

-
摘要: 在描述实际系统的非线性和时变特性方面, 线性参数变化(Linear parameter varying, LPV)模型有着巨大的优越性, 对于使用一些成熟的线性系统控制理论来解决非线性系统的控制问题, 提供了良好的手段.文章对LPV系统的模型结构和建模方法, 模型参数辨识方法, 控制方法以及应用领域等方面的近几年的研究成果, 做了比较全面的总结和概括, 最后对LPV系统建模和控制的未来研究方向进行了展望.Abstract: Linear parameter varying (LPV) model has great advantages in describing the nonlinear and time-varying characteristics of practical systems. The LPV model can be used to solve the control problems of nonlinear systems by using some mature linear system control theories. In this paper, the research results of LPV system in recent years, such as model structure and modeling method, model parameter identification method, control method and application field, are summarized in an all-round way. Finally, the future research direction of LPV system modeling and control is prospected.
-
Key words:
- Linear parameter varying (LPV) system /
- system modeling /
- model identification /
- varying gain control /
- robust control /
- predictive control
-
在工业生产和社会生活中, 存在着大量的复杂系统, 如非线性耦合机械系统[1]、超临界机组[2]等. 这些复杂系统线性化时通常包含了不可控模态, 给其控制器设计与分析带来了挑战. 在过去十几年里, 这类称之为高阶非线性系统的自适应控制问题吸引了很多研究者的关注. Lin等在文献[3-4]中提出了一种新的构造性设计框架−增加幂次积分法, 有效解决了高阶非线性系统的镇定与实际跟踪问题. 借助于这一方法, 文献[5-19]研究了不同条件下高阶不确定非线性系统的自适应控制问题, 取得了一系列研究成果. 值得指出的是, 上述绝大多数研究结果都要求系统的幂次信息完全已知. 然而, 在一些实际应用中, 由于控制系统本身与周围环境存在着各种不确定因素, 使得系统的幂次信息可能无法精确获取. 因此, 进一步探讨具有未知幂次的高阶非线性系统的控制器设计是很有意义并值得研究的问题.
针对具有未知幂次的高阶非线性系统, 文献[20-21]采用改进的增加幂次积分法, 分别给出了状态反馈和输出反馈控制算法. 然而, 这些算法没有考虑系统函数的不确定性, 且需要假设系统的幂次上界信息已知. 文献[22]结合增加幂次积分技术和自适应控制方法, 解决了具有未知幂次和不确定参数的高阶非线性系统的自适应控制问题. 最近, 针对一类具有未知时变幂次的高阶非线性系统, 文献[23]利用障碍李雅普诺夫方法给出了满足全状态约束条件的自适应控制方案. 但文献[22-23]所提控制方案仍然要求系统幂次的上界已知. 为去除这一假设条件, 文献[24]采用增加幂次积分技术和逻辑切换方法, 设计了一种全局切换自适应镇定方案. 该方案的不足在于切换控制信号是非光滑的, 可能会引起抖振问题, 从而激发系统中的高频未建模动态. 为此, 文献[25]利用动态增益法, 提出了一种光滑自适应状态反馈控制器, 但这种控制器仅适用于相对阶为2的非线性系统.
基于以上讨论, 本文研究了一类具有未知幂次的高阶不确定非线性系统的自适应跟踪控制问题. 结合积分反推技术和障碍李雅普诺夫函数, 提出了一种新颖的自适应状态反馈控制策略. 本文所得到的控制策略具有如下优点: 1) 采用对数型障碍李雅普诺夫函数[26-27]解决了系统幂次未知与模型不确定带来的技术难题; 2) 所提出的自适应控制策略中没有包含虚拟控制律的导数信息, 避免了积分反推法中的“计算膨胀”问题; 3) 所设计控制器能够确保闭环系统的所有信号一致有界. 最后, 仿真结果验证了本文理论结果的有效性.
本文采用如下符号:
$ {\bf{R}} $ ,${\bf{R}}_{\geq{{0}}}$ ,${\bf{R}}_{ > {{0}}}$ 分别表示实数、非负实数和正实数集合.$ {{\bf{R}}}^n $ 表示$ n $ 维实向量集合.$ {\rm{sign}}(s) $ 表示变量$ s $ 的符号函数. 对任意正常数$ q $ , 定义$ [s]^q = {\rm{sign}}(s)|s|^q $ .${\bf{Q}}_{{\rm{odd}}}^{\ge 1}$ 表示分子和分母都是正奇整数的所有有理数的集合.1. 问题描述与预备知识
1.1 问题描述
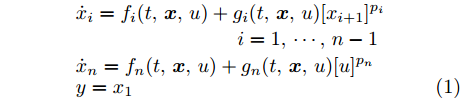
考虑如下高阶不确定非线性系统
$$ \begin{split} & \dot{x}_i = f_i(t,{\boldsymbol{x}},u)+g_i(t,{\boldsymbol{x}},u)[x_{i+1}]^{p_i}\\ &\qquad\qquad\qquad\;\;\;\;\quad i = 1,\cdots,n-1\\ &\dot{x}_n = f_n(t,{\boldsymbol{x}},u)+g_n(t,{\boldsymbol{x}},u)[u]^{p_n}\\& y = x_1 \end{split} $$ (1) 其中,
${\boldsymbol{x}} = [x_1,\cdots,x_n]^{\rm{T}}\in {{\bf{R}}}^n$ 是系统的状态向量, 初始值${\boldsymbol{x}}(0) = [x_1(0),\cdots,x_n(0)]^{\rm{T}}$ ,$\bar{{\boldsymbol{x}}}_i = [x_1,\cdots,x_i]^{\rm{T}}\in {{\bf{R}}}^i$ ,$i = 1,\cdots,n$ ;$ u \in {{\bf{R}}} $ 和$ y \in {{\bf{R}}} $ 分别是控制输入和系统输出;$ p_i\in {\bf{Q}}_{{\rm{odd}}}^{\ge 1} $ ,$i = 1,\cdots,n$ 是系统(1)的未知幂次. 系统函数$ f_i, g_i:{{\bf{R}}}_{\ge0}\times {{\bf{R}}}^n\times {{\bf{R}}}\rightarrow {{\bf{R}}} $ ,$i = 1,\cdots,n$ 在$ t $ 上分段连续, 且关于$ {\boldsymbol{x}} $ 和$ u $ 满足局部Lipschitz条件. 本文的控制目标是设计自适应控制器$ u $ , 使得系统输出$ y $ 跟踪期望轨迹$ y_r $ , 同时确保闭环系统的所有信号皆有界.注 1. 不同于文献[20-25]中的研究结果, 本文中系统幂次无需满足
$ p_1\ge p_2\ge \cdots\ge p_n $ .假设 1. 存在未知的连续函数
$\bar{f}_{il}(\bar{{\boldsymbol{x}}}_i) : {{\bf{R}}}^{i}\rightarrow {{\bf{R}}}_{\geq0}$ ,$ \underline{g}_i(\bar{{\boldsymbol{x}}}_i): {{\bf{R}}}^{i}\rightarrow {{\bf{R}}}_{>0} $ 和$ \bar{g}_i(\bar{{\boldsymbol{x}}}_i): {{\bf{R}}}^{i}\rightarrow {{\bf{R}}}_{>0} $ , 满足$$ |f_i(t,{\boldsymbol{x}},u)|\le \sum\limits_{l = 1}^{j_i}|x_{i+1}|^{q_{il}}\bar{f}_{il}(\bar{{\boldsymbol{x}}}_i) $$ (2) $$ 0<\underline{g}_i(\bar{{\boldsymbol{x}}}_i)\le g_i(t,{\boldsymbol{x}},u)\le \bar{g}_i(\bar{{\boldsymbol{x}}}_i) $$ (3) 其中,
$i = 1,\cdots,n$ ,$l = 1,\cdots,j_i$ ,$ j_i $ 为有限正整数,$ q_{il} $ 为满足$ 0\le q_{i1}<q_{i2}<\cdots<q_{ij_i}<p_i $ 的正常数.注 2. 假设1表明了本文所提控制算法无需知晓系统函数
$ g_i(t,{\boldsymbol{x}},u) $ ,$ f_i(t,{\boldsymbol{x}},u) $ 及相应的界函数$ \underline{g}_i(\bar{{\boldsymbol{x}}}_{i}) $ ,$ \bar{g}_i(\bar{{\boldsymbol{x}}}_{i}) $ ,$ \bar{f}_{il}(\bar{{\boldsymbol{x}}}_i) $ 的解析表达式.假设 2. 期望轨迹
$ y_r $ 为连续可微函数, 且存在未知正常数$ B_r $ , 满足$$ |y_r(t)|+|\dot{y}_r(t)|\le B_r,t\ge 0 $$ (4) 1.2 预备知识
引理 1[28]. 考虑初值问题
$$ \dot{\boldsymbol{\eta}}_r(t) = h_r(t,{\boldsymbol{\eta}}_r),\; {\boldsymbol{\eta}}_r(0) = {\boldsymbol{\eta}}^0_r\in \Xi_r $$ (5) 其中,
$h_r:{{\bf{R}}}_{\ge0}\times \Xi_r\rightarrow {{\bf{R}}}^{{N}}$ 在$ t $ 上分段连续, 且关于$ {\boldsymbol{\eta}}_r $ 满足局部Lipschitz条件,$\Xi_r\subset {{\bf{R}}}^{{N}}$ 为非空开子集.$ {\boldsymbol{\eta}}_r(t) $ 是初值问题(5)在最大存在区间$ [0,t'_f) $ 上的解,$ t'_f<+\infty $ . 设$ \Xi'_r $ 是$ \Xi_r $ 的紧子集, 则存在$t_s\in [0,t'_f)$ , 使得$ {\boldsymbol{\eta}}_r(t_s)\not\in\Xi'_r $ .引理 2[29]. 对任意
$ a\in {{\bf{R}}} $ ,$ b \in {{\bf{R}}} $ ,$ m\in {{\bf{R}}}_{>0} $ ,$ n\in {{\bf{R}}}_{>0} $ 和函数$ \rho(a,b)>0 $ , 下列不等式成立$$\begin{split} |a|^m|b|^n \le\;& \frac{m}{m+n}\rho(a,b)|a|^{m+n}\;+\\&\frac{n}{m+n}\rho(a,b)^{-\tfrac{m}{n}}|b|^{m+n} \end{split}$$ (6) 引理 3[29-30]. 对任意
$ p\ge 1 $ ,$ a\in {{\bf{R}}} $ ,$ b \in {{\bf{R}}} $ , 下列不等式成立$$ \|a|^{p}-|b|^{p}|\le |[a]^{p}-[b]^{p}| \hspace{37pt} $$ (7) $$ \begin{split} \,|[a]^{p}-[b]^{p}|\le\; &c_{p}|a-b|\times\\ &(|a-b|^{{p}-1}+|b|^{{p}-1}) \end{split} $$ (8) $$ |a|^{p}+|b|^{p}\le(|a|+|b|)^{p} \hspace{45pt}$$ (9) 其中,
$ c_{p} = 2^{p-2}+2 $ .引理 4[31]. 对任意
$ \delta\in {{\bf{R}}}_{>0} $ 和$ \xi \in {{\bf{R}}} $ , 下列不等式成立$$ 0\le |\xi|-\frac{\xi^2}{\sqrt{\xi^2+\delta^2}}<\delta $$ (10) 引理 5[32]. 对满足
$ 0\le d<c $ 的$ c\in {{\bf{R}}} $ 和$ d\in {{\bf{R}}} $ , 下列不等式成立$$ \log\frac{c}{c-d} \le \frac{d}{c-d} $$ (11) 2. 自适应跟踪控制策略
本节设计了一种基于障碍李雅普诺夫函数的自适应跟踪控制器, 并给出了闭环系统的稳定性证明.
2.1 自适应控制器设计
定义如下误差坐标变换
$$ z_1 = x_1-y_r $$ (12) $$ z_i = x_i-\alpha_{i-1},\;i = 2,\cdots,n $$ (13) 其中,
$ \alpha_{i-1} $ 是第$ i-1 $ 步的虚拟控制律.步骤
$ {\boldsymbol{i}} $ ${\boldsymbol{(i = 1,\cdots,n-1)}}$ . 选取正常数$ \mu_i $ 满足$ \mu_i>|z_i(0)| $ , 设计第$ i $ 步虚拟控制律和自适应律为$$ \alpha_i = -\xi_i\left(k_i+\frac{\sigma_i\hat{\vartheta}_i}{\sqrt{\xi_i^2+\delta_i^2}}\right) $$ (14) $$ \dot{\hat{\vartheta}}_i = \gamma_i\left(\frac{\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}-\lambda_i\hat{\vartheta}_i\right) $$ (15) 其中,
$\xi_i = \dfrac{z_i}{\mu_i^2-z_i^{2}}$ ,$ \hat{\vartheta}_i $ 是$ \vartheta_i $ 的估计值,$ \hat{\vartheta}_i(0)\ge 0 $ ,$ k_i $ ,$ \sigma_i $ ,$ \gamma_i $ 和$ \lambda_i $ 为正常数.步骤 n. 选取正常数
$ \mu_n $ 满足$ \mu_n>|z_n(0)| $ , 设计实际控制律和自适应律为$$ u = -\xi_n\left(k_n+\frac{\sigma_n\hat{\vartheta}_n}{\sqrt{\xi_n^2+\delta_n^2}}\right) $$ (16) $$ \dot{\hat{\vartheta}}_n = \gamma_n\left(\frac{\xi_n^2}{\sqrt{\xi_n^2+\delta_n^2}}-\lambda_n\hat{\vartheta}_n\right) $$ (17) 其中,
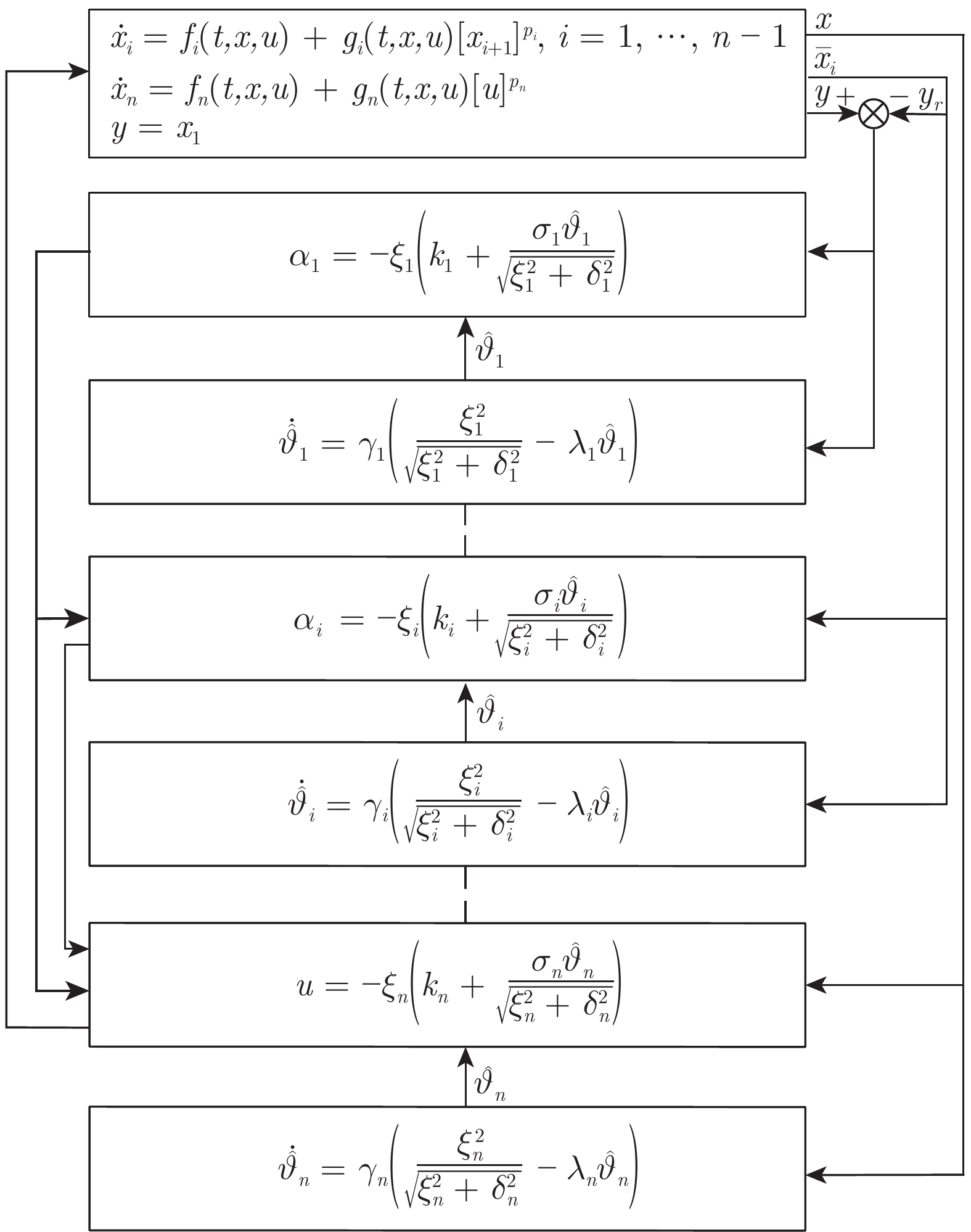
$\xi_n = \dfrac{z_n}{\mu_n^2-z_n^{2}}$ ,$ \hat{\vartheta}_n $ 是$ \vartheta_n $ 的估计值且满足,$\hat{\vartheta}_n(0)\ge 0$ ,$ k_n $ ,$ \sigma_n $ ,$ \gamma_n $ 和$ \lambda_n $ 为正常数.上述自适应控制器的设计过程如图1所示.
注 3. 如式(14) ~ (17)所示, 本文提出的自适应反推控制策略不依赖于系统幂次
$ p_i $ 及其上界信息, 且无需知晓系统函数$ f_i(t,{\boldsymbol{x}},u) $ ,$ g_i(t,{\boldsymbol{x}},u) $ 及相应的界函数$ \bar{f}_{il}(\bar{{\boldsymbol{x}}}_i) $ ,$ \underline{g}_i(\bar{{\boldsymbol{x}}}_{i}) $ ,$ \bar{g}_i(\bar{{\boldsymbol{x}}}_{i}) $ 的解析表达式. 同时, 该控制策略未包含虚拟控制律$ \alpha_i $ 的导数, 消除了积分反推法中“计算膨胀”问题.2.2 稳定性分析
在给出闭环系统的稳定性分析之前, 先引入如下命题.
命题 1. 对式(14) ~ (17)的
$\hat{\vartheta}_1,\cdots,\hat{\vartheta}_n, \alpha_1,\cdots, \alpha_{n-1}$ 和$ u $ , 下列陈述成立i)
$ \hat{\vartheta}_i(t)\ge 0 $ ,$i = 1,\cdots,n$ .ii)
$\xi_i[\alpha_i]^{p_i} = -|\xi_i||\alpha_i|^{p_i} \le 0, \xi_n [u]^{p_n} = -|\xi_n| |u|^{p_n}$ ,$i = 1,\cdots,n-1$ .证明. i) 由于
$\dfrac{\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}\ge 0$ 和$ \hat{\vartheta}_i(0)\ge 0 $ , 根据式(15)和式(17), 可直接推出$ \hat{\vartheta}_i(t)\ge 0 $ ,$i = 1,\cdots,n$ .ii) 根据式(14)和式(16),
$ \alpha_i $ ,$i = 1,\cdots,n-1$ 和$ u $ 改写为$$ \alpha_i = \xi_i\phi_i,i = 1,\cdots,n-1 $$ (18) $$ u = \xi_n\phi_n\hspace{74pt} $$ (19) 其中,
$$ \phi_i = -k_i-\frac{\sigma_i\hat{\vartheta}_i}{\sqrt{\xi_i^2+\delta_i^2}},\;\;i = 1,\cdots,n $$ (20) 从而, 有
$$ \begin{split} \xi_i[\alpha_i]^{p_i} =&\; \xi_i|\alpha_i|^{p_i}{\rm{sign}}(\xi_i\phi_i)\\& \quad i = 1,\cdots,n-1\end{split} $$ (21) $$ \xi_n [u]^{p_n} = \xi_n |u|^{p_n}{\rm{sign}}(\xi_n\phi_n) $$ (22) 另外, 由于
$ \hat{\vartheta}_i(t)\ge 0 $ ,$i = 1,\cdots,n$ , 从式(20)易知$ \phi_i\le 0 $ ,$i = 1,\cdots,n$ , 进而可得${\rm{sign}}(\xi_i\phi_i) = -{\rm{sign}}(\xi_i)$ ,$i = 1,\cdots,n$ . 故$$ \begin{split} \xi_i[\alpha_i]^{p_i} =&\; -|\xi_i||\alpha_i|^{p_i}\le 0\\ & i = 1,\cdots,n-1 \end{split}$$ (23) $$ \xi_n [u]^{p_n} = -|\xi_n| |u|^{p_n}\le 0 $$ (24) □
本文主要结论可总结为如下定理.
定理 1. 对满足假设1和假设2的高阶不确定非线性系统(1), 在任意初始条件
$ {\boldsymbol{x}}(0) $ 下, 控制器(16)以及自适应律(15)和(17)保证了闭环系统的所有信号一致有界, 并且输出跟踪误差可以收敛到残差为任意小的残差集.证明. 本证明共分为3部分. 首先, 证明由系统(1), 控制器(16), 自适应律(15)和(17)组成的闭环系统在最大存在区间
$ [0,t_f) $ 上存在唯一解${\pmb\eta}(t) = [z_1(t),\cdots,z_n(t),\hat{\vartheta}_1(t),\cdots,\hat{\vartheta}_n(t)]^{\rm{T}}$ . 然后, 采用反证法证明$ t_f = +\infty $ . 最后, 实现本文控制目标.Part 1. 根据式(14)和式(16), 虚拟控制律
$\alpha_1,\cdots, \alpha_{n-1}$ , 实际控制律$ u $ 以及系统状态$x_1,\cdots,x_n$ 可写为$$ \alpha_i = \check{\alpha}_i(z_i,\hat{\vartheta}_i),i = 1,\cdots,n-1 $$ (25) $$ u = \check{\alpha}_n(z_n,\hat{\vartheta}_n) $$ (26) $$ x_1 = z_1+y_r= \check{x}_1(t,z_1) $$ (27) $$ \begin{split} x_i =\; & z_i+\check{\alpha}_{i-1}(t,z_{i-1},\hat{\vartheta}_{i-1})=\\ & \check{x}_i(t,z_{i-1},z_i,\;\hat{\vartheta}_{i-1}),i = 2,\cdots,n \end{split} $$ (28) 因此, 由式(1)和式(14)
$ \sim $ (17)组成的闭环系统可改写为$$ \begin{split} \dot{z}_1 =\;& f_1(t,\check{{\boldsymbol{x}}},\check{\alpha}_n)+g_1(t,\check{{\boldsymbol{x}}},\check{\alpha}_n)[\check{x}_2]^{p_1}-\dot{y}_r=\\ &\varphi_1(t,z_1,\cdots,z_n,\hat{\vartheta}_1,\cdots,\hat{\vartheta}_n) \end{split} $$ (29) $$ \begin{split} \dot{z}_i = \;& f_i(t,\check{{\boldsymbol{x}}},\check{\alpha}_n)+g_i(t,\check{{\boldsymbol{x}}},\check{\alpha}_n)[\check{x}_{i+1}]^{p_i}\;-\\ &\frac{\partial \check{\alpha}_{i-1}}{\partial t}-\frac{\partial \check{\alpha}_{i-1}}{\partial z_{i-1}}\varphi_{i-1}-\gamma_{i-1}\frac{\partial \check{\alpha}_{i-1}}{\partial \hat{\vartheta}_{i-1}}\;\times\\ &\left(\frac{\xi_{i-1}^2}{\sqrt{\xi_{i-1}^2+\delta_{i-1}^2}}-\lambda_{i-1}\hat{\vartheta}_{i-1}\right)=\\ & \varphi_i(t,z_1,\cdots,z_n,\hat{\vartheta}_1,\cdots,\hat{\vartheta}_n),\\ &\qquad\qquad\qquad\qquad\;\; i = 2,\cdots,n-1 \end{split}$$ (30) $$ \begin{split} \dot{z}_n =\; &f_n(t,\check{{\boldsymbol{x}}},\check{\alpha}_n)+g_n(t,\check{{\boldsymbol{x}}},\check{\alpha}_n)[\check{\alpha}_n]^{p_n}-\\ &\frac{\partial \check{\alpha}_{n-1}}{\partial t}-\frac{\partial \check{\alpha}_{n-1}}{\partial z_{n-1}}\varphi_{n-1}-\gamma_{n-1}\frac{\partial \check{\alpha}_{n-1}}{\partial \hat{\vartheta}_{n-1}}\times\\ &\left(\frac{\xi_{n-1}^2}{\sqrt{\xi_{n-1}^2+\delta_{n-1}^2}}-\lambda_{n-1}\hat{\vartheta}_{n-1}\right)=\\& \varphi_n(t,z_1,\cdots,z_n,\hat{\vartheta}_1,\cdots,\hat{\vartheta}_n) \end{split}$$ (31) $$ \begin{split} \dot{\hat{\vartheta}}_i =\;& \gamma_i\Big(\frac{\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}-\lambda_i\hat{\vartheta}_i\Big)=\\ & \varphi_{n+i}(t,z_i,\hat{\vartheta}_i),\;\;i = 1,\cdots,n \end{split} $$ (32) 其中,
$\check{{\boldsymbol{x}}} = [\check{x}_1,\cdots,\check{x}_n]^{\rm{T}}\in {{\bf{R}}}^n$ .定义开集
$$ \Xi = \underbrace{(-\mu_1,\mu_1)\times\cdots\times(-\mu_n,\mu_n)}_n\times {{\bf{R}}}^n $$ 由于
$\mu_i > |z_i(0)|$ ,$i = 1,\cdots,n$ , 可知${\boldsymbol{\eta}}(0) = [z_1(0), \cdots, z_n(0),\hat{\vartheta}_1(0),\cdots,\hat{\vartheta}_n(0)]^{\rm{T}}\in \Xi$ . 同时, 由于期望参考信号$ y_r $ 及其导数$ \dot{y}_r $ 有界, 函数$ f_i, g_i $ ,$i = 1,\cdots, n$ 在$ t $ 上分段连续, 且关于$ {\boldsymbol{x}} $ 和$ u $ 满足局部Lipschitz条件, 可推得$ \varphi_i:{{\bf{R}}}_{\ge0}\times \Xi\rightarrow {{\bf{R}}} $ 在$ t $ 上分段连续, 且关于$ {\boldsymbol{x}} $ 和$ u $ 满足局部Lipschitz条件. 根据微分方程解的存在唯一性定理[33], 对任意初始条件$ {\boldsymbol{\eta}}(0) $ , 闭环系统(29) ~ (32)在最大存在区间$ [0,t_f) $ 上存在唯一解${\boldsymbol{\eta}} = [z_1,\cdots,z_n,\hat{\vartheta}_1,\cdots,\hat{\vartheta}_n]^{\rm{T}}\in \Xi$ , 即, 对$\forall t\in [0,t_f)$ ,$ |z_i|<\mu_i $ ,$i = 1,\cdots,n$ .Part 2. 本部分采用反证法证明
$ t_f = +\infty $ . 为此, 不妨假设$ t_f<+\infty $ .考虑如下障碍李雅普诺夫函数[26]:
$$ V_i = \frac{1}{{2}}\log\frac{\mu_i^2}{\mu_i^2-z_i^{2}}+\frac{\sigma_i\omega_{il} }{2\gamma_i}\tilde{\vartheta}_i^2,\;\;i = 1,\cdots,n $$ (33) 其中,
$ \tilde{\vartheta}_i = \vartheta_i-\hat{\vartheta}_i $ ,$ \omega_{il} $ 是未知正常数.步骤
$ {\boldsymbol{i}} $ ${\boldsymbol{(i = 1,\cdots,n-1)}}$ .$ V_i $ 的导数为$$ \begin{split} \dot{V}_i = \;&\xi_i\Big(f_i(t,{\boldsymbol{x}},u)+g_i(t,{\boldsymbol{x}},u)[x_{i+1}]^{p_i}-\dot{\alpha}_{i-1}\Big)-\\ &\frac{\sigma_i\omega_{il} }{\gamma_i}\tilde{\vartheta}_i\dot{\hat{\vartheta}}_i \\[-10pt]\end{split}$$ (34) 其中,
$ \alpha_0 = y_r $ .根据假设1和引理2, 下列不等式成立
$$ \begin{split} &|f_i(t,{\boldsymbol{x}},u)|\le\\ &\qquad\sum\limits_{l = 1}^{j_i}|x_{i+1}|^{q_{il}}\bar{f}_{il}(\bar{{\boldsymbol{x}}}_i)\le\\ &\qquad\sum\limits_{l = 1}^{j_i}\Bigg[\frac{g_i(t,{\boldsymbol{x}},u)|x_{i+1}|^{p_i}}{2j_i}+\\ &\qquad\frac{p_i-q_{il}}{p_i}\left(\frac{2j_iq_{il}\bar{f}_{il}(\bar{{\boldsymbol{x}}}_i)}{p_ig_i(t,{\boldsymbol{x}},u)}\right)^{\frac{q_{il}}{p_i-q_{il}}}\bar{f}_{il}(\bar{{\boldsymbol{x}}}_i)\Bigg]\le\\ &\qquad\frac{g_i(t,{\boldsymbol{x}},u)|x_{i+1}|^{p_i}}{2}+\psi_i(\bar{{\boldsymbol{x}}}_i) \end{split} $$ (35) 其中,
$$ \begin{split} \psi_i(\bar{{\boldsymbol{x}}}_i) =& \sum\limits_{l = 1}^{j_i}\frac{p_i-q_{il}}{p_i}\times\\ &\left(\frac{2j_iq_{il}\bar{f}_{il}(\bar{{\boldsymbol{x}}}_i)}{p_i\underline{g}_i(\bar{{\boldsymbol{x}}}_i)}\right)^{\tfrac{q_{il}}{p_i-q_{il}}}\bar{f}_{il}(\bar{{\boldsymbol{x}}}_i) \end{split}$$ 将式(35)代入式(34), 可得
$$ \begin{split} \dot{V}_i\le\; &g_i(t,{\boldsymbol{x}},u)\xi_i [x_{i+1}]^{p_i}+\frac{g_i(t,{\boldsymbol{x}},u)|\xi_i|}{2}|x_{i+1}|^{p_i}+\\& |\xi_i|\Big(\psi_i(\bar{{\boldsymbol{x}}}_i)+|\dot{\alpha}_{i-1}|\Big)-\frac{\sigma_i\omega_{il} }{\gamma_i}\tilde{\vartheta}_i\dot{\hat{\vartheta}}_i \\[-10pt]\end{split}$$ (36) 根据命题1, 可得
$$ \begin{split} \dot{V}_i\le \;&g_i(t,{\boldsymbol{x}},u)\xi_{i}([x_{i+1}]^{p_i}-[\alpha_{i}]^{p_i})+\\ &\frac{g_i(t,{\boldsymbol{x}},u)|\xi_i|}{2}\Big(|x_{i+1}|^{p_i}-|\alpha_{i}|^{p_i}\Big)+\\ &|\xi_i|\Big(\psi_i(\bar{{\boldsymbol{x}}}_i)+|\dot{\alpha}_{i-1}|\Big)+\\ &\frac{g_i(t,{\boldsymbol{x}},u)\xi_{i}}{2}[\alpha_i]^{p_i}-\frac{\sigma_i\omega_{il} }{\gamma_i}\tilde{\vartheta}_i\dot{\hat{\vartheta}}_i\le\\ &\frac{3g_i(t,{\boldsymbol{x}},u)|\xi_i|}{2}|[x_{i+1}]^{p_i}-[\alpha_{i}]^{p_i}|+\\ &|\xi_i|\Big(\psi_i(\bar{{\boldsymbol{x}}}_i)+|\dot{\alpha}_{i-1}|\Big)-\frac{\sigma_i\omega_{il} }{\gamma_i}\tilde{\vartheta}_i\dot{\hat{\vartheta}}_i+\\& \frac{g_i(t,{\boldsymbol{x}},u)\xi_{i}}{2}[\alpha_i]^{p_i} \end{split}$$ (37) 为了处理式(37)中的项
$ |\xi_i||[x_{i+1}]^{p_i}-[\alpha_{i}]^{p_i}| $ , 考虑以下两种情形.情形 1. 当
$ p_i = 1 $ 时. 由Part 1可得:$|z_{i+1}| < \mu_{i+1}$ ,$ \forall t\in [0,t_f) $ , 因而$$ \begin{split} &|\xi_i||[x_{i+1}]^{p_i}-[\alpha_{i}]^{p_i}|= |\xi_i||z_{i+1}|\le\\ &\qquad \mu_{i+1}|\xi_i|, \;\;\forall t\in [0,t_f) \end{split} $$ (38) 情形 2. 当
$ p_i>1 $ 时. 由引理2和引理3以及$|z_{i+1}| < \mu_{i+1}$ ,$ \forall t\in [0,t_f) $ , 可得$$\begin{split} &|\xi_i||[x_{i+1}]^{p_i}-[\alpha_{i}]^{p_i}|=\\ &\quad\; \; \; \; |\xi_i||[z_{i+1}+\alpha_{i}]^{p_i}-[\alpha_{i}]^{p_i}|\le\\ &\quad\; \; \; \; c_{p_i}|\xi_i|(\mu_{i+1}^{p_i}+\mu_{i+1}|\alpha_i|^{p_i-1})\le\\ &\quad\; \; \; \; |\xi_i|\Big(\frac{|\alpha_i|^{p_i}}{6}+\bar{\varepsilon}_{i1}\Big),\;\;\forall t\in [0,t_f) \end{split}$$ (39) 其中,
$$ \begin{split} &c_{p_i} = p_i(2^{p_i-2}+2)\\ &\bar{\varepsilon}_{i1} = c_{p_i}\mu_{i+1}^{p_i}+\frac{1}{p_i}\left(\frac{6(p_i-1)}{p_i}\right)^{p_i-1}(c_{p_i}\mu_{i+1})^{p_i} \end{split}$$ 综合情形1和情形2, 项
$ |\xi_i||[x_{i+1}]^{p_i}-[\alpha_{i}]^{p_i}| $ 放缩为$$ \begin{split} &|\xi_i||[x_{i+1}]^{p_i}-[\alpha_{i}]^{p_i}| \le\\ &\quad|\xi_i|\Big(\frac{|\alpha_i|^{p_i}}{6}+\bar{\varepsilon}_{i1}+\mu_{i+1}\Big),\;\forall t\in [0,t_f) \end{split} $$ (40) 将式(40)代入式(37)中, 并结合命题1, 易得
$$ \begin{split} \dot{V}_i\le\;&\omega_i\xi_{i}[\alpha]^{p_i}-\frac{\sigma_i\omega_{il} }{\gamma_i}\tilde{\vartheta}_i\dot{\hat{\vartheta}}_i\;+\\ &|\xi_i|\nu_i,\;\;\forall t\in [0,t_f) \end{split} $$ (41) 其中,
$\omega_i = \dfrac{\underline{g}_i(\bar{{\boldsymbol{x}}}_i)}{4}$ ,$\nu_i = \psi_i(\bar{{\boldsymbol{x}}}_i)+|\dot{\alpha}_{i-1}|+\dfrac{3}{2}\bar{g}_i(\bar{{\boldsymbol{x}}}_{i})\times (\bar{\varepsilon}_{i1}+ \mu_{i+1})$ .由Part 1可知, 对
$ \forall t\in [0,t_f) $ ,$ |z_j|<\mu_j $ ,$j = 1, \cdots, i$ . 同时, 依据假设1和假设2,$ y_r $ ,$ \dot{y}_r $ 有界, 且$ \bar{f}_{il} $ ,$ \underline{g}_i $ 和$ \bar{g}_i $ 为连续函数. 此外, 根据第$ i-1 $ 步设计, 可推知$x_1,\cdots,x_i$ ,$ \dot{\alpha}_{i-1} $ 有界,$ \forall t\in [0,t_f) $ . 因此, 运用极值定理, 对$ \forall t\in [0,t_f) $ , 有$$ 0< \omega_{il}\le \omega_i \, $$ (42) $$ 0\le \nu_i\le \nu_{im} $$ (43) 其中,
$ \omega_{il} $ 和$ \nu_{im} $ 为未知正常数.将式(42)和式(43)代入式(41)中, 有
$$ \begin{split} \dot{V}_i\le\;&\omega_{il}\xi_{i}[\alpha_i]^{p_i}-\frac{\sigma_i\omega_{il} }{\gamma_i}\tilde{\vartheta}_i\dot{\hat{\vartheta}}_i+\\ &\nu_{im}|\xi_i|,\;\;\forall t\in [0,t_f) \end{split} $$ (44) 通过式(14)和式(15), 并结合引理3, 可得
$$ \begin{split} \dot{V}_i\le\;&-\omega_{il}|\xi_{i}|^{p_i+1}\left(k_i+\frac{\sigma_i\hat{\vartheta}_i}{\sqrt{\xi_i^2+\delta_i^2}}\right)^{p_i}-\\& \sigma_i\omega_{il} \tilde{\vartheta}_i\left(\frac{\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}-\lambda_i\hat{\vartheta}_i\right)+\nu_{im}|\xi_i|\le\\ &-\omega_{il} |\xi_{i}|^{p_i+1}\left(\frac{\sigma_i\hat{\vartheta}_i}{\sqrt{\xi_i^2+\delta_i^2}}\right)^{p_i}+\sigma_i\omega_{il} \vartheta_i|\xi_i|-\\ &\frac{\sigma_i\omega_{il} \tilde{\vartheta}_i\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}-\omega_{il} k_i^{p_i}|\xi_{i}|^{p_i+1}+\\ &\sigma_i\omega_{il} \lambda_i\tilde{\vartheta}_i\hat{\vartheta}_i,\;\;\forall t\in [0,t_f) \end{split} $$ (45) 其中,
$\vartheta_i = \dfrac{\nu_{im}}{\sigma_i\omega_{il}}$ .根据引理2和引理4, 式(45)中的项
$ \sigma_i\omega_{il}\vartheta_i|\xi_i| $ 放缩为$$ \begin{split} \sigma_i\omega_{il} \vartheta_i|\xi_i|\le\;&\frac{\sigma_i\omega_{il} \vartheta_i\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}+\delta_i\sigma_i\omega_{il} \vartheta_i\le\\ &\frac{\sigma_i\omega_{il} \hat{\vartheta}_i\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}+\frac{\sigma_i\omega_{il} \tilde{\vartheta_i}\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}+\delta_i\sigma_i\omega_{il} \vartheta_i\le\\& \omega_{il} |\xi_{i}|^{p_i+1}\left(\frac{\sigma_i\hat{\vartheta}_i}{\sqrt{\xi_i^2+\delta_i^2}}\right)^{p_i}+\bar{\varepsilon}_{i2}\omega_{il} |\xi_i|+\\ &\frac{\sigma_i\omega_{il} \tilde{\vartheta_i}\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}+\delta_i\sigma_i\omega_{il} \vartheta_i\le\\ & \omega_{il} |\xi_{i}|^{p_i+1}\left(\frac{\sigma_i\hat{\vartheta}_i}{\sqrt{\xi_i^2+\delta_i^2}}\right)^{p_i}+\\ &\frac{1}{2}\omega_{il} k_i^{p_i}|\xi_{i}|^{p_i+1}+\frac{\sigma_i\omega_{il} \tilde{\vartheta_i}\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}}+\\ &\bar{\varepsilon}_{i3}+\delta_i\sigma_i\omega_{il} \vartheta_i,\;\;\forall t\in [0,t_f) \\[-10pt]\end{split} $$ (46) 其中,
$$ \begin{split} &{{\bar \varepsilon }_{i2}} = \left\{ {\begin{array}{*{20}{l}} {0,}&{{p_i} = 1}\\ {\dfrac{{{p_i} - 1}}{{{p_i}}}{{\left(\dfrac{1}{{{p_i}}}\right)}^{\tfrac{1}{{{p_i} - 1}}}},}&{{p_i} > 1} \end{array}} \right.\\ &{{\bar \varepsilon }_{i3}} = \left\{ {\begin{array}{*{20}{l}} {0,}&{{{\bar \varepsilon }_{i2}} = 0}\\ {\dfrac{{{{\bar \varepsilon }_{i2}}{\omega _{il}}{p_i}}}{{{p_i} + 1}}{{\left(\dfrac{{2{{\bar \varepsilon }_{i2}}}}{{k_i^{{p_i}}({p_i} + 1)}}\right)}^{\tfrac{1}{{{p_i}}}}}},&{{{\bar \varepsilon }_{i2}} > 0} \end{array}} \right. \end{split}$$ 由式(45)和式(46), 可得
$$\begin{split} \dot{V}_i\le\; &-\frac{1}{2}\omega_{il} k_i^{p_i}|\xi_{i}|^{p_i+1}+\sigma_i\omega_{il} \lambda_i\tilde{\vartheta}_i\hat{\vartheta}_i\;+\\ &\bar{\varepsilon}_{i3}+\delta_i\sigma_i\omega_{il} \vartheta_i,\;\;\forall t\in [0,t_f) \end{split} $$ (47) 依据引理2和引理5, 以及Young不等式, 则有
$$ \begin{split} \dot{V}_i\le&-\frac{1}{2}\omega_{il} k_i^{p_i}\xi_{i}^2-\frac{1}{2}\sigma_i\omega_{il} \lambda_i\tilde{\vartheta}_i^2+\varepsilon_i\le\\ &-\frac{\omega_{il} k_i^{p_i}}{2\mu_i^2}\log\frac{\mu_i^2}{\mu_i^2-z_i^{2}}-\frac{1}{2}\sigma_i\omega_{il} \lambda_i\tilde{\vartheta}_i^2+\varepsilon_i\le\\ &-\chi_iV_i+\varepsilon_i,\;\;\forall t\in [0,t_f) \end{split}$$ (48) 其中,
$$ \begin{split} &{\chi _i} = \min \left\{ \frac{{{\omega _{il}}k_i^{{p_i}}}}{{\mu _i^2}},{\gamma _i}{\lambda _i}\right\} \\ &{{\bar \varepsilon }_{i4}} = \frac{1}{2}{\sigma _i}{\omega _{il}}{\lambda _i}\vartheta _i^2 + {{\bar \varepsilon }_{i3}} + {\delta _i}{\sigma _i}{\omega _{il}}{\vartheta _i}\\ &{\varepsilon _i} = \left\{ \begin{array}{*{20}{l}} {{{\bar \varepsilon }_{i4}},}&{{p_i} = 1}\\ {\dfrac{{{\omega _{il}}k_i^{{p_i}}({p_i} - 1)}}{{2({p_i} + 1)}}{{\left(\dfrac{2}{{{p_i} + 1}}\right)}^{\tfrac{2}{{{p_i} - 1}}}} + {{\bar \varepsilon }_{i4}},}&{{p_i} > 1} \end{array} \right. \end{split} $$ 因此, 存在正常数
$ \chi_i^* $ 和$ \varepsilon_i^* $ 满足$$ 0<\chi_i^*\le\chi_i $$ (49) $$ 0<\varepsilon_i\le\varepsilon_i^* $$ (50) 由式(48) ~ (50), 可得
$$ \dot{V}_i\le-\chi_i^*V_i+\varepsilon_i^*,\;\forall t\in [0,t_f) $$ (51) 因此, 对
$ \forall t\in [0,t_f) $ 中, 有$$ \frac{1}{2}\log\frac{\mu_i^2}{\mu_i^2-z_i^{2}}\le V_i\le \varpi_i $$ (52) $$ \frac{\sigma_i\omega_{il} }{2\gamma_i}\tilde{\vartheta}_i^2\le V_i\le \varpi_i\;\; \qquad $$ (53) 其中,
$\varpi_i = \max\{V_i(0),\dfrac{\varepsilon_i^*}{\chi_i^*}\}$ .从式(52)和式(53), 可得
$$ |z_i|\le\bar{\mu}_i = \mu_i\sqrt{1-\exp(-{2}\varpi_i)}<\mu_i $$ (54) $$ |\hat{\vartheta}_i|\le\bar{\vartheta}_i = \sqrt{\frac{2\gamma_i\varpi_i}{\sigma_i\omega_{il}}}+\vartheta_i,\;\forall t\in [0,t_f) $$ (55) 进而可推出, 对
$ \forall t\in [0,t_f) $ ,$ \alpha_i $ 和$ x_{i+1} $ 有界. 接着, 对$ \alpha_i $ 和$ \xi_i $ 分别求导, 可得$$ \begin{split}|\dot{\alpha}_i|\le&\left\{-\left(k_i+\frac{\sigma_i\hat{\vartheta}_i}{\sqrt{\xi_i^2+\delta_i^2}}\right)+\frac{\sigma_i\hat{\vartheta}_i\xi_i^2}{\sqrt{(\xi_i^2+\delta_i^2)^3}}\right\}\dot{\xi}_i+\\ & \frac{\gamma_i\sigma_i\xi_i}{\sqrt{\xi_i^2+\delta_i^2}}\left(\frac{\xi_i^2}{\sqrt{\xi_i^2+\delta_i^2}} -\lambda_i\hat{\vartheta}_i\right),\;\;\forall t\in [0,t_f) \end{split}$$ (56) $$ \begin{split} |\dot{\xi}_i| =\; &\frac{(\mu_i^2+z_i^2)}{(\mu_i^2-z_i^2)^2}\Big(f_i(t,{\boldsymbol{x}},u)\;+\\ &g_i(t,{\boldsymbol{x}},u)[x_{i+1}]^{p_i}-\dot{\alpha}_{i-1}\Big)\le\\ &\frac{(\mu_i^2+z_i^2)}{(\mu_i^2-z_i^2)^2}\Big(\sum\limits_{l = 1}^{j_i}|x_{i+1}|^{q_{il}}\bar{f}_{il}(\bar{{\boldsymbol{x}}}_i)+|\dot{\alpha}_{i-1}|+\\ &\bar{g}_i(\bar{{\boldsymbol{x}}}_{i})|x_{i+1}|^{p_i}\Big),\;\;\forall t\in [0,t_f)\\[-10pt] \end{split} $$ (57) 从式(56)和式(57)可知, 对
$ \forall t\in [0,t_f) $ ,$ \dot{\xi}_i $ 和$ \dot{\alpha}_i $ 亦有界.步骤
$ {\boldsymbol{n}} $ . 求$ V_n $ 的导数, 可得$$ \begin{split} \dot{V}_n =& \frac{z_n}{\mu_n^2-z_n^{2}}(f_n(t,{\boldsymbol{x}},u) + g_n(t,{\boldsymbol{x}},u)[u]^{p_n}-\dot{\alpha}_{n-1})-\\ &\frac{\sigma_n\beta_n}{\gamma_n}\tilde{\vartheta}_n\dot{\hat{\vartheta}}_n \\[-10pt]\end{split}$$ (58) 类似于式(35)的推导过程, 利用假设1和引理2, 可得
$$ |f_n(t,{\boldsymbol{x}},u)|\le \frac{1}{2}g_n(t,{\boldsymbol{x}},u)|u|^{p_n}+\psi_n(\bar{{\boldsymbol{x}}}_n) $$ (59) 其中,
$$ \begin{split} \psi_n(\bar{{\boldsymbol{x}}}_n) = &\sum\limits_{l = 1}^{j_n}\frac{p_n-q_{nl}}{p_n}\times\\ &\left(\frac{2j_nq_{nl}\bar{f}_{nl}(\bar{{\boldsymbol{x}}}_n)}{p_n\underline{g}_n(\bar{{\boldsymbol{x}}}_n)}\right)^{\frac{q_{nl}}{p_n-q_{nl}}}\bar{f}_{nl}(\bar{{\boldsymbol{x}}}_n) \end{split}$$ 由式(59)以及命题1, 可推得
$$ \dot{V}_n\le\omega_n\xi_n[u]^{p_n}+|\xi_n|\nu_n-\frac{\sigma_n\omega_{nl} }{\gamma_n}\tilde{\vartheta}_n\dot{\hat{\vartheta}}_n $$ (60) 其中,
$\omega_n = \dfrac{\underline{g}_n(\bar{{\boldsymbol{x}}}_n)}{2}$ ,$ \nu_n = \psi_n(\bar{{\boldsymbol{x}}}_n)+|\dot{\alpha}_{n-1}| $ .由Part 1可知, 对
$ \forall t\in [0,t_f) $ ,$ |z_j|<\mu_j $ ,$j = 1, \cdots, n$ . 同时, 根据假设1和假设2,$ y_r $ 和$ \dot{y}_r $ 有界, 且$ \bar{f}_{nl} $ ,$ \underline{g}_n $ 和$ \bar{g}_n $ 连续. 此外, 由第$ n-1 $ 步设计可推得$x_1,\cdots, x_n$ ,$ \dot{\alpha}_{n-1} $ 有界,$ \forall t\in [0,t_f) $ . 因此, 运用极值定理, 对$ \forall t\in [0,t_f) $ , 有$$ 0< \omega_{nl}\le \omega_n $$ (61) $$ 0\le \nu_n\le \nu_{nm} $$ (62) 其中,
$ \omega_{nl} $ 和$ \nu_{nm} $ 为未知正常数.利用式(61)和式(62), 有
$$ \begin{split} \dot{V}_n\le\;&\omega_{nl}\xi_n[u]^{p_n}+\nu_{nm}|\xi_n|-\\& \frac{\sigma_n\omega_{nl} }{\gamma_n}\tilde{\vartheta}_n\dot{\hat{\vartheta}}_n,\;\;\forall t\in [0,t_f) \end{split} $$ (63) 根据式(16)和式(17)以及命题1和引理3, 可得
$$ \begin{split} \dot{V}_n\le&-\omega_{nl}|\xi_{n}|^{p_n+1}\Big(k_n+\frac{\sigma_n\hat{\vartheta}_n}{\sqrt{\xi_n^2+\delta_n^2}}\Big)^{p_n}-\\ &\sigma_n\omega_{nl} \tilde{\vartheta}_n\left(\frac{\xi_n^2}{\sqrt{\xi_n^2+\delta_n^2}}-\lambda_n\hat{\vartheta}_n\right)+\nu_{nm}|\xi_n|\le\\ & -\omega_{nl} |\xi_{n}|^{p_n+1}\left(\frac{\sigma_n\hat{\vartheta}_n}{\sqrt{\xi_n^2+\delta_n^2}}\right)^{p_n}-\\ &\omega_{nl} k_n^{p_n}|\xi_{n}|^{p_n+1}-\\ &\frac{\sigma_n\omega_{nl} \tilde{\vartheta}_n\xi_n^2}{\sqrt{\xi_n^2+\delta_n^2}}+\sigma_n\omega_{nl} \lambda_n\tilde{\vartheta}_n\hat{\vartheta}_n+\\ &\sigma_n\omega_{nl} \vartheta_n|\xi_n|,\;\;\forall t\in [0,t_f) \\[-10pt]\end{split}$$ (64) 其中,
$\vartheta_n = \dfrac{\nu_{nm}}{\sigma_n\omega_{nl}}$ .依据引理2和引理4, 式(64)中的项
$ \sigma_n\omega_{nl}\vartheta_n|\xi_n| $ 放缩为$$ \begin{split} \sigma_n\omega_{nl} \vartheta_n|\xi_n|\le\;&\frac{\sigma_n\omega_{nl} \vartheta_n\xi_n^2}{\sqrt{\xi_n^2+\delta_n^2}}+\delta_n\sigma_n\omega_{nl} \vartheta_n\le\\ & \frac{\sigma_n\omega_{nl} \hat{\vartheta}_n\xi_n^2}{\sqrt{\xi_n^2+\delta_n^2}}+\frac{\sigma_n\omega_{nl} \tilde{\vartheta}_n\xi_n^2}{\sqrt{\xi_n^2+\delta_n^2}}\;+\\ &\delta_n\sigma_n\omega_{nl} \vartheta_n\le\\ &\omega_{nl} |\xi_n|^{p_n+1}\left(\frac{\sigma_n\hat{\vartheta}_n}{\sqrt{\xi_n^2+\delta_n^2}}\right)^{p_n}+\\ &\bar{\varepsilon}_{n2}\omega_{nl} |\xi_n|+\delta_n\sigma_n\omega_{nl}\vartheta_n+\\ &\frac{\sigma_n\omega_{nl} \tilde{\vartheta}_n\xi_n^2}{\sqrt{\xi_n^2+\delta_n^2}}\le\\ &\omega_{nl} |\xi_n|^{p_n+1}\left(\frac{\sigma_n\hat{\vartheta}_n}{\sqrt{\xi_n^2+\delta_n^2}}\right)^{p_n}+\\ &\frac{1}{2}\omega_{nl} k_n^{p_n}\xi_{n}^{p_n+1}+\delta_n\sigma_n\omega_{nl} \vartheta_n+\\ &\frac{\sigma_n\omega_{nl}\tilde{\vartheta}_n\xi_n^2}{\sqrt{\xi_n^2+\delta_n^2}}+\bar{\varepsilon}_{n3} \end{split} $$ (65) 其中,
$$ \begin{split} &{{\bar \varepsilon }_{n2}} = \left\{ {\begin{array}{*{20}{l}} {0,}&{{p_n} = 1}\\ {\dfrac{{{p_n} - 1}}{{{p_n}}}{{\left(\dfrac{1}{{{p_n}}}\right)}^{\tfrac{1}{{{p_n} - 1}}}},}&{{p_n} > 1} \end{array}} \right.\\ &{{\bar \varepsilon }_{n3}} = \left\{ {\begin{array}{*{20}{l}} {0,}&{{{\bar \varepsilon }_{n2}} = 0}\\ {\dfrac{{{{\bar \varepsilon }_{n2}}{\omega _{nl}}{p_n}}}{{{p_n} + 1}}{{\left(\dfrac{{2{{\bar \varepsilon }_{n2}}}}{{k_n^{{p_n}}({p_n} + 1)}}\right)}^{\tfrac{1}{{{p_n}}}}},}&{{{\bar \varepsilon }_{n2}} > 0} \end{array}} \right. \end{split} $$ 将式(65)代入式(64)中, 得到
$$ \begin{split} \dot{V}_n\le\;&-\frac{1}{2}\omega_{nl} k_n^{p_n}|\xi_{n}|^{p_n+1}+\sigma_n\omega_{nl} \lambda_n\tilde{\vartheta}_n\hat{\vartheta}_n\;+\\ &\bar{\varepsilon}_{n3}+\delta_n\sigma_n\omega_{nl} \vartheta_n,\;\;\forall t\in [0,t_f) \end{split} $$ (66) 根据引理2和引理5, 以及Young不等式, 可得
$$ \begin{split} \dot{V}_n\le&-\frac{1}{2}\omega_{nl} k_n^{p_n}\xi_{n}^2-\frac{1}{2}\sigma_n\omega_{nl} \lambda_n\tilde{\vartheta}_n^2+\varepsilon_n\le\\ &-\frac{\omega_{nl} k_n^{p_n}}{2\mu_n^2}\log\frac{\mu_n^2}{\mu_n^2-z_n^{2}}-\frac{1}{2}\sigma_n\omega_{nl} \lambda_n\tilde{\vartheta}_n^2+\varepsilon_n\le\\ &-\chi_nV_n+\varepsilon_n,\forall t\in [0,t_f) \\[-10pt]\end{split} $$ (67) 其中,
$$ \begin{split} &{\chi _n} = \min \left\{ \frac{{{\omega _{nl}}k_n^{{p_n}}}}{{\mu _n^2}},{\gamma _n}{\lambda _n}\right\} \\ &{{\bar \varepsilon }_{n4}} = \frac{1}{2}{\sigma _n}{\omega _{nl}}{\lambda _n}\vartheta _n^2 + {{\bar \varepsilon }_{n3}} + {\delta _n}{\sigma _n}{\omega _{nl}}{\vartheta _n}\\ &{\varepsilon _n} = \left\{ {\begin{array}{*{20}{l}} {{{\bar \varepsilon }_{n4}},}&{{p_n} = 1}\\ {\dfrac{{{\omega _{nl}}k_n^{{p_n}}({p_n} - 1)}}{{2({p_n} + 1)}}{{\left(\dfrac{2}{{{p_n} + 1}}\right)}^{\tfrac{2}{{{p_n} - 1}}}} + {{\bar \varepsilon }_{n4}},}&{{p_n} > 1} \end{array}} \right. \end{split} $$ 因此, 存在正常数
$ \chi_n^* $ 和$ \varepsilon_n^* $ , 使得$$ 0<\chi_n^*\le \chi_n $$ (68) $$ 0<\varepsilon_n\le\varepsilon_n^* \; $$ (69) 根据式(67) ~ (69), 可得
$$ \dot{V}_n\le-\chi_n^*V_n+\varepsilon_n^*,\;\;\forall t\in [0,t_f) $$ (70) 因此, 对
$ \forall t\in [0,t_f) $ , 有$$ \frac{1}{2}\log\frac{\mu_n^2}{\mu_n^2-z_n^{2}}\le V_n\le \varpi_n $$ (71) $$ \frac{\sigma_n\omega_{nl} }{2\gamma_n}\tilde{\vartheta}_n^2\le V_n\le \varpi_n\;\;\;\;\;\;\; $$ (72) 其中,
$\varpi_n = \max\{V_n(0),\dfrac{\varepsilon_n^*}{\chi_n^*}\}$ .由式(71)和式(72), 可得
$$ |z_n|\le \bar{\mu}_n = \mu_n\sqrt{1-\exp(-{2}\varpi_n)}<\mu_n\;\;\;\;\; $$ (73) $$ |\hat{\vartheta}_n|\le\sqrt{\bar{\vartheta}_n = \frac{2\gamma_n\varpi_n}{\sigma_n\omega_{nl}}}+\vartheta_n,\;\; \forall t\in [0,t_f) $$ (74) 故可推出, 对
$ \forall t\in [0,t_f) $ ,$ u $ 有界.由步骤 1 ~
$n $ 可知, 存在紧子集$\Xi' = [-\bar{\mu}_1,\bar{\mu}_1]\,\times \cdots\times [-\bar{\mu}_n, \bar{\mu}_n]\times [-\bar{\vartheta}_1,\bar{\vartheta}_1]\times\cdots\times[-\bar{\vartheta}_n,\bar{\vartheta}_n]\subset \Xi$ , 使得闭环系统在$ [0,t_f) $ 上存在唯一解$ {\boldsymbol{\eta}}(t)\in \Xi' $ . 根据引理1, 可得:$ t_f = +\infty $ , 即, 对$ \forall t \in [0,+\infty) $ ,$|z_i| < \mu_i$ ,$i = 1, \cdots,n$ .Part 3. 重复Part 2中的步骤1 ~ n, 可得
$x_1,\cdots, x_n$ ,$\alpha_1,\cdots,\alpha_{n-1}$ 和$ u $ 均有界,$ \forall t \in [0,+\infty) $ . 另外, 从式(54)可知, 通过减小$ \mu_1 $ 和$ \varpi_1 $ 可将输出跟踪误差$ z_1 $ 收敛到任意小的残差集. □注 4. 不同于文献[20-25]中提出的控制方案, 本文采用积分反推技术和障碍李雅普诺夫方法解决了高阶非线性系统中幂次未知和系统函数不确定的问题, 且所设计控制策略不依赖于未知幂次的上界信息.
3. 仿真算例
为了验证本文所提控制算法的有效性与通用性, 考虑如下两个高阶非线性系统
$$ {\Sigma _1}:\left\{ \begin{aligned} &{{{\dot x}_1} = {f_{1,{\Sigma _1}}} + {g_{1,{\Sigma _1}}}{{[{x_2}]}^{{p_1}}}}\\ &{{{\dot x}_2} = {f_{2,{\Sigma _1}}} + {g_{2,{\Sigma _1}}}{{[u]}^{{p_2}}}}\\ &{y = {x_1}} \end{aligned} \right. $$ (75) $$ {\Sigma _2}:\left\{ \begin{aligned} &{{{\dot x}_1} = {f_{1,{\Sigma _2}}} + {g_{1,{\Sigma _2}}}{{[{x_2}]}^{{p_1}}}}\\ &{{{\dot x}_2} = {f_{2,{\Sigma _2}}} + {g_{2,{\Sigma _2}}}{{[u]}^{{p_2}}}}\\ &{y = {x_1}} \end{aligned} \right. $$ (76) 其中,
$p_1 = {5}/{3}$ ,$p_2 ={7}/{3}$ ,$ f_{1,\Sigma_1} = x_1\cos (t) $ ,$g_{1,\Sigma_1} = 3+ 0.5\sin (t)$ ,$f_{2,\Sigma_1} = x_1+2\sin (x_1x_2)$ ,$g_{2,\Sigma_1} = 2+ 0.1\sin (t)$ ,$f_{1,\Sigma_2} \;= \;(0.5x_1\; +\; 1)\cos (t)$ ,$g_{1,\Sigma_2} = 2 + 0.1\sin (t)$ ,$f_{2,\Sigma_2} = \cos (x_1 )\exp(2x_2\sin (x_1 )) + x_1x_2\sin (t)$ ,$g_{2,\Sigma_2} = 1$ , 期望参考信号$y_r(t) = \dfrac{\pi}{2}(1 - \exp( -0.1t^2)) \sin (t)$ .在仿真中, 系统
$ \Sigma_i $ 和自适应参数$ \hat{\vartheta}_i $ 的初始值设置为$ [x_1(0),x_2(0)]^{\rm{T}} = [-0.5,0.4]^{\rm{T}} $ ,$ \hat{\vartheta}_i(0) = 0 $ ,$i = 1,2$ . 控制器参数$ k_1 = 2 $ ,$ k_2 = 1 $ ,$ \mu_1 = 4 $ ,$ \mu_2 = 2 $ ,$ \sigma_1 = 3 $ ,$ \sigma_2 = 2 $ ,$ \gamma_1 = 2 $ ,$ \gamma_2 = 3 $ ,$ \delta_1 = \delta_2 = 0.01 $ 和$ \lambda_1 = \lambda_2 = 0.002 $ , 其中,$ \mu_1 = 4>|z_1(0)| = 0.5 $ ,$\mu_2 = 2 > |z_2(0)| = {106}/{315}$ . 系统$ \Sigma_1 $ 和$ \Sigma_2 $ 的仿真结果如图2 ~ 4所示. 图2刻画了输出跟踪误差$ y-y_r $ 的变化情况, 图3给出系统的控制信号$ u $ , 图4描述了自适应参数$ \hat{\vartheta}_1 $ 和$ \hat{\vartheta}_2 $ . 从仿真结果可以看出, 本文所提自适应控制策略既能使系统$ \Sigma_1 $ 和$ \Sigma_2 $ 的输出跟踪误差收敛到原点附近的较小邻域内, 又能确保闭环系统的所有信号有界.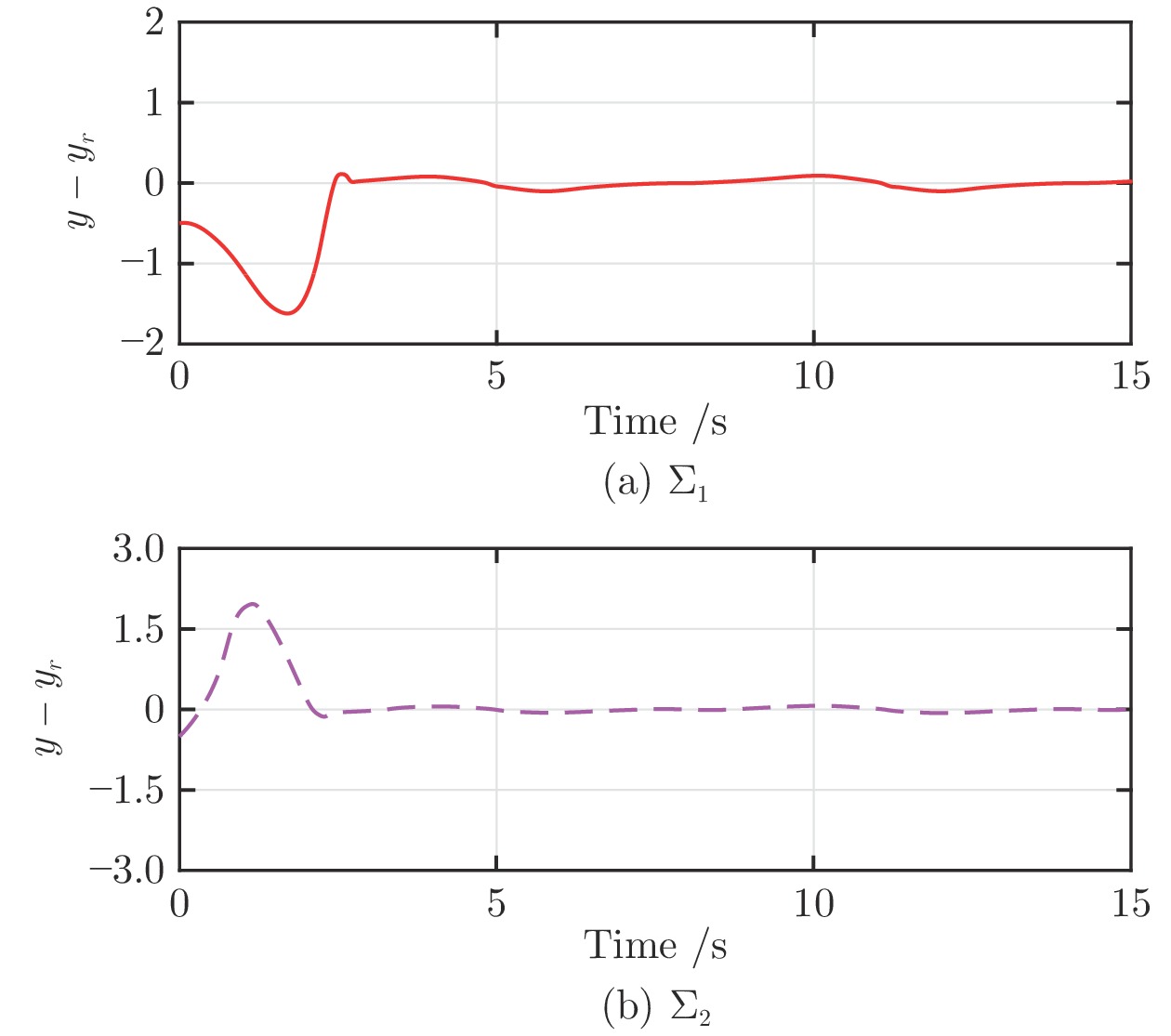 图 2 系统
图 2 系统$\Sigma_1$ 和$\Sigma_2$ 的输出跟踪误差$y-y_r$ Fig. 2 Output tracking errors$y-y_r$ of systems$\Sigma_1$ and$\Sigma_2$ 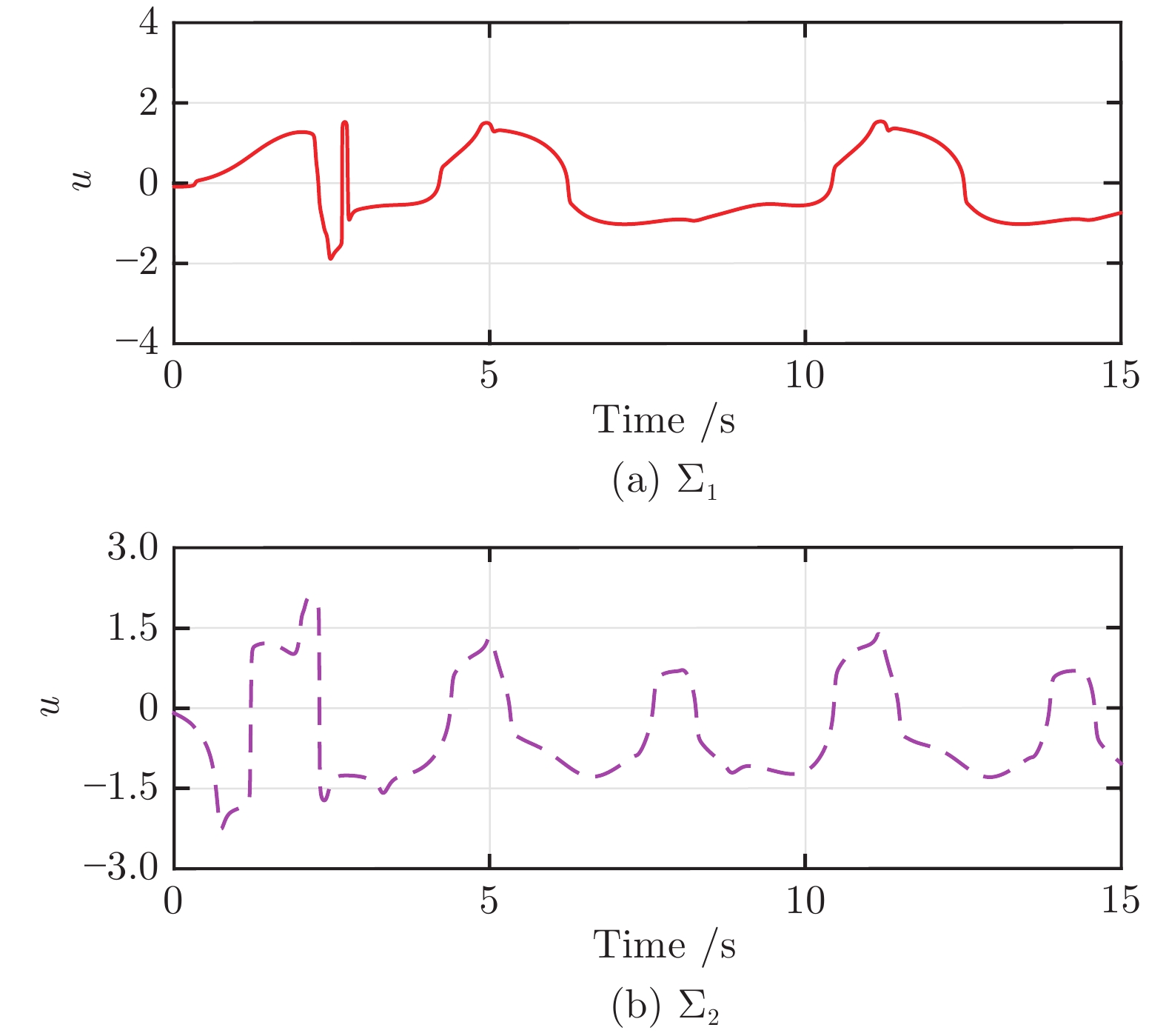 图 3 系统
图 3 系统$\Sigma_1$ 和$\Sigma_2$ 的控制信号$u$ Fig. 3 Control signals$u$ of systems$\Sigma_1$ and$\Sigma_2$  图 4 系统
图 4 系统$\Sigma_1$ 和$\Sigma_2$ 的自适应参数$\hat{\vartheta}_1$ 和$\ \hat{\vartheta}_2$ Fig. 4 Adaptive parameters$\hat{\vartheta}_1$ and$\hat{\vartheta}_2$ of systems$\Sigma_1$ and$\Sigma_2$ 为进一步验证本文控制算法的幂次无关特性, 在系统初始值与控制器参数不变的条件下, 对具有不同幂次
$ p_1 $ 和$ p_2 $ 的系统$ \Sigma_1 $ 进行仿真测试. 仿真结果如图5和图6所示. 图5为系统$ \Sigma_1 $ 在不同幂次$ p_1 $ 和$ p_2 $ 条件下的输出跟踪误差$ y-y_r $ , 图6为相应的控制信号$ u $ . 仿真结果表明, 在不同幂次条件下, 该控制器仍然可以保证闭环系统获得良好的控制性能. 图 5 系统
图 5 系统$\Sigma_1$ 在不同幂次下的跟踪误差$y-y_r$ Fig. 5 Output tracking errors$y-y_r$ of system$\Sigma_1$ under various powers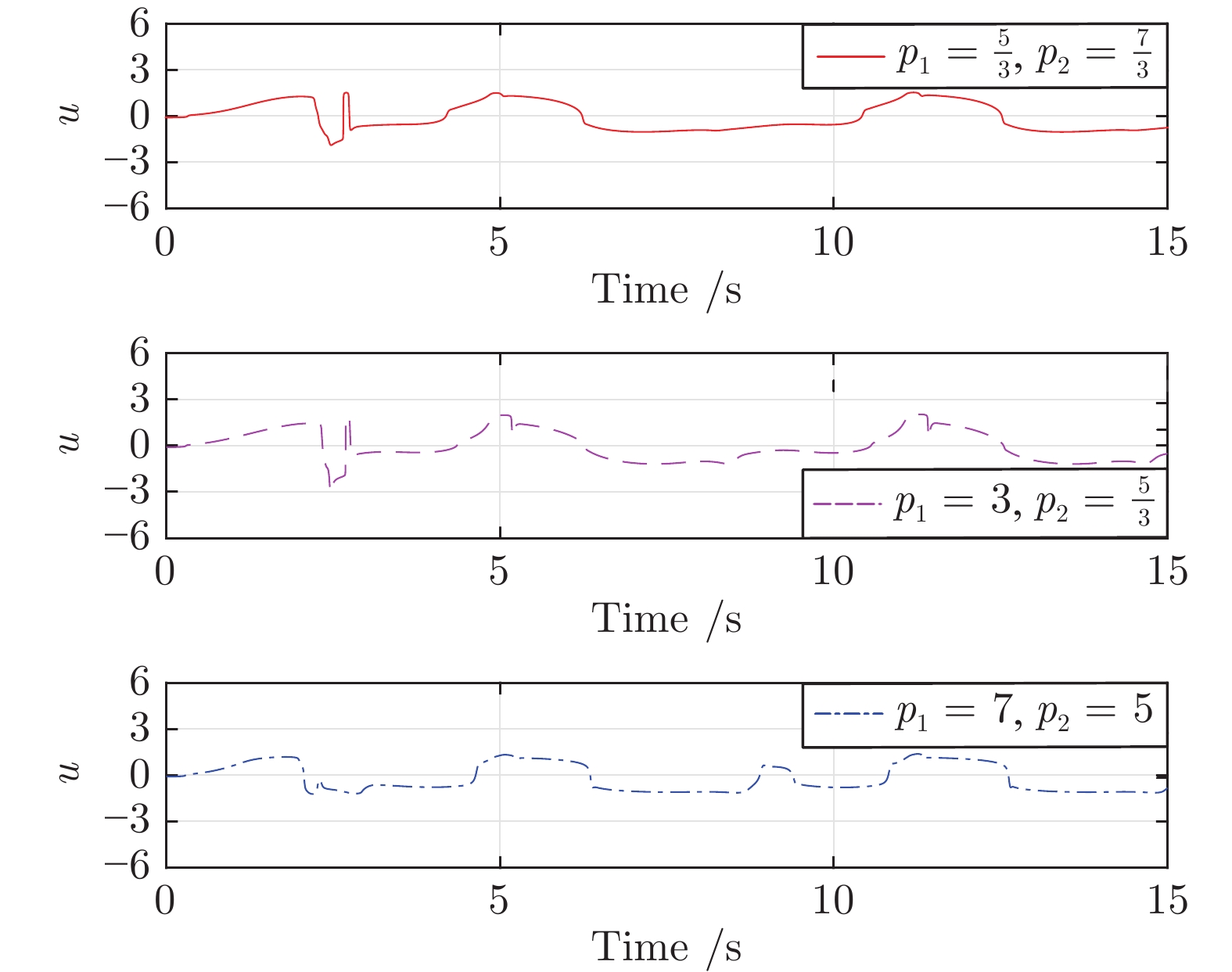 图 6 系统
图 6 系统$\Sigma_1$ 在不同幂次下的控制信号$u$ Fig. 6 Control signals$u$ of system$\Sigma_1$ under various powers4. 结束语
针对一类具有未知幂次的高阶不确定非线性系统, 提出了一种基于障碍李雅普诺夫函数的自适应控制算法. 在无需知晓系统函数先验知识的条件下, 所提控制算法有效克服了系统幂次未知与模型不确定带来的技术挑战. 该算法的显著特点是所设计的自适应控制器均与系统幂次无关. 最后, 仿真结果验证了本文控制算法的有效性与通用性.
今后的研究方向包括将本文所提方法推广到具有未知幂次的高阶非线性系统的输出反馈控制设计[34]. 此外, 为验证本文方法的实用性, 将本文所提控制策略应用于实际系统[35]亦是我们未来研究的目标.
-
[1] 袁世通. 1000 MW超超临界机组建模理论与方法的研究[博士学位论文], 华北电力大学, 中国, 2015Yuan Shi-Tong. Research on Modeling Theory and Method for 1000 MW Ultra Supercritical Unit[Ph. D. dissertation], North China Electric Power University, China, 2015 [2] Yin S, Luo H, Ding S X. Real-time implementation of fault-tolerant control systems with performance optimization. IEEE Transactions on Industrial Electronics, 2014, 61(5): 2402-2411 doi: 10.1109/TIE.2013.2273477 [3] Shamma J S, Athans M. Guaranteed properties of gain scheduled control for linear parameter-varying plants. Automatica, 1991, 27(3): 559-564 doi: 10.1016/0005-1098(91)90116-J [4] Chang H, Krieger A, Astolfi A, Pistikopoulos E N. Robust multi-parametric model predictive control for LPV systems with application to anaesthesia. Journal of Process Control, 2014, 24(10): 1538-1547 doi: 10.1016/j.jprocont.2014.07.005 [5] Toth R, Lyzell C, Enqvist M, Heuberger P S C, Van den Hof P M J. Order and structural dependence selection of LPV-ARX models using a nonnegative garrote approach. In: Proceedings of the 48h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference. Shanghai, China: IEEE, 2009. 7406-7411 [6] Lipták G, Luspay T, Péni T, Takarics B, Vanek B. LPV model reduction methods for aeroelastic structures. IFAC-PapersOnLine, 2017, 50(1): 6344-6349 doi: 10.1016/j.ifacol.2017.08.1015 [7] Wang D F, Yuan S T. Identification of LPV model for superheated steam temperature system using A-QPSO. Simulation Modelling Practice and Theory, 2016, 69: 1-13 doi: 10.1016/j.simpat.2016.08.009 [8] 杨宪强. 线性参数变化系统辨识方法研究[博士学位论文], 哈尔滨工业大学, 中国, 2014Yang Xian-Qiang. Identification of Linear Parameter Variation System[Ph. D. dissertation], Harbin Institute of Technology, China, 2014 [9] Laurain V, Gilson M, Tóth R, Garnier H. Refined instrumental variable methods for identification of LPV Box-Jenkins models. Automatica, 2010, 46(6): 959-967 doi: 10.1016/j.automatica.2010.02.026 [10] Yang X Q, Huang B, Zhao Y J, Lu Y J, Xiong W L, Gao H J. Generalized expectation-maximization approach to LPV process identification with randomly missing output data. Chemometrics and Intelligent Laboratory Systems, 2015, 148: 1-8 doi: 10.1016/j.chemolab.2015.08.013 [11] Wang Y, Bevly D M, Rajamani R. Interval observer design for LPV systems with parametric uncertainty. Automatica, 2015, 60(1): 79-85 http://www.sciencedirect.com/science/article/pii/s0005109815002770 [12] Schulz E, Cox P B, Toth R, Werner H. LPV state-space identification via IO methods and efficient model order reduction in comparison with subspace methods. In: Proceedings of the IEEE 56th Annual Conference on Decision and Control (CDC). Melbourne, Australia: IEEE, 2017. 3575-3581 [13] Felici F, van Wingerden J W, Verhaegen M. Subspace identification of MIMO LPV systems using a periodic scheduling sequence. Automatica, 2007, 43(10): 1684-1697 doi: 10.1016/j.automatica.2007.02.027 [14] Paijmans B, Symens W, van Brussel H, Swevers J. Identification of interpolating affine LPV models for mechatronic systems with one varying parameter. European Journal of Control, 2008, 14(1): 16-29 doi: 10.3166/ejc.14.16-29 [15] Goos J, Lataire J, Pintelon R. Estimation of linear parameter-varying affine state space models using synchronized periodic input and scheduling signals. In: Proceedings of the 2014 American Control Conference. Portland, USA: IEEE, 2014. 3754-3759 [16] Wassink M G, van de Wal M, Scherer C, Bosgra O. LPV control for a wafer stage: Beyond the theoretical solution. Control Engineering Practice, 2005, 13(2): 231-245 doi: 10.1016/j.conengprac.2004.03.008 [17] Marcos A, Balas G J. Development of linear-parameter-varying models for aircraft. Journal of Guidance Control Dynamics, 2004, 27(2): 218-228 doi: 10.2514/1.9165 [18] Mercére G, Palsson H, Poinot T. Continuous-time linear parameter-varying identification of a cross flow heat exchanger: A local approach. IEEE Transactions on Control Systems Technology, 2011, 19(1): 64-76 doi: 10.1109/TCST.2010.2071874 [19] Zhu Y C, Xu Z H. A method of LPV model identification for control. IFAC Proceedings Volumes, 2008, 41(2): 5018-5023 doi: 10.3182/20080706-5-KR-1001.00843 [20] Lei C, Tulsyan A, Huang B, Liu F. Multiple model approach to nonlinear system identification with an uncertain scheduling variable using EM algorithm. Journal of Process Control, 2013, 3(10): 1480-1496 http://www.sciencedirect.com/science/article/pii/S0959152413001820 [21] Chen L, Khatibisepehr S, Huang B, Liu F, Ding Y S. Nonlinear process identification in the presence of multiple correlated hidden scheduling variables with missing data. AIChE Journal, 2015, 61(10): 3270-3287 doi: 10.1002/aic.14866 [22] Xu Z H, Zhao J, Qian J X, Zhu Y C. Nonlinear MPC using an identified LPV model. Industrial & Engineering Chemistry Research, 2009, 48(6): 3043-3051 doi: 10.1021/ie801057q [23] Toth R, Abbas H S, Werner H. On the state-space realization of LPV input-output models: Practical approaches. IEEE Transactions on Control Systems Technology, 2012, 20(1): 139-153 http://ieeexplore.ieee.org/document/5714737 [24] Duarte R F M, Pool D M, van Paassen M M, Mulder M. Experimental scheduling functions for global LPV human controller modeling. IFAC-PapersOnLine, 2017, 50(1): 15853-15858 doi: 10.1016/j.ifacol.2017.08.2329 [25] De Caigny J, Pintelon R, Camino J F, Swevers J. Interpolated modeling of LPV systems. IEEE Transactions on Control Systems Technology, 2014, 22(6): 2232-2246 doi: 10.1109/TCST.2014.2300510 [26] Bamieh B, Giarre L. Identification of linear parameter varying models. In: Proceedings of the 38th IEEE Conference on Decision and Control. Phoenix, USA: IEEE, 1999. 1505-1510 [27] Bamieh B, Giarré L. Identification of linear parameter varying models. International Journal of Robust and Nonlinear Control, 2002, 12(9): 841-853 doi: 10.1002/rnc.706 [28] Zhao Y, Huang B, Su H Y, Chu J. Prediction error method for identification of LPV models. Journal of Process Control, 2012, 22(1): 180-193 doi: 10.1016/j.jprocont.2011.09.004 [29] Golabi A, Meskin N, Tóth R, Mohammadpour J. A Bayesian approach for LPV model identification and its application to complex processes. IEEE Transactions on Control Systems Technology, 2017, 25(6): 2160-2167 doi: 10.1109/TCST.2016.2642159 [30] van Wingerden J W, Verhaegen M. Subspace identification of Bilinear and LPV systems for open- and closed-loop data. Automatica, 2009, 45(2): 372-381 doi: 10.1016/j.automatica.2008.08.015 [31] Cerone V, Piga D, Regruto D. Convex relaxation techniques for set-membership identification of LPV systems. In: Proceedings of the 2011 American Control Conference. San Francisco, USA: IEEE, 2011. 171-176 [32] 王红茹. 动态系统的鲁棒故障检测与分离方法研究[博士学位论文], 哈尔滨工业大学, 中国, 2006Wang Hong-Ru. Study on Robust Fault Detection and Isolation for Dynamic Systems[Ph. D. dissertation], Harbin Institute of Technology, China, 2006 [33] Jin X, Huang B, Shook D S. Multiple model LPV approach to nonlinear process identification with EM algorithm. Journal of Process Control, 2011, 21(1): 182-193 doi: 10.1016/j.jprocont.2010.11.008 [34] Yang X Q, Huang B, Gao H J. A direct maximum likelihood optimization approach to identification of LPV time-delay systems. Journal of the Franklin Institute, 2016, 353(8): 1862-1881 doi: 10.1016/j.jfranklin.2016.03.005 [35] Gopaluni R B. A particle filter approach to identification of nonlinear processes under missing observations. Canadian Journal of Chemical, 2008, 86(6): 1081-1092 doi: 10.1002/cjce.20113 [36] Deng J, Huang B. Identification of nonlinear parameter varying systems with missing output data. AIChE Journal, 2012, 58(11): 3454-3467 doi: 10.1002/aic.13735 [37] Liu X, Wang Z Y, Yang X Q. EM-based global identification of LPV ARX models with a noisy scheduling variable. In: Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society. Beijing, China: IEEE, 2017. 6875-6880 [38] Yang X Q, Yang X B. Local identification of LPV dual-rate system with random measurement delays. IEEE Transactions on Industrial Electronics, 2018, 65(2): 1499-1507 doi: 10.1109/TIE.2017.2733465 [39] Yan W G, Zhu Y C, Zhu L Y, Liu X. Identification of systems with slowly sampled outputs using LPV model. Computers & Chemical Engineering, 2018, 112: 316-330 http://www.sciencedirect.com/science/article/pii/S0098135418300899 [40] Hooshmandi K, Bayat F, Jahed-Motlagh M R, Jalali A A. Robust sampled-data control of non-linear LPV systems: Time-dependent functional approach. IET Control Theory & Applications, 2018, 12(9): 1318-1331 doi: 10.1049/iet-cta.2017.0980 [41] Sun W C, Zhao Y, Li J F, Zhang L X, Gao H J. Active suspension control with frequency band constraints and actuator input delay. IEEE Transactions on Industrial Electronics, 2012, 59(1): 530-537 doi: 10.1109/TIE.2011.2134057 [42] Ferdowsi H, Jagannathan S, Zawodniok M. An online outlier identification and removal scheme for improving fault detection performance. IEEE Transactions on Neural Networks and Learning Systems, 2014, 5(5): 908-919 http://ieeexplore.ieee.org/document/6658905 [43] Yang X Q, Lu Y J, Yan Z B. Robust global identification of linear parameter varying systems with generalised expectation - maximisation algorithm. IET Control Theory & Applications, 2015, 9(7): 1103-1110 http://ieeexplore.ieee.org/document/7101008/references [44] Yang X Q, Sun H, Bai L F, Liu X. Identification of linear parameter varying system with dual-rate sampled data and uncertain measurement delay. In: Proceedings of the IEEE 25th International Symposium on Industrial Electronics (ISIE). Santa Clara, USA: IEEE, 2016. 95-99 [45] Apkarian P, Gahinet P, Becker G. Self-scheduled $H_{\infty}$ linear parameter-varying systems. In: Proceedings of the 1994 American Control Conference. Baltimore, USA: IEEE, 1994. 856-860 [46] Bianchi F D, Kunusch C, Ocampo-Martinez C, Sánchez-Peña R S. A gain-scheduled LPV control for oxygen stoichiometry regulation in PEM Fuel Cell systems. IEEE Transactions on Control Systems Technology, 2014, 22(5): 1837-1844 doi: 10.1109/TCST.2013.2288992 [47] Dabiri A, Kulcsár B, Köroǧlu H. Distributed LPV state-feedback control under control input saturation. IEEE Transactions on Automatic Control, 2017, 62(5): 2450-2456 doi: 10.1109/TAC.2016.2598967 [48] Wang J L, Wang C H, Li Y H, Gao H J. Novel $l_2-l_{\infty}$ controller design for LPV discrete time-delay systems. Systems Engineering and Electronics, 2005, 16(1): 128-133 [49] Robert D, Sename O, Simon D. An $H_{\infty}$ LPV design for sampling varying controllers: Experimentation with a T-Inverted pendulum. IEEE Transactions on Control Systems Technology, 2010, 18(3): 741-749 doi: 10.1109/TCST.2009.2026179 [50] 姜伟, 王宏力, 陆敬辉, 秦伟伟, 蔡光斌. 连续时间多胞线性变参数系统变增益$H_{\infty}$/$H_2$输出反馈控制. 控制理论与应用, 2016, 33(9): 1225-1235 https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201810004.htmJiang Wei, Wang Hong-Li, Lu Jing-Hui, Qin Wei-Wei, Cai Guang-Bin. Gain-scheduled $H_{\infty}$/$H_2$ output feedback controller synthesis for continuous-time polytopic linear parameter varying systems. Control Theory & Applications, 2016, 33(9): 1225-1235 https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201810004.htm [51] Jabali M B A, Kazemi M H. A new polytopic modeling with uncertain vertices and robust control of robot manipulators. Journal of Control, Automation and Electrical Systems, 2017, 28(8): 349-357 doi: 10.1007/s40313-017-0309-z [52] 黄金杰, 潘晓真. 多胞LPV模型的Buck变换器鲁棒增益调度控制. 电机与控制学报, 2018, 22(1): 93-99 https://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201801014.htmHuang Jin-Jie, Pan Xiao-Zhen. Robust gain scheduling control for Buck converter based on polytopic LPV model. Electric Machines and Control, 2018, 22(1): 93-99 https://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201801014.htm [53] Lim S. Analysis and control of linear parameter varying systems. Dissertation Abstracts International, 1998, 60(4): 1718-1720 [54] Xie J, Zhao J. Model reference adaptive control for switched LPV systems and its application. IET Control Theory & Applications, 2016, 10(17): 2204-2212 http://ieeexplore.ieee.org/document/7740213/ [55] Huang Y Q, Sun C Y, Qian C S, Wang L. Non-fragile switching tracking control for a flexible air-breathing hypersonic vehicle based on polytopic LPV model. Chinese Journal of Aeronautics, 2013, 26(4): 948-959 doi: 10.1016/j.cja.2013.04.036 [56] Zhu K W, Zhao J, Dimirovski G M. $H_{\infty}$ tracking control for switched LPV systems with an application to aero-engines. IEEE/CAA Journal of Automatica Sinica, 2018, 5(3): 699-705 doi: 10.1109/JAS.2016.7510025 [57] Cao Y Y, Lin Z L. Min-max MPC algorithm for LPV systems subject to input saturation. IEE Proceedings-Control Theory and Applications, 2005, 152(3): 266-272 doi: 10.1049/ip-cta:20041314 [58] Casavola A, Famularo D, Franzé G, Garone E. An off-line MPC scheme for discrete-time linear parameter varying systems. In: Proceedings of the 2009 European Control Conference (ECC). Budapest, Hungary: IEEE, 2015. 23-26 [59] Abbas H S, Tóth R, Meskin N, Mohammadpour J, Hanema J. A robust MPC for input-output LPV models. IEEE Transactions on Automatic Control, 2016, 61(12): 4183-4188 doi: 10.1109/TAC.2016.2553143 [60] Li D W, Xi Y G. The feedback robust MPC for LPV systems with bounded rates of parameter changes. IEEE Transactions on Automatic Control, 2010, 55(2): 503-507 doi: 10.1109/TAC.2009.2037464 [61] Rotondo D, Puig V, Nejjari F, Witczak M. Automated generation and comparison of Takagi-Sugeno and polytopic quasi-LPV models. Fuzzy Sets and Systems, 2015, 277: 44-64 doi: 10.1016/j.fss.2015.02.002 [62] Wu H M, Tafreshi R. Air-fuel ratio control of lean-burn SI engines using the LPV-based fuzzy technique. IET Control Theory & Applications, 2018, 12(10): 1414-1420 http://ieeexplore.ieee.org/document/8375212/ [63] Hu Y, Liu J Z, Lin Z W. LPV T-S fuzzy gain scheduling control of WTGS below rated wind speed. In: Proceedings of the 26th Control and Decision Conference (2014 CCDC). Changsha, China: IEEE, 2014. 3328-3333 [64] 崔平. LPV系统的鲁棒故障估计与主动容错控制[博士学位论文], 上海交通大学, 中国, 2008Cui Ping. Robust Fault Estimation and Active Fault Tolerant Control for Linear Parameter Varying Systems[Ph. D. dissertation], Shanghai Jiao Tong University, China, 2008 [65] Houimli R, Bedioui N, Besbes M. An improved polytopic adaptive LPV observer design under actuator fault. International Journal of Control, Automation and Systems, 2018, 16(1): 168-180 doi: 10.1007/s12555-016-0504-x [66] Nguyen M Q, Sename O, Dugard L. An LPV fault tolerant control for semi-active suspension - scheduled by fault estimation. IFAC-PapersOnLine, 2015, 48(21): 42-47 doi: 10.1016/j.ifacol.2015.09.502 [67] 李文强, 马建军, 李鹏, 郑志强. 基于LPV的变增益控制技术及其在航空航天领域的应用. 航空兵器, 2009, (2): 8-12, 17 doi: 10.3969/j.issn.1673-5048.2009.02.002Li Wen-Qiang, Ma Jian-Jun, Li Peng, Zheng Zhi-Qiang. Variable gain control based on LPV and the application in Aerospace. Aero Weaponry, 2009, (2): 8-12, 17 doi: 10.3969/j.issn.1673-5048.2009.02.002 [68] 赵兴锋. 飞行控制律鲁棒性分析研究与实现[博士学位论文], 国防科学技术大学, 中国, 2014Zhao Xing-Feng. Research and Realization on Robustness Analysis of Flight Control Laws[Ph. D. dissertation], National University of Defense Technology, China, 2014 [69] 贺跃帮. 小型无人直升机鲁棒非线性控制研究[博士学位论文], 华南理工大学, 中国, 2013He Yue-Bang. Research on Robust Nonlinear Control for Small-Scale Unmanned Helicopter[Ph. D. dissertation], South China University of Technology, China, 2013 [70] 杨贯通. 变外形飞行器建模与控制方法研究[博士学位论文], 北京理工大学, 中国, 2015Yang Guan-Tong. Research on Modeling and Control of Morphing Flight Vehicles[Ph. D. dissertation], Beijing Institute of Technology, China, 2015 [71] 白瑜亮. 多介质环境下潜射导弹动力学及非线性控制方法研究[博士学位论文], 哈尔滨工业大学, 中国, 2013Bai Yu-Liang. Research on the Dynamics and Nonlinear Control of the Submarine-Launched Missile in Multimedia Environment[Ph. D. dissertation], Harbin Institute of Technology, China, 2013 [72] Tan W, Packard A K, Balas G J. Quasi-LPV modeling and LPV control of a generic missile. In: Proceedings of the 2000 American Control Conference. Chicago, USA: IEEE, 2000. 3692-3696 [73] Li S Q, Zhang S X. A modified LPV modeling technique for turbofan engine control system. In: Proceedings of the 2010 International Conference on Computer Application and System Modeling (ICCASM 2010). Taiyuan, China: IEEE, 2010. 99-102 [74] 逢洪军. 高超声速飞行器气动弹性建模与鲁棒变增益控制[博士学位论文], 哈尔滨工业大学, 中国, 2015Pang Hong-Jun. Aeroelasticity Modeling and Robust Gain-Scheduling Control of Hypersonic Vehicle[Ph. D. dissertation], Harbin Institute of Technology, China, 2015 [75] 邵朋院. 大尺度变参数无人机鲁棒变增益控制方法研究[博士学位论文], 西北工业大学, 中国, 2016Shao Peng-Yuan. Robust Gain-Scheduling Control of UAV with Parameter Varying in Large Scale[Ph. D. dissertation], Northwestern Polytechnical University, China, 2016 [76] Bianchi F D, Battista H D, Mantz R J. Robust multivariable gain-scheduled control of wind turbines for variable power production. International Journal of Systems Control, 2010, 1(3): 103-112 http://www.researchgate.net/publication/260098958_Robust_multivariable_gain-scheduled_control_of_wind_turbines_for_variable_power_production [77] Ruiz F, Vuelvas J, Novara C. LPV model identification for a web winding system. IFAC Proceedings Volumes, 2012, 45(16): 1779-1784 doi: 10.3182/20120711-3-BE-2027.00341 [78] Shi F M, Patton R. An active fault tolerant control approach to an offshore wind turbine model. Renewable Energy, 2015, 75: 788-798 doi: 10.1016/j.renene.2014.10.061 [79] Inthamoussou F A, De Battista H, Mantz R J. LPV-based active power control of wind turbines covering the complete wind speed range. Renewable Energy, 2016, 99: 996-1007 doi: 10.1016/j.renene.2016.07.064 [80] Castro R S, Salton A T, Flores J V, Kinnaert M, Coutinho D F. Variable frequency resonant controller for load reduction in wind turbines. Control Engineering Practice, 2017, 66: 76-88 doi: 10.1016/j.conengprac.2017.06.007 [81] Schaab K, Hahn J, Wolkov M, Stursberg O. Robust control for voltage and transient stability of power grids relying on wind power. Control Engineering Practice, 2017, 60: 7-17 doi: 10.1016/j.conengprac.2016.12.003 [82] Tong X, Zhao X W. Power generation control of a monopile hydrostatic wind turbine using an $H_{\infty}$ loop-shaping torque controller and an LPV Pitch controller. IEEE Transactions on Control Systems Technology, 2018, 26(6): 2165-2172 doi: 10.1109/TCST.2017.2749562 [83] van der Veen G, van Wingerden J W, Verhaegen M. Global identification of wind turbines using a hammerstein identification method. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1471-1478 doi: 10.1109/TCST.2012.2205929 [84] Ali H S, Darouach M, Zasadzinski M, Alma M. An $H_{\infty}$ LPV control for a class of LPV systems using a descriptor approach: Application to a wind turbine mode. IFAC-PapersOnLine, 2015, 48(26): 213-217 doi: 10.1016/j.ifacol.2015.11.139 [85] 胡阳. 基于T-S模糊线性化的风力发电系统增益调度控制研究[博士学位论文], 华北电力大学, 中国, 2015Hu Yang. Research on Gain Scheduling Control of Wind Turbine Generation System based on T-S Fuzzy Linearization[Ph. D. dissertation], North China Electric Power University, China, 2015 [86] Liu Q, Vittal V, Elia N. Expansion of system operating range by an interpolated LPV FACTS controller Using multiple Lyapunov functions. IEEE Transactions on Power Systems, 2006, 21(3): 1311-1320 doi: 10.1109/TPWRS.2006.876688 [87] He R, Liu K Z, Mei S W. LPV modelling and gain-scheduled control approach for the transient stabilization of power systems. IEEJ Transactions on Electrical and Electronic Engineering, 2010, 5(1): 87-95 doi: 10.1002/tee.20498 [88] Schaab K, Stursberg O. Decentralized robust control of power grids using LPV-models of DAE-systems. IFAC-PapersOnLine, 2015, 48(26): 218-223 doi: 10.1016/j.ifacol.2015.11.140 [89] Jabali M B A, Kazemi M H. A new LPV modeling approach using PCA-based parameter set mapping to design a PSS. Journal of Advanced Research, 2017, 8(1): 23-32 doi: 10.1016/j.jare.2016.10.006 [90] Fergani S, Sename O, Dugard L. An LPV/$H_{\infty}$ integrated vehicle dynamic controller. IEEE Transactions on Vehicular Technology, 2016, 65(4): 1880-1889 doi: 10.1109/TVT.2015.2425299 [91] Ifqir S, Oufroukh N A, Ichalal D, Mammar S. Interval observer for LPV systems: Application to vehicle lateral dynamics. IFAC-PapersOnLine, 2017, 50(1): 7572-7577 doi: 10.1016/j.ifacol.2017.08.995 [92] Nguyen A T, Chevrel P, Claveau F. On the effective use of vehicle sensors for automatic lane keeping via LPV static output feedback control. IFAC-PapersOnLine, 2017, 50(1): 13808-13815 doi: 10.1016/j.ifacol.2017.08.2072 [93] Jia F J, Liu Z Y. A LPV traction control approach for independent in-wheel electric motor vehicle. In: Proceedings of the 11th World Congress on Intelligent Control and Automation. Shenyang, China: IEEE, 2014. 1992-1997 [94] Kang C M, Lee S H, Chung C C. Discrete-time LPV $H_2$ observer with nonlinear bounded varying parameter and its application to the vehicle state observer. IEEE Transactions on Industrial Electronics, 2018, 65(11): 8768-8777 doi: 10.1109/TIE.2018.2813961 [95] Yang S, Sultan C. LPV control of a tensegrity-membrane system. Mechanical Systems and Signal Processing, 2017, 95: 397-424 doi: 10.1016/j.ymssp.2017.03.027 [96] Fleps-Dezasse M, Bünte T, Svaricek F, Brembeck J. LPV feedforward control of semi-active suspensions for improved roll stability. Control Engineering Practice, 2018, 78(1): 1-11 http://www.sciencedirect.com/science/article/pii/S0967066118301394 [97] Alaridh I, Aitouche A, Zemouche A, Boulkroune B. LPV unknown input observer for vehiclelateral dynamics. In: Proceedings of the 17th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA). Sousse, Tunisia: IEEE, 2016. 187-192 [98] 王刚. 电动汽车悬架系统主动控制策略研究[博士学位论文], 沈阳工业大学, 中国, 2017Wang Gang. Study on Active Control Strategy for Suspension Systems of Electric Vehicle[Ph. D. dissertation], Shenyang University of Technology, China, 2017 [99] 张荣芸. 基于EPS/ESP的汽车横向运动稳定性及其混沌控制研究[博士学位论文], 合肥工业大学, 中国, 2015Zhang Rong-Yun. Research on the Stability of the Automobile Lateral Motion and Its Chaos Control Based on EPS/ESP[Ph. D. dissertation], Hefei University of Technology, China, 2015 [100] 张勇超. 车辆电磁主动悬架鲁棒控制研究[博士学位论文], 上海交通大学, 中国, 2012Zhang Yong-Chao. Study on Robust Control for Vehicle Active Electromagnetic Suspension[Ph. D. dissertation], Shanghai Jiao Tong University, China, 2012 [101] Alcala E, Puig V, Quevedo J, Escobet T, Comasolivas R. Autonomous vehicle control using a kinematic Lyapunov-based technique with LQR-LMI tuning. Control Engineering Practice, 2018, 73: 1-12 doi: 10.1016/j.conengprac.2017.12.004 [102] Cauet S, Coirault P, Njeh M. Diesel engine torque ripple reduction through LPV control in hybrid electric vehicle powertrain: Experimental results. Control Engineering Practice, 2013, 21(12): 1830-1840 doi: 10.1016/j.conengprac.2013.03.005 [103] Bosche J, Rabhi A, El Hajjaji A. A robust stabilization method for a saturated LPV system: Application to the lateral dynamics of vehicles. IFAC-PapersOnLine, 2017, 50(1): 3732-3737 doi: 10.1016/j.ifacol.2017.08.571 [104] Bachnas A A, Tóth R, Ludlage J H A, Mesbah A. A review on data-driven linear parameter-varying modeling approaches: A high-purity distillation column case study. Journal of Process Control, 2014, 24(4): 272-285 doi: 10.1016/j.jprocont.2014.01.015 [105] Prempain E, Postlethwaite I, Benchaib A. A linear parameter variant $H_{\infty}$ control design for an induction motor. Control Engineering Practice, 2002, 10(6): 633-644 doi: 10.1016/S0967-0661(02)00024-2 [106] Lu B, Choi H, Buckner G D, Tammi K. Linear parameter-varying techniques for control of a magnetic bearing system. Control Engineering Practice, 2008, 16(10): 1161-1172 doi: 10.1016/j.conengprac.2008.01.002 [107] Wijnheijmer F, Naus G, Post W, Steinbuch M, Teerhuis P. Modelling and LPV control of an electro-hydraulic servo system. In: Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control. Munich, Germany: IEEE, 2006. 3116-3121 [108] 袁士春. 船舶运动与主推进线性变参数联合控制的研究[博士学位论文], 大连海事大学, 中国, 2007Yuan Shi-Chun. A Study on the Integrated Control of Ship Motion and Main Propulsion Using Linear Parameter-varying[Ph. D. dissertation], Dalian Maritime University, China, 2007 [109] 林明明. 低温余热发电过程建模与先进控制策略研究[博士学位论文], 华北电力大学(北京), 中国, 2016Lin Ming-Ming. Research on Modeling and Advanced Control for Low Temperature Waste Heat Power Generation Process[Ph. D. dissertation], North China Electric Power University (Beijing), China, 2016 期刊类型引用(9)
1. 尹宏伟,杭雨晴,胡文军. 融合异常检测与区域分割的高效K-means聚类算法. 郑州大学学报(工学版). 2024(03): 80-88 .  百度学术
百度学术2. 黄鹤,黄佳慧,刘国权,王会峰,高涛. 采用混合策略联合优化的模糊C-均值聚类信息熵点云简化算法. 西安交通大学学报. 2024(07): 214-226 . 百度学术3. 高瑞贞,王诗浩,王皓乾,张京军,李志杰. 基于图注意力机制的三维点云感知. 中国测试. 2024(07): 155-162 . 百度学术4. 邢建平,殷煜昊. 基于三维重建外点剔除的船舶航迹自适应修正. 舰船科学技术. 2024(14): 162-165 . 百度学术5. 梁循,李志莹,蒋洪迅. 基于图的点云研究综述. 计算机研究与发展. 2024(11): 2870-2896 . 百度学术6. 黄鹤,温夏露,杨澜,王会峰,高涛,茹锋. 基于疯狂捕猎秃鹰算法的K均值互补迭代聚类优化. 浙江大学学报(工学版). 2023(11): 2147-2159 . 百度学术7. 胡建平,刘凯,郭新宇,吴升,温维亮. 自适应加权算子结合主曲线提取玉米叶片点云骨架. 农业工程学报. 2022(02): 166-174 . 百度学术8. 任彪,陆玲. 基于PCL三维点云花瓣分割与重建. 现代电子技术. 2022(12): 149-154 . 百度学术9. 吴艳娟,王健,王云亮. 基于骨架提取算法的作物茎秆识别与定位方法. 农业机械学报. 2022(11): 334-340 . 百度学术其他类型引用(15)
-






































































































 下载:
下载:











































































































































































































































计量
- 文章访问数: 1515
- HTML全文浏览量: 1372
- PDF下载量: 672
- 被引次数: 24
 下载:
下载:
