

-
摘要: 针对欠驱动TORA (Translational oscillations with a rotational actuator)系统, 设计了一种具有执行器饱和约束的输出反馈控制器.与其他现有方法相比, 本文方法不仅考虑了执行器饱和约束和速度信号不可测情形, 而且考虑了旋转小球可能存在的循环行为.具体而言, 首先根据TORA系统模型分析了TORA系统的控制目标; 随后, 构造了一种新颖的能量函数, 在此基础上设计了一种考虑执行器饱和约束的输出反馈控制器, 并通过严格的数学分析证明了闭环系统关于平衡点的稳定性; 最后, 借助数值仿真测试检验了所提控制器的控制性能, 并与已有方法进行了对比.仿真测试结果表明本文所提方法具有更好的控制性能.Abstract: In this paper, an output feedback controller with the actuator saturation constraint is designed for the underactuated translational oscillations with a rotational actuator (TORA) system. By comparing with the existing control methods, in this paper, not only are the actuator saturation constraint and unmeasured velocity signal taken into consideration, but also the undesired unwinding behaviour is taken into account. In particular, the control objective of the TORA system is firstly analyzed on the basis of the TORA system model. Then, a novel energy function is constructed and an output feedback controller is proposed straightforwardly, which takes the actuator saturation constraint into consideration. The stability of the closed-loop system with respect to the equilibrium point is proven through rigorous mathematical analysis. Finally, the control performance of the proposed controller in comparison with an existing control method is examined by using numerical simulation tests. The results of simulation tests show that the proposed method achieves better control performance.
-
Key words:
- Underactuated TORA systems /
- output feedback /
- saturation constraint /
- unwinding behaviour
-
欠驱动系统是控制量个数少于系统自由度个数的一类非线性系统, 此类系统因其具有造价低、重量轻、能耗小、灵活度强等优点, 而被广泛地应用于各个领域, 如桥式起重机[1-2]、无人机吊挂飞行系统[3]、欠驱动船舶[4]、杂技机器人(Acrobot)[5]、四旋翼飞行器[6]、具有旋转激励的平移振荡器(Translational oscillations with a rotational actuator, TORA)[7-8]等欠驱动系统均受到机械与控制等领域学者的广泛关注.
特别地, 由Rand等[7]学者提出的TORA系统, 最初作为双自旋航天器的简化模型用于研究自振现象.后来由于TORA系统具有强耦合、高度非线性、欠驱动等特性, 而被作为一种非线性基准系统主要用于非线性控制器设计、验证非线性控制算法的控制性能或教学研究.目前国内外已有多所高校和研究机构针对TORA系统的控制问题展开研究.对于TORA系统, 根据反馈类型不同, 常见的控制器设计方法主要可分为两类.一类是基于全状态反馈的控制策略, 如文献[8]考虑重力因素, 根据Euler-Lagrange建模方法建立了TORA系统的动力学模型, 并在此基础上基于能量分析设计了一种状态反馈控制器.文献[9]基于最大反馈线性化将TORA系统模型转化为具有稳定内动态的三阶线性系统, 进而利用极点配置方案为TORA系统设计了一种镇定控制策略.考虑到系统可能存在参数不确定情况, 文献[10]提出了一种可在线估计系统不确定参数的自适应耦合控制器.除此之外, 部分学者考虑到系统可能存在不确定的外界干扰, 将滑模控制技术用于TORA系统的镇定控制, 并取得了一些研究成果[11-13].另一类是基于输出反馈的控制策略, 如文献[14]针对二维欠驱动TORA系统提出了一种仅需旋转小球角度信息的输出反馈控制器.此外, 还有许多学者[15-18]针对TORA系统的输出反馈控制问题展开了研究, 提出了一些性能良好的控制方法.然而, 上述文献均未考虑TORA系统中旋转小球可能存在的循环行为[19], 即对于旋转小球而言, 旋转角度$\theta =0$与$\theta=2n\pi ~(n\in \pm 1, \pm 2, \cdots )$在实际的物理空间中代表相同的物理形态.目前, 已有文献考虑了TORA系统循环现象的控制问题, 如文献[20]针对旋转小球的旋转角度提出了一种具有约束的控制方法, 可保证旋转小球在预设的范围内转动, 但其预设范围极为保守, 且假设系统状态全部可测并可提供无穷大的输入转矩.特别地, 由Rand等[7]学者提出的TORA系统, 最初作为双自旋航天器的简化模型用于研究自振现象.后来由于TORA系统具有强耦合、高度非线性、欠驱动等特性, 而被作为一种非线性基准系统主要用于非线性控制器设计、验证非线性控制算法的控制性能或教学研究.目前国内外已有多所高校和研究机构针对TORA系统的控制问题展开研究.对于TORA系统, 根据反馈类型不同, 常见的控制器设计方法主要可分为两类.一类是基于全状态反馈的控制策略, 如文献[8]考虑重力因素, 根据Euler-Lagrange建模方法建立了TORA系统的动力学模型, 并在此基础上基于能量分析设计了一种状态反馈控制器.文献[9]基于最大反馈线性化将TORA系统模型转化为具有稳定内动态的三阶线性系统, 进而利用极点配置方案为TORA系统设计了一种镇定控制策略.考虑到系统可能存在参数不确定情况, 文献[10]提出了一种可在线估计系统不确定参数的自适应耦合控制器.除此之外, 部分学者考虑到系统可能存在不确定的外界干扰, 将滑模控制技术用于TORA系统的镇定控制, 并取得了一些研究成果[11-13].另一类是基于输出反馈的控制策略, 如文献[14]针对二维欠驱动TORA系统提出了一种仅需旋转小球角度信息的输出反馈控制器.此外, 还有许多学者[15-18]针对TORA系统的输出反馈控制问题展开了研究, 提出了一些性能良好的控制方法.然而, 上述文献均未考虑TORA系统中旋转小球可能存在的循环行为[19], 即对于旋转小球而言, 旋转角度$\theta =0$与$\theta=2n\pi ~(n\in \pm 1, \pm 2, \cdots )$在实际的物理空间中代表相同的物理形态.目前, 已有文献考虑了TORA系统循环现象的控制问题, 如文献[20]针对旋转小球的旋转角度提出了一种具有约束的控制方法, 可保证旋转小球在预设的范围内转动, 但其预设范围极为保守, 且假设系统状态全部可测并可提供无穷大的输入转矩.
鉴于上述分析, 考虑到执行器可能存在饱和约束情况以及旋转小球可能出现的旋转现象, 为了避免使用速度信号, 本文针对TORA系统的镇定控制问题, 提出了一种输出反馈控制器.具体而言, 首先给出了TORA系统的动力学模型并介绍了TORA系统的控制目标; 随后根据系统的无源耗散性构造了一种新颖的能量函数, 在此基础上设计了相应的非线性输出反馈控制器, 并对闭环系统状态的有界性和收敛性进行了分析; 最后, 进行了仿真测试验证, 并与已有控制方法进行了对比, 结果表明本文方法在考虑执行器饱和约束和旋转小球旋转现象的前提下, 只需输出反馈仍具有良好的控制效果.
1. 问题描述
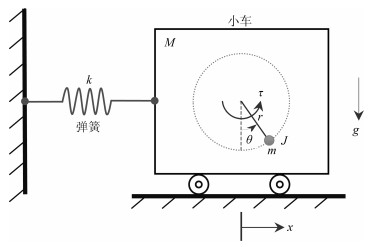
本文考虑旋转小球可在竖直平面内转动的TORA系统(如图 1所示)的镇定控制问题, 借助Euler-Lagrange建模方法可得其如下系统模型[8]:
$$ (M+m)\ddot{x}+mr\ddot{\theta}\cos{\theta}-mr{\dot{\theta}}^2 \sin{\theta}+kx=0 $$ (1) $$ \label{system model 2} mr \ddot x \cos\theta+ (mr^2+J)\ddot \theta+mgr\sin\theta=\tau $$ (2) 其中, $M$和$m$分别为平移振荡小车和旋转小球的质量; $x(t)$表示平移振荡小车偏离平衡点位置的位移; 旋转小球的转动半径为$r$; 旋转小球逆时针旋转方向为正方向, 与竖直向下所形成的夹角为$\theta(t)$; 旋转小球关于其质心的转动惯量为$J$; 平移振荡小车通过一个劲度系数为$k$的弹簧与固定端连接; $\tau(t)$代表系统的输入转矩.
该系统的控制目标为当平移振荡小车或旋转小球偏离平衡位置时, 在输入转矩$\tau(t)$作用下将振荡小车和旋转小球镇定至目标位置, 即
$$ \begin{align} \label{control objective} \lim\limits_{t \to \infty}[\begin{array}{cccc} x& \dot x & \theta & \dot \theta \end{array}]^{\mathrm T} = [\begin{array}{cccc} 0 & 0 & 0 & 0 \end{array}]^{\mathrm T} \end{align} $$ (3) 如前所述, 在实际的物理空间中, $\theta =0$与$\theta=2n\pi~ (n\in \pm 1, \pm 2, \cdots )$1代表相同的物理形态, 因此, 不同于已有方法, 为了避免循环现象的出现, 本文的控制目标是将振荡小车和旋转小球镇定至如下平衡点中的其中一个:
$$ \begin{align*} \lim\limits_{t \to \infty}[\begin{array}{cccc} x& \dot x & \theta & \dot \theta \end{array}]^{\mathrm T} = [\begin{array}{cccc} 0 & 0 & 2n\pi & 0 \end{array}]^{\mathrm T} \end{align*} $$ 1在随后的分析中, 如无特殊说明, n ∈ Z表示一个整数.
2. 主要结果
本节将针对TORA系统的控制问题, 为避免系统出现循环现象, 设计一种考虑执行器饱和约束的输出反馈控制方法, 并给出详细的控制器设计过程和相应的稳定性分析.
2.1 控制器设计
由文献[8]可知, TORA系统的总机械能为
$$ \begin{align} \label{total energy} E=&\frac{1}{2}(M+m){\dot x}^2 + mr \dot x \dot \theta \cos \theta + \frac{1}{2} (mr^2+J){\dot \theta}^2 +\nonumber \\ &\frac{1}{2}kx^2+mgr(1-\cos\theta) \geq 0 \end{align} $$ (4) 对式(4)两边关于时间进行求导, 并利用式(1)和(2)进行化简并整理后可得
$$ \label{total energy dot} \dot E=\dot \theta \tau $$ (5) 表明TORA系统是一个无源耗散系统, 可根据该性质进行控制器设计.为避免系统出现循环现象, 在系统总机械能(4)基础上, 构造如下非负函数:
$$ \label{Engergy Function Sin} V_s = E- mgr(1-\cos\theta)+ 4k_p\sin^2(0.25 \theta) \geq 0 $$ (6) 其中, $k_p \in {\bf R}^+$为正的控制参数.对上式(6)两边关于时间进行求导可得
$$ \begin{align} \label{Engergy Function Sin dot} {\dot V}_s = \, &\dot \theta \tau -mgr\dot \theta \sin\theta+ 2k_p \dot\theta \sin(0.25 \theta)\cos(0.25 \theta) =\nonumber \\ & \dot \theta \cdot [ \tau -mgr \sin\theta + k_p \sin(0.5\theta)] \end{align} $$ (7) 实际应用过程中, 执行器通常存在饱和现象, 故控制输入应满足如下条件:
$$ \label{saturated input} |\tau (t)| \leq \tau_{\max} $$ (8) 其中, $\tau_{\max} \in {\bf R}^+$表示系统可提供的最大输入转矩.
基于式(7)及系统控制输入约束(8), 提出如下考虑执行器饱和约束的输出反馈控制器
$$ \label{controller} \tau = -k_p \sin(0.5\theta) - k_d \tanh (\vartheta)\cos\theta +mgr \sin\theta $$ (9) 变量$\vartheta(t)$由如下方程产生
$$ \label{virtual dot theta} \left \{ \begin{array}{l} \vartheta = \phi+ b \sin\theta \\ \dot \phi = -ak_d\tanh(\phi + b \sin\theta) \end{array}\right. $$ (10) 其中, $\phi(t)$为辅助函数, 用于动态产生伪速度信号$\vartheta(t)$; $a, b, k_d \in {\bf R}^+$为正的控制增益, 且控制增益$k_p, k_d $的选取需满足如下条件2:
$$ \begin{align} \label{bounded condition} k_p + k_d +mgr \leq \tau_{\max} \end{align} $$ (11) 2本文所给控制增益的选取条件较为保守, 在实际应用过程中可适当放宽该条件, 通过随后的仿真测试可发现实际控制输入量远小于系统可提供的最大输入转矩.
注 1. 值得说明的是, 为避免旋转小球发生循环行为且考虑到执行器的饱和约束, 在控制器设计时分别引入了正弦函数$\sin(\ast)$和双曲正切函数$\tanh(\ast)$, 利用方程(10)动态产生伪速度信号$\vartheta(t)$代替真实角速度信号$\dot \theta (t)$, 实现无需速度反馈的饱和约束反馈控制器设计.
注 2. 考虑到执行器的饱和约束, 本文在进行控制器设计时使用了双曲正切函数$\tanh(\ast)$, 此处还可采用其他形式的饱和函数, 如$\arctan(\ast)$, $(\ast)/\sqrt{1+(\ast)^2}$, $\rm{sat}(\ast)$等.
2.2 稳定性分析
此节将通过严格的数学分析证明闭环系统状态渐近收敛于平衡点位置, 且系统输入满足饱和约束条件.
定理 1.对于欠驱动TORA系统(1)和(2), 在所提控制器(9)作用下, 闭环系统关于平衡点是渐近稳定的, 即闭环系统状态会随时间推移收敛于如下平衡点中的其中一个:
$$ \begin{align} \label{Theorem} \lim\limits_{t \to \infty}[\begin{array}{cccc} x& \dot x & \theta & \dot \theta \end{array}]^{\mathrm T} = [\begin{array}{cccc} 0 & 0 & 2n\pi & 0 \end{array}]^{\mathrm T} \end{align} $$ (12) 且系统输入满足如下约束
$$ \label{bounded input} |\tau (t)| \leq \tau_{\max} $$ (13) 证明. 由于控制参数$k_p, k_d$的选取满足条件(11), 因此, 在整个控制过程中, 系统的控制输入始终满足
$$ |\tau (t)| \leq \tau_{\max} $$ (14) 为证明闭环系统关于平衡点的稳定性, 考虑如下能量函数:
$$ \label{non-negative function} V(t) = V_s (t) + \frac{k_d}{b}\ln [\cosh (\vartheta)] \geq 0 $$ (15) 对上式(15)两边关于时间进行求导, 并利用式(7)结论可得
$$ \label{non-negative function dot} {\dot V}(t) = \dot \theta \cdot [ \tau -mgr \sin\theta+ k_p \sin(0.5\theta)] +\frac{k_d}{b}{ \dot \vartheta} \tanh(\vartheta) $$ (16) 由式(10)可知, $\dot \vartheta(t)$的具体表达式为
$$ \label{vartheta dot} \dot \vartheta = -ak_d\tanh(\phi + b \sin\theta) + b \dot \theta \cos \theta $$ (17) 联合所提控制器表达式(9)及式(16)结论可得
$$ \label{non-negative function dot result} {\dot V}(t) = -\frac{ak_d^2}{b} \tanh^2(\vartheta) \leq 0 $$ (18) 进一步可得闭环系统(1)和(2)是李雅普诺夫意义下稳定的, 且有如下结论:
$$ \label{non-negative function bounded} V(t) \in {\mathcal L}_\infty $$ (19) 并且闭环系统状态均有界, 即
$$ \label{state bounded} x, \dot x, \theta, \dot \theta, \vartheta, \phi , \tau \in {\mathcal L}_\infty $$ (20) 为证明闭环系统状态的渐近收敛性, 定义如下不变集:
$$ \label{Largest invariant set} \mathcal S = \left \{ (x, \dot x, \theta, \dot \theta) \mid {\dot V}(t) =0 \right \} $$ (21) 因此, 由式(18)可知, 在不变集$\mathcal S$中
$$ \label{vartheta zero} \vartheta =0 \Longrightarrow \dot \vartheta =0 $$ (22) 结合式(17)可得
$$ \label{theta dot zero} \dot \theta \cos \theta =0 \Longrightarrow\cos\theta =0 ~{\rm{or}}~\dot \theta = 0 $$ (23) 若$\cos\theta =0$, 此时
$$ \label{cos theta zero} \theta = \frac{(2n+1)\pi}{2} \Longrightarrow \ddot \theta =0 $$ (24) 联合方程(2)及控制器表达式(9)可得如下结论:
$$ \label{cos theta zero tau} k_p \sin(0.5\theta) = 0 \Longrightarrow \theta = 2n\pi $$ (25) 与假设$\cos\theta =0$矛盾, 故假设不成立.因此有$\dot \theta =0$, 故进一步可得
$$ \label{theta ddot zero} \theta = c, ~ \ddot \theta =0 $$ (26) 其中, $c \in \bf R$为一常数.为分析不变集$\mathcal S$中$\dot x(t)$和$x(t)$的值, 分如下两种情况进行分析:
情形 1. 在不变集$\mathcal S$中$\dot x(t)\equiv0$, 则$\ddot x(t)=0$, $x(t)$为一常数, 则由式(1)、式(23)及式(26)可得
$$ \label{x zero} x(t)=0 $$ (27) 将控制器表达式(9)代入式(2)并利用式(22)和式(26)结论可得
$$ \label{mgrsin=sin} -k_p \sin (0.5\theta) = 0 \Longrightarrow \theta = 2n\pi $$ (28) 情形 2. 在不变集$\mathcal S$中$\dot x(t)$不恒等于零, 即在$\mathcal S$中至少有一点使得$\dot x(*)\neq0$.又因$\ddot x(t) \in {\mathcal L}_\infty$, 因而$\dot x(t)$连续, 所以存在一个$\dot x(*)$的邻域$D_{\dot x}$, 使得在邻域$D_{\dot x}$中
$$ \dot x(t)\neq0 $$ (29) 在邻域$D_{\dot x}$中进行如下分析, 将所提控制器表达式(9)代入式(2)并结合式(1)及式(23)和式(26)结论进行整理化简可得
$$ \label{theta x} kxmr\cos \theta = k_p (M+m)\sin(0.5\theta) $$ (30) 由式(26)可知, $\theta(t)$在不变集$\mathcal S$中为一常数, 故结合式(30)可知$x(t)$在不变集$\mathcal S$中亦为常数, 所以$\dot x(t)=0$, 与假设在邻域$S_{\dot x}$中存在某点$\dot x(*)\neq0$矛盾, 故假设不成立.
综合上述分析可知:不变集$\mathcal S$中仅包含平衡点$ [~x(t)~~\dot x(t)~~\theta(t)~~\dot \theta(t)~]^{\rm T} = [~0~~0 ~~2n\pi ~~0~]^{\rm T}$中的其中一个.于是, 根据LaSalle不变性原理[21]可知, 闭环系统状态在所提控制器的作用下随时间推移渐近收敛到平衡点处.
3. 仿真实验结果与分析
本节将通过两组仿真测试来检验本文所提控制方法的有效性, 两组仿真测试分别验证所提控制器的镇定控制性能和避免循环行为的输入有界控制性能.为了证明本文所提控制方法优越的控制性能, 将与已有文献[8]中所提方法的控制性能进行对比.在随后的仿真测试中, 系统参数选取与文献[8]中所选取的系统参数一致, 具体如下:
$$ \begin{align*} &M=1.3608\, {\mathrm {kg}}, ~m=0.096\, {\mathrm {kg}}, ~k=186.3\, {\mathrm {N/m}} \\ &r=0.0592\, {\mathrm {m}}, ~J=0.0002175\, {\mathrm {kg}}\cdot{\mathrm {m}}^2 \end{align*} $$ 文献[8]中所提控制器的控制增益选取为文献中所给
$$ k_1=450, ~k_2=5.3, ~k_3=1 $$ (31) 本文所提控制器的控制增益经反复测试后选取为
$$ \label{control gain} k_p=0.12, ~k_d=0.066, ~a=450, ~b=2 $$ (32) 假设系统可提供的最大输入转矩为
$$ \tau_{\max} = 0.25 \, {\mathrm {N\cdot m}} $$ (33) 显然, 所选控制增益(32)满足饱和约束条件(11).
3.1 镇定控制测试
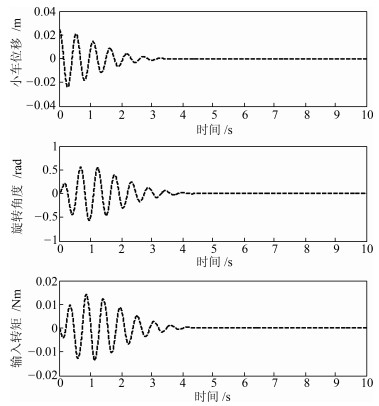
本节将检验本文所提控制方法的镇定控制效果, 系统的初始状态选取为
$$ [\begin{array}{cccc} x(0) & \dot x(0) & \theta(0)& \dot \theta(0) \end{array}]^{\mathrm T} = [\begin{array}{cccc} 0.025\, {\mathrm m} & 0 & 0 & 0 \end{array}]^{\mathrm T} $$ 图 2给出了在所提输出反馈控制器作用下闭环控制系统状态及输入转矩随时间变化的曲线.通过观察图 2可看出, 在所提控制器作用下, 平移振荡小车和旋转小球较快地到达平衡点位置, 且输入转矩始终在系统可提供的范围内.仿真结果表明本文所提方法具有较好的镇定控制性能.
3.2 避免循环现象的有界输入测试
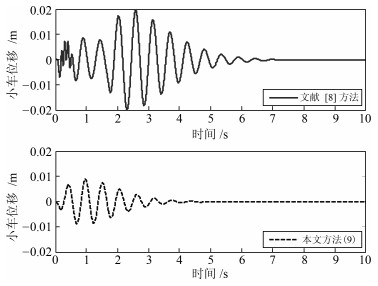
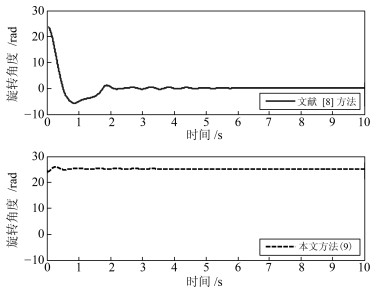
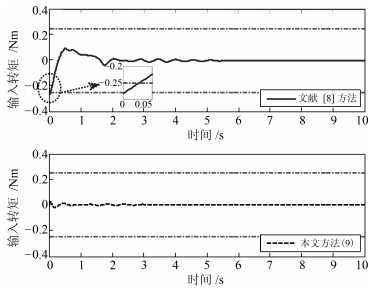
相比已有方法, 本文所提方法不仅实现了输出反馈控制, 而且考虑系统的饱和约束和循环现象.为了检验本文所提控制器的上述性能, 本节将与现有文献[8]中方法的控制效果进行对比, 选取如下系统初始状态:
$$ [\begin{array}{cccc} x(0) & \dot x(0) & \theta(0)& \dot \theta(0) \end{array}]^{\mathrm T} = [\begin{array}{cccc} 0 & 0 & 24\, {\mathrm {rad}} & 0 \end{array}]^{\mathrm T} $$ 图 3~5分别绘制了两种控制器作用下, 平移振荡小车、旋转小球及系统输入转矩随时间变化的曲线.从三幅图中可看出, 两种控制器均可将偏离平衡点位置的旋转小球镇定至平衡点位置.从图 4可知, 在两种控制器作用下, 旋转小球最终到达了``不同的''平衡点位置, 分别为$\theta=0$和$\theta=8\pi$.然而, 在实际的物理空间中, 它们($\theta=0$和$\theta=8\pi$)代表相同的物理形态.相比之下, 本文方法避免了旋转小球的循环行为, 将旋转小球镇定至较近的平衡点以节约能耗.对比图 3两种控制器的仿真测试结果可看出, 本文所提方法表现出更为优越的暂态控制性能, 平移振荡小车的振荡幅值更小, 到达平衡点位置的时间更短.从图 5结果可知, 本文所提控制器的输入转矩在整个控制过程中均远小于系统可提供的最大输入转矩, 满足系统的饱和约束条件; 文献[8]所提控制器的输入转矩则超出了系统可提供的最大输入转矩, 在实际应用过程中, 此类情形可能导致控制器失灵, 严重时可能导致闭环系统不稳定.仿真测试结果说明:本文所设计的控制器不仅可避免旋转小球的循环现象, 而且能在执行器存在饱和约束且没有速度信号反馈的情况下, 取得良好的镇定控制效果.
4. 结论
考虑到TORA系统可能存在执行器饱和约束和速度信号不可测的情形, 本文提出了一种有界输入的输出反馈控制器.与现有的TORA系统镇定控制方法相比, 本文方法可避免TORA系统的循环现象, 从而减小系统的能耗; 无需速度信号反馈, 可降低设备成本, 简化系统结构; 考虑了系统可能存在的执行器饱和约束, 避免控制量超出系统可提供的最大输入转矩而陷入饱和.理论分析和仿真测试结果皆表明本文所提控制方法具有上述控制效果, 具有良好的控制性能.
-
[1] Sun N, Yang T, Fang Y, Wu Y, Chen H. Transportation control of double-pendulum cranes with a nonlinear quasiPID scheme: design and experiments. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(7): 1408-1418 doi: 10.1109/TSMC.2018.2871627 [2] Wu X, He X. Nonlinear energy-based regulation control of three dimensional overhead cranes. IEEE Transactions on Automation Science and Engineering, 2017, 39(12): 1763-1770 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=45278bc98e214fd78edb9ed414e52d2d [3] 王诗章, 鲜斌, 杨森.无人机吊挂飞行系统的减摆控制设计.自动化学报, 2018, 44(10): 1771-1780 doi: 10.16383/j.aas.2018.c170413Wang Shi-Zhang, Xian Bin, Yang Sen. Anti-swing controller design for an unmanned aerial vehicle with a slung-load. Acta Automatica Sinica, 2018, 44(10): 1771-1780 doi: 10.16383/j.aas.2018.c170413 [4] 林安辉, 蒋德松, 曾建平.具有输入饱和的欠驱动船舶编队控制.自动化学报, 2018, 44(8): 1496-1504 doi: 10.16383/j.aas.2018.c160766Lin An-Hui, Jiang De-Song, Zeng Jian-Ping. Underactuated ship formation control with input saturation. Acta Automatica Sinica, 2018, 44(8): 1496-1504 doi: 10.16383/j.aas.2018.c160766 [5] Zhang A, She J, Lai X, Wu M. Motion planning and tracking control for an acrobot based on a rewinding approach. Automatica, 2013, 49(1): 278-284 doi: 10.1016/j.automatica.2012.10.007 [6] 王宁, 王永.基于模糊不确定观测器的四旋翼飞行器自适应动态面轨迹跟踪控制.自动化学报, 2018, 44(4): 685-695 doi: 10.16383/j.aas.2017.c160481Wang Ning, Wang Yong. Fuzzy uncertainty observer based adaptive dynamic surface control for trajectory tracking of a quadrotor. Acta Automatica Sinica, 2018, 44(4): 685-695 doi: 10.16383/j.aas.2017.c160481 [7] Rand R H, Kinsey R J, Mingori D L. Dynamics of spinup through resonance. International Journal of Non-Linear Mechanics, 1992, 27(3): 489-502 doi: 10.1016/0020-7462(92)90015-Y [8] 高丙团. TORA的动力学建模及基于能量的控制设计.自动化学报, 2008, 34(9): 1221-1224 doi: 10.3724/SP.J.1004.2008.01221Gao Bing-Tuan. Dynamical modeling and energy-based control design for TORA. Acta Automatica Sinica, 2008, 34(9): 1221-1224 doi: 10.3724/SP.J.1004.2008.01221 [9] 张宇, 郭源博, 李芦钰, 张晓华.基于最大反馈线性化的TORA系统非奇异镇定控制.控制与决策, 2018, 33(8): 1415-1421 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201808009Zhang Yu, Guo Yuan-Bo, Li Lu-Yu, Zhang Xiao-Hua. Nonsingular controller for TORA system based on maximal feedback linearization. Control and Decision, 2018, 33(8): 1415-1421 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201808009 [10] 武宪青, 何熊熊.欠驱动RTAC系统的自适应耦合控制器设计.自动化学报, 2015, 41(5): 1047-1052 doi: 10.16383/j.aas.2015.c140618Wu Xian-Qing, He Xiong-Xiong. Adaptive coupling controller design for underactuated RTAC systems. Acta Automatica Sinica, 2015, 41(5): 1047-1052 doi: 10.16383/j.aas.2015.c140618 [11] Xu R, ñzg˜üner Ü. Sliding mode control of a class of underactuated systems. Automatica, 2008, 44(1): 233-241 doi: 10.1016/j.automatica.2007.05.014 [12] Mobayen S. A novel global sliding mode control based on exponential reaching law for a class of underactuated systems with external disturbances. Journal of Computational and Nonlinear Dynamics, 2016, 11(2): 021011-1-9 doi: 10.1115/1.4031087 [13] Sun N, Wu Y, Fang Y, Chen H, Lu B. Nonlinear continuous global stabilization control for underactuated RTAC systems: design, analysis, and experimentation. IEEE/ASME Transactions on Mechatronics, 2017, 22(2): 1104-1115 doi: 10.1109/TMECH.2016.2631550 [14] Gao B, Bao Y, Xie J, Jia L. Passivity-based control of twodimensional translational oscillator with rotational actuator. Transactions of the Institute of Measurement and Control, 2014, 36(1): 111-118 doi: 10.1177/0142331213495438 [15] Sun N, Wu Y, Fang Y, Chen H. Nonlinear stabilization control of multiple-RTAC systems subject to amplituderestricted actuating torques using only angular position feedback. IEEE Transactions on Industrial Electronics, 2017, 64(4): 3084-3094 doi: 10.1109/TIE.2016.2643598 [16] Boker A M, Khalil H K. Nonlinear observers comprising high-gain observers and extended Kalman fllters. Automatica, 2013, 49(12): 3583-3590 doi: 10.1016/j.automatica.2013.08.031 [17] Xu L, Hu Q. Output-feedback stabilisation control for a class of under-actuated mechanical systems. IET Control Theory & Applications, 2013, 7(7): 985-996 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=4e5c5c26c84a606968f0e92df035cdf7 [18] 许清媛, 杨智, 范正平, 李晓东.一种非线性观测器和能量结合的反馈控制系统.控制理论与应用, 2011, 28(1): 31-36 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201101004Xu Qing-Yuan, Yang Zhi, Fan Zheng-Ping, Li Xiao-Dong. A combination feedback system of nonlinear observer and energy-based control. Control Theory and Applications, 2011, 28(1): 31-36 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201101004 [19] Bupp R T, Bernstein D S, Coppola V T. A benchmark problem for nonlinear control design: problem statement, experimental testbed, and passive nonlinear compensation. In: Proceedings of the 1995 American Control Conference (ACC). Seattle, WA, 1995. 4363-4367 [20] Wu X, Gu M. Adaptive control of the TORA system with partial state constraint. Transactions of the Institute of Measurement and Control, 2019, 41(4): 1172-1177 doi: 10.1177/0142331218794813 [21] Khalil H K. Nonlinear systems (3rd ed). Upper Saddle River, NJ: Prentice Hall, 2002. 期刊类型引用(8)
1. 熊屹林,曾喆昭. 欠驱动TORA系统的自耦PID控制策略. 控制与决策. 2024(03): 853-860 .  百度学术
百度学术2. 李刚,马昕,李轾,李贻斌. 带有双球面摆和变绳长效应的桥式起重机轨迹规划. 自动化学报. 2024(05): 911-923 . 本站查看3. 戴雪刚,陈志环. 干扰作用下的电力巡检机器人运动平衡控制. 武汉科技大学学报. 2024(05): 368-375 . 百度学术4. 杨昕然,陈鹤. 具有参数不确定性的2D TORA系统振动抑制控制. 河北工业大学学报. 2024(05): 68-75 . 百度学术5. 潘昌忠,崔臣臣,周兰,熊培银,陈君. 基于生物启发模型的欠驱动水平TORA系统的有界输入镇定控制. 控制与决策. 2022(05): 1153-1159 . 百度学术6. 张宇,程开新,竺俊杰,武国勋,姚熊亮. 级联RTAC系统动态神经网络辨识与分散镇定控制. 控制理论与应用. 2022(08): 1451-1459 . 百度学术7. 王岳,孙宁,吴易鸣,梁潇,陈鹤,方勇纯. 深海起重机系统的实时轨迹规划方法. 自动化学报. 2021(12): 2761-2770 . 本站查看8. 檀盼龙,秦华阳,孙明玮,刘俊杰,孙青林,陈增强. 欠驱动RTAC的滑模自抗扰镇定控制. 控制理论与应用. 2021(12): 2085-2093 . 百度学术其他类型引用(5)
-

 下载:
下载:
 下载:
下载:
计量
- 文章访问数: 2230
- HTML全文浏览量: 487
- PDF下载量: 225
- 被引次数: 13
