

-
摘要: 针对不确定机械系统中普遍存在的摩擦力,由于其非线性和不确定性,传统基于摩擦模型的补偿控制方法难以达到满意的系统性能要求.本文提出基于自适应区间二型(Type-2)模糊逻辑系统对系统摩擦进行补偿建模,并在该摩擦补偿方法的基础上设计出鲁棒自适应控制器,保证系统输出精度,且对摩擦环境的变化具有较强自适应性.区间二型模糊逻辑系统相对于传统一型模糊逻辑系统具有较强的处理不确定性问题的能力,在本文中使用自适应区间二型模糊逻辑系统不断逼近摩擦力,根据李雅普诺夫稳定性理论求出自适应律并证明系统跟踪误差的有界性.在不同摩擦环境下的仿真结果验证了本文所提摩擦建模方法与控制策略的有效性与实用性.Abstract: Due to the nonlinearity and uncertainty of friction in uncertain mechanical systems, it is difficult to establish an accurate friction model. The traditional compensation control method based on friction model is difficult to meet the requirements of system performance. The adaptive interval Type-2 fuzzy logic system is proposed to model system friction, then the robust adaptive controller is designed on the basis of the friction compensation method, which ensures the output precision of the system and has strong adaptability to variational environment. Interval Type-2 fuzzy logic system has stronger ability to deal with the uncertainty problem than the traditional Type-1 fuzzy logic system, so the adaptive interval Type-2 fuzzy logic system is used to approximate friction. The adaptive law is derived and the boundedness of the tracking error is proved based on the Lyapunov stability theory. The effectiveness and practicability of the friction modeling method and control strategy are verified by simulations under different friction environments.
-
Key words:
- Nonlinear friction /
- interval Type-2 fuzzy /
- Lyapunov stability /
- adaptability
1) 第29届中国过程控制会议(CPCC2018)推荐论文
本文责任编委 魏庆来 -
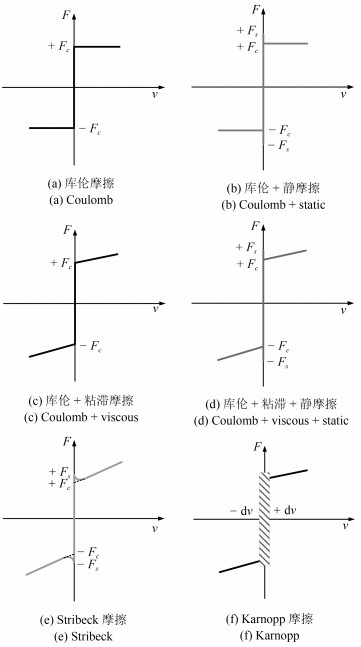
表 1 摩擦模型参数与结构
Table 1 Friction model parameters and structures
仿真环境 摩擦模型Ff(t/s) 0<t≤20 20<t≤40 40<t≤60 环境1 Stribeck Stribeck Stribeck Fc=0.40FN Fc=0.30FN Fc=0.20FN Fs=0.60FN Fs=0.50FN Fs=0.40FN 环境2 Stribeck Stribeck Coulomb Fc=0.40FN Fc=0.30FN Fc=0.20FN Fs=0.60FN Fs=0.50FN  下载: 导出CSV
下载: 导出CSV
-
[1] Bisoffi A, Lio M D, Teel A R, Zaccarian L. Global asymptotic stability of a PID control system with coulomb friction. IEEE Transactions on Automatic Control, 2018, 63(8):2654-2661 doi: 10.1109/TAC.2017.2774443 [2] Kim S. Moment of inertia and friction torque coefficient identification in a servo drive system. IEEE Transactions on Industrial Electronics, 2019, 66(1):60-70 doi: 10.1109/TIE.41 [3] 刘强, 尔联洁, 刘金琨.参数不确定机械伺服系统的鲁棒非线性摩擦补偿控制.自动化学报, 2003, 29(4):628-632 http://www.aas.net.cn/CN/abstract/abstract13916.shtmlLiu Qiang, Er Lian-Jie, Liu Jin-Kun. Robust nonlinear friction compensation of mechanical servo system with time variable parameters. Acta Automatica Sinica, 2003, 29(4):628-632 http://www.aas.net.cn/CN/abstract/abstract13916.shtml [4] 丛爽, De Carli Alessandro.两种补偿动态摩擦力的先进控制策略.自动化学报, 1998, 24(2):236-240 http://www.aas.net.cn/CN/abstract/abstract16891.shtmlCong Shuang, De Carli-Alessandro. Two advanced control strategies for dynamic friction compensation. Acta Automatica Sinica, 1998, 24(2):236-240 http://www.aas.net.cn/CN/abstract/abstract16891.shtml [5] Verbert K A J, Toth R, Babuska R. Adaptive friction compensation:a globally stable approach. IEEE/ASME Transactions on Mechatronics, 2016, 21(1):351-363 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0234015635/ [6] Roy R, Wang L, Simaan N. Modeling and estimation of friction, extension, and coupling effects in multisegment continuum robots. IEEE/ASME Transactions on Mechatronics, 2017, 22(2):909-920 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7a4445d072724a96787132c1742ba9a7 [7] Armstrong-Helouvry B, Dupont P, Wit C C D. A survey of models, analysis tools and compensation methods for the control of machines with friction. Automatica, 1994, 30(7):1083-1138 doi: 10.1016/0005-1098(94)90209-7 [8] 何睿, 吴坚, 高吉.汽车电动助力制动系统摩擦建模与补偿控制.汽车工程, 2017, 39(6):683-688 http://d.old.wanfangdata.com.cn/Periodical/qcgc201706012He Rui, Wu Jian, Gao Ji. Modeling and compensation control for friction in vehicle power assisted braking system, Automotive Engineering, 2017, 39(6):683-688 http://d.old.wanfangdata.com.cn/Periodical/qcgc201706012 [9] Cui P L, Zhang D C, Yang S, Li H T. Friction compensation based on time delay control and internal model control for gimbal system in MSCMG. IEEE Transactions on Industrial Electronics, 2017, 64(5):3798-3807 doi: 10.1109/TIE.2016.2644620 [10] Yang H J, Sun J H, Xia Y Q, Zhao L. Position control for magnetic rodless cylinders with strong static friction. IEEE Transactions on Industrial Electronics, 2018, 65(7):5806-5815 doi: 10.1109/TIE.2017.2782198 [11] 王永富, 王殿辉, 柴天佑.基于数据挖掘与系统理论建立摩擦模糊模型与控制补偿.自动化学报, 2010, 36(3):412-420 http://www.aas.net.cn/CN/abstract/abstract13682.shtmlWang Yong-Fu, Wang Dian-Hui, Chai Tian-You. Data mining and systems theory based fuzzy modeling and control compensation for friction. Acta Automatica Sinica, 2010, 36(3):412-420 http://www.aas.net.cn/CN/abstract/abstract13682.shtml [12] 王永富, 王殿辉, 柴天佑.基于状态估计的摩擦模糊建模与鲁棒自适应控制.自动化学报, 2011, 37(2):245-252 http://www.aas.net.cn/CN/abstract/abstract17430.shtmlWang Yong-Fu, Wang Dian-Hui, Chai Tian-You. State estimate-based friction fuzzy modeling and robust adaptive control. Acta Automatica Sinica, 2011, 37(2):245-252 http://www.aas.net.cn/CN/abstract/abstract17430.shtml [13] Zhong G L, Shao Z Z, Deng H, Ren J L. Precise position synchronous control for multi-axis servo systems. IEEE Transactions on Industrial Electronics, 2017, 64(5):3707-3717 doi: 10.1109/TIE.2017.2652343 [14] Zadeh L A. The Concept of a Linguistic Variable and its Application to Approximate Reasoning-I. Information Sciences, 1975, 8(3):199-249 doi: 10.1016/0020-0255(75)90036-5 [15] 王飞跃, 莫红.关于二型模糊集合的一些基本问题.自动化学报, 2017, 43(16):1114-1141 http://www.aas.net.cn/CN/abstract/abstract19087.shtmlWang Fei-Yue, Mo Hong. Some fundamental issues on type-2 fuzzy sets. Acta Automatica Sinica, 2017, 43(16):1114-1141 http://www.aas.net.cn/CN/abstract/abstract19087.shtml [16] Wang Jia-Jun. A new type of fuzzy membership function designed for interval type-2 fuzzy neural network. Acta Automatica Sinica, 2017, 43(8):1425-1433 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdhxb201708014 [17] 莫红, 王飞跃, 肖志权, 陈茜.基于区间二型模糊集合的语言动力系统稳定性.自动化学报, 2011, 37(8):1018-1024 http://www.aas.net.cn/CN/abstract/abstract17522.shtmlMo Hong, Wang Fei-Yue, Xiao Zhi-Quan, Chen Qian.Stabilities of linguistic dynamic systems based on interval type-2 fuzzy sets. Acta Automatica Sinica, 2011, 37(8):1018-1024 http://www.aas.net.cn/CN/abstract/abstract17522.shtml [18] Mo Hong, Wang Fei-Yue, Zhou Min, Li R M, Xiao Z Q. Footprint of uncertainty for type-2 fuzzy sets. Information Sciences, 2014, 272:96-110 doi: 10.1016/j.ins.2014.02.092 [19] Mendel J M. On KM Algorithms for solving type-2 fuzzy set problems. IEEE Transactions on Fuzzy Systems, 2013, 21(3):426-446 doi: 10.1109/TFUZZ.2012.2227488 [20] Mendel J M. General type-2 fuzzy logic systems made simple:a tutorial. IEEE Transactions on Fuzzy Systems, 2014, 22(5):1162-1182 doi: 10.1109/TFUZZ.2013.2286414 [21] 李润梅, 梁秋鸿.基于区间二型模糊集合的人工交通系统可信度评估.自动化学报, DOI: 10.16383/j.aas.c180105Li Run-Mei, Wang Qiu-Hong. Artiflcial traffic system credibility evaluation based on interval type-2 fuzzy sets. Acta Automatica Sinica, DOI: 10.16383/j.aas.c180105 [22] 唐晓铭, 邓梨, 虞继敏, 屈洪春.基于区间二型T-S模糊模型的网络控制系统的输出反馈预测控制.自动化学报, DOI: 10.16383/j.aas.c170554Tang Xiao-Ming, Deng Li, Yu Ji-Min, Qu Hong-Chun. Output feedback model predictive control for interval type-2 T-S fuzzy networked control systems with bounded sisturbance. Acta Automatica Sinica, DOI: 10.16383/j.aas.c170554 [23] 丁千, 翟红梅.机械系统摩擦动力学研究进展.力学进展, 2013, 43(1):112-131 http://d.old.wanfangdata.com.cn/Conference/8280928Ding Qian, Zhai Hong-Mei. The adavance in resarches of friction dynamics in mechanics system, Advances in Mechanics, 2013, 43(1):112-131 http://d.old.wanfangdata.com.cn/Conference/8280928 [24] 张新刚, 基于扩展Stribeck效应的摩擦实验建模及系统动力学研究[博士学位论文], 上海交通大学, 中国, 2009 http://cdmd.cnki.com.cn/Article/CDMD-10248-2010033193.htmZhang X G. Researches of Experimental Modeling and System Dynamics on Frictions Concerning Extended Stribeck Effect[Ph.D. thesis], Shanghai Jiao Tong University, China, 2009 http://cdmd.cnki.com.cn/Article/CDMD-10248-2010033193.htm [25] 向红标, 开放式伺服系统的摩擦建模与补偿研究[博士学位论文], 天津大学, 中国, 2010 http://cdmd.cnki.com.cn/Article/CDMD-10056-1011266411.htmXiang H B. Research on Model and Compensation for Open Servo System[Ph.D. thesis], Tianjin University, China, 2010 http://cdmd.cnki.com.cn/Article/CDMD-10056-1011266411.htm -

 下载:
下载:



图(5) / 表(1)
计量
- 文章访问数: 2549
- HTML全文浏览量: 443
- PDF下载量: 611
- 被引次数: 0
