

Reassembly of Fractured Fragments Based on Spanning Tree Cost and Geometric Constraints
-
摘要: 在文物碎片自动重组过程中, 针对传统基于几何驱动重组的方法容易受噪声影响会产生误匹配等问题, 本文提出一种基于生成树代价和和几何约束的文物碎片自动重组方法. 首先, 采用曲度函数提取碎片断裂面上凹凸性显著的n个特征点; 进而, 对其进行拓扑重构, 以特征点空间位置之间的欧氏距离为权值, 构造n阶带权无向完全图及其最小、最大生成树, 以生成树的代价和为邻接约束, 快速筛选潜在匹配碎片; 然后, 再以特征点的主曲率构造特征串, 引入Hausdorff距离来衡量两个特征串之间的相似程度, 可以有效找出配对碎片; 最后, 采用四元数法估算旋转平移矩阵将碎片粗对齐, 再采用迭代最近点算法实现精确对齐. 实验结果表明, 重组误差小于1 mm, 与传统方法相比, 该方法特征点数量较少, 计算量小, 有效提高了碎片重组的效率和准确性.
-
关键词:
- 碎片重组 /
- 带权无向完全图 /
- 最小(大)代价和 /
- Hausdorff距离
Abstract: In the process of automatic reassembly of fractured fragments, the traditional methods based on geometric feature matching are sensitive to noises, which leads to mismatching points/fragments. An automatic reassembly method based on spanning tree cost and geometric constraints is proposed. Firstly, n features with significant concavity or convexity on the fracture surfaces of the fragments are extracted using the curvature function. Then, the topologies of the features are reconstructed, therefore, the n-th order weighted undirected complete graph and its minimum and maximum spanning trees can be constructed by setting the Euclidean distance between the feature points as the weights; thus the cost of spanning trees are utilized as the adjacency constraint in order to quickly screens the potential matching fragments. Furthermore, the feature strings are formed by aggregating the main curvatures of the feature points, and the Hausdorff distance is used to measure the similarities between the two feature strings. Consequently, the matching pieces of fragments can be effectively detected. Finally, the quaternion method is performed to complete the coarse alignment of adjacent fragments, and then the iterative closest point algorithm (ICP) is used to achieve precise alignment. The experimental results demonstrate that the reassembly error is less than 1mm, and compared to the traditional method, the number of feature points used in the proposed method is relatively small, and the computational complexity is reduced, which effectively improves the efficiency and accuracy of fragments reassembly. -
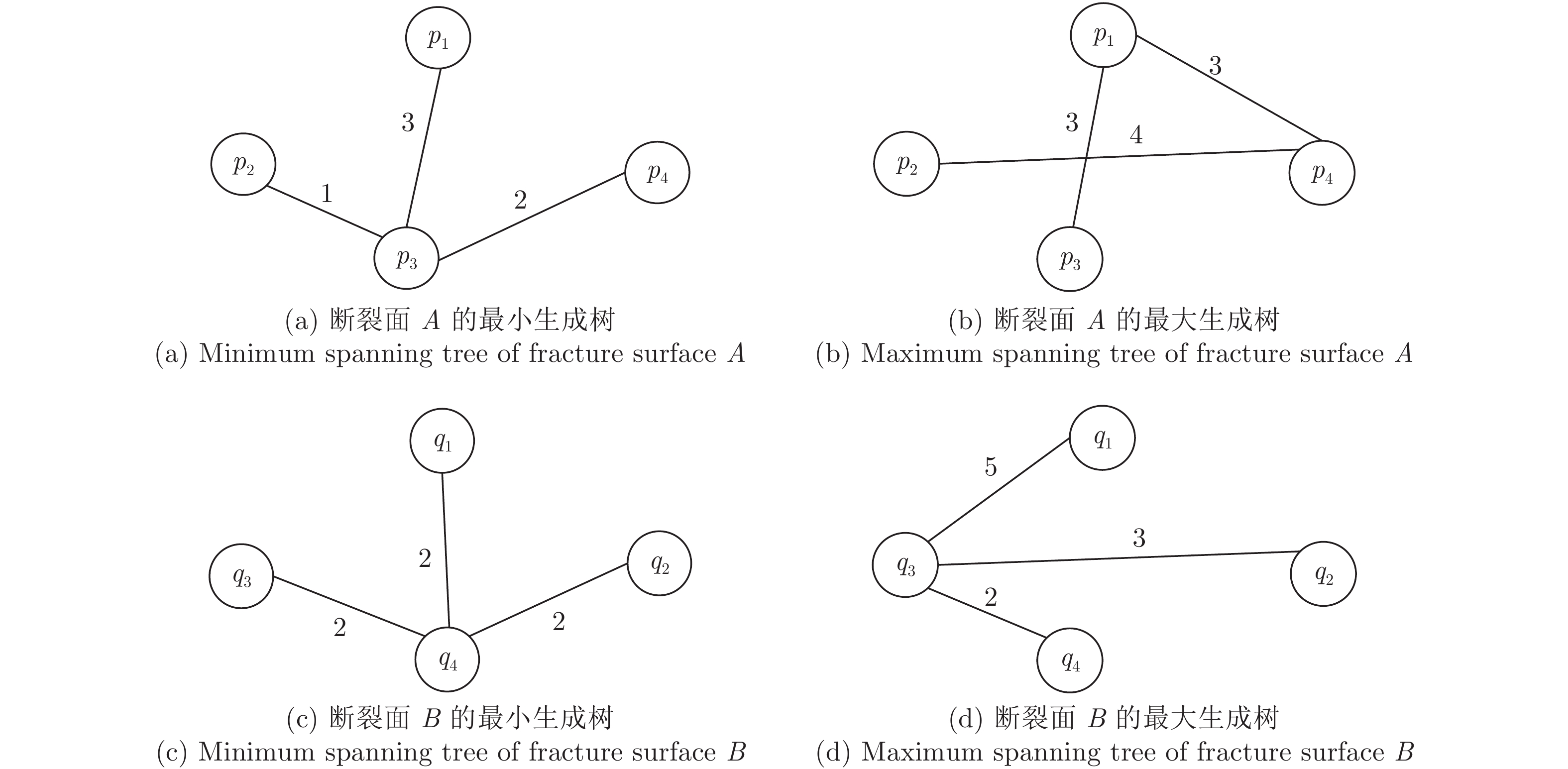
图 4 断裂面A、B的最小、最大生成树
Fig. 4 Minimum and maximum spanning trees for fracture surfaces A and B
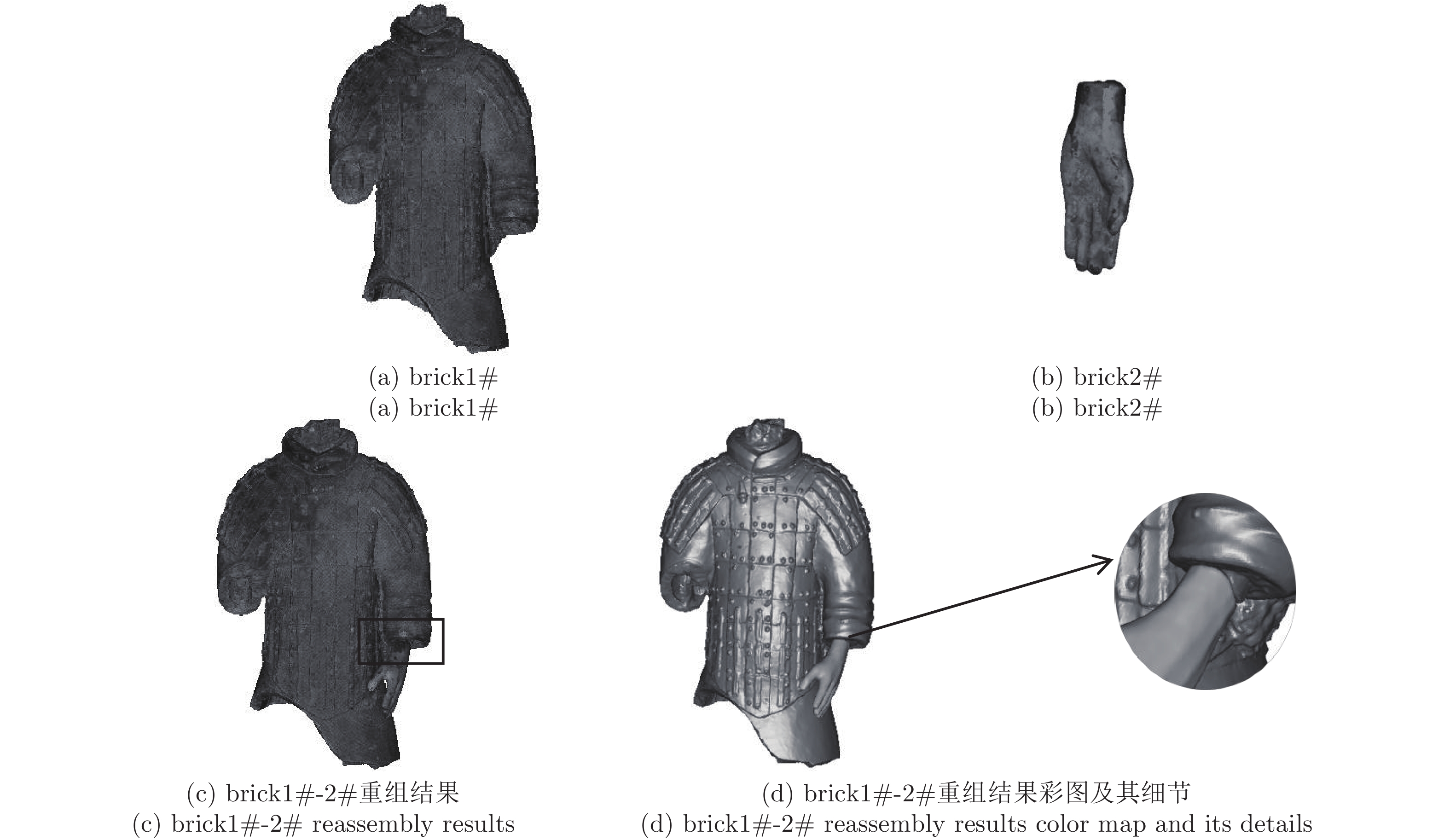
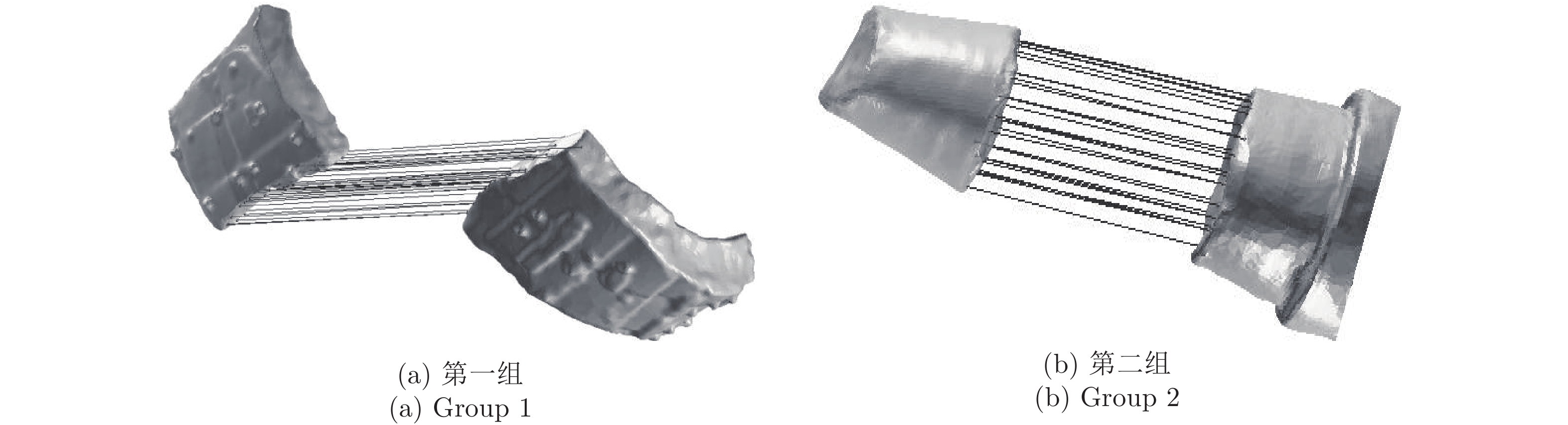
图 6 G10-57号俑左手臂部分邻接碎片重组结果
Fig. 6 Reassembly results of some left arm adjacent fragments of Warriors of G10-57
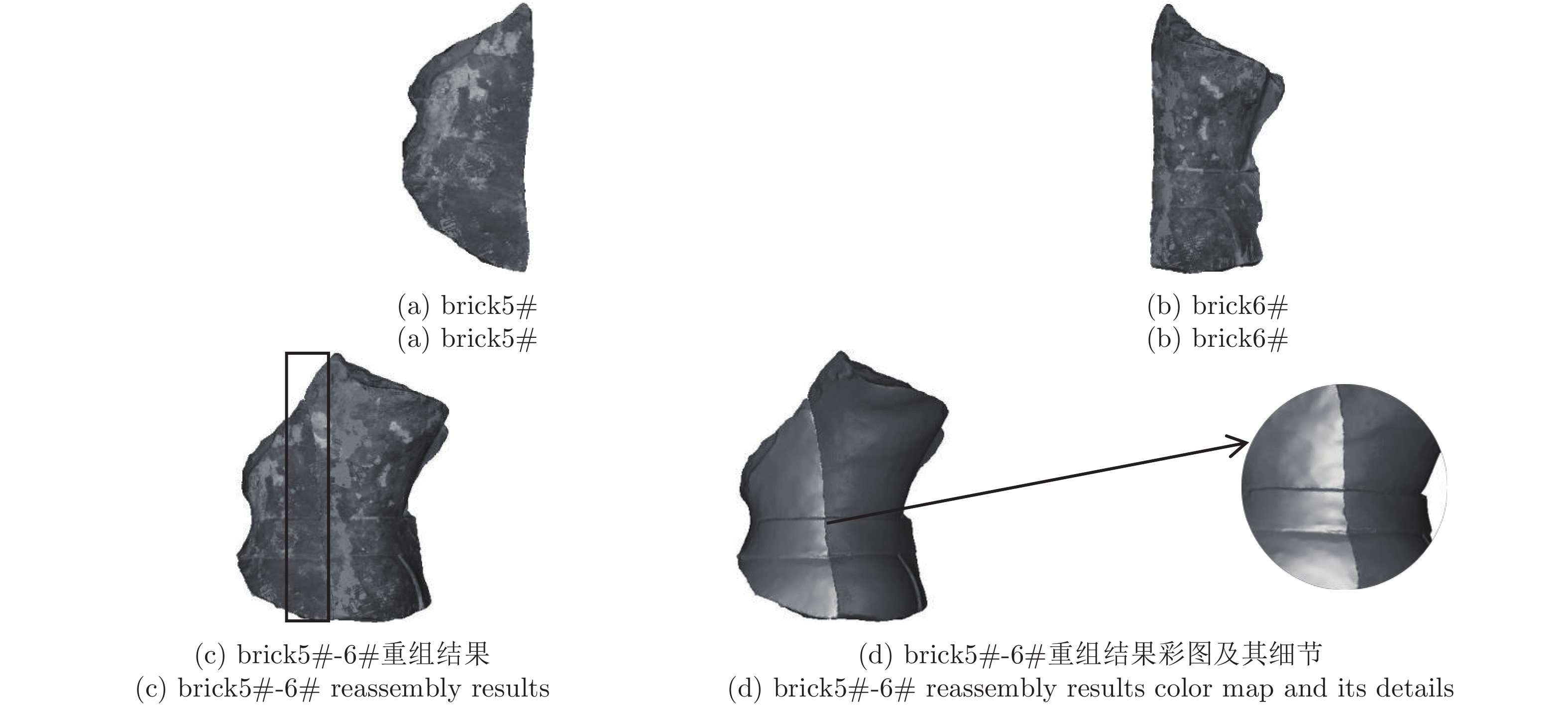
图 9 G3-2号俑部分邻接碎片重组结果
Fig. 9 Reassembly results of some adjacent fragments of Warriors of G3-2
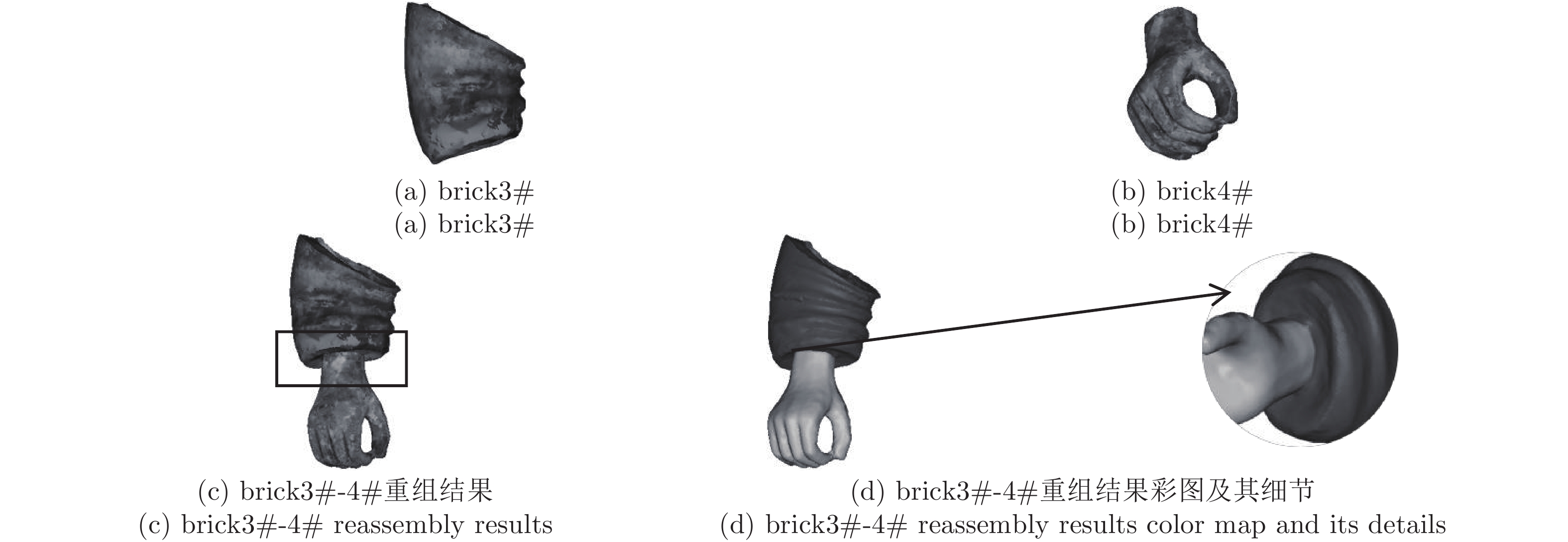
图 7 G10-57号俑右手臂部分邻接碎片重组结果
Fig. 7 Reassembly results of some right arm adjacent fragments of Warriors of G10-57

图 8 G10-57号俑部分邻接碎片重组结果
Fig. 8 Reassembly results of some adjacent fragments of Warriors of G10-57
表 1 原始碎片数据表
Table 1 Raw fragment data table
Experimental
dataNumber of fragment Fragment number Triangular grid number Number of fracture faces G10-57 4 brick1# 403122 7 brick2# 31270 1 brick3# 31030 2 brick4# 45840 1 G3-2 2 brick5# 86266 3 brick6# 94538 4 G10-6 3 brick7# 62230 4 brick8# 47595 4 brick9# 35932 4  下载: 导出CSV
下载: 导出CSV
表 2 不同算法性能对比
Table 2 Performance comparison of different algorithms
Experimental data Running time (s) Recombination error (mm) Initial match rate Reference [17] method Our method Reference [17] method Our method Our method brick1#-2# 23.596 14.748 1.2235 0.8842 0.04 brick3#-4# 19.236 13.472 1.4596 0.9151 0.06 brick1#-2#-3#-4# 28.197 20.643 1.2788 0.8962 0.02 brick5#-6# 41.259 37.941 1.2824 0.8027 0.08 brick7#-8# 25.845 19.739 1.3205 0.8425 0.04 brick7#-8#-9# 46.347 40.675 1.4752 0.9304 0.02
下载: 导出CSV
-
[1] Zheng S Y, Huang R Y, Li J, Wang Z. Reassembling 3D thin fragments of unknown geometry in cultural heritage. Photogrammetrie Fernerkundung Geoinformation, 2015, 2015(3): 215−230 doi: 10.1127/pfg/2015/0267 [2] Winkelbach S, Wahl F M. Pairwise matching of 3D fragments using cluster trees. International Journal of Computer Vision, 2008, 78(1): 1−13 doi: 10.1007/s11263-007-0121-5 [3] Altantsetseg E, Matsuyama K, Konno K. Pairwise matching of 3D fragments using fast fourier transform. The Visual Computer, 2014, 30(6−8): 929−938 doi: 10.1007/s00371-014-0959-9 [4] Huang Q X, Simon Flöry, Gelfand N, Hofer M, Pottmann H. Reassembling fractured objects by geometric matching. ACM Transactions on Graphics, 2006, 25(3): 569−578 doi: 10.1145/1141911.1141925 [5] Papaioannou G, Karabassi E A, Theoharis T. Virtual archaeologist: assembling the past. IEEE Computer Graphics and Applications, 2001, 21(2): 53−59 doi: 10.1109/38.909015 [6] Chen H C H, Bhanu B B B. 3D free-form object recognition in range images using local surface patches. Pattern Recognition Letters, 2007, 28(10): 1252−1262 doi: 10.1016/j.patrec.2007.02.009 [7] 王坚, 周来水. 基于最大权团的曲面粗匹配算法. 计算机辅助设计与图形学学报, 2008, 20(2): 167−173Wang Jian, Zhou Lai-Shui. Surface rough matching algorithm based on maximum weight clique. Journal of Computer-Aided Design & Computer Graphics, 2008, 20(2): 167−173 [8] 李姬俊男, 耿国华, 周明全, 康馨月. 文物碎块虚拟拼接中的表面特征优化. 计算机辅助设计与图形学学报, 2014, 26(12): 2149−2154Li Ji-Jun-Nan, Geng Guo-Hua, Zhou Ming-Quan, Kang Xin-Yue. Surface feature optimization for virtual matching of relic fragments. Journal of Computer-Aided Design & Computer Graphics, 2014, 26(12): 2149−2154 [9] 李群辉. 基于断裂面匹配的破碎刚体复原研究[博士学位论文]. 西北大学, 中国, 2013Li Qun-Hui. Research on Fractured Slid Recovery Based on Bracture Surfaces Matching [Ph. D. dissertation], Northwest University, China, 2013 [10] 袁洁, 周明全, 耿国华, 张雨禾. 基于Morse-Smale拓扑特征的文物碎片拼接算法. 自动化学报, 2018, 44(8): 1486−1495Yuan Jie, Zhou Ming-Quan, Geng Guo-Hua, Zhang Yu-He. Automatic reassembly of fractured fragments based on Morse topological features. Acta Automatica Sinica, 2018, 44(8): 1486−1495 [11] 严蔚敏. 数据结构, 第二版. 北京: 清华大学出版社, 1992.Yan Wei-Min. Data Structure, Second Edition. Beijing: Tsinghua University Press, 1992. [12] Cormen T H, Leiserson C E, Rivest R L, Stein C. Introduction to Algorithms, Third Edition. US: The MIT Press, 2009 [13] Jesorsky O, Kirchberg K J, Firschholz R W. Robust face detection using the Hausdorff distance. International Conference on Audio-& Video-based Biometric Person Authentication. Springer-Verlag, 2001. 90−95 [14] Horn B K P, Hilden H M, Negahdaripour S. Closed-form solution of absolute orientation using orthonormal matrices. Journal of the Optical Society of America A, 1988, 5(7): 1127−1135 doi: 10.1364/JOSAA.5.001127 [15] 江刚武. 空间目标相对位置和姿态的抗差四元数估计[博士学位论文]. 解放军信息工程大学, 中国, 2009Jiang Gang-Wu. A robust estimation using quaternions for relative pose of space object [Ph. D. dissertation]. The PLA Information Engineering University, China, 2009 [16] Besl P J, Mckay H D. A method for registration of 3-D shapes. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(2): 239−256 doi: 10.1109/34.121791 [17] 李群辉, 张俊祖, 耿国华, 周明全. 以轮廓曲线为特征的断裂面匹配. 西安交通大学学报, 2016, 50(9): 105−110 doi: 10.7652/xjtuxb201609017Li Qun-Hui, Zhang Jun-Zu, Geng Guo-Hua, Zhou Ming-Quan. Fracture surfaces matching based on contour curve. Journal of Xi'an Jiao Tong University, 2016, 50(9): 105−110 doi: 10.7652/xjtuxb201609017 [18] Wang Z, Bovik A C. Mean squared error: Love it or leave it? A new look at signal fidelity measures. IEEE Signal Processing Magazine, 2009, 26(1): 98−117 doi: 10.1109/MSP.2008.930649 -


 下载:
下载:


计量
- 文章访问数: 1938
- HTML全文浏览量: 261
- PDF下载量: 139
- 被引次数: 0
