

Adaptive Decentralized Tracking Control for Nonlinear Interconnected Systems With Input Quantization and Output Constraints
-
摘要: 本文考虑具有量化输入和输出约束的一类非线性互联系统的自适应分散跟踪控制设计. 分别针对量化参数已知和未知两种情况, 基于反推(Backstepping)设计法, 利用神经网络逼近特性, 设计自适应分散跟踪控制策略. 通过定义新的未知常量和非线性光滑函数, 设计自适应参数估计项来消除未知互联项对系统的影响. 进一步考虑量化参数未知的情形, 引入一个新的不等式来转化输入信号, 并构建新的自适应补偿项来处理量化影响. 同时, 障碍李雅普诺夫函数的引入, 确保了系统输出不违反约束条件. 与现有量化输入设计相比, 本文所提方法不要求未知非线性项满足李普希兹条件, 并且允许量化参数未知. 该设计方法保证了闭环系统所有信号最终一致有界, 而且跟踪误差能够收敛到原点的小邻域内, 同时保证输出不违反约束条件. 最后, 仿真算例验证了所提方法具备良好的跟踪控制性能.Abstract: This paper addresses adaptive decentralized output tracking control for a class of nonlinear interconnected systems with input quantization and out constraints. An adaptive decentralized tracking control strategy is designed based on backstepping design method and neural network approximation characteristics for the known and unknown quantization parameters respectively. By defining the new unknown constant and nonlinear smooth function, an adaptive parameter estimation term is used to offset the impact of interconnected items on system performances. Furthermore, in the case when the quantization parameters are unknown, a new inequality is introduced to transform the input signal and a new adaptive compensation term is constructed to deal with the influence of quantization. Meanwhile, the Barrier Lyapunov function is introduced to ensure outputs do not violate the constraints. Compared with existing input quantization designs, the proposed method does not require unknown nonlinear terms to satisfy Lipschitz conditions, and quantization parameters can be unknown. The proposed method ensures that all the closed-loop signals are uniformly bounded, and the tracking errors can converge to the small neighborhood of the origin, while ensuring the output do not violate the constraints. Finally, the simulation results show that the proposed method yields better tracking performance.
-
Key words:
- Interconnected systems /
- input quantization /
- output constraint /
- decentralized control /
- adaptive backstepping control /
- neural network
1) 本文责任编委 季海波 -

图 5 量化参数已知时跟踪误差$z_{1, 1}$的轨迹
Fig. 5 Trajectory of tracking error $z_{1, 1}$ with known quantization parameters
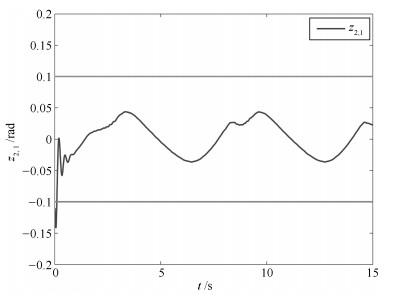
图 6 量化参数已知时跟踪误差$z_{2, 1}$的轨迹
Fig. 6 Trajectory of tracking error $z_{2, 1}$ with known quantization parameters
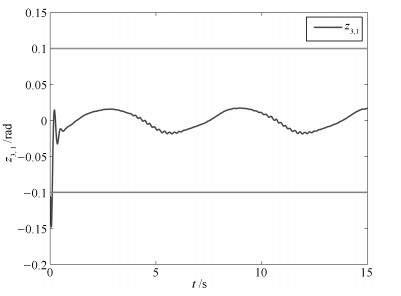
图 7 量化参数已知时跟踪误差$z_{3, 1}$的轨迹
Fig. 7 Trajectory of tracking error $z_{3, 1}$ with known quantization parameters
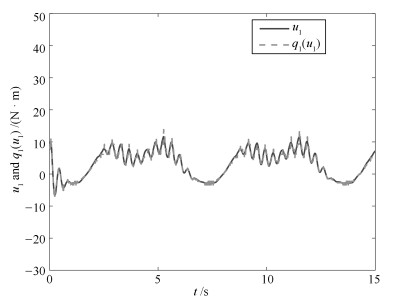
图 8 量化参数已知时输入$u_1$和$q_1(u_1)$的轨迹
Fig. 8 Trajectories of input $u_1$ and $q_1(u_1)$ with known quantization parameters
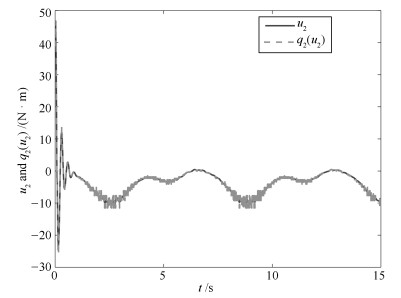
图 9 量化参数已知时输入$u_2$和$q_2(u_2)$的轨迹
Fig. 9 Trajectories of input $u_2$ and $q_2(u_2)$ with known quantization parameters

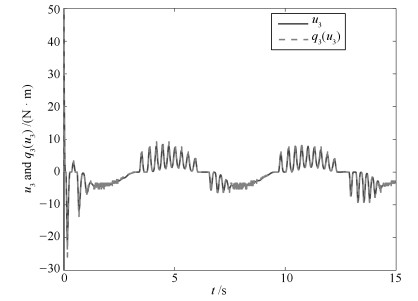
图 10 量化参数已知时输入$u_3$和$q_3(u_3)$的轨迹
Fig. 10 Trajectories of input $u_3$ and $q_3(u_3)$ with known quantization parameters

图 11 量化参数未知时跟踪误差$z_{1, 1}$的轨迹
Fig. 11 Trajectory of tracking error $z_{1, 1}$ with unknown quantization parameters

图 12 量化参数未知时跟踪误差$z_{2, 1}$的轨迹
Fig. 12 Trajectory of tracking error $z_{2, 1}$ with unknown quantization parameters

图 13 量化参数未知时跟踪误差$z_{3, 1}$的轨迹
Fig. 13 Trajectory of tracking error $z_{3, 1}$ with unknown quantization parameters
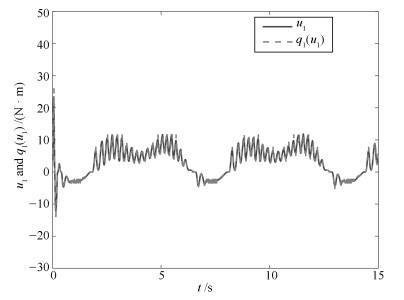
图 14 量化参数未知时输入$u_1$和$q_1(u_1)$的轨迹
Fig. 14 Trajectories of input $u_1$ and $q_1(u_1)$ with unknown quantization parameters

图 15 量化参数未知时输入$u_2$和$q_2(u_2)$的轨迹
Fig. 15 Trajectories of input $u_2$ and $q_2(u_2)$ with unknown quantization parameters
-
[1] Jain S, Khorrami F. Decentralized adaptive output feedback design for large-scale nonlinear systems. IEEE Transactions on Automatic Control, 1997, 42(5): 729-735 doi: 10.1109/9.580893 [2] Wen C Y. Decentralized adaptive regulation. IEEE Transactions on Automatic Control, 1994, 39(10): 2163-2166 doi: 10.1109/9.328806 [3] Spooner J T, Passino K M. Decentralized adaptive control of nonlinear systems using radial basis neural networks. IEEE Transactions on Automatic Control, 1999, 44(11): 2050- 2057 doi: 10.1109/9.802914 [4] Hua C C, Guan X P, Shi P. Adaptive fuzzy control for uncertain interconnected time-delay systems. Fuzzy Sets and Systems, 2005, 153(3): 447-458 doi: 10.1016/j.fss.2005.01.002 [5] Mehraeen S, Jagannathan S, Crow M L. Decentralized dynamic surface control of large-scale interconnected systems in strict-feedback form using neural networks with asymptotic stabilization. IEEE Transactions on Neural Networks, 2011, 22(11): 1709-1722 doi: 10.1109/TNN.2011.2140381 [6] Zhou Q, Shi P, Liu H H, Xu S Y. Neural-network-based decentralized adaptive output-feedback control for large-scale stochastic nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics --- Part B: Cybernetics, 2012, 42(6): 1608-1619 doi: 10.1109/TSMCB.2012.2196432 [7] Jiang Z P. Decentralized and adaptive nonlinear tracking of large-scale systems via output feedback. IEEE Transactions on Automatic Control, 2000, 45(11): 2122-2128 doi: 10.1109/9.887638 [8] Tong S C, Liu C L, Li Y M. Fuzzy adaptive decentralized control for large-scale nonlinear systems with dynamical uncertainties. IEEE Transactions on Fuzzy Systems, 2010, 18(5): 845-861 doi: 10.1109/TFUZZ.2010.2050326 [9] Zhou J, Wen C Y. Decentralized backstepping adaptive output tracking of interconnected nonlinear systems. IEEE Transactions on Automatic Control, 2008, 53(10): 2378- 2384 doi: 10.1109/TAC.2008.2007524 [10] Wang C L, Lin Y. Decentralized adaptive tracking control for a class of interconnected nonlinear time-varying systems. Automatica, 2015, 54: 16-24 doi: 10.1016/j.automatica.2015.01.041 [11] Zhou J, Wen C Y, Wang W. Adaptive control of uncertain nonlinear systems with quantized input signal. Automatica, 2018, 95: 152-162 doi: 10.1016/j.automatica.2018.05.014 [12] Wang C L, Wen C Y, Lin Y. Decentralized adaptive backstepping control for a class of interconnected nonlinear systems with unknown actuator failures. Journal of the Franklin Institute, 2015, 352(3): 835-850 doi: 10.1016/j.jfranklin.2014.11.019 [13] Liu Z, Wang F, Zhang Y, Chen C L P. Fuzzy adaptive quantized control for a class of stochastic nonlinear uncertain systems. IEEE Transactions on Cybernetics, 2016, 46(2): 524-534 doi: 10.1109/TCYB.2015.2405616 [14] Xing L T, Wen C Y, Su H Y, Cai J P, Wang L. A new adaptive control scheme for uncertain nonlinear systems with quantized input signal. Journal of the Franklin Institute, 2015, 352(12): 5599-5610 doi: 10.1016/j.jfranklin.2015.06.020 [15] Liu T, Jiang Z P, Hill D J. A sector bound approach to feedback control of nonlinear systems with state quantization. Automatica, 2012, 48(1): 145-152 doi: 10.1016/j.automatica.2011.09.041 [16] Lai G Y, Liu Z, Chen C L P, Zhang Y. Adaptive asymptotic tracking control of uncertain nonlinear system with input quantization. Systems and Control Letters, 2016, 96: 23-29 doi: 10.1016/j.sysconle.2016.06.010 [17] Tee K P, Ge S S, Tay E H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica, 2009, 45(4): 918-927 doi: 10.1016/j.automatica.2008.11.017 [18] Han S I, Lee J M. Adaptive fuzzy backstepping dynamic surface control for output-constrained non-smooth nonlinear dynamic system. International Journal of Control Automation and Systems, 2012, 10(4): 684-696 doi: 10.1007/s12555-012-0403-8 [19] He W, Zhang S, Ge S S. Adaptive control of a flexible crane system with the boundary output constraint. IEEE Transactions on Industrial Electronics, 2014, 61(8): 4126-4133 doi: 10.1109/TIE.2013.2288200 [20] Sanner R M, Slotine J E. Gaussian networks for direct adaptive control. IEEE Transactions on Neural Networks, 1992, (3): 837-863 [21] Li K W, Tong S C, Li Y M. Finite-time adaptive fuzzy decentralized control for nonstrict-feedback nonlinear systems with output-constraint. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018. DOI: 10.1109/TSMC.2018.2870698 [22] Hua C C, Zhang L L, Guan X P. Distributed adaptive neural network output tracking of leader-following high-order stochastic nonlinear multiagent systems with unknown dead-zone input. IEEE Transactions on Cybernetics, 2017, 47(1): 177-185 doi: 10.1109/TCYB.2015.2509482 [23] Yoo S J, Park J B, Choi, Y H. Decentralized adaptiv stabilization of interconnected nonlinear systems with unknown non-symmetric dead-zone inputs. Automatica, 2009, 45: 436-443 doi: 10.1016/j.automatica.2008.07.019 -

 下载:
下载:



计量
- 文章访问数: 1274
- HTML全文浏览量: 296
- PDF下载量: 252
- 被引次数: 0
