimes (P^{-1}A^{\text{T}}+AP^{-1})-(L\otimes B) \Pi (L\;\otimes \\ &\qquad B^{\text{T}})) \varepsilon(t) \leq \varepsilon^{\text{T}}(t)(L\otimes (P^{-1}A^{\text{T}}+AP^{-1})\;-\\&\qquad(L\otimes B) ({\boldsymbol{I}}_{Nn}+\underline{\Lambda})({\boldsymbol{I}}_{Nn}-\bar{\Lambda}) (L\otimes B^{\text{T}})) \varepsilon(t) \leq \\&\qquad\varepsilon^{\text{T}}(t)(L\otimes (P^{-1}A^{\text{T}}+AP^{-1})-\delta(L^2\otimes B B^{\text{T}})) \varepsilon(t) \end{split} $$ (32) 其中, $ \delta $是正实常量, $ \delta = \min \nolimits_{i,\;j} ((\underline{\rho}_{ij}+1)(1- \bar{\hat{\rho}}_{ij})) $.
基于引理1, 必将存在一个酉矩阵$ U = [({\bf{1}}/ \sqrt{N}) Y] $, 使得$ U^{\text{T}}LU $ = $ \text{diag}\{0,\lambda_2,\cdots ,\lambda_N\} $. 令$\bar{ \varepsilon} = (U^{\text{T}}\;\otimes {\boldsymbol{I}}_z )\varepsilon$, $ \lambda_2 $表示拉普拉斯矩阵$ L $的最小特征根.
基于假设1, 不等式(32)可作如下变换
$$ \begin{split} & \varepsilon^{\text{T}}(t)(L\otimes (P^{-1}A^{\text{T}}+AP^{-1})-\delta(L^2\otimes B B^{\text{T}})) \varepsilon(t) \leq \\& \sum\limits_{i = 2}^{N}\lambda_i( \bar{ \varepsilon}_i^{\text{T}}(t) (P^{-1}A^{\text{T}}+AP^{-1}-\lambda_2\delta B B^{\text{T}}) \bar{ \varepsilon}_i(t) )<0 \end{split} $$ (33) 引理 4. 基于文献[41]中的黎卡提不等式$ PA\;+ A^{\text{T}}P-\varpi PBB^{\text{T}}P+Q<0 $, 在系统状态矩阵$ (A,\;B) $可控的情况下, $ P $可通过如下线性矩阵不等式求解. 其中$ P $和$ Q $均为正定实对称矩阵, $ \varpi $为正实数
$$ \left[ {\begin{array}{cc} P^{-1}A^{\text{T}}+ AP^{-1}-\varpi BB^{\text{T}} & P^{-1} \\ P^{-1} & -Q^{-1} \end{array} } \right] <0$$ (34) 注 4. 根据引理4, 不等式(33)一定是可解的, 并且文中所提不等式(31)具有较小的保守性. 当拉普拉斯矩阵$ L $已知时, 可以通过求解不等式(31)获得矩阵$ P $, 进而完成控制器设计. 若仅已知拉普拉斯矩阵$ L $的最小和最大特征值, 可以通过求解不等式(34) 来完成控制策略设计.
对不等式(30)两边从$ 0 $至$ t $开始积分
$$ \begin{split} {V}(t)\;- &\;\int_{0}^{t}\varepsilon^{\text{T}}(t)(L\otimes (A^{\text{T}}P+PA)-(L\;\otimes\\& PB) ({\boldsymbol{I}}_{Nn}+\hat{\Lambda}(t))({\boldsymbol{I}}_{Nn}-\bar{\Lambda}) (L\;\otimes\\& B^{\text{T}}P)) \varepsilon(t) {\text{d}}t < {V}(0)\;-\\&\sum\limits_{i = 1}^{N}\int_{0}^{t} \left(\lambda-\frac{2}{\varphi_i}\right) \eta_i(t) {\text{d}}t+\sum\limits_{i = 1}^{N}\int_{0}^{t} \vartheta_i \text{e}^{-\digamma_it} {\text{d}}t\;-\\&\sum\limits_{i = 1}^{N}\sum\limits_{j = 1}^{n}\int_{0}^{t}\frac{1}{2}(\hat{\rho}_{ij}-\rho_{ij})\sigma_{ij}(t)\hat{\rho}_{ij}(t) {\text{d}}t\\[-1pt] \end{split} $$ (35) 根据芭芭拉引理[34] (引理2)可以得到
$$ \begin{split} \lim_{t\to\infty} \Vert \varepsilon(t) \Vert = 0 \end{split} $$ (36) □ 以上完成了多智能体系统一致性的证明, 在第 2.3节中将证明所设计的事件触发通信机制(8)可以排除芝诺现象.
注 5. 根据不等式(35), 可以看出放松触发条件会对多智能体系统的一致性产生负面影响. 本文设计的事件触发函数$ f_i(e_i(t),\;\xi_i(t_k^i),\;\eta_i(t)) $可以延长触发间隔且多智能体系统最终可以实现一致性.
注 6. 本文设计事件触发机制的初衷是智能体分布式按需通信, 也就是智能体不需要实时获得邻居的信息. 文中所设计的触发通信机制(8)和控制器(6)仅需要获取自身状态信息$ x_i(t) $和触发时刻的邻居信息$ x_m(t_{k^m}^i) $.
2.3 芝诺现象的排除
芝诺现象的出现将会对多智能体系统的稳定性带来影响, 当事件触发通信机制在很短的时间内频繁触发, 智能体间频繁的通信势必会对多智能体系统通信带宽和计算资源带来挑战. 本节将证明所设计的事件触发通信协议(8)不存在芝诺现象.
定理 2. 如果假设1和假设2成立, 事件触发通信机制(8)可以避免芝诺现象的发生.
证明. 在触发间隔$ [t_k^i,\;t_{k+1}^i] $内, $ K e_i(t) $的右上迪尼导数$ \text{D}^+ \Vert K e_i(t)\Vert $可以表示为
$$ \begin{split} \text{D}^+ \Vert K e_i(t) \Vert& \leq \Vert K \dot e_i(t) \Vert = \Vert K \dot x_i(t) \Vert\leq \\& \Vert KA x_i(t)+KB u_i ^F(t) \Vert\leq\\ & \Vert A \Vert \Vert K e_i(t) \Vert+\Vert K A x_i(t_k^i)\Vert\; +\\&\Vert KB u_i ^F(t)\Vert \end{split} $$ (37) 其中, $ K = B^{\text{T}}P $, 令$ \Upsilon = \Vert K Ax_i(t_k^i)\Vert +\Vert KBu_i ^F(t)\Vert $
$$ \begin{split} \Vert K e_i(t) \Vert \leq \frac{\Upsilon}{\Vert A \Vert}(\text{e}^{\Vert A \Vert(t-t_k^i)}-1) \end{split} $$ (38) 根据事件触发条件(8), 可以得到
$$ \begin{split} &\omega_i\xi^{\text{T}}_i(t_k^i) PB\Xi B^{\text{T}}P\xi_i(t_k^i)\;-\\&\qquad\kappa \gamma e^{\text{T}}_i(t)PBB^{\text{T}}Pe_i(t)+\frac{1}{\varphi_i}\eta_i(t)> 0 \end{split} $$ (39) 其中, $ \Xi = {\boldsymbol{I}}_n+\hat{\Lambda}_i(t) $.
当事件触发条件$ f_i(e_i(t),\xi_i(t_k^i),\eta_i(t))\leq0 $满足时, 以下条件成立
$$ \begin{split} &\omega_i\xi^{\text{T}}_i(t_k^i) PB\Xi B^{\text{T}}P\xi_i(t_k^i)\;-\\&\qquad\kappa \gamma e^{\text{T}}_i(t)PBB^{\text{T}}Pe_i(t)+\frac{1}{\varphi_i}\eta_i(t) \leq 0 \end{split} $$ (40) $$ \begin{split} &\omega_i\xi^{\text{T}}_i(t_k^i) PB\Xi B^{\text{T}}P\xi_i(t_k^i)+\frac{1}{\varphi_i}\eta_i(t) \leq \\ &\qquad\kappa \gamma e^{\text{T}}_i(t)PBB^{\text{T}}Pe_i(t) \end{split} $$ (41) $$ \begin{split} \Vert K e_i(t) \Vert \geq \sqrt{\frac{ \omega_i\xi^{\text{T}}_i(t_k^i) PB\Xi B^{\text{T}}P\xi_i(t_k^i)+\frac{1}{\varphi_i}\eta_i(t)}{\kappa \gamma}} \end{split} $$ (42) 因此, 可以得到
$$ \begin{split} &\frac{\Upsilon}{\Vert A \Vert}(\text{e}^{\Vert A \Vert(t-t_k^i)}-1) \geq\\&\qquad \sqrt{\frac{ \omega_i\xi^{\text{T}}_i(t_k^i) PB\Xi B^{\text{T}}P\xi_i(t_k^i)+\frac{1}{\varphi_i}\eta_i(t)}{\kappa \gamma}} \end{split} $$ (43) $$ \begin{split} &\text{e}^{\Vert A \Vert(t-t_k^i)}-1\geq \\&\qquad\frac{\Vert A \Vert}{\Upsilon} \sqrt{\frac{ \omega_i\xi^{\text{T}}_i(t_k^i) PB\Xi B^{\text{T}}P\xi_i(t_k^i)+\frac{1}{\varphi_i}\eta_i(t)}{\kappa \gamma}} \end{split} $$ (44) $$ \begin{split} & t-t_k^i\geq \frac {1}{\Vert A \Vert} \;\times\\&\ln \left( \frac{\Vert A \Vert}{\Upsilon} {\sqrt{\frac{ \omega_i\xi^{\text{T}}_i(t_k^i) PB\Xi B^{\text{T}}P\xi_i(t_k^i)+\frac{1}{\varphi_i}\eta_i(t)}{\kappa \gamma}}+1}\right) \end{split} $$ (45) □ 至此, 证明了所设计的事件触发通信机制可以排除芝诺现象. 在第3节中, 将在无人船集群系统中验证所提方法的有效性.
注 7. 相较于文献[41], 通过引入$ \Gamma $和$ \vartheta_i \text{e}^{-\digamma_it} $, 所设计的动态函数$ \eta_i(t) $衰减速率更慢, 可进一步延长触发间隔, 并且设计的动态函数$ \eta_i(t) $以指数形式收敛至零.
注 8. 值得一提的是, 当智能体发生较为严重的执行器故障时, $ \kappa $将变大且$ \omega_i $将变小, 触发条件$ f_i(e_i(t),\;\xi_i(t_k^i),\;\eta_i(t))\leq0 $会更容易满足, 智能体间的通信会更频繁.
3. 仿真结果
在本节中, 将通过仿真验证所提方法可以满足预期要求. 随着无人船的大量应用, 无人船集群控制得到了广泛关注. 本文将文献[42]的无人船模型进行线性化, 该模型由六个状态组成: 纵荡位置、横荡位置、偏航角、纵荡速度、横荡速度和偏航速率, 该多智能体系统由五个相同的智能体构成. 系统矩阵$ A $和$ B $如下式
$$ A = \left[ { \begin{array}{cc} A1 & A2 \\ A3 & A4 \end{array} } \right] $$ $$ \begin{split} B=\left[ {\begin{array}{ccc} 0 & 0 & 0\\ 0 & 0 & 0\\ 0 & 0& 0\\ 0.250\,0 & 0 & 0\\ 0 & 0.339\,6 & -0.377\,4 \\ 0 & 0.377\,4 &\; \;\;2.641\,5 \end{array} } \right] \end{split} $$ (46) 其中
$$ \begin{split} A1 = \left[ { \begin{array}{ccc} 0 & 0 & 0 \\ 0 & 0 & 0\\ 0 & 0 & 0 \end{array} } \right],\;\; A2 = \left[ { \begin{array}{ccc} 1 &0& 0\\ 0&1&0\\ 0&0&1 \end{array} } \right] \end{split} $$ $$ \begin{split} A3 = \left[ { \begin{array}{ccc} -0.020\,0 & 0 & 0 \\ 0 &-0.034\,0&\;\;\;0.037\,7\\ 0&\;\;\;0.037\,7&-0.264\,2 \end{array} } \right] \end{split}$$ $$ \begin{split} A4 = \left[ { \begin{array}{ccc} -0.125\,0&0&0 \\ 0& -0.135\,8&\;\;\;0.169\,8\\ 0&\;\;\;0.150\,9&-1.188\,7 \end{array} } \right] \end{split} $$ 考虑如图1所示的由五个智能体组成的多智能体系统, 系统的拉普拉斯矩阵$ L $如下
$$ L = \left[ \begin{array}{*{20}{r}} 3 & -1 & 0 & -1& -1 \\ -1 & 1 & 0 & 0& 0 \\ 0 & 0 & 1 & -1& 0\\ -1& 0 & -1 &3 & -1\\ -1& 0 & 0 & -1 &2 \end{array} \right]$$ (47) 多智能体系统的故障参数$ \rho_{ij} $为
$$ \begin{split} \Lambda_1 = \text{diag}\{ 0.66,\;0.68,\;0.74 \}\\ \nonumber \Lambda_2 = \text{diag}\{0.62,\;0.76,\;0.69 \}\\ \Lambda_3 = \text{diag}\{ 0.73,\;0.56 ,\;0.72 \}\\ \Lambda_4 = \text{diag}\{0.67,\;0.33,\;0.64 \}\\ \Lambda_5 = \text{diag}\{0.55,\;0.45,\;0.67 \} \end{split} $$ 动态变量$ \eta_i(t) $的初值为
$$ \begin{split} \eta_i(t) = (0.055,\;0.043,\;0.034,\;0.047 ,\;0.051) \nonumber \end{split} $$ 通过求解线性矩阵不等式(31), 可以得到如下矩阵
$$ \begin{split} P = \left[ { \begin{array}{cc} P1 & P2 \\ P3 & P4 \end{array} } \right] \end{split} $$ (48) 其中
$$ \begin{split} & P1 = \left[ {\begin{array}{ccc} 0.003\,5 & 0 & 0 \\ 0 & \;\;\;0.003\,7 & -0.001\,9 \\ 0 & -0.001\,9 &\;\;\; 0.015\,8 \\ \end{array} } \right] \\ & P2 = \left[ {\begin{array}{ccc} 0.003\,7 & 0 & 0\\ 0 & \;\;\;0.002\,9 & -0.002\,0\\ 0 & -0.001\,2 &\;\;\; 0.015\,2\\ \end{array} } \right] \\ & P3 = \left[ {\begin{array}{ccc} 0.003\,7 & 0 & 0 \\ 0 &\;\;\; 0.002\,9 & -0.001\,2 \\ 0 & -0.002\,0 &\;\;\; 0.015\,2 \end{array} } \right] \\ & P4 = \left[ {\begin{array}{ccc} 0.146\,2 & 0 & 0\\ 0 & \;\;\;0.110\,7 & -0.000\,4\\ 0 & -0.000\,4 & \;\;\;0.122\,9 \end{array} } \right] \end{split} $$ 如图2 ~ 图7所示, 当多智能体系统发生执行器故障时, 自适应容错控制器可以保证多智能体系统的稳定性. 图8表示编队中无人船的纵荡位置和横荡位置, 仿真结果表明本文的容错控制方法可以使无人船集群很好地实现一致性.
从图9和图10可以看出, 如果智能体之间的状态差异过大, 智能体间的通信会更加频繁. 因此在实现一致性的过程中, 智能体之间需要频繁的通信. 当多智能体系统逐渐达成一致时, 智能体之间的通信频率不断降低, 所设计的事件触发通信机制减少了不必要的通信. 为说明本文所提事件触发机制具有更好的应用效果, 将文献[25]所提事件触发控制方法应用于本例中的无人船编队系统, 相应的事件触发时刻与触发间隔仿真效果如图10所示. 对比图9和图10可以看出, 本文所提方法能够更好地节省通信资源.
 图 9 基于触发通信协议(8)的触发时刻和触发间隔, (a)、(b)、(c)、(d) 和(e)分别表示智能体1、智能体2、智能体3、智能体4和智能体5的触发时刻和触发间隔Fig. 9 Triggering moment and triggering interval for each agent by communication protocol (8), where (a), (b), (c), (d) and (e) indicate the triggering moment and triggering interval of the agent 1, agent 2, agent 3, agent 4 and agent 5 respectively
图 9 基于触发通信协议(8)的触发时刻和触发间隔, (a)、(b)、(c)、(d) 和(e)分别表示智能体1、智能体2、智能体3、智能体4和智能体5的触发时刻和触发间隔Fig. 9 Triggering moment and triggering interval for each agent by communication protocol (8), where (a), (b), (c), (d) and (e) indicate the triggering moment and triggering interval of the agent 1, agent 2, agent 3, agent 4 and agent 5 respectively 图 10 基于文献[25]的触发时刻和触发间隔, (a)、(b)、(c)、(d) 和(e)分别表示智能体1、智能体2、智能体3、智能体4和智能体5的触发时刻和触发间隔Fig. 10 Triggering moment and triggering interval for each agent in reference [25], where (a), (b), (c), (d) and (e) indicate the triggering moment and triggering interval of the agent 1, agent 2, agent 3, agent 4 and agent 5 respectively
图 10 基于文献[25]的触发时刻和触发间隔, (a)、(b)、(c)、(d) 和(e)分别表示智能体1、智能体2、智能体3、智能体4和智能体5的触发时刻和触发间隔Fig. 10 Triggering moment and triggering interval for each agent in reference [25], where (a), (b), (c), (d) and (e) indicate the triggering moment and triggering interval of the agent 1, agent 2, agent 3, agent 4 and agent 5 respectively自适应参数$ \hat{\rho}_{ij} $和动态变量$ \eta_i(t) $如图11和图12所示. 当多智能体系统趋于一致时, 自适应参数$ \hat{\rho}_{ij} $趋于稳定, 动态变量$ \eta_i(t) $渐进收敛. 当智能体发生执行器故障时, 自适应参数$ \hat{\rho}_{ij} $可以补偿故障, 因此多智能体系统具有更好的控制性能.
仿真结果表明, 在执行器发生故障的情况下, 控制器(6)可以保证多智能体系统的稳定性和一致性. 此外, 触发通信协议(8)可以有效地降低智能体之间的通信频率.
4. 结束语
本文研究基于事件触发通信机制的多智能体系统可靠控制问题. 通过设计新的自适应事件触发通信条件, 可以有效地减少智能体之间的通信频率. 基于该触发通信机制, 所设计的控制器避免了对于邻居实时状态信息的依赖. 此外, 该控制器具有通信间隔内时变的特点, 能保证在执行器失效故障和非连续通信条件下多智能体系统的一致性和稳定性. 最后, 通过仿真验证所提出的方法可以满足设计要求. 由于考虑的故障类型为线性多智能体系统执行器失效故障, 具有一定的局限性. 未来将面向执行器卡死、偏移故障和异构多智能体系统开展基于事件触发通信的容错控制研究.
-
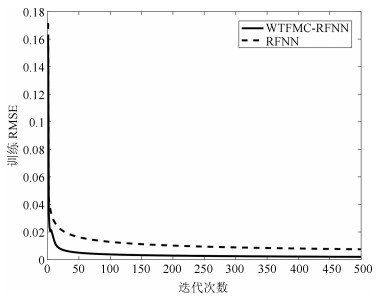
图 2 Henon混沌系统训练样本RMSE
Fig. 2 RMSE values in the training process of the Henon chaotic system
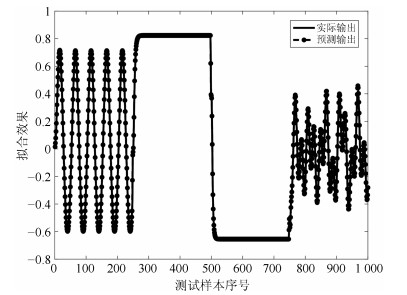
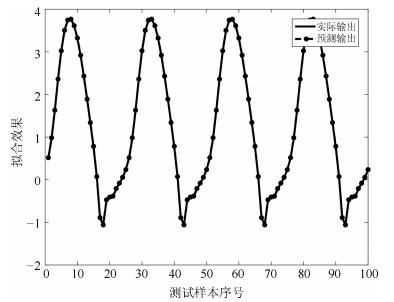
图 3 Henon混沌系统测试样本拟合效果
Fig. 3 Desired and predicted outputs of the Henon chaotic system

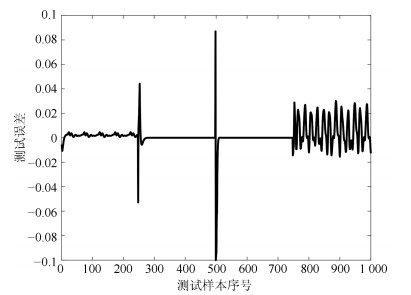
图 4 Henon混沌系统测试样本的预测误差
Fig. 4 Prediction error in the testing process of the Henon chaotic system

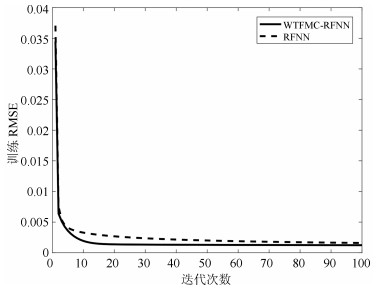
图 8 Mackey-Glass时间序列训练样本RMSE
Fig. 8 RMSE values in the training process of Mackey-Glass time series
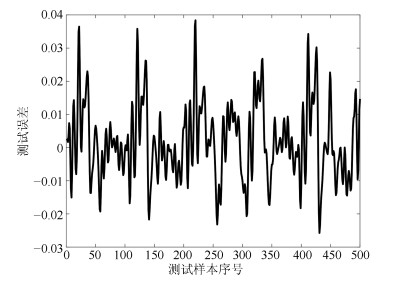
图 10 Mackey-Glass时间序列测试样本的预测误差
Fig. 10 Prediction error in the testing process of Mackey-Glass time series

图 13 非线性系统测试样本的预测误差
Fig. 13 Prediction error in the testing process of nonlinear system
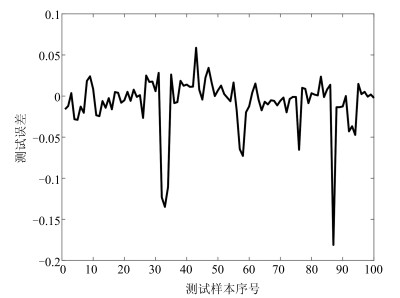
图 16 出水氨氮测试样本的预测误差
Fig. 16 Prediction error in the testing process of effluent NH$_4$-N
表 1 不同网络对Henon混沌时间序列的预测结果
Table 1 Prediction results of Henon chaotic time series with different networks
 下载: 导出CSV
下载: 导出CSV
表 3 不同网络对Mackey-Glass时间序列的预测结果
Table 3 Prediction results of Mackey-Glass time series with different networks
下载: 导出CSV
表 4 不同网络对非线性系统的预测结果
Table 4 Prediction results of nonlinear system identification with different networks
下载: 导出CSV
表 5 不同网络对出水氨氮的预测结果
Table 5 Prediction results of effluent NH$_4$-N with different networks with different networks
网络 规则数 训练RMSE 测试RMSE WTFMC-RFNN 12 0.0041 0.0351 IRSFNN (TSK) 16 0.0052 0.0468 RSEFNN-LF 12 0.0048 0.0404 TRFN-S 14 0.0045 0.0394 WRFNN 15 0.0053 0.0529 HO-RNFS 15 0.0047 0.0458 RFNN 12 0.0041 0.0437
下载: 导出CSV
-
[1] Shihabudheen K V, Pillai G N. Recent advances in neuro-fuzzy system:a survey. Knowledge-Based Systems, 2018, 152: 136-162 doi: 10.1016/j.knosys.2018.04.014 [2] Wang J J. A new type of fuzzy membership function designed for interval type-2 fuzzy neural network. Acta Automatica Sinica, 2017, 43(8): 1425-1433 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdhxb201708014 [3] Ebadzadeh M M, Salimibadr A. IC-FNN: A novel fuzzy neural network with interpretable intuitive and correlated-contours fuzzy rules for function approximation. IEEE Transactions on Fuzzy Systems, 2018, 26(3): 1288-1302 doi: 10.1109/TFUZZ.2017.2718497 [4] Tang J J, Liu F, Zhang W H, Ke R M, Zou Y J. Lane-changes prediction based on adaptive fuzzy neural network. Expert Systems with Applications, 2018, 91: 452-463 doi: 10.1016/j.eswa.2017.09.025 [5] Qiao J F, Cai J, Han H G, Cai J X. Predicting PM2.5 concentrations at a regional background station using second order self-organizing fuzzy neural network. Atmosphere, 2017, 8(12): 10-26 doi: 10.3390/atmos8010010 [6] Premkumar K, Manikandan B V, Kumar C A. Antlion algorithm optimized fuzzy PID supervised on-line recurrent fuzzy neural network based controller for brushless DC motor. Electric Power Components and Systems, 2017, 45(20): 2304-2317 doi: 10.1080/15325008.2017.1402395 [7] Zhu Q D, Yu H, Cai C T, Xiao Y. Robust optimal navigation using nonlinear model predictive control method combined with recurrent fuzzy neural network. Mathematical Problems in Engineering, 2018, 2018: 1-19 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fbcd788ee3726c5ee9168a9b36271452 [8] El-sousy F F M. Adaptive hybrid control system using a recurrent RBFN-based self-evolving fuzzy-neural-network for PMSM servo drives. Applied Soft Computing, 2014, 21(8): 509-532 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0d4fc69ba07453caac6b4cc5ad1850b0 [9] Xue A, Peng D, Guo Y. Modeling of pH neutralization process using fuzzy recurrent neural network and DNA based NSGA-Ⅱ. Journal of the Franklin Institute, 2014, 351(7): 3847-3864 doi: 10.1016/j.jfranklin.2013.03.014 [10] Pratama M, Lu J, Lughofer E. An incremental learning of concept drifts using evolving type-2 recurrent fuzzy neural networks. IEEE Transactions on Fuzzy Systems, 2017, 25(5): 1175-1192 doi: 10.1109/TFUZZ.2016.2599855 [11] Han S I, Lee J M. Recurrent fuzzy neural network backstepping control for the prescribed output tracking performance of nonlinear dynamic systems. ISA Transactions, 2014, 53(1): 33-43 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=9e529f262e1341efe49530c467cd74c7 [12] Juang C F, Hsieh C D. A Locally Recurrent fuzzy neural network with support vector regression for dynamic-system modeling. IEEE Transactions on Fuzzy Systems, 2010, 18(2): 261-273 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=90839892df2adf02ac77881e12a73ba6 [13] Wai R J, Lin Y W. Adaptive moving-target tracking xontrol of a vision-based mobile robot via a dynamic petri recurrent fuzzy neural network. IEEE Transactions on Fuzzy Systems, 2013, 21(4): 688-701 doi: 10.1109/TFUZZ.2012.2227974 [14] Lin F J, Shyu K K, Wai R J. Recurrent-fuzzy-neural-network sliding-mode controlled motor-toggle servome-chanism. IEEE/ASME Transactions on Mechatronics, 2010, 6(4): 453-466 http://ieeexplore.ieee.org/document/974859 [15] Wu G D, Zhu Z W. An enhanced discriminability recurrent fuzzy neural network for temporal classification problems. Fuzzy Sets and Systems, 2014, 237(2): 47-62 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a602f825b73d4d2f559367279b270377 [16] Qiao J F, Han G T, Han H G. Wastewater treatment control method based on a rule adaptive recurrent fuzzy neural network. International Journal of Intelligent Computing and Cybernetics, 2017, 10(2): 94-110. doi: 10.1108/IJICC-12-2016-0069 [17] Jang J S R. ANFIS: Adaptive-network-based fuzzy inference system. IEEE Transactions on Vehicular Technology, 1993, 23(3): 665-685 http://psycnet.apa.org/psycinfo/1994-15814-001 [18] Zhang Y, Xiong R, He H, Pecht M G. Long short-term memory recurrent neural network for remaining useful life prediction of lithium-ion batteries. IEEE Transactions on Vehicular Technology, 2018, 67(7): 5695-5705 doi: 10.1109/TVT.2018.2805189 [19] Kam H J, Jin O S, Park R W. Prediction of daily patient numbers for a regional emergency medical center using time series analysis. Healthcare Informatics Research, 2010, 16(3): 158-165 doi: 10.4258/hir.2010.16.3.158 [20] Joo T W, Kim S B. Time series forecasting based on wavelet filtering. Expert Systems with Applications, 2015, 42(8): 3868-3874 doi: 10.1016/j.eswa.2015.01.026 [21] Sun W, Xu Y. Research on China's energy supply and demand using an improved Grey-Markov chain model based on wavelet transform. Energy, 2017, 118: 969-984 doi: 10.1016/j.energy.2016.10.120 [22] 薛婷, 钟麦英.基于SWT与等价空间的LDTV系统故障检测.自动化学报, 2017, 43(11): 1920-1930 doi: 10.16383/j.aas.2017.c160479Xue Ting, Zhong Mai-Ying. SWT and parity space based fault detection for linear discrete time-varying systems. Acta Automatica Sinica, 2017, 43(11): 1920-1930 doi: 10.16383/j.aas.2017.c160479 [23] Bardenet R, Doucet A, Holmes C. On Markov chain Monte Carlo methods for tall data. The Journal of Machine Learning Research, 2017, 18(1): 1515-1557 http://www.oalib.com/paper/4116218 [24] 张熙来, 赵俭辉, 蔡波.针对PM2.5单时间序列数据的动态调整预测模型.自动化学报, 2018, 44(10): 1790-1798 doi: 10.16383/j.aas.2017.c170026Zhang Xi-Lai, Zhao Jian-Hui, Cai Bo. Prediction model with dynamic adjustment for single time series of PM2.5. Acta Automatica Sinica, 2018, 44(10): 1790-1798 doi: 10.16383/j.aas.2017.c170026 [25] 周杉杉, 李文静, 乔俊飞.基于自组织递归模糊神经网络的PM2.5浓度预测.智能系统学报, 2018, 13(4): 509-516 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xdkjyc201804003Zhou Shan-Shan, Li Wen-Jing, Qiao Jun-Fei. Prediction of PM2.5 concentration based on self-organizing recurrent fuzzy neural network. CAAI Transactions on Intelligent Systems, 2018, 13(4): 509-516 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xdkjyc201804003 [26] Lin Y Y, Chang J Y, Lin C T. Identification and prediction of dynamic systems using an interactively recurrent self-evolving fuzzy neural network. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24(2): 310-321 doi: 10.1109/TNNLS.2012.2231436 [27] Juang C F, Lin Y Y, Tu C C. A recurrent self-evolving fuzzy neural network with local feedbacks and its application to dynamic system processing. Fuzzy Sets and Systems, 2010, 161(19): 2552-2568 doi: 10.1016/j.fss.2010.04.006 [28] Juang C F. A TSK-type recurrent fuzzy network for dynamic systems processing by neural network and genetic algorithms. IEEE Transactions on Fuzzy Systems, 2002, 10(2): 155-170 doi: 10.1109/91.995118 [29] Lin C J, Chin C C. Prediction and identification using wavelet-based recurrent fuzzy neural networks. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2004, 34(5): 2144-2154 doi: 10.1109/TSMCB.2004.833330 [30] Juang C F, Lin C T. A recurrent self-organizing neural fuzzy inference network. IEEE Transactions on Neural Networks, 1999, 10(4): 828-845 doi: 10.1109/72.774232 [31] Theocharis J B. A high-order recurrent neuro-fuzzy system with internal dynamics:application to the adaptive noise cancellation. Fuzzy Sets and Systems, 2006, 157(4): 471-500 doi: 10.1016/j.fss.2005.07.008 [32] Mastorocostas P A, Theocharis J B. A recurrent fuzzy-neural model for dynamic system identification. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2002, 32(2): 176-190 doi: 10.1109/3477.990874 [33] Lin C J, Chen C H, Lin C T. A hybrid of cooperative particle swarm optimization and cultural algorithm for neural fuzzy networks and its prediction applications. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews), 2009, 39(1): 55-68 doi: 10.1109/TSMCC.2008.2002333 [34] Wang N, Er M J, Meng X. A fast and accurate online self-organizing scheme for parsimonious fuzzy neural networks. Neurocomputing, 2009, 72(16-18): 3818-3829 doi: 10.1016/j.neucom.2009.05.006 [35] Wu S, Er M J. Dynamic fuzzy neural networks-a novel approach to function approximation. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2000, 30(2): 358-364 doi: 10.1109/3477.836384 [36] Wu S, Er M J, Gao Y. A fast approach for automatic generation of fuzzy rules by generalized dynamic fuzzy neural networks. IEEE Transactions on Fuzzy Systems, 2001, 9(4): 578-594 doi: 10.1109/91.940970 期刊类型引用(6)
1. 傅卫沁,刘彬,徐长瑜. 基于多传感器的工业机械臂精细化操作远程控制方法. 机械与电子. 2023(05): 62-66+71 .  百度学术
百度学术2. 张玉泽,姚立忠,罗海军. 基于量子加权最小门限单元网络的出水COD预测. 环境工程技术学报. 2023(05): 1857-1864 . 百度学术3. 李文静,李治港,乔俊飞. 基于突触巩固机制的前馈小世界神经网络设计. 自动化学报. 2023(10): 2145-2158 . 本站查看4. 陈雨点. 模糊神经网络理论下的外贸出口量预测模型. 现代商业. 2022(17): 60-62 . 百度学术5. 丁海旭 ,汤健 ,夏恒 ,乔俊飞 . 基于TS-FNN的城市固废焚烧过程MIMO被控对象建模. 控制理论与应用. 2022(08): 1529-1540 . 百度学术6. 李浩楠,刘勇. 模糊神经网络的优化及其应用. 哈尔滨理工大学学报. 2020(06): 142-149 . 百度学术其他类型引用(12)
-


 下载:
下载:












计量
- 文章访问数: 1203
- HTML全文浏览量: 250
- PDF下载量: 172
- 被引次数: 18
