

-
摘要: 对于现代复杂控制系统, 微小故障往往很难发现. 在系统过程干扰和测量噪声未知但有界的前提下, 提出了一种新的基于状态集员估计的主动故障检测方法. 首先设计全对称多胞形卡尔曼滤波器对系统状态进行估计, 并利用全对称多胞形对受未知干扰影响的状态集合进行描述, 然后设计辅助输入信号使得加入辅助输入信号后正常模型的状态集合与故障模型的状态集合交集为空, 从而实现主动故障检测. 为了使得所设计的辅助输入信号对原系统影响最小, 需要求得最小的辅助输入信号, 本文将最优化问题转化为混合整数二次规划问题进行求解. 最后, 与基于输出集合的辅助输入信号设计方法对比, 仿真验证本文所提出的基于状态集合的主动故障检测方法由于未受下一时刻测量噪声的影响, 所求得的辅助输入信号更小, 保守性更低.Abstract: For modern complex systems, incipient faults is usually difficult to be detected. Under the assumption that system process disturbance and measurement noise are unknown but bounded, this paper proposes a novel active fault detection method based on state set-membership estimation. First, a zonotopic Kalman filter is designed to estimation systems states, and the state sets affected by the unknown inputs are described by zonotopes. Then, an auxiliary input signal is designed such that the state sets of the normal model are separated from the ones of faulty models, as a result, incipient faults are detected successfully. In order to decrease the effect of the auxiliary input to the practical systems, the minimum auxiliary input signal is required. In this paper, the optimization problem is transformed into a mixed integer quadratic programming problem. Compared with the output sets based auxiliary input signal design method, the proposed technique can achieve a smaller auxiliary input signal because of states set are not affect by the measurement noise at the next time instant, and it has less conservatism.
-
Key words:
- Active fault detection /
- state set-membership estimation /
- auxiliary input signal /
- zonotope /
- incipient fault
1) 本文责任编委 辛景民 -
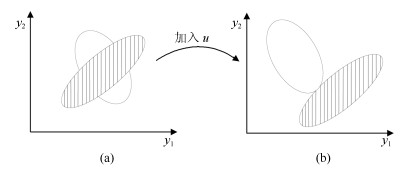
图 1 在正常模型和故障模型下, 加入辅助信号与未加辅助信号结果的对比
Fig. 1 Comparison of the results of adding auxiliary signals and unassisted signals under normal and fault models
图 2 在正常模型和故障模型下, 加入辅助信号对状态和输出的影响
Fig. 2 The effect of adding an auxiliary signal on state and output under normal and fault models
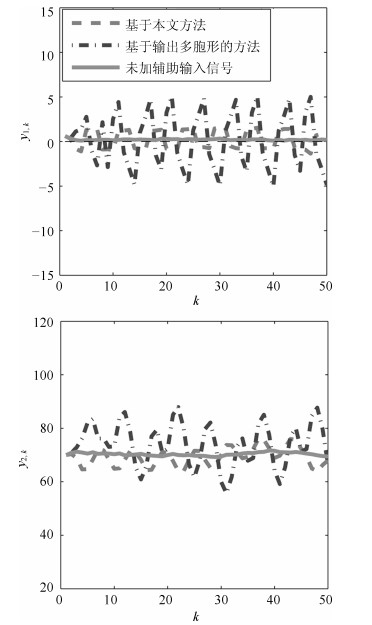
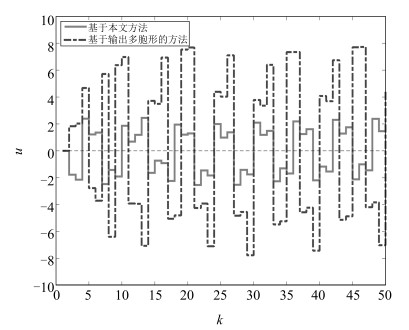
图 4 加入辅助信号和未加辅助信号对系统输出的影响
Fig. 4 Effect of adding auxiliary signal and unassisted signal on system output
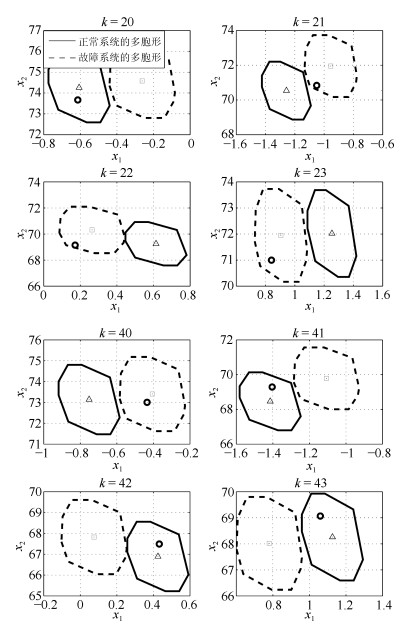
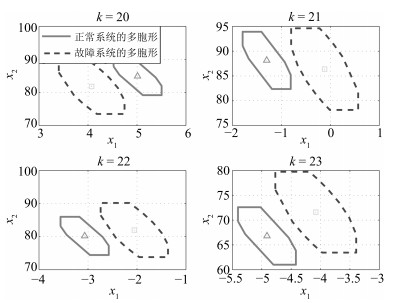
图 5 状态多胞形: 通过状态交集为空的方法
Fig. 5 Zonotope of the system state: the method of emptying the state intersection

图 7 输出多胞形: 通过输出交集为空的方法
Fig. 7 Zonotope of the system output: the method of emptying the output intersection
-
[1] Precup R E, Angelov P, Costa B S J, Sayed-Mouchaweh M. An overview on fault diagnosis and nature-inspired optimal control of industrial process applications. Computers in Industry, 2015, 74: 75-94 doi: 10.1016/j.compind.2015.03.001 [2] Monroy I, Escudero G, Graells M. Anomaly detection in batch chemical processes. Computer Aided Chemical Engineering, 2009, 26(9): 255-260 http://www.sciencedirect.com/science/article/pii/S1570794609700434 [3] Zhou M, Wang Z H, Shen Y, Shen M Q. $H_-$/${{H}}_{\infty}$ fault detection observer design in finite frequency domain for Lipschitz non-linear systems. IET Control Theory and Applications, 2017, 11(14): 2361-2369 %zhoumeng doi: 10.1049/iet-cta.2017.0357 [4] Wang Z H, Shi P, Lim C C. $H_-$/${ {H}}_{\infty}$ fault detection observer in finite frequency domain for linear parameter-varying descriptor systems. Automatica, 2017, 86: 38-45 %wangzhenhua doi: 10.1016/j.automatica.2017.08.021 [5] Han W X, Wang Z H, Shen Y, Liu Y P. ${ {H}}_{\infty}$ fault detection for linear discrete-time descriptor systems. IET Control Theory and Applications, 2018, 12(15): 2156-2163 doi: 10.1049/iet-cta.2017.1408 [6] Liu G J, Cao Y Y, Chang X H. Fault detection observer design for fuzzy systems with local nonlinear models via fuzzy Lyapunov function. International Journal of Control, Automation and Systems, 2017, 15(5): 2233-2242 doi: 10.1007/s12555-016-0496-6 [7] Zhang Q, Geng S C. Dynamic uncertain causality graph applied to dynamic fault diagnoses of large and complex systems. IEEE Transactions on Reliability, 2015, 64(3): 910- 927 doi: 10.1109/TR.2015.2416332 [8] 袁杰, 王福利, 王姝, 赵露平. 基于D-S融合的混合专家知识系统故障诊断方法. 自动化学报, 2017, 43(9): 1580-1587 doi: 10.16383/j.aas.2017.c160676Yuan Jie, Wang Fu-Li, Wang Shu, Zhao Lu-Ping. A fault diagnosis approach by D-S fusion theory and hybrid expet knowledge system. Acta Automatica Sinica, 2017, 43(9): 1580-1587 doi: 10.16383/j.aas.2017.c160676 [9] 文成林, 吕菲亚, 包哲静, 刘妹琴. 基于数据驱动的微小故障诊断方法综述. 自动化学报, 2016, 42(9): 1285-1299 doi: 10.16383/j.aas.2016.c160105Wen Cheng-Lin, Lv Fei-Ya, Bao Zhe-Jing, Liu Mei-Qin. A review of data driven-based incipient fault diagnosis. Acta Automatica Sinica, 2016, 42(9): 1285-1299 doi: 10.16383/j.aas.2016.c160105 [10] Cai B P, Zhao Y B, Liu H L, Xie M. A data-driven fault diagnosis methodology in three-phase inverters for PMSM drive systems. IEEE Transactions on Power Electronics, 2017, 32(7): 5590-5600 doi: 10.1109/TPEL.2016.2608842 [11] 刘强, 卓洁, 郎自强, 秦泗钊. 数据驱动的工业过程运行监控与自优化研究展望. 自动化学报, 2018, 44(11): 26-38 doi: 10.3969/j.issn.1003-8930.2018.11.005Liu Qiang, Zhou Jie, Lang Zi-Qiang, Qin S. Joe. Perspectives on data-driven operation monitoring and self-optimization of industrial processes. Acta Automatica Sinica, 2018, 44(11): 26-38 doi: 10.3969/j.issn.1003-8930.2018.11.005 [12] 李娟, 周东华, 司小胜, 陈茂银, 徐春红. 微小故障诊断方法综述. 控制理论与应用, 2012, 29(12): 1517-1529 https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201212000.htmLi Juan, Zhou Dong-Hua, Si Xiao-Sheng, Chen Mao-Yin, Xu Chun-Hong. Review of incipient fault diagnosis methods. Control Theory and Applications, 2012, 29(12): 1517-1529 https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201212000.htm [13] Simandal M, Puncochar I. Active fault detection and control: unified formulation and optimal design. Automatica, 2009, 45(9): 2052-2059 doi: 10.1016/j.automatica.2009.04.028 [14] Ashari A E, Nikoukhah R, Campbell S L. Auxiliary signal design for robust active fault detection of linear discrete-time systems. Automatica, 2011, 47(9): 1887-1895 doi: 10.1016/j.automatica.2011.06.009 [15] Puncochar I, Skach J. A survey of active fault diagnosis methods. IFAC Papers OnLine, 2018, 51(54): 1091-1098 [16] Wang J, Zhang J J, Qu B, Wu H Y, Zhou J L. Unified architecture of active fault detection and partial active fault-tolerant control for incipient faults. IEEE Transactions on Systems, Man, and Cybernetics Systems , 2017, 47(7): 1688 -1699 doi: 10.1109/TSMC.2017.2667683 [17] Niemann H, Poulsen N K. Active fault detection in MIMO systems. In: Proceedings of the 2014 IEEE American Control Conference. Portland, Oregon, USA: IEEE, 2014. 1975- 1980 [18] Niemann H, Poulsen N K. Active fault diagnosis in closed-loop uncertain systems. IFAC Proceedings Volumes, 2006, 39(13): 587-592 doi: 10.3182/20060829-4-CN-2909.00097 [19] Mesbah A, Streif S, Findeisen R, Braatz R D. Active fault diagnosis for nonlinear systems with probabilistic uncertainties. IFAC Proceedings Volumes, 2014, 47(3): 7079-7084 doi: 10.3182/20140824-6-ZA-1003.01594 [20] Bertsekas D P, Rhodes I B. Recursive state estimation for a set-membership description of uncertainty. IEEE Transactions on Automatic Control, 1971, 16(2): 117-128 doi: 10.1109/TAC.1971.1099674 [21] 汤文涛, 王振华, 王烨, 沈毅. 基于未知输入集员滤波器的不确定系统故障诊断. 自动化学报, 2018, 44(9): 1717-1724 doi: 10.16383/j.aas.2017.c170123Tang Wen-Tao, Wang Zhen-Hua, Wang Ye, Shen Yi. Fault diagnosis for uncertain dystems based on unknown input set-membership filters. Acta Automatica Sinica, 2018, 44(9): 1717-1724 doi: 10.16383/j.aas.2017.c170123 [22] Campbell S L, Horton K G, Nikoukhah R. Auxiliary signal design for rapid multi-model identification using optimization. Automatica, 2002, 38(8): 1313-1325 doi: 10.1016/S0005-1098(02)00040-7 [23] Zhai S C, Wang W, Ye H. Auxiliary signal design for active fault detection based on set-membership. IFAC Papers OnLine, 2015, 48(21): 452-457 doi: 10.1016/j.ifacol.2015.09.568 [24] Raimondo D M, Marseglia G R, Braatz R D, Scott J K. Closed-loop input design for guaranteed fault diagnosis using set-valued observers, Automatica, 2016, 74: 107-117 doi: 10.1016/j.automatica.2016.07.033 [25] Scott J K, Findeisen R, Braatz R D, Raimondo D M. Input design for guaranteed fault diagnosis using zonotopes, Automatica, 2014, 50: 1580-1589 doi: 10.1016/j.automatica.2014.03.016 [26] Scott J K, Findeisen R, Braatz R D, Raimondo D M. Design of active inputs for set-based fault diagnosis. In: Proceedings of the 2013 IEEE American Control Conference. Washington, DC, USA: IEEE, 2013. 3561-3566 [27] Kuhn W. Rigorously computed orbits of dynamical systems without the wrapping effect. Computing, 1998, 61(1): 47- 67 doi: 10.1007/BF02684450 [28] Wang Y, Puig V. Zonotopic extended Kalman filter and fault detection of discrete-time nonlinear systems applied to a quadrotor helicopter. In: Proceedings of the 2016 IEEE Control and Fault-Tolerant Systems, Barcelona, Spain: IEEE, 2016. 367-372 [29] Combastel C. A state bounding observer for uncertain non-linear continuous-time systems based on zonotopes. In: Proceedings of the 2005 IEEE Conference on Decision and Control and the European Control Conference, Seville, Spain: IEEE, 2005. 7228-7234 [30] Combastel C. Zonotopes and Kalman observers: Gain optimality under distinct uncertainty paradigms and robust convergence. Automatica, 2015, 55: 265-273 doi: 10.1016/j.automatica.2015.03.008 [31] Bertsekas D P. Nonlinear Programming. Belmont, MA: Athena Scientific, 1999. 314-360 -

 下载:
下载:

计量
- 文章访问数: 2171
- HTML全文浏览量: 212
- PDF下载量: 343
- 被引次数: 0
