

-
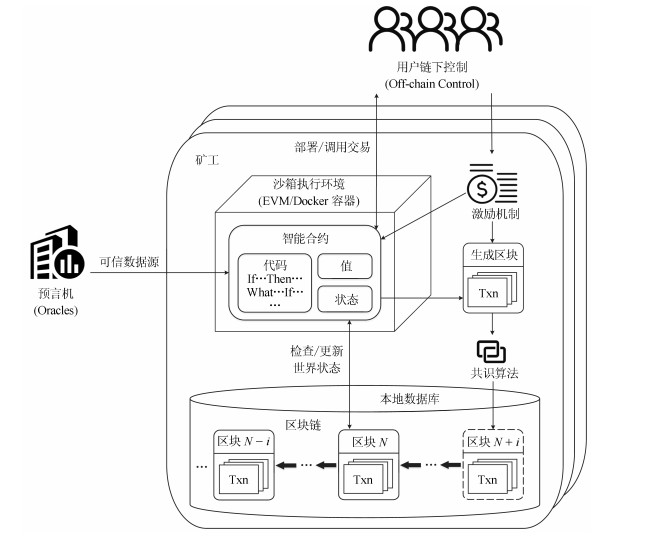
摘要: 智能合约是一种无需中介、自我验证、自动执行合约条款的计算机交易协议,近年来随着区块链技术的日益普及而备受关注.区块链上的智能合约具有去中心化、去信任、可编程、不可篡改等特性,可灵活嵌入各种数据和资产,帮助实现安全高效的信息交换、价值转移和资产管理,最终有望深入变革传统商业模式和社会生产关系,为构建可编程资产、系统和社会奠定基础.本文致力于以区块链智能合约为研究对象,对已有的研究成果进行全面梳理和系统概述,提出了智能合约的基础架构模型并以此为研究框架阐述了智能合约的运行机制与基础架构,总结了智能合约的研究挑战与进展,介绍了智能合约的技术优势与典型应用领域,讨论了智能合约的发展趋势,以期为智能合约的后续研究提供参考.Abstract: Smart contracts are computerized transaction protocols that can self-verify and self-execute the terms of contracts without a trusted third-party intermediary. In recent years, smart contracts have attracted intensive attention with the increasing popularity of their main computational architecture, i.e., blockchain. Blockchain-enabled smart contracts are decentralized, trustless, programmable, and tamper-resistant, they can be flexibly embedded into a variety of data and assets to help achieve secure and efficient information exchange, value transfer and asset management. Thus, they are expected to deepen the revolution of traditional business models and social production relationships, and lay the foundation for building programmable assets, systems and societies. This article is dedicated to a comprehensive analysis and systematic overview of blockchain-enabled smart contracts. Specifically, we proposed a basic model of smart contracts which employs a six-layer architecture and used it as a research framework to explain the operating mechanism and infrastructure of smart contracts. We also summarized their research challenges and recent progresses, introduced their technical advantages and typical application fields, and discussed their future development trends. This article is aimed at providing helpful guidance and reference for future research efforts of blockchain-enabled smart contracts.
-
Key words:
- Blockchain /
- smart contracts /
- operating mechanism /
- basic framework /
- parallel blockchain
-
二维系统与现代过程控制密切相关, 在污水处理、多维数字滤波器、卫星气象云图分析、图像处理等领域有广泛的应用[1-2].由于二维系统具有丰富的工程物理背景, 至今仍是控制领域的研究热点之一.近年来二维系统的分析和控制器设计方面取得了诸多成果, 如文献[3]给出了二维离散线性模型的稳定性判据, 文献[4]给出了二维离散系统的状态反馈控制器设计方法.在此基础上, 二维系统的滤波器设计、$ {H_\infty} $控制等问题也得到了深入研究[5-6].
另一方面, 现代工业过程对于系统安全性和可靠性的要求日益提高, 因此故障检测与故障诊断问题越来越受到重视[7-10].与一维系统相比, 二维系统由于结构复杂, 其故障检测滤波器/观测器的设计难度更大, 需要提出新技术解决设计过程中遇到的非凸问题.此外, 二维系统的残差评价函数以及阈值的设计亦不同于一维系统, 需根据二维系统的特点构造合适的残差评价函数及阈值.因此, 研究二维系统的故障检测问题是非常必要的, 也是存在挑战的.然而, 现有文献的研究成果相对较少, 其中文献[11-13]研究了二维系统的故障检测问题, 采用了全频设计方法, 即没有考虑故障发生的有限频信息; 文献[14]研究了二维Roesser系统在传感器失效情况下的故障检测问题; 文献[15]研究了二维FM系统的故障检测问题.
文献[16]指出, 系统设计时控制单元和故障检测单元是相互关联和作用的, 如果将控制单元和故障检测单元分开设计, 容易忽视两个单元间的关联性:设计控制单元时容易影响故障检测效果, 而设计故障检测单元时可能会影响控制效果.解决该问题的方法之一是采用集成设计策略, 一方面可减少设计步骤, 一定程度上降低设计的复杂度[17]; 另一方面, 集成设计可以考虑控制单元和故障检测单元的关联性和相互作用, 即兼顾和平衡控制性能和故障检测性能.此外, 集成设计也有助于在控制器中结合容错特性[18].目前, 集成设计的研究成果主要集中在一维系统[19], 二维系统的相关研究成果较少[20]. FM模型作为一类重要的二维系统模型, 其同时故障检测与控制方法具有一定的理论意义和实际应用价值, 但该研究未见相关报道, 这是本文的研究动机之一.
本文研究二维FM系统的同时故障检测与控制问题, 采用有限频性能指标刻画故障和干扰信号的有限频特性, 提出构造切平面方法和两步算法来解决设计过程中出现的非凸问题.本文所设计的故障检测滤波器/控制器可以同时实现控制功能和故障检测功能.此外, 以往研究成果常采用递增的残差评价函数, 故障被排除后容易产生故障误报.本文针对二维系统的故障检测问题, 采用新的残差评价函数, 可降低故障误报率.
1. 系统模型
考虑如下二维离散FM模型[21]:
$$ \begin{align} {\pmb x}({ i} + 1, { j} + 1) = \, & A_1{\pmb x}({ i}, { j} + 1) + A_2{\pmb x}({ i} + 1, { j}) +\\ & B_{{ d}1}{\pmb d}({ i}, { j} + 1) + B_{{ d}2}{\pmb d}({ i} + 1, { j}) +\\ & B_{{ u}1}{\pmb u}({ i}, j + 1) + B_{u2}{\pmb u}({ i}+1, j) +\\ & B_{{ f}1}{\pmb f}({ i}, j + 1) + B_{{ f}2}{\pmb f}({ i} + 1, { j}) \\ \pmb y({ i}, { j}) = \, &C{\pmb x}({ i}, { j}) + D_{ d}{\pmb d}({ i}, { j}) + D_{ f}{\pmb f}({ i}, { j}) \\ \pmb z({ i}, { j}) = \, &E{\pmb x}({ i}, { j}) +F_{ u} {\pmb u}({ i}, { j}) \end{align} $$ (1) 其中, $ \pmb x(i, j) \in {\bf R}^n $为状态向量, $ \pmb d(i, j) \in {\bf R}^{{n_d}} $为外部扰动, $ \pmb f(i, j) \in {\bf R}^{{n_f}} $为故障信号, $ \pmb y(i, j) \in {\bf R}^{{n_y}} $为测量输出, $ \pmb z(i, j)\in {\bf R}^{{n_z}} $为被控输出, $ {A_1} $, $ {A_2} $, $ {B_{u1}} $, $ {B_{u2}} $, $ {B_{f1}} $, $ {B_{f2}} $, $ {B_{d1}} $, $ {B_{d2}} $, $ C $, $ {D_d} $, $ {D_f} $, $ E $, $ {F_u} $为已知的具有适当维数的常数矩阵.
注1. 对于FM模型, 由于状态向量$ \pmb x(i+1, j+1) $可以看做$ i $方向上对$ \pmb x(i, j+1) $或者是在$ j $方向上对$ \pmb x(i, j+1) $进行的一步前移运算, 故FM模型需要三个向量来描述[22].
本文目标是构造如下形式的故障检测滤波器/控制器:
$$ \begin{align} \hat{\pmb x}(i + 1, j + 1) = \, &{\hat A_1} \hat{\pmb x}(i, j + 1) + {\hat A_2} {\hat{\pmb x}}(i + 1, j) +\\ & {\hat B_1}\pmb y(i, j + 1) + {\hat B_2}\pmb y(i + 1, j) \\ \pmb u(i, j) = \, & {\hat C_c} \hat{\pmb x}(i, j) \\ \hat{\pmb y}(i, j) = \, & {\hat C_0} \hat{\pmb x}(i, j) \end{align} $$ (2) 其中, $ \hat{\pmb x}(i, j) \in {\bf R}^n $为状态估计, $ \pmb u(i, j) \in{\bf R}^{{n_u}} $为控制输入, $ \hat{\pmb y}(i, j) \in {\bf R}^{{n_y}} $是对输出的估计, $ {\hat A_1} $, $ {\hat A_2} $, $ {\hat B_1} $, $ {\hat B_2} $, $ {\hat C_0} $, $ {\hat C_c} $是待定的滤波器和控制器参数.
定义$ \bar{\pmb x}(i, j) = \left[{\begin{array}{*{20}{c}} {{\pmb x^{\rm T}(i, j)}}&{ \hat{\pmb x}^{\rm T}(i, j)}\end{array}}\right] ^{\rm T} $, 及残差信号$ \tilde{\pmb y}(i, j) = \pmb y(i, j) - \hat{\pmb y}(i, j), $结合式(1)和式(2)可得增广系统:
$$ \begin{align} \bar{\pmb x}(i + 1, j + 1) = \, & {\bar A_1}\bar{\pmb x}(i, j + 1) + {\bar A_2}\bar{\pmb x}(i+ 1, j)+\\ & {\bar B_{d1}}\pmb d(i, j + 1)+ {\bar B_{d2}}\pmb d(i + 1, j) +\\ & {\bar B_{f1}}\pmb f(i, j + 1)+ {\bar B_{f2}}\pmb f(i + 1, j)\\ \tilde{\pmb y}(i, j) = \, & \tilde C\bar{\pmb x}(i, j) + {\tilde D_d}\pmb d(i, j) + {\tilde D_f}\pmb f(i, j)\\ {\pmb z}(i, j) = \, & \tilde E \bar{\pmb x}(i, j) \end{align} $$ (3) 其中
$$ \begin{align} \, &{\bar A_1} = \left[ {\begin{array}{*{20}{c}} {{A_1}}&{{B_{u1}}{{\hat C}_c}}\\ {{{\hat B}_1}C}&{{{\hat A}_1}} \end{array}} \right], \; {\bar A_2} = \left[ {\begin{array}{*{20}{c}} {{A_2}}&{{B_{u2}}{{\hat C}_c}}\\ {{{\hat B}_2}C}&{{{\hat A}_2}} \end{array}} \right] \\ \, &{\bar B_{d1}} = \left[ {\begin{array}{*{20}{c}} {{B_d}_1}\\ {{{\hat B}_1}{D_d}} \end{array}} \right], \; {\bar B_{d2}} = \left[ {\begin{array}{*{20}{c}} {{B_d}_2}\\ {{{\hat B}_2}{D_d}} \end{array}} \right] \\ \, &{\bar B_{f1}} = \left[ {\begin{array}{*{20}{c}} {{B_{f1}}}\\ {{{\hat B}_1}{D_f}} \end{array}} \right], \; {\bar B_{f2}} = \left[ {\begin{array}{*{20}{c}} {{B_{f2}}}\\ {{{\hat B}_2}{D_f}} \end{array}} \right] \\ \, &\tilde C = [\begin{array}{*{20}{c}} C&{ - {{\hat C}_0}} \end{array}], \; {\tilde D_d} = {D_d} \\ \, &{\tilde D_f} = {D_f}, \; \tilde E = [\begin{array}{*{20}{c}} E&{{F_u}{{\hat C}_c}} \end{array}] \end{align} $$ (4) 2. 问题描述与预备知识
增广系统从故障$ \pmb f(i, j) $、干扰$ \pmb d(i, j) $到残差$ \tilde{\pmb y}(i, j) $和被控输出$ \pmb z(i, j) $的传递函数分别由下式给出:
$$ \begin{align} {G_{\tilde yf}}({\omega _1}, {\omega _2}) = \, &\tilde C{({z_1}{z_2}I - {z_2}{\bar A_1} -{z_1}{\bar A_2})^{-1}}({z_2}{\bar B_{f1}} +\\ & {z_1}{\bar B_{f2}}) +{\tilde D_f} \end{align} $$ (5) $$ \begin{align} {G_{\tilde yd}}({\omega _1}, {\omega _2}) = \, &\tilde C{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{d1}}+\\ & {z_1}{\bar B_{d2}}) + {\tilde D_d} \end{align} $$ (6) $$ \begin{align} {G_{zf}}({\omega _1}, {\omega _2}) = \, &\tilde E{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{f1}}+ {z_1}{\bar B_{f2}}) \end{align} $$ (7) $$ \begin{align} {G_{zd}}({\omega _1}, {\omega _2}) = \, &\tilde E{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{d1}}+ {z_1}{\bar B_{d2}}) \end{align} $$ (8) 其中, $ {z_1} = {{\rm e}^{j\omega_1}} $, $ {z_2} = {{\rm e}^{j\omega_2}} $.
本文要讨论的问题可归纳为:对于给定的二维FM系统, 设计故障检测滤波器/控制器(2), 使增广系统(3)渐近稳定, 同时满足如下控制指标和故障检测指标:
$$ \begin{align} &\inf {\sigma _{\min }}({G_{\tilde yf}}({\omega _1}, {\omega _2})) > {\gamma _1}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{11}}, \left| {{\omega _2}} \right| \le {\bar \omega _{12}} \end{align} $$ (9) $$ \begin{align} &\sup {\sigma _{\max }}({G_{zf}}({\omega _1}, {\omega _2})) < {\beta _1}, \; \forall \left| {{\omega _1}} \right| \le {\bar \omega _{11}}, \left| {{\omega _2}} \right| \le {\bar \omega _{12}} \end{align} $$ (10) $$ \begin{align} &\sup {\sigma _{\max }}({G_{\tilde yd}}({\omega _1}, {\omega _2})) < {\gamma _2}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{21}}, \left| {{\omega _2}} \right| \le {\bar \omega _{22}} \end{align} $$ (11) $$ \begin{align} &\sup {\sigma _{\max }}({G_{zd}}({\omega _1}, {\omega _2})) < {\beta _2}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{21}}, \left| {{\omega _2}} \right| \le {\bar \omega _{22}} \end{align} $$ (12) 这里, $ {\gamma _1} $, $ {\gamma _2} $, $ {\beta _1} $, $ {\beta _2} $是给定的正标量, $ {\bar \omega _{k1}} $, $ {\bar \omega _{k2}} \in \left[ {0, \pi } \right] $, $ k = 1, 2 $.
注2. 有限频$ {H_ - } $指标(9)和有限频$ {H_\infty} $指标(10)$ \sim $ (12)是相应全频域指标的推广, 当$ {\bar \omega _{11}} = \bar \omega _{12} = \bar \omega _{21} = \bar \omega _{22} = \pi $时, 有限频性能指标退化为全频性能指标.
注3. 式(9)和式(11)为故障检测性能指标, 这两个指标保证了发生在有限频域的故障对残差信号有足够大的影响, 同时外部干扰对残差信号的影响较小; 式(10)和式(12)为控制性能指标, 即抑制故障和干扰信号对被控输出的影响, 保证系统有一定的鲁棒性.
本文需要用到如下引理:
引理 1[23]. 对于给定的对称矩阵$ \Psi $和矩阵$ \Gamma $, $ \Lambda $, 存在矩阵$ X $, 满足$ \Psi + \Gamma X{\Lambda ^{\rm T}} + \Lambda {X^{\rm T}}\Gamma < 0 $, 当且仅当以下等式成立:
$$ \begin{align} {\Gamma ^ \bot }\Psi {\Gamma ^ \bot }^{\rm T} < 0 , {\Lambda ^ \bot }\Psi {\Lambda ^ \bot }^{\rm T} < 0 \end{align} $$ 引理 2[24]. 假设$ \pmb \xi \in {\bf R}^n $, $ P = {P^{\rm T}} \in {\bf R}^{n \times n} $, $ H \in {\bf R}^{m \times n} $, rank$ (H) = r < n $, 则下列命题等价:
i) $ {\pmb \xi ^{\rm T}}P\pmb \xi < 0, \; \; \forall H\pmb \xi = 0, \pmb \xi \ne 0 $
ii) $ \exists X\in {\bf R}^{n \times m}, \; \; P + X^{\rm T}H^{\rm T} + H {X} < 0 $
引理 3[25]. 对于增广系统(3), 假设存在条件$ \det ({z_1}{z_2}I - $ $ {z_2}{\bar A_1}-{z_1}{\bar A_2})^{- 1}\ne 0 $, $ \forall \left({{z_1}, {z_2}} \right) \in \Big\{ {\left( {{z_1}, {z_2}} \right) \in {{\bf C} \times {\bf {C}}}:\left| {{z_1}} \right| \ge 1, \left| {{z_2}} \right| \ge 1} \Big\} $, 给定对称矩阵$ {\Theta} $和标量$ {\bar \omega _1}, $ $ {\bar \omega _2} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {P_k}, $ $ {Q_k}>0 \in{ {{\bf {C}}}^{n \times n}} $, $ k = 1, 2 $, 使得下式成立:
$$ \begin{align} {\left[ {\begin{array}{*{20}{c}} {\bar A}&{{{\bar B}_f}}\\ I&0 \end{array}} \right]^{\rm T}}{\Sigma}\left[ {\begin{array}{*{20}{c}} {\bar A}&{{{\bar B}_f}}\\ I&0 \end{array}} \right] + {\Theta}< 0 \end{align} $$ (13) 其中
$$ \begin{equation} \begin{aligned} \bar A & = \left[ {{{\bar A}_1}, {{\bar A}_2}} \right], {\Sigma } = \left[ {\begin{array}{*{20}{c}} P&Q\\ *&\Delta \end{array}} \right]\\ P& = {P_1} + {P_2}, Q = \left[ {\begin{array}{*{20}{c}} {Q_1}&{Q_2} \end{array}} \right], {\bar B_f} = \left[ {\begin{array}{*{20}{c}} {\bar B_{f1}}&{\bar B_{f2}} \end{array}} \right]\\ \Delta& = {\rm diag}\left\{{-{P_1}-2\cos{{\bar\omega}_1}{Q_1}, -{P_2}- 2\cos{{\bar\omega}_2}{Q_2}} \right\}\\ \bar C & = {\rm diag}\left\{ {\tilde C, \tilde C} \right\}, {\bar D_f} = {\rm diag}\left\{ {{{\tilde D}_f}, {{\tilde D}_f}} \right\} \end{aligned} \end{equation} $$ (14) 则下面的有限频条件成立:
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {\bar G\left( {{\omega _1}, {\omega _2}} \right)}\\ {I\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right]^{\rm T} {\Theta} \left[ {\begin{array}{*{20}{c}} {\bar G\left( {{\omega _1}, {\omega _2}} \right)}\\ {I\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right] < 0, \; \forall ({\omega _1}, {\omega _2}) \in \Omega \end{equation} $$ (15) 其中
$$ \begin{equation} \begin{aligned} &\bar G\left( {{\omega _1}, {\omega _2}} \right) = {\left[ {\begin{array}{*{20}{c}} {{{\rm e}^{{\rm j}{\omega _2}}}G\left( {{\omega _1}, {\omega _2}} \right)}\\ {{{\rm e}^{{\rm j}{\omega _1}}}G\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right]}\\ &I\left( {{\omega _1}, {\omega _2}} \right) = \left[ {\begin{array}{*{20}{c}} {{{\rm e}^{{\rm j}{\omega _2}}}{I}}\\ {{{\rm e}^{{\rm j}{\omega _1}}}{I}} \end{array}} \right]\\ &G({\omega _1}, {\omega _2}) = ({{\rm e}^{{\rm j}({\omega _1} + {\omega _2})}}{I_n} - {{\rm e}^{{\rm j}{\omega _2}}}{{\bar A_1}}-\\ &\qquad \qquad {{\rm e}^{{\rm j}{\omega _1}}}{\bar A_2})^{ - 1}({{\rm e}^{{\rm j}{\omega _2}}}{\bar B_{f1}} + {{\rm e}^{{\rm j}{\omega _1}}}{\bar B_{f2}})\\ &\Omega = \left[ { - {{\bar \omega }_1}, {{\bar \omega }_1}} \right] \times \left[ { - {{\bar \omega }_2}, {{\bar \omega }_2}} \right] \end{aligned} \end{equation} $$ (16) 引理 4[26]. 若存在正定矩阵$ P_{s1}, P_{s2} $使得下式成立
$$ \begin{equation} {\left[ {\begin{array}{*{20}{c}} {\bar A}\\ I \end{array}} \right]^{\rm T}}\left[ {\begin{array}{*{20}{c}} P_s&0\\ 0&{{\rm diag}\left\{ { - {P_{s1}}, - {P_{s2}} }\right\}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar A}\\ I \end{array}} \right] < 0 \end{equation} $$ (17) 则增广系统(3)渐近稳定, 其中$ P_s = P_{s1}+P_{s2} $.
3. 主要结果
定理 1. 给定标量$ {\bar \omega _{11}} $, $ {\bar \omega _{12}} \in \left[ {0, \pi } \right] $, $ {\gamma _1} > 0 $, $ \alpha > 0 $, 如果存在对称矩阵$ {P_{k1}} $, $ {P_{k3}} $, $ {Q_{k1}} $, $ {Q_{k3}} $和矩阵$ {P_{k2}} $, $ {Q_{k2}} $, $ k = 1, 2 $, $ {G_1} $, $ {G_2} $, $ {G_3} $, $ {F_1} $, $ {F_2} $, $ {F_3} $, $ {F_4} $, $ {H_1} $, $ {H_2} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使不等式(18)$ \, \sim\, $(20)成立, 则增广系统(3)满足性能指标(9).
$$ \begin{equation} {\alpha ^2} - {\hat C_0}T < 0 \end{equation} $$ (18) $$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{Q_{k1}}}&{{Q_{k2}}}\\ {Q_{k2}^{\rm T}}&{{Q_{k3}}} \end{array}} \right] > 0, \quad k = 1, 2 \end{equation} $$ (19) $$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\gamma _{11}}}&{{\gamma _{12}}}&{{\gamma _{13}}}&{{\gamma _{14}}}&{{\gamma _{15}}}&{{\gamma _{16}}}&{{\gamma _{17}}}&{{\gamma _{18}}}\\ *&{{\gamma _{22}}}&{{\gamma _{23}}}&{{\gamma _{24}}}&{{\gamma _{25}}}&{{\gamma _{26}}}&{{\gamma _{27}}}&{{\gamma _{28}}}\\ *&*&{{\gamma _{33}}}&{{\gamma _{34}}}&{{\gamma _{35}}}&{{\gamma _{36}}}&{{\gamma _{37}}}&{{\gamma _{38}}}\\ *&*&*&{{\gamma _{44}}}&{{\gamma _{45}}}&{{\gamma _{46}}}&{{\gamma _{47}}}&{{\gamma _{48}}}\\ *&*&*&*&{{\gamma _{55}}}&{{\gamma _{56}}}&{{\gamma _{57}}}&{{\gamma _{58}}}\\ *&*&*&*&*&{{\gamma _{66}}}&{{\gamma _{67}}}&{{\gamma _{68}}}\\ *&*&*&*&*&*&{{\gamma _{77}}}&{{\gamma _{78}}}\\ *&*&*&*&*&*&*&{{\gamma _{88}}} \end{array}} \right] < 0 \end{equation} $$ (20) 其中
$$ \begin{align*} {\gamma _{11}} = \, & {P_{11}}+{P_{21}} - {G_1} - G_1^{\rm T}\\ {\gamma _{12}} = \, & {P_{12}}+{P_{22}} - {G_3} - G_2^{\rm T}\\ {\gamma _{13}} = \, & {Q_{11}} + {G_1}{A_1} + {\tilde B_1}C- F_1^{\rm T}\\ {\gamma _{14}} = \, & {Q_{12}} + {G_1}{B_{u1}}{\hat C_c} + {\tilde A_1}- F_2^{\rm T}\\ {\gamma _{15}} = \, & {Q_{21}} + {G_1}{A_2} + {\tilde B_2}C- F_3^{\rm T}\nonumber\\ {\gamma _{16}} = \, & {Q_{22}} + {G_1}{B_{u2}}{\hat C_c} + {\tilde A_2}- F_4^{\rm T}\\ {\gamma _{17}} = \, & {G_1}{B_{f1}} + {\tilde B_1}{D_f} -H_1^{\rm T}\nonumber\\ {\gamma _{18}} = \, & {G_1}{B_{f2}} + {\tilde B_2}{D_f} -H_2^{\rm T}\nonumber\\ {\gamma _{22}} = \, & {P_{13}}+{P_{23}} - {G_3} - G_3^{\rm T}\\ {\gamma _{23}} = \, & Q_{12}^{\rm T} -G_{3}^{\rm T}+ {G_2}{A_1} + {\tilde B_1}C\nonumber\\ {\gamma _{24}} = \, & {Q_{13}}-{G_{3}^{\rm T}}+{G_2}{B_{u2}}{\hat C_c} +{\tilde A_1}\\ {\gamma _{25}} = \, & Q_{22}^{\rm T} -{G_{3}^{\rm T}}+ {G_2}{A_2} + {\tilde B_2}C\\ {\gamma_{26}} = \, & {G_2}{B_{u2}}{\hat C_c} + {\tilde A_2} + {Q_{23}}-G_3^{\rm T} \end{align*} $$ $$ \begin{align} {\gamma _{27}} = \, & {G_2}{B_{f1}} + {\tilde B_1}{D_f}\\ {\gamma _{28}} = \, & {G_2}{B_{f2}} + {\tilde B_2}{D_f}\\ {\gamma_{33}} = \, & - {P_{11}} - 2\cos {\bar\omega _{11}}{Q_{11}} - {C^{\rm T}}C+\\ & {F_1}{A_1} + {\tilde B_1}C + {({F_1}{A_1} + {\tilde B_1}C)^{\rm T}}\\ {\gamma _{34}} = \, & - {P_{12}} - 2\cos {\bar\omega _{12}}{Q_{12}} - {C^{\rm T}}{\hat C_0}+\\ & ({F_1}{B_{u1}}{\hat C_c} + {\tilde A_1}) + {({F_2}{A_1} + {\tilde B_1}C)^{\rm T}}\\ {\gamma _{35}} = \, & {({F_3}{A_1} + {\tilde B_1}C)^{\rm T}} + {F_1}{A_2} + {\tilde B_2}C\\ {\gamma _{36}} = \, & {F_1}{B_{u2}}{\hat C_c} + {\tilde A_2} + {({F_4}{A_1} + {\tilde B_1}C)^{\rm T}} \\ {\gamma _{37}} = \, &{F_1}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{A_1})^{\rm T}} -{{C}^{\rm T}}{D_f}\\ {\gamma _{38}} = \, &{F_1}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{A_1})^{\rm T}}\\ {\gamma _{44}} = \, & - {P_{13}} - 2\cos {\bar\omega_{11}}{Q_{13}} +{F_2}{B_{u1}}{\hat C_c} + {\tilde A_1}+\\ & {({F_2}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} - {\alpha ^2}I \\ {\gamma _{45}} = \, & ({F_2}{A_2} + {\tilde B_2}C) + {({F_3}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}}\\ {\gamma _{46}} = \, &{F_2}{B_{u2}}{\hat C_c} + {\tilde A_2} + {({F_4}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} \\ {\gamma _{47}} = \, & {F_2}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{B_{u1}}{\hat C_c})^{\rm T}} + {{\hat C_0}^{\rm T}}{D_f} \\ {\gamma _{48}} = \, & {F_2}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{B_{u1}}{\hat C_c})^{\rm T}} \\ {\gamma _{55}} = \, & - {P_{21}} - 2\cos {\bar\omega _{11}}{Q_{21}} + {F_3}{A_2} + {\tilde B_2}C +\\ & {({F_3}{A_2} + {\tilde B_2}C)^{\rm T}} - {C^{\rm T}}C \\ {\gamma _{56}} = \, & - {P_{22}} - 2\cos {\bar\omega _{12}}{Q_{22}} + {F_3}{B_{u2}}{\hat C_c}+ {\tilde A_2}+\\ & {C^{\rm T}}{\hat C_0} + {({F_4}{A_2} + {\tilde B_2}C)^{\rm T}} \\ {\gamma _{57}} = \, & {F_3}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{A_2})^{\rm T}} \\ {\gamma _{58}} = \, & {F_3}{B_{f2}} + {({H_2}{A_2})^{\rm T}} + {\tilde B_2}{D_f} - {{C}^{\rm T}}{D_f}\\ {\gamma _{66}} = \, & - {P_{23}} - 2\cos {\bar\omega _{12}}{Q_{23}} - {{\alpha ^2}I } + {F_4}{B_{u2}}{\hat C_c}+\\ & {\tilde A_2} + {({F_4}{B_{u2}}{\hat C_c} + {\tilde A_2})^{\rm T}}, \\ {\gamma _{67}} = \, & {F_4}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{B_{u2}}{\hat C_c})^{\rm T}}\\ {\gamma _{68}} = \, &{F_4}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{B_{u2}}{\hat C_c})^{\rm T}} + {{\hat C_0}}{D_f} \\ {\gamma _{77}} = \, & {H_1}{B_{f1}} + {({H_1}{B_{f1}})^{\rm T}} + {\gamma _1}^2I - {D_f}^{\rm T}{D_f} \\ {\gamma _{78}} = \, & {H_1}{B_{f2}} + {({H_2}{B_{f1}})^{\rm T}}\\ {\gamma _{88}} = \, & {H_2}{B_{f2}} + {({H_2}{B_{f2}})^{\rm T}} + {\gamma _1}^2I - {D_f}^{\rm T}{D_f} \end{align} $$ (21) 证明. 令式(13)中的
$$ \begin{equation*} \begin{aligned} \Theta = \, &\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_f}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} {-I}&0\\ 0&{\gamma _1}^2I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_f}\\ I&0 \end{array}} \right] \end{aligned} \end{equation*} $$ 则有限频条件(15)等价于$ {{G^{\rm T}}_{\tilde yf}}({\omega _1}, {\omega _2}){G}_{\tilde yf}({\omega _1}, {\omega _2})>{\gamma _1}^2I $, 即性能指标(9).由引理3知, 若式(13)成立, 则增广系统(3) $满足性能指标(9).式(13)可改写为
$$ \begin{equation} \begin{aligned} {\Lambda^{\rm T}}\Omega \ {\Lambda } < 0 \end{aligned} \end{equation} $$ (22) 其中
$$ \begin{align*} \Lambda = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_f^{\rm T}}&0&I \end{array}} \right]^{\rm T} \end{align*} $$ $$ \begin{align*} \Omega = \, & \left[ {\begin{array}{*{20}{c}} I&0\\ 0&I\\ 0&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} P&Q\\ *&\Delta \end{array}} \right]\left[ {\begin{array}{*{20}{c}} I&0&0\\ 0&I&0 \end{array}} \right]+\\ & \left[ {\begin{array}{*{20}{c}} 0&0\\ {{{\bar C}^{\rm T}}}&0\\ {\bar D_f^{\rm T}}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { - I}&0\\ *&{{\gamma _1}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} 0&{\bar C}&{{\bar D_f}}\\ 0&0&I \end{array}} \right] \end{align*} $$ 令
$$ \begin{equation*} \Gamma = \left[ {\begin{array}{*{20}{c}} { - I}&{\bar A}&{{{\bar B}_f}} \end{array}} \right]^{\rm T}, \quad \pmb \eta = \Lambda \pmb \xi \end{equation*} $$ 则有$ {\Gamma ^{{\rm T}}}\pmb \eta = {\Gamma ^{{\rm T}}}\Lambda \pmb \xi = 0 $.根据引理2, 若以下不等式成立:
$$ \begin{equation*} \Omega + \Gamma {\rm X} + {{\rm X}^{\rm T}}{\Gamma ^{\rm T}} < 0 \end{equation*} $$ 则式(22)成立.取$ {X} = \left[ {\begin{array}{*{20}{c}} {{G^{\rm T}}}&{{F^{\rm T}}}&{{H^{\rm T}}} \end{array}} \right] $,
$$ \begin{equation*} \begin{aligned} G = \left[ {\begin{array}{*{20}{c}} {{G_1}}&{{G_3}}\\ {{G_2}}&{{G_3}} \end{array}} \right], F = \left[ {\begin{array}{*{20}{c}} {{F_1}}&{{G_3}}\\ {{F_2}}&{{G_3}}\\ {{F_3}}&{{G_3}}\\ {{F_4}}&{{G_3}} \end{array}} \right], H = \left[ {\begin{array}{*{20}{c}} {{H_1}}&0\\ {{H_2}}&0 \end{array}} \right] \end{aligned} \end{equation*} $$ 令$ {\tilde A_k} = {G_3}{\hat A_k} $, $ {\tilde B_k} = {G_3}{\hat B_k} $, $ k = 1, 2 $, 并将式(4)中相关矩阵代入, 可得
$$ \begin{equation*} \left[ {\begin{array}{*{20}{c}} {{\gamma _{11}}}&{{\gamma _{12}}}&{{\gamma _{13}}}&{{\gamma _{14}}}&{{\gamma _{15}}}&{{\gamma _{16}}}&{{\gamma _{17}}}&{{\gamma _{18}}}\\ *&{{\gamma _{22}}}&{{\gamma _{23}}}&{{\gamma _{24}}}&{{\gamma _{25}}}&{{\gamma _{26}}}&{{\gamma _{27}}}&{{\gamma _{28}}}\\ *&*&{{\gamma _{33}}}&{{\gamma _{34}}}&{{\gamma _{35}}}&{{\gamma _{36}}}&{{\gamma _{37}}}&{{\gamma _{38}}}\\ *&*&*&{{{\tilde \gamma }_{44}}}&{{\gamma _{45}}}&{{\gamma _{46}}}&{{\gamma _{47}}}&{{\gamma _{48}}}\\ *&*&*&*&{{\gamma _{55}}}&{{\gamma _{56}}}&{{\gamma _{57}}}&{{\gamma _{58}}}\\ *&*&*&*&*&{{{\tilde \gamma }_{66}}}&{{\gamma _{67}}}&{{\gamma _{68}}}\\ *&*&*&*&*&*&{{\gamma _{77}}}&{{\gamma _{78}}}\\ *&*&*&*&*&*&*&{{\gamma _{88}}} \end{array}} \right] < 0 \end{equation*} $$ 其中
$$ \begin{equation*} \begin{aligned} {\tilde \gamma _{44}} = \, & - {P_{13}} - 2\cos {\bar \omega _{11}}{Q_{13}} +{F_2}{B_{u1}}{\hat C_c} + {\tilde A_1}+\\ & {({F_2}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} - \hat C_0^{\rm T}{\hat C_0}\\ {\tilde \gamma _{66}} = \, & - {P_{23}} - 2\cos {\bar \omega _{12}}{Q_{23}} -{\hat C_0}^{\rm T}{\hat C_0} + {F_4}{B_{u2}}{\hat C_c}+\\ & {\tilde A_2} + {({F_4}{B_{u2}}{\hat C_c} + {\tilde A_2})^{\rm T}}\\ \end{aligned} \end{equation*} $$ 其他参数在式(21)中给出.需要注意的是$ {\tilde \gamma _{44}} $、$ {\tilde \gamma _{66}} $中存在耦合项$ \hat C_0^{\rm T}{\hat C_0} $.下面采用文献[27]中提出的方法, 给出处理耦合项的方案.假设$ {\hat C_0} $为行向量, 首先给出$ \hat C_0^{\rm T}{\hat C_0} $的上界, 即
$$ \begin{equation} \hat C_0^{\rm T}{\hat C_0} > {\alpha ^2}I \end{equation} $$ (23) 上式表明$ {\hat C_0} $的可行解是非凸的, 令
$$ {\hat C_0}T - {\left\| T \right\|_2}^2 = 0 $$ 其中, $ {\left\| T \right\|_2} = \alpha $表示半径为$ \alpha $的球的切平面, 则通过约束条件(18)即可找到式(23)的解的凸子集.由引理3可知, 若式(18)$ \, \sim\, $(20)成立, 则增广系统(3)满足性能指标(9).
注4. 该方法需要假设$ {\hat C_0} $为行向量, 即系统为单输入, 具有一定的局限性.
接下来考虑系统故障检测的鲁棒性条件.令$ \pmb f(i, j) = 0 $, 则增广系统变为
$$ \begin{align} \bar{\pmb x}(i + 1, j + 1) = \, &{\bar A_1}\pmb x(i, j + 1) + {\bar A_2} \pmb x(i + 1, j)+\\ & {\bar B_{d1}}\pmb d(i, j + 1) + {\bar B_{d2}}\pmb d(i + 1, j) \end{align} $$ (24) 下面定理给出增广系统(3)满足性能指标(11)的充分条件.
定理 2. 给定标量$ {\bar \omega_{21}} $, $ {\bar\omega_{22}}\in\left[{0, \pi}\right] $, $ {\gamma_2}>0 $, 如果存在对称矩阵$ {P_{m1}} $, $ {P_{m2}} $, $ {Q_{m1}>0} $, $ {Q_{m2}}>0 $, 矩阵$ {M_1} $, $ {M_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使不等式(25)成立, 则增广系统(3)满足性能指标(11).
$$ \begin{equation*} \left[ {\begin{array}{*{20}{c}} {{\Gamma _{11}}}&{{\Gamma _{12}}}&{{\Gamma _{13}}}&0\\ *&{{\Delta _m}}&0&{{\Gamma _{24}}}\\ *&*&{ - {\gamma _2}^2I}&{{\Gamma _{34}}}\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation*} $$ (25) 其中
$$ \begin{equation*} \begin{aligned} \Gamma _{11} = \, & {P_{m1}} + {P_{m2}} - He\left[ {\begin{array}{*{20}{c}} {{M_1}}&{{G_3}}\\ {{M_2}}&{{G_3}} \end{array}} \right]\\ {\Gamma _{12}} = \, & \left[ {\begin{array}{*{20}{c}} {{Q_{m1}}}&{{Q_{m2}}} \end{array}} \right]+\left[ {\begin{array}{*{20}{c}} {{\Gamma_{m1}}}&{{\Gamma_{m2}}} \end{array}} \right]\\ {{\Gamma_{m1}}} = \, &\left[\begin{array}{cc} {{M_1}{A_1} + {{\tilde B}_1}C}&{{M_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{M_2}{A_1} + {{\tilde B}_1}C}&{{M_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {{\Gamma_{m2}}} = \, &\left[\begin{array}{cc} {{M_1}{A_2} + {{\tilde B}_2}C}&{{M_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{M_2}{A_2} + {{\tilde B}_2}C}&{{M_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right]\\ \Gamma _{13} = \, &\left[ {\begin{array}{*{20}{c}} {{M_1}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{M_1}{B_{d2}} + {{\tilde B}_2}{D_d}}\\ {{M_2}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{M_2}{B_{d2}} + {{\tilde B}_2}{D_d}} \end{array}} \right]\\ {\Gamma _{24}} = \, &\left[ {\begin{array}{*{20}{c}} {{C^{\rm T}}}&0\\ { - {{\hat C}_0}^{\rm T}}&0\\ 0&{{C^{\rm T}}}\\ 0&{ - {{\hat C}_0}^{\rm T}} \end{array}} \right], {\Gamma _{34}} = {\rm diag}\left\{ {{{\tilde D}_d}, {{\tilde D}_d}} \right\} \end{aligned} \end{equation*} $$ 证明. 由引理3知, 若存在矩阵
$$ \begin{align*} {P_m} = \, & {P_{m1}} + {P_{m2}}, {Q_m} = \left[ {\begin{array}{*{20}{c}} {{Q_{m1}}}&{{Q_{m2}}}\end{array}}\right], \\ {\Delta _m} = \, & {\rm diag}\Big\{ - {P_{m1}} - 2\cos {{\bar \omega }_{21}}{Q_{m1}}, - {P_{m2}} - \\& 2\cos {{\bar \omega }_{22}}{Q_{m2}} \Big\} \end{align*} $$ 使如下不等式成立:
$$ \begin{equation*} \begin{aligned} &\left[ {\begin{array}{*{20}{c}} {\bar A}&{\bar B_d}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} P_m&Q_m\\ *&\Delta_m \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar A}&{\bar B_d}\\ I&0 \end{array}} \right]+\\ & \qquad \left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_d}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\gamma _2}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_d}\\ I&0 \end{array}} \right]<0 \end{aligned} \end{equation*} $$ 则增广系统(3)满足性能指标(11).上式可改写为
$$ \begin{equation} {{\Upsilon} ^{\rm T}}{\Omega_1} {\Upsilon } < 0 \end{equation} $$ (26) 其中
$$ \begin{equation*} \begin{aligned} \Upsilon = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_d^{\rm T}}&0&I \end{array}} \right]^{\rm T}\\ {\Omega_1} = \, & \left[ {\begin{array}{*{20}{c}} I&0\\ 0&I\\ 0&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} P_m&Q_m\\ *&\Delta_m \end{array}} \right]\left[ {\begin{array}{*{20}{c}} I&0&0\\ 0&I&0 \end{array}} \right]+\\ & \left[ {\begin{array}{*{20}{c}} 0&0\\ {{{\bar C}^{\rm T}}}&0\\ {\bar D_d^{\rm T}}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { I}&0\\ *&{{-\gamma _2}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} 0&{\bar C}&{{\bar D_d}}\\ 0&0&I \end{array}} \right]\\ {\bar B_d} = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar B}_{d1}}}&{{{\bar B}_{d2}}} \end{array}} \right]\\ {\bar D_d} = \, & \left[ {\begin{array}{*{20}{c}} {{{\tilde D}_d}}&0\\ 0&{{{\tilde D}_d}} \end{array}} \right] \end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \Gamma_m = {\left[ {\begin{array}{*{20}{c}} { - I}&{\bar A}&{{{\bar B}_d}} \end{array}} \right]}^{\rm T} \end{equation*} $$ 则$ {{\Gamma_m}^ \bot } = \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_d^{\rm T}}&0&I \end{array}} \right] $.根据引理1, 下式与式(26)等价,
$$ \begin{equation*} {\Omega_1}+ He\left( {\Gamma_m {M^{\rm T}}{Z ^{\rm T}}} \right) < 0 \end{equation*} $$ (27) 取$ Z = \left[ {\begin{array}{*{20}{c}} I&0&0 \end{array}} \right]^{\rm T} $, $ M = \left[ {\begin{array}{*{20}{c}} {{M_1}}&{{G_3}}\\ {{M_2}}&{{G_3}} \end{array}} \right] $, 并令$ {\tilde A_k} = {G_3}{\hat A_k} $, $ {\tilde B_k} = {G_3}{\hat B_k} $, $ k = 1, 2 $, 利用Schur $补引理可证.
定理 3. 给定标量$ {\bar \omega_{11}} $, $ {\bar\omega_{12}}\in\left[{0, \pi}\right] $, $ {\beta _1} > 0 $, 如果存在对称矩阵$ {P_{r1}} $, $ {P_{r2}} $, $ {Q_{r1}>0} $, $ {Q_{r2}>0} $, 矩阵$ {R_1} $, $ {R_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使得不等式(26)成立, 则增广系统(3)满足性能指标(10).
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Xi _{11}}}&{{\Xi _{12}}}&{{\Xi _{13}}}&0\\ *&{{\Delta _r}}&0&{{\Xi _{24}}}\\ *&*&{ - \beta_1^2I}&0\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation} $$ (28) 其中
$$ \begin{equation*} \begin{aligned} {\Xi _{11}} = \, & {P_{r1}} + {P_{r2}} - He\left[ {\begin{array}{*{20}{c}} {{R_1}}&{{G_3}}\\ {{R_2}}&{{G_3}} \end{array}} \right]\\ {\Xi _{12}} = \, & \left[ {\begin{array}{*{20}{c}} {{Q_{r1}}}&{{Q_{r2}}} \end{array}} \right]+ \left[ {\begin{array}{*{20}{c}} {{\Xi_{r1}}}&{{\Xi_{r2}}} \end{array}} \right]\\ {{\Xi_{r1}}} = \, &\left[\begin{array}{cc} {{R_1}{A_1} + {{\tilde B}_1}C}&{{R_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{R_2}{A_1} + {{\tilde B}_1}C}&{{R_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {{\Xi_{r2}}} = \, &\left[\begin{array}{cc} {{R_1}{A_2} + {{\tilde B}_2}C}&{{R_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{R_2}{A_2} + {{\tilde B}_2}C}&{{R_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right] \nonumber\\ {\Xi _{13}} = \, &\left[ {\begin{array}{*{20}{c}} {{R_1}{B_{f1}} + {{\tilde B}_1}{D_f}}&{{R_1}{B_{f2}} + {{\tilde B}_2}{D_f}}\\ {{R_2}{B_{f1}} + {{\tilde B}_1}{D_f}}&{{R_2}{B_{f2}} + {{\tilde B}_2}{D_f}} \end{array}} \right]\\ {\Xi _{24}} = \, & \left[ {\begin{array}{*{20}{c}} {{E^{\rm T}}}&0\\ { ({F_u}\hat C_c)^{\rm T}}&0\\ 0&{{E^{\rm T}}}\\ 0&{ ({F_u}\hat C_c)^{\rm T}} \end{array}} \right]\end{aligned} \end{equation*} $$ $$ \begin{equation*} {\Delta _r} = {\rm diag}\{ { - {P_{r1}} - 2\cos {{\bar \omega }_{11}}{Q_{r1}}, - {P_{r2}} - 2\cos {{\bar \omega }_{12}}{Q_{r2}}} \} \end{equation*} $$ 证明. 参考定理2证明过程.
定理 4. 给定标量$ {\bar \omega_{21}} $, $ {\bar\omega_{22}}\in\left[{0, \pi}\right] $, $ {\beta _2} > 0 $, 如果存在对称矩阵$ {P_{u1}} $, $ {P_{u2}} $, $ {Q_{u1}>0} $, $ {Q_{u2}}>0 $, 矩阵$ {U_1} $, $ {U_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使得不等式(27)成立, 则增广系统$ (3)满足性能指标(12).
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Omega _{11}}}&{{\Omega _{12}}}&{{\Omega _{13}}}&0\\ *&{{\Delta _u}}&0&{{\Xi _{24}}}\\ *&*&{ - \beta _2^2I}&0\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation} $$ (29) 其中
$$ \begin{equation*} \begin{aligned} {\Omega _{11}} = \, & {P_{u1}} + {P_{u2}} - He\left[ {\begin{array}{*{20}{c}} {{U_1}}&{{G_3}}\\ {{U_2}}&{{G_3}} \end{array}} \right]\\ {\Omega _{12}} = \, &\left[ {\begin{array}{*{20}{c}} {{Q_{u1}}}&{{Q_{u2}}} \end{array}} \right]+\left[ {\begin{array}{*{20}{c}} {\Omega _{u1}}&{\Omega _{u2}} \end{array}} \right]\\ {\Omega _{u1}} = \, &\left[\begin{array}{cc} {{U_1}{A_1} + {{\tilde B}_1}C}&{{U_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{U_2}{A_1} + {{\tilde B}_1}C}&{{U_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {\Omega _{u2}} = \, &\left[\begin{array}{cc} {{U_1}{A_2} + {{\tilde B}_2}C}&{{U_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{U_2}{A_2} + {{\tilde B}_2}C}&{{U_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right] \nonumber\\ {\Omega _{13}} = \, & \left[ {\begin{array}{*{20}{c}} {{U_1}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{U_1}{B_{d2}} + {{\tilde B}_2}{D_d}}\\ {{U_2}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{U_2}{B_{d2}} + {{\tilde B}_2}{D_d}} \end{array}} \right] \end{aligned} \end{equation*} $$ $$ \begin{equation*} {\Delta _u} = {\rm diag}\{ { - {P_{u1}} - 2\cos {{\bar \omega }_{21}}{Q_{u1}}, - {P_{u2}} - 2\cos {{\bar \omega }_{22}}{Q_{u2}}} \} \end{equation*} $$ 证明. 参考定理2证明过程.
定理1~4给出了故障检测滤波器/控制器设计需满足的有限频域性能条件, 由于广义KYP引理并不隐含系统的稳定性[28], 因此这些条件并不能保证所设计的系统是稳定的.下面给出增广系统(3)渐近稳定的充分条件:
定理 5. 如果存在正定矩阵$ { P_{s1}} $, $ { P_{s2}} $, 矩阵$ {S_1} $, $ {S_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $使不等式(28)成立, 则增广系统(3)渐近稳定.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Psi _{11}}}&{{\Psi _{12}}}\\ *&{{\Psi _{22}}} \end{array}} \right] < 0 \end{equation} $$ (30) 其中
$$ \begin{equation*} \begin{aligned} {\Psi _{11}} = \, & { P_{s1}} + { P_{s2}} - \left[ {\begin{array}{*{20}{c}} {{S_1} + S_1^{\rm T}}&{{G_3} + S_2^{\rm T}}\\ {G_3^{\rm T} + {S_2}}&{G_3^{\rm T} + {G_3}} \end{array}} \right]\\ {\Psi _{12}} = \, & \left[ {\begin{array}{*{20}{c}} \Psi _{s1}&\Psi _{s2} \end{array}} \right]\\ \Psi _{s1} = \, & \left[\begin{array}{cc} {{S_1}{A_1} + {{\tilde B}_1}C}&{{{\tilde A}_1}+{S_1}{B_{u1}}{\hat C_c}}\\ {{S_2}{A_1} + {{\tilde B}_1}C}&{{{\tilde A}_1}+{S_2}{B_{u1}}{\hat C_c}}\\ \end{array}\right]\\ \Psi _{s2} = \, & \left[\begin{array}{cc} {{S_1}{A_2} + {{\tilde B}_2}C}&{{{\tilde A}_2}+{S_1}{B_{u2}}{\hat C_c}}\\ {{S_2}{A_2} + {{\tilde B}_2}C}&{{{\tilde A}_2}+{S_2}{B_{u2}}{\hat C_c}}\\ \end{array}\right] \nonumber\\ {\Psi _{22}} = \, & {\rm diag}\{ { - {{ P}_{s1}}, - {{ P}_{s2}}} \}\end{aligned} \end{equation*} $$ 证明. 由引理4及引理1易证.
4. 解决方案
4.1 算法
上述定理中得到的矩阵不等式为非凸的, 为了解决该难题, 采取两步算法进行求解:
步骤1. 设计状态反馈控制器, 使闭环系统(32)满足控制性能指标(10)和(12), 得到控制器参数$ {\hat C_c} $.
设计如下形式的状态反馈控制器:
$$ \begin{equation} \pmb u(i, j) = {\hat C_c}\pmb x(i, j) \end{equation} $$ (31) 可得闭环系统:
$$ \begin{align} \pmb x(i + 1, j + 1) = \, &({A_1} + {B_{u1}}{{\hat C}_c})\pmb x(i, j + 1) +\\ & ({A_2} + {B_{u2}}{{\hat C}_c})\pmb x(i + 1, j)+\\ & {B_{d1}}\pmb d(i, j + 1) + {B_{d2}}\pmb d(i + 1, j)+\\ & {B_{f1}}\pmb f(i, j + 1) + {B_{f2}}\pmb f(i + 1, j)\\ \pmb z(i, j) = \, &(E + {F_u}{{\hat C}_c})\pmb x(i, j)+{F_f}\pmb f(i , j) \end{align} $$ (32) 定义矩阵
$$ \begin{equation*} \begin{aligned} \hat A = \, & \left[ {\begin{array}{*{20}{c}} {{A_1} + {B_{u1}}{{\hat C}_c}}&{{A_2} + {B_{u2}}{{\hat C}_c}} \end{array}} \right] = \left[ {{\hat A_{1}}, {\hat A_{2}}} \right]\\ F_f = \, &0, \hat F_f = \left[ {\begin{array}{*{20}{c}} {F_f}&0\\ 0&{F_f} \end{array}} \right] \\\hat E = \, & \left[ {\begin{array}{*{20}{c}} {E + {F_u}{{\hat C}_c}}&0\\ 0&{E + {F_u}{{\hat C}_c}} \end{array}} \right], {\hat B_f} = \left[ {{B_{f1}}, {B_{f2}}} \right]\end{aligned} \end{equation*} $$ 定理 6. 给定标量$ {\beta _1} > 0 $, $ {\bar \omega _{11}}, {\bar \omega _{12}} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {\bar P_1} $, $ {\bar P_2} $及$ {\bar Q_1}>0 $, $ {\bar Q_2}>0 $, 矩阵$ {X} $, $ {Y} $, $ {V_{i}} $, $ i = 1, \cdots , 7 $, 使不等式(31)成立, 则系统(32) $满足性能指标(10).此外, 若式(31)成立, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Phi _{11}}}&{{\Phi _{12}}}&{{\Phi _{13}}}&{{\Phi _{14}}}&{{\Phi _{15}}}&{{\Phi _{16}}}&{{\Phi _{17}}}\\ *&{{\Phi _{22}}}&{{\Phi _{23}}}&{{\Phi _{24}}}&{{\Phi _{25}}}&{{\Phi _{26}}}&{{\Phi _{27}}}\\ *&*&{{\Phi _{33}}}&{{\Phi _{34}}}&{{\Phi _{35}}}&{{\Phi _{36}}}&{{\Phi _{37}}}\\ *&*&*&{{\Phi _{44}}}&{{\Phi _{45}}}&{{\Phi _{46}}}&{{\Phi _{47}}}\\ *&*&*&*&{{\Phi _{55}}}&{{\Phi _{56}}}&{{\Phi _{57}}}\\ *&*&*&*&*&{{\Phi _{66}}}&{{\Phi _{67}}}\\ *&*&*&*&*&*&{{\Phi _{77}}} \end{array}} \right] < 0 \end{equation} $$ (33) 其中
$$ \begin{align*} {\Phi _{11}} = \, & {\bar P_1} + {\bar P_2}- {X} - X^{\rm T} , {\Phi _{12}} = {\bar Q_1}\\ {\Phi _{13}} = \, & - V_{1}^{\rm T}, {\Phi _{14}} = 0\\ {\Phi _{15}} = \, & {({A_1}{X} +{B_{f1}}{V_1}+{B_{u1}}{Y})^{\rm T}}+{\bar {Q_2}} \\ {\Phi _{16}} = \, &{({EX + {F_u}Y})^{\rm T}}, \Phi_{17} = 0, \\ {\Phi _{22}} = \, & -\bar P_1-2\cos{\bar \omega_{11}} \bar Q_1-X-X^{\rm T}\\ \Phi_{23} = \, &0, {\Phi _{24}} = - V_{5}^{\rm T}\\ {\Phi _{25}} = \, & {({A_2}{X} + {B_{f2}}{V_5} +{B_{u2}}{Y})^{\rm T}}, \Phi_{26} = 0\\ {\Phi _{27}} = \, & {({EX + {F_u}Y})^{\rm T}}, {\Phi _{33}} = I- {V_{2}} - {V_{2}}^{\rm T} \end{align*} $$ $$ \begin{align*} \Phi_{34} = \, &0, {\Phi _{35}} = -{V_{3}} + (B_{f1}V_2)^{\rm T}, \Phi_{36} = 0 \\ {\Phi _{37}} = \, & - {V_{4}}, {\Phi _{44}} = I- {V_{6}} - {V_{6}}^{\rm T}\\ {\Phi _{45}} = \, &{({B_{f2}}{V_{6}})^{\rm T}}, {\Phi _{46}} = - {V_{7}} , \Phi_{47} = 0\\ {\Phi _{55}} = \, &-\bar{P_2}-2\cos\bar{\omega}_{12}\bar{Q}_2+B_{f1}V_3+(B_{f1}V_3)^{\rm T}\\ {\Phi _{56}} = \, & {B_{f2}}{V_{7}}, {\Phi _{57}} = {B_{f1}}{V_{4}}, {\Phi _{66}} = - \beta _1^2I\\ \Phi_{67} = \, &0, {\Phi _{77}} = - \beta _1^2I \end{align*} $$ 证明. 根据广义KYP引理的对偶形式, 若下式
$$ \begin{align} &\left[ {\begin{array}{*{20}{c}} {\hat A}&{I}\\ {\hat E}&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} \bar P&\bar Q\\ *&\bar \Delta \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\hat A}&{I}\\ {\hat E}&0 \end{array}} \right]^{\rm T}+\\ & \qquad \left[ {\begin{array}{*{20}{c}} {\hat B_f}&{0}\\ {\hat F_f}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\beta _1}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\hat B_f}&{0}\\ {\hat F_f}&I \end{array}} \right]^{\rm T}<0 \end{align} $$ (34) 成立, 则系统(32)满足性能指标(10).式(34)可写为
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right] K \left[ {\begin{array}{*{20}{c}} {{\Sigma _1}}&0\\ 0&{{\Pi _1}} \end{array}} \right]{K ^{\rm T}}{\left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right]^{\rm T}} < 0 \end{equation} $$ (35) 其中
$$ \begin{equation*} \begin{aligned} K = \, &\left[{\begin{array}{*{20}{c}} I&0&0&0&0&0&0\\ 0&I&0&0&0&0&0\\ 0&0&0&I&0&0&0\\ 0&0&0&0&I&0&0\\ 0&0&I&0&0&0&0\\ 0&0&0&0&0&I&0\\ 0&0&0&0&0&0&I \end{array}} \right]\\ \Sigma_1 = \, &\left[ {\begin{array}{*{20}{c}} \bar P&\bar Q\\ *&\bar \Delta \end{array}} \right], \Pi_1 = \left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\beta _1}^2I} \end{array}} \right]\\ S = \, &\left[ {\begin{array}{*{20}{c}} {\hat A}&{{{\hat B}_f}}\\ {\hat E}&{0} \end{array}} \right] = \\ \, & \left[ {\begin{array}{*{20}{c}} {A_1}&{A_{2}}&{B_{f1}}&{B_f}\\E&0&0&0\\0&E&0&0 \end{array}} \right]+\\ &\left[ {\begin{array}{*{20}{c}} {B_{u1}}&{B_{u2}}\\{F_{u}}&{0}\\0&{F_u} \end{array}} \right] \left[ {\begin{array}{*{20}{c}} {\hat C_c}&{0}\\{0}&{\hat C_c} \end{array}} \right] \left[ {\begin{array}{*{20}{c}} I&0&0&0\\0&I&0&0 \end{array}} \right] = \\ \, &\mathscr{A}+\mathscr{B}L\mathscr{C}\end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} {X_1} = {\{{\mathscr{C}}^\dagger XR+(I-{\mathscr{C}^ \dagger}\mathscr{C})V\} } , \quad Y = {\hat C_c}X \end{aligned} \end{equation*} $$ 则
$$ \begin{equation*} \begin{aligned} SX_1 = \mathscr{A}X_1+\mathscr{B}YR \end{aligned} \end{equation*} $$ 由于$ \mathscr{C} = \left[ {\begin{array}{*{20}{c}} I&0&0&0\\0&I&0&0 \end{array}} \right] $, 故$ \mathscr{C}^\dagger = \left[ {\begin{array}{*{20}{c}} I&0\\0&I\\0&0\\0&0 \end{array}} \right] $, 因此可得
$$ \begin{equation*} \begin{aligned} {X_1} = \, &\left[ {\begin{array}{*{20}{c}} {XR_1}\\ {XR_2} \\{ V_a}\\{ V_b} \end{array}} \right] \end{aligned} \end{equation*} $$ 令$ {P_1} = K \left[ {\begin{array}{*{20}{c}} {{\Sigma _1}}&0\\ 0&{{\Pi _1}} \end{array}} \right]{K ^{\rm T}}, H_1 = \begin{bmatrix} -I\\S \end{bmatrix}, $ $ H_1^ \bot = \left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right] $, 式(35)可改写为
$$ \begin{equation*} {P_1} + He({H_1}{X_1}) < 0 \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} {R_1} = \, & \left[ {\begin{array}{*{20}{c}} I&0&0&0&0&0&0 \end{array}} \right]\\ {R_2} = \, &\left[ {\begin{array}{*{20}{c}} 0&I&0&0&0&0&0 \end{array}} \right]\\ V_a = \, &\begin{bmatrix} V_1&0&V_2&0&V_3&0&V_4 \end{bmatrix}\\ V_b = \, &\begin{bmatrix} 0&V_5&0&V_6&0&V_7&0 \end{bmatrix} \end{aligned} \end{equation*} $$ 代入可得式(33).此外, 若式(33)成立, 易知$ X $可逆, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
定理 7. 给定标量$ {\beta _2} > 0 $, $ {\bar \omega _{21}}, {\bar \omega _{22}} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {\tilde P_1} $, $ {\tilde P_2} $及$ {\tilde Q_1}>0 $, $ {\tilde Q_2}>0 $, 矩阵$ {X} $, $ {Y} $, $ {V_{i}} $, $ i = 1, \cdots , 7 $, 使不等式(36)成立, 则系统(32) $满足性能指标(12).此外, 若式(36)成立, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Sigma _{11}}}&{{\Sigma _{12}}}&{{\Phi _{13}}}&{{\Sigma _{14}}}&{{\Sigma _{15}}}&{{\Phi _{16}}}&{{\Phi _{17}}}\\ *&{{\Sigma _{22}}}&{{\Phi _{23}}}&{{\Phi _{24}}}&{{\Sigma _{25}}}&{{\Phi _{26}}}&{{\Phi _{27}}}\\ *&*&{{\Phi _{33}}}&{{\Phi_{34}}}&{{\Sigma _{35}}}&{{\Phi _{36}}}&{{\Phi _{37}}}\\ *&*&*&{{\Sigma _{44}}}&{{\Sigma _{45}}}&{{\Phi _{46}}}&{{\Phi _{47}}}\\ *&*&*&*&{{\Sigma _{55}}}&{{\Sigma _{56}}}&{{\Sigma _{57}}}\\ *&*&*&*&*&{{\Sigma _{66}}}&{{\Phi _{67}}}\\ *&*&*&*&*&*&{{\Sigma _{77}}} \end{array}} \right] < 0 \end{equation} $$ (36) 其中
$$ \begin{equation*} \begin{aligned} {\Sigma _{11}} = \, & {\tilde P_1} + {\tilde P_2}- {X} - X^{\rm T} , {\Sigma _{12}} = {\tilde Q_1}\\ {\Sigma _{14}} = \, &0 \\ {\Sigma _{15}} = \, & {({A_1}{X} +{B_{d1}}{V_1}+{B_{u1}}{Y})^{\rm T}}+{\tilde {Q_2}}\\ {\Sigma _{22}} = \, & -{\tilde P_1} -2\cos {\bar \omega _{21}}{\tilde Q_1}- {X} - X^{\rm T} \\ {\Sigma _{25}} = \, & {({A_2}{X} + {B_{d2}}{V_5} +{B_{u2}}{Y})^{\rm T}}\\ {\Sigma _{35}} = \, & -{V_{3}} + ({B_{d1}}{V_2})^{\rm T}\\ {\Sigma _{44}} = \, & I- {V_{6}} - {V_{6}}^{\rm T}\\ {\Sigma _{45}} = \, &{({B_{d2}}{V_{6}})^{\rm T}} \\ {\Sigma _{55}} = \, &-\tilde{P_2}-2\cos\bar{\omega}_{22}\tilde{Q}_2+B_{d1}V_3+(B_{d1}V_3)^{\rm T} \\ {\Sigma _{56}} = \, & {B_{d2}}{V_{7}}, {\Sigma _{57}} = {B_{d1}}{V_{4}}, {\Sigma _{66}} = - \beta _2^2I, {\Sigma _{77}} = - \beta _2^2I \end{aligned} \end{equation*} $$ 证明. 参考定理6证明过程.
通过求解以下优化问题获得控制器参数$ {\hat C_c} $:
$$ \begin{equation*} \begin{aligned} &\min a{\beta _1} + b{\beta _2}\\ &{\rm s.t.}\;\;(33), (36) \end{aligned} \end{equation*} $$ (37) 给定实参数$ a $, $ b $, 若上述优化问题可解, 则控制器参数$ {\hat C_c} = YX^{-1} $.
步骤2. 在步骤1的基础上($ {\hat C_c} $已知), 给定实参数$ {a_1} $, $ {a_2} $, $ {b_1} $, $ {b_2} $, 求解如下的优化问题:
$$ \begin{equation*} \begin{aligned} & \min {a_2}{\gamma _2} + {b_1}{\beta _1} + {b_2}{\beta _2} - {a_1}{\gamma _1}\\ &{\rm s.t.}\;(18), (19), (20), (25), (28), (29), (30) \end{aligned} \end{equation*} $$ 若上述优化问题可解, 则可得滤波器参数$ \hat A_k = G_3^{-1}\tilde A_k, \hat B_k = G_3^{-1}\tilde B_k, k = 1, 2, {\hat C_0} = {\hat C_0} $.
注5. 与一维系统相比, 二维系统的稳定性条件和性能条件复杂, 其故障检测滤波器/控制器的设计过程更加困难.求解有限频$ {H_ - } $指标时, 一维系统可通过Finsler定理等避免出现非凸问题, 而二维系统由于其广义KYP引理的特殊形式, 需要通过构造切平面方法来解决设计过程中出现的非凸问题.二维系统的状态反馈控制器设计难度也更大, 需利用广义KYP引理的对偶形式进行构造性证明.
4.2 残差评价函数及阈值
受参考文献[29]启发, 选择如下残差评价函数及阈值:
$$ \begin{equation} \begin{aligned} {J_r}(i, j)& = \sqrt{\frac{{\sum\limits_{p = 0}^s {\sum\limits_{q = 0}^t {{r^{\rm T}}}(i-p, j-q)r(i-p, j-q)}}}{{(s+1)(t+1)}}}\\ {J_{th}}& = \mathop{\sup}\limits_{f = 0, d \ne 0} {J_r}(i, j) \end{aligned} \end{equation} $$ (38) 其中, $ {J_r}(i, j) $和$ {J_{th}} $分别表示残差函数及阈值.阈值$ {J_{th}} $可借鉴文献[30]中的算法求出.根据如下的逻辑关系检测系统是否发生了故障:
$$ \begin{array}{l} J\left( {i,j} \right) > {J_{th}} \Rightarrow 系统存在故障 \Rightarrow 报警\\ J\left( {i,j} \right) < {J_{th}} \Rightarrow 系统无故障 \Rightarrow 不报警 \end{array} $$ 注6. 对于二维系统而言, 残差评价函数需要从水平和垂直两个方向定义以反映二维特性.本文选择水平方向$ i-s $到$ i $, 垂直方向$ j-t $$到$ j $的矩形区域内残差的平均值作为评价函数.而对于一维系统, 残差评价函数只需要在一个方向上定义, 其评估窗口通常为$ k_0 $到$ k_0+n $的时间范围.
5. 仿真例子
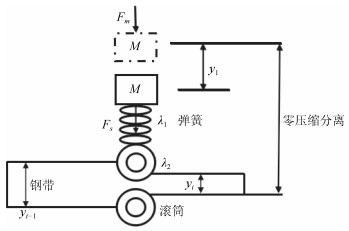
该轧制过程可用如下等式描述:
$$ \begin{equation*} \begin{aligned} \pmb y_{i}(t) = {\frac{\lambda}{\lambda +Mp^2}}\left\{\left(1+\frac{Mp^2}{\lambda_1}\right)\pmb y_{i-1}(t)-{\frac{1}{\lambda_2}}\pmb F_m\right\} \end{aligned} \end{equation*} $$ 其中, $ p $表示微分算子$ {\rm d}/{\rm d}t $, $ \pmb y_i(t) $是第$ i $个实际压辊间隙厚度, $ \pmb F_m $是由电动机产生的力, $ M $是压辊间隙调节机构的总质量, $ \lambda_1 $表示调节机构弹簧, $ \lambda_2 $表示带钢的硬度, $ \lambda = \lambda_1\lambda_2/(\lambda_1+\lambda_2) $是带钢和压辊机构的复合刚度.通过向后差分并用$ T_1 $表示采样周期, 则上式可以用离散时间形式表示:
$$ \begin{equation*} \begin{aligned} \pmb y_i(t+T_1) = \, & c_1\pmb y_i(t)+c_2\pmb y_i(t-T_1)+c_3\pmb y_{i-1}(t+T_1)+\\ & c_4\pmb y_{i-1}(t)+c_5\pmb y_{i-1}(t-T_1)+b \pmb u_{i}(t)\end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} c_1 = \, &\frac{2M}{\lambda {T_1}^2+M}, \; c_2 = \frac{-M}{\lambda {T_1}^2+M}\\ c_3 = \, & \frac{\lambda}{\lambda {T_1}^2+M}\left({T_1}^2+\frac{M}{\lambda }\right)\\ c_4 = \, & -\frac{2\lambda M}{\lambda_1(\lambda{T_1}^2+M)}, \; c_5 = \frac{\lambda M}{\lambda_1(\lambda{T_1}^2+M)}\\ b = \, & -\frac{\lambda {T_1}^2}{\lambda_2(\lambda{T_1}^2+M)}\\ \pmb x(i, j): = \, &[\pmb y_{i-1}^{\rm T}((j+1)T_1)\quad \pmb y_{i-1}^{\rm T}(jT_1)\quad \pmb y_{i}^{\rm T}(jT_1)\\ &\pmb y_{i}^{\rm T}((j-1)T_1)\quad \pmb y_{i-1}^{\rm T}((j-1)T_1)]^{\rm T}\\ \pmb u(i, j): = \, &\pmb F_m, \; \pmb y(i, j): = \pmb y_i(jT_1) \end{aligned} \end{equation*} $$ 上述等式可转化为FM模型:
$$ \begin{equation*} \begin{split} {\pmb x}({ i} + 1, { j} + 1) = \, &A_1{\pmb x}({ i}, { j} + 1) + A_2{\pmb x}({ i} + 1, { j})+\\ & B_{{ d}1}{\pmb d}({ i}, { j} + 1) + B_{{ d}2}{\pmb d}({ i} + 1, { j})+\\ & B_{{ u}1}{\pmb u}({ i}, j + 1) + B_{u2}{\pmb u}({ i}+1, j) +\\ & B_{{ f}1}{\pmb f}({ i}, j + 1) + B_{{ f}2}{\pmb f}({ i} + 1, { j})\\ \pmb y({ i}, { j}) = \, & C{\pmb x}({ i}, { j}) + D_{ d}{\pmb d}({ i}, { j}) + D_{ f}{\pmb f}({ i}, { j})\\ \pmb z({ i}, { j}) = \, & E{\pmb x}({ i}, { j}) + F_{ u} {\pmb u}({ i}, { j}) \end{split} \end{equation*} $$ 其中
$$ \begin{align*} {A_1}& = \left[ {\begin{array}{*{20}{c}} {c_3}&{c_4}&{c_1}&{c_2}&{c_5}\\ 0&0&1&0&0\\0&0&0&0&0\\0&0&0&0&0\\0&0&0&0&0 \end{array}} \right]\\{A_2}& = \left[ {\begin{array}{*{20}{c}} 0&0&0&0&0\\0&0&0&0&0\\{c_3}&{c_4}&{c_1}&{c_2}&{c_5}\\0&0&1&0&0\\0&1&0&0&0 \end{array}} \right]\\ {B_{d1}}& = \left[ {\begin{array}{*{20}{c}} 0.0605\\0.3993\\0.5269\\0.4168\\0.6569 \end{array}} \right], {B_{d2}} = \left[ {\begin{array}{*{20}{c}} 0.6280\\0.2920\\0.4317\\0.0155\\0.9841 \end{array}} \right] \end{align*} $$ $$ \begin{align*} {B_{u1}}& = \left[ {\begin{array}{*{20}{c}} b\\0\\0\\0\\0 \end{array}} \right], {B_{u2}} = \left[ {\begin{array}{*{20}{c}} 0\\0\\b\\0\\0 \end{array}} \right]\\ B_{f1}& = \begin{bmatrix} -1.0414&0&0&0&0 \end{bmatrix}^{\rm T}\\B_{f2}& = \begin{bmatrix} 0&0&-1.0414&0&0 \end{bmatrix}^{\rm T}\\ C& = \begin{bmatrix} 0&0&0&0&0 \end{bmatrix}\\ E& = \left[ {\begin{array}{*{20}{c}} 0&0&{1}&0&0 \end{array}} \right]\\ F_u& = 0.1672, D_f = 1.2, D_d = 0.5 \end{align*} $$ 令$ \lambda_1 = \lambda_2 = 1\, 800, T_1 = 0.8, M = 100 $, 假设上述系统中发生了卡死型传感器故障.利用本文所提出的方法设计故障检测滤波器/控制器, 同时保证一定的故障检测性能和控制性能.给定加权值$ {a_1} = 0.1 $, $ {a_2} = 0.4 $, $ {b_1} = 0.4 $, $ {b_2} = 0.1 $, 由于故障发生在低频段, 取频率约束$ {\bar \omega _{k1}} = {\bar \omega _{k2}} = \pi /12, k = 1, 2 $, 其余参数取为$ T = \left[ {\begin{array}{*{20}{c}} 0.8147&0.9058&0.1270&0.9134&0.6324 \end{array}} \right]^{\rm T} $, $ \alpha = 1.6537 $.根据上节所提出的算法, 可得如下故障检测滤波器/控制器参数:
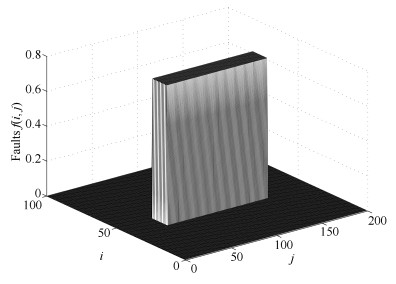
$$ \begin{equation*} \begin{aligned} {\hat A_1} = \, & \left[ {\begin{array}{*{20}{c}} -0.0673&-0.0120&0.0238&-0.0189&0.0103\\ -0.0064&-0.1977&0.0372&0.0114&0.0109\\ 0.0065&0.0130&-0.1643&0.0184&0.0082\\ -0.0037&0.0061&0.0135&-0.1931&0.0030\\ -0.0196&0.0166&0.0128&0.0091&-0.1854\\ \end{array}} \right]\\ {\hat A_2} = \, & \left[ {\begin{array}{*{20}{c}} -0.1618&0&0.0071&-0.0030&0.0026\\ 0.0097&-0.1998&0.0160&0.0041&0.0088\\ 0.0601&0.0040&-0.1529 & 0 & 0.0137\\ 0.0099&0.0047&0.0384&-0.2012&0.0050\\ -0.0148&0.0316&0.0103&0.0077&-0.1892 \end{array}} \right]\\ {\hat B_1} = \, & \left[ {\begin{array}{*{20}{c}} 0.3024\\ -0.0514\\ 0.0357\\ -0.0827\\ -0.0437 \end{array}} \right], {\hat B_2} = \left[ {\begin{array}{*{20}{c}} -0.1311\\ 0.0634\\ 0.2529\\ 0.0884\\ -0.0510 \end{array}} \right] \end{aligned} \end{equation*} $$ $$ \begin{equation*} \begin{aligned} {\hat C_c} = \, & \left[ {\begin{array}{*{20}{c}} 556.2519&-81.8249&86.8303&-88.8581&44.4291 \end{array}} \right]\\ {\hat C_0} = \, &\left[ {\begin{array}{*{20}{c}} 1.0215&1.1350&0.1381&1.1477&0.7935 \end{array}} \right] \end{aligned} \end{equation*} $$ 为了验证该故障检测滤波器/控制器的有效性, 给出仿真结果(图 1~4).在仿真中, 考虑卡死型故障
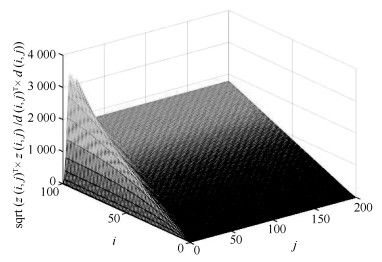
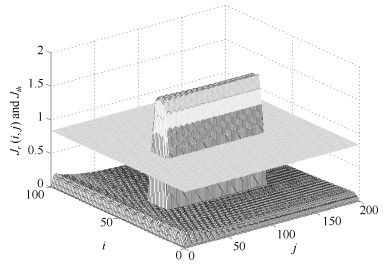 图 4 三维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 4 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in three-dimensional space
图 4 三维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 4 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in three-dimensional space$$ \begin{equation*} \pmb f(i, j) = \begin{cases} 0.8, &40 \le i \le 50, 40 \le j \le 150\\ 0, & \mbox{否则} \end{cases} \end{equation*} $$ 以及干扰
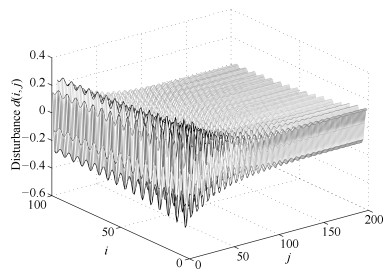
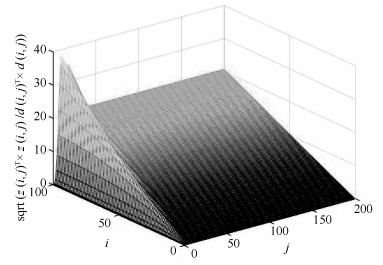
$$ \begin{equation*} \pmb d(i, j) = 0.15{\sin}(i){\rm e}^{-0.02i}+0.3{\cos}(j){\rm e}^{-0.03j} \end{equation*} $$ 系统初始状态设为$ {{\pmb x}_i}(k, 1) = 0 $, $ {\hat {\pmb x}_i}(k, 1) = 0 $, $ {\pmb x_i}(1, k) = 0 $, $ {\hat {\pmb x}_i}(1, k) = 0 $.采用参考文献[30]中的算法, 可得阈值$ {J_{th}} = 0.8251 $. 图 2表示系统的故障, 图 3表示系统干扰, 图 4和图 5分别给出了三维空间和二维空间的故障检测效果.从图 5可以看出, 当$ i = 15, 23, 35 $时, 残差评价函数的值位于阈值的下方, 表明系统没有发生故障; 当$ i = 44 $, $ 40 \le j\le150 $时, 残差评价函数的值位于阈值的上方, 表明此时系统发生了故障, 这与预设的故障一致, 因此该设计可以有效地检测出故障发生.
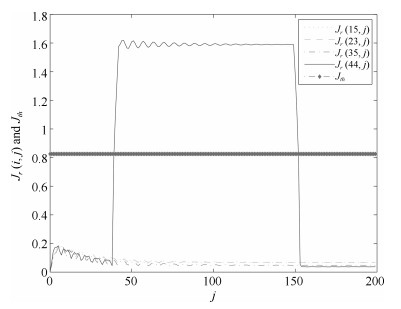 图 5 二维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 5 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in two-dimensional space
图 5 二维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 5 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in two-dimensional space接下来与传统的分步设计方法[15]进行比较, 仍采用上文中的轧制模型中的数据, 先设计控制器, 再设计故障检测滤波器.在相同条件下进行仿真研究, 仿真结果如图 6~8所示. 图 6为故障到残差传递函数的奇异值比较, 可以看出集成设计方法的故障灵敏性更高(奇异值更大). 图 7和图 8为两种方法的控制性能(即扰动抑制性能)的比较, 可以看出当故障发生时, 本文所提出的集成设计方法具有更好的扰动抑制能力.
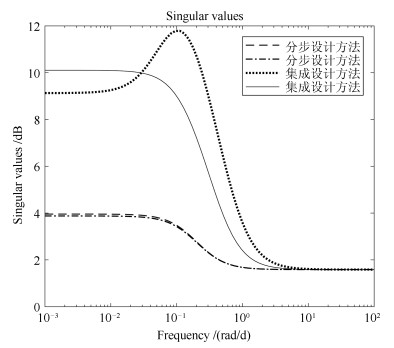 图 6 故障到残差传递函数${G_{\tilde yf}}({\omega _1}, {\omega _2})$的奇异值比较Fig. 6 Singular value comparison of transfer functions ${G_{\tilde yf}}({\omega _1}, {\omega _2})$ from fault to residual signal
图 6 故障到残差传递函数${G_{\tilde yf}}({\omega _1}, {\omega _2})$的奇异值比较Fig. 6 Singular value comparison of transfer functions ${G_{\tilde yf}}({\omega _1}, {\omega _2})$ from fault to residual signal6. 结论
本文研究了FM模型的同时故障检测与控制问题.借助于二维广义KYP引理, 直接处理系统需要满足的有限频性能指标, 可避免频率加权方法的复杂性.所设计的故障检测滤波器/控制器, 在检测故障发生的同时, 还可以满足给定的控制性能指标.利用构造切平面方法以及两步法来解决设计过程中出现的非凸问题.仿真例子验证了方法的有效性.
-
[1] Szabo N. Smart contracts[Online], avaliable: http://www.fon.hum.uva.nl/rob/Courses/InformationInSpeech/CDROM/Literature/LOTwinterschool2006/szabo.best.vwh.net/smart.contracts.html, November 5, 2018 [2] Nakamoto S. Bitcoin: a peer-to-peer electronic cash system[Online], avaliable: https://bitcoin.org/bitcoin.pdf, January, 2009 [3] Stark J. Making sense of blockchain smart contracts[Online], available: https://www.coindesk.com/making-sense-smart-contracts/, November 5, 2018 [4] Bartoletti M, Pompianu L. An empirical analysis of smart contracts:platforms, applications, and design patterns. In:Proceedings of the International Conference on Financial Cryptography and Data Security. Springer, Cham, 2017. 494-509 [5] Wood G. Ethereum: A secure decentralized generalized transaction ledger (EIP-150 revision)[Online], avaliable: http://gavwood.com/paper.pdf, November 5, 2018 [6] Wikipedia: The DAO (organization)[Online], available: https://en.wikipedia.org/wiki/The_DAO_(organization), November 5, 2018 [7] 袁勇, 王飞跃.区块链技术发展现状与展望.自动化学报, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtmlYuan Yong, Wang Fei-Yue. Blockchain:the state of the art and future trends. Acta Automatica Sinica, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtml [8] Hyperledger fabric website[Online], available: https://www.hyperledger.org/projects/fabric, November 5, 2018 [9] Meiklejohn S, Pomarole M, Jordan G, Levchenko K, McCoy D, Voelker G M, et al. A fistful of bitcoins: characterizing payments among men with no names. In: Proceedings of the 2013 Conference on Internet Measurement Conference. New York, USA: ACM, 2013. 127-140 [10] Ron D, Shamir A. Quantitative analysis of the full bitcoin transaction graph. In: Proceedings of the 2013 International Conference on Financial Cryptography and Data Security. Springer, Berlin, Heidelberg, 2013. 6-24 [11] Kosba A, Miller A, Shi E, Wen Z, Papamanthou C. Hawk: the blockchain model of cryptography and privacy-preserving smart contracts. In: Proceedings of the 37th Symposium on Security and Privacy. New York, USA: IEEE, 2016. 839-858 [12] Zhang F, Cecchetti E, Croman K, Juels A, Shi Elaine. Town crier: an authenticated data feed for smart contracts. In: Proceedings of the 2016 ACM SIGSAC Conference on Computer and Communications Security. New York, USA: ACM, 2016. 270-282 [13] Ye P J, Wang S, Wang F Y. A general cognitive architecture for agent-based modeling in artificial societies. IEEE Transactions on Computational Social Systems, 2018, 5(1):176-185 doi: 10.1109/TCSS.2017.2777602 [14] Atzei N, Bartoletti M, Cimoli T. A survey of attacks on ethereum smart contracts. In: Proceedings of the 2017 International Conference on Principles of Security and Trust. Springer, Berlin, Heidelberg, 2017. 164-186 [15] Luu L, Chu D H, Olickel H, Saxena P, Hobor A. Making smart contracts smarter. In: Proceedings of the 2016 ACM SIGSAC Conference on Computer and Communications Security. New York, USA: ACM, 2016. 254-269 [16] Chen T, Li X Q, Luo X P, Zhang X S. Under-optimized smart contracts devour your money. In: Proceedings of the 4th International Conference on Software Analysis, Evolution and Reengineerin. New York, USA: IEEE, 2017. 442-446 [17] Juels A, Kosba A, Shi E. The ring of gyges: investigating the future of criminal smart contracts. In: Proceedings of the 2016 ACM SIGSAC Conference on Computer and Communications Security. New York, USA: ACM, 2016. 283-295 [18] Christin N. Traveling the silk road: a measurement analysis of a large anonymous online marketplace. In: Proceedings of the 22nd International Conference on World Wide Web. New York, USA: ACM, 2013. 213-224 [19] Erdman A G, Sandor G N. Mechanical Design (3rd ed): Analysis and Synthesis (Vol.1). Englewood Cliffs: Prentice-Hall, 1997 [20] 曾帅, 袁勇, 倪晓春, 王飞跃.面向比特币的区块链扩容: 关键技术、制约因素与衍生问题.自动化学报, DOI: 10.16383/j.aas.c180100Zeng Shuai, Yuan Yong, Ni Xiao-Chun, Wang Fei-Yue. Scaling blockchain towards bitcoin: key technologies, constraints and related issues. Acta Automatica Sinica, DOI: 10.16383/j.aas.c180100 [21] Dickerson T, Gazzillo P, Herlihy M, Koskinen E. Adding concurrency to smart contracts. In: Proceedings of the 2017 ACM Symposium on Principles of Distributed Computing. New York, USA: ACM, 2017. 303-312 [22] 胡凯, 白晓敏, 高灵超, 董爱强.智能合约的形式化验证方法.信息安全研究, 2016, 2(12):1080-1089 http://d.old.wanfangdata.com.cn/Periodical/xxaqyj201612003Hu Kai, Bai Xiao-Min, Gao Ling-Chao, Dong Ai-Qiang. Formal verification method of smart contract. Journal of Information Security Research, 2016, 2(12):1080-1089 http://d.old.wanfangdata.com.cn/Periodical/xxaqyj201612003 [23] Mythril website[Online], available: https://github.com/b-mueller/mythril/, November 5, 2018 [24] Bhargavan K, Delignat-Lavaud A, Fournet C, Gollamudi A, Gonthier G, Kobeissi N, et al. Short paper: formal verification of smart contracts. In: Proceedings of the 2016 ACM Workshop on Programming Languages and 23 Analysis for Security. New York, USA: ACM, 2016. 91-96 [25] Kalra S, Goel S, Dhawan M, Sharma S. Zeus: analyzing safety of smart contracts[Online], available: http://pages.cpsc.ucalgary.ca/joel.reardon/blockchain/readings/ndss2018_09-1_Kalra_paper.pdf, November 5, 2018 [26] Manticore website[Online], available: https://github.com/trailofbits/manticore, November 5, 2018 [27] Tsankov P, Dan A, Cohen D D, et al. Securify: practical security analysis of smart contracts. In: Proceedings of the 25th ACM Conference on Computer and Communications Security. New York, USA: ACM, 2018. 67-82 [28] Solgraph website[Online], available: https://github.com/raineorshine/solgraph, November 5, 2018 [29] 乔海曙, 谢姗珊.区块链金融理论研究的最新进展.金融理论与实践, 2017, (3):75-79 doi: 10.3969/j.issn.1003-4625.2017.03.014Qiao Hai-Shu, Xie Shan-Shan. The latest development of theoretical research on blockchain finance. Financial Theory and Practice, 2017, (3):75-79 doi: 10.3969/j.issn.1003-4625.2017.03.014 [30] Peters G W, Panayi E. Understanding Modern Banking Ledgers Through Blockchain Technologies: Future of Transaction Processing and Smart Contracts on the Internet of Money. Berlin: Springer International Publishing, 2016. 5-10 [31] Corda website[Online], available: https://docs.corda.net/, November 5, 2018 [32] Gatteschi V, Lamberti F, Demartini C, Pranteda C, Santamaria V. Blockchain and smart contracts for insurance:is the technology mature enough. Future Internet, 2018, 10(2):20 [33] Bertani T, Butkute K, Canessa F. Smart flight insurance-insureth[Online], available: https://mkvd.s3.amazonaws.com/apps/InsurEth.pdf, November 5, 2018 [34] ECoinmerce: decentralized marketplace[Online], available: https://www.ecoinmerce.io/, November 5, 2018 [35] Slock.it: enabling the economy of things[Online], available: https://slock.it/, November 5, 2018 [36] Beck R, Avital M, Rossi M, Thatcher J B. Blockchain technology in business and information systems research. Business & Information Systems Engineering, 2017, 59(6):381-384 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=WK_MED201804280769 [37] Weber I, Gramoli V, Ponomarev A, Staples M, Holz R, Tran A B, et al. On availability for blockchain-based systems. In: Proceedings of the International Symposium on Reliable Distributed Systems. New York, USA: IEEE, 2017. 64-73 [38] Wang S, Ni X C, Yuan Y, Wang X, Ouyang L W, Wang F Y. A preliminary research of prediction markets based on blockchain powered smart contracts. In: Proceedings of the 2018 International Conference on Blockchain (Blockchain-2018. New York, USA: IEEE, 2018. 1287-1293 [39] McCorry P, Shahandashti S F, Hao F. A smart contract for boardroom voting with maximum voter privacy. In: Proceedings of the 2017 International Conference on Financial Cryptography and Data Security. Springer, Cham, 2017. 357-375 [40] Rosa J L, Gibovic D, Torres-Padrosa V, Maicher L, Miralles F, Fakdi A, et al. On intellectual property in online open innovation for SME by means of blockchain and smart contracts. In: Proceedings of the 3rd Annual World Open Innovation Conference. Barcelona, Spain, 2016 [41] IP360 website[Online], available: https://www.ip360.net.cn/index, November 5, 2018 [42] Xia Q, Sifah E B, Asamoah K O, Gao J B, Du X J, Guizani M. MeDShare:trust-less medical data sharing among cloud service providers via blockchain. IEEE Access, 2017, 5(99):14757-14767 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ021078146/ [43] Azaria A, Ekblaw A, Vieira T, Lippman A. MedRec: using blockchain for medical data access and permission management. In: Proceedings of the 2nd International Conference on Open and Big Data. New York, USA: IEEE, 2016. 25-30 [44] Kuo T T, Ohno-Machado L. ModelChain: decentralized privacy-preserving healthcare predictive modeling framework on private blockchain networks. Computers and Society, arXiv: 1802.01746 [45] Mediledger website[Online], available: https://www.mediledger.com/, November 5, 2018 [46] BlockMedx website[Online], available: https://blockmedx.com/en/, November 5, 2018 [47] Dorri A, Kanhere S S, Jurdak R, Gauravaram P. Blockchain for IoT security and privacy: the case study of a smart home. In: Proceedings of the 2017 International Conference on Pervasive Computing and Communications Workshops. New York, USA: IEEE, 2017. 618-623 [48] Dorri A, Kanhere S S, Jurdak R. Towards an optimized blockchain for IoT. In: Proceedings of the 2017 International Conference on Internet-Of-Things Design and Implementation, Pittsburgh. New York, USA: IEEE, 2017. 173-178 [49] Zhang Y, Wen J T. An IoT electric business model based on the protocol of bitcoin. In: Proceedings of 18th International Conference on Intelligence in Next Generation Networks. New York, USA: IEEE, 2015. 184-191 [50] Zhang Y Y, Kasahara S, Shen Y L, Jiang X H, Wan J X. Smart contract-based access control for the Internet of Things. Cryptography and Security, arXiv: 1802.04410 [51] IoTeX website[Online], available: https://iotex.io/, November 5, 2018 [52] Byrne R O. How blockchain can transform the supply chain[Online], available: https://www.logisticsbureau.com/how-blockchain-can-transform-the-supply-chain/, November 5, 2018 [53] Bocek T, Rodrigues B B, Strasser T, Stiller B. Blockchains everywhere——a use-case of blockchains in the pharma supply-chain. In: Proceedings of the 2017 Symposium on Integrated Network and Service Management. New York, USA: IEEE, 2017. 772-777 [54] Stark J. Making sense of ethereum's layer2 scaling solutions: state channels, plasma, and truebit[Online], available: https://medium.com/l4-media/making-sense-of-ethereums-layer-2-scaling-solutions-state-channels-plasma-and-truebit-22cb40dcc2f4, November 5, 2018 [55] Taxa Website[Online], available: https://taxa.network/, November 5, 2018 [56] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1):1-8 doi: 10.3969/j.issn.1003-8930.2015.01.001Wang Fei-Yue. Software-defined systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1):1-8 doi: 10.3969/j.issn.1003-8930.2015.01.001 [57] 王飞跃, 王晓, 袁勇, 王涛, 林懿伦.社会计算与计算社会:智慧社会的基础与必然.科学通报, 2015, 60(5-6):460-469 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx200404002Wang Fei-Yue, Wang Xiao, Yuan Yong, Wang Tao, Lin Yi-Lun. Social computing and computational societies:the fouyndation and consequence of smart societies. China Science Bulletin, 2015, 60(5-6):460-469 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx200404002 [58] 王飞跃.人工社会、计算实验、平行系统——关于复杂社会经济系统计算研究的讨论.复杂系统与复杂性科学, 2004, 1(4):25-35 doi: 10.3969/j.issn.1672-3813.2004.04.002Wang Fei-Yue. Artificial societies, computational experiments, and parallel systems:a discussion on computational theory of complex social-economic systems. Complex System and Complexity Science, 2004, 1(4):25-35 doi: 10.3969/j.issn.1672-3813.2004.04.002 [59] Wang F Y, Yuan Y, Wang X, Qin R. Societies 5.0: a new paradigm for computational social systems research. IEEE Transactions on Computational Social Systems, 2018, 5(1): 2-8 [60] Zhang J J, Wang F Y, Wang Q, Hao D, Yang X. Parallel dispatch:a new paradigm of electrical power system dispatch. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1):311-319 doi: 10.1109/JAS.2017.7510778 [61] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃.平行学习——机器学习的一个新型理论框架.自动化学报, 2017, 43(1):1-8 doi: 10.3969/j.issn.1003-8930.2017.01.001Li Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning——a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1):1-8 doi: 10.3969/j.issn.1003-8930.2017.01.001 [62] 袁勇, 王飞跃.平行区块链:概念、方法与内涵辨析.自动化学报, 2017, 43(10):1703-1712 http://d.old.wanfangdata.com.cn/Periodical/zdhxb201710003Yuan Yong, Wang Fei-Yue. Parallel blockchain:concept, methods and issues. Acta Automatica Sinica, 2017, 43(10):1703-1712 http://d.old.wanfangdata.com.cn/Periodical/zdhxb201710003 期刊类型引用(1)
1. 崔鹏浩,李成,蒋忠中. 考虑零件库存的两机器装配线性能评估与库存控制. 计算机集成制造系统. 2024(01): 289-299 .  百度学术
百度学术其他类型引用(4)
-

 下载:
下载:
 下载:
下载:


计量
- 文章访问数: 5718
- HTML全文浏览量: 2437
- PDF下载量: 2471
- 被引次数: 5
