

Exponential Synchronization of Discrete Uncertain Spatiotemporal Networks With Topology Switching Characteristics
-
摘要: 研究了具有拓扑切换特性的离散型不确定时空网络的指数同步问题. 基于稳定性理论, 构造了具有指数形式的Lyapunov函数, 并设计了同步控制器的结构方程, 进而获得了时空网络的同步条件. 同时, 我们设计了未知参数的识别律, 有效地识别了网络中的未知参数. 最后, 选取实际的激光相位共轭波空间扩展系统作为网络节点进行仿真模拟, 验证了同步方案的可行性与控制器的有效性. 通过构造具有指数形式的Lyapunov函数, 能够有效地调节网络的同步速率. 并且获得的同步条件中不包含网络的耦合矩阵项, 消除了拓扑切换特性对同步过程的影响, 使得网络同步性能更加稳定.Abstract: The exponential synchronization problem of discrete uncertain spatiotemporal networks with topology switching characteristics is researched. Based on the stability theory, the Lyapunov function with exponential form is constructed and the structural equation of the synchronous controller is designed, and then the synchronization condition of the spatiotemporal network is obtained. Meanwhile, the unknown parameters of the network are identifled efiectively by designing the identiflcation law of the unknown parameters. Finally, we use phase-conjugate wave spatial expanded system as the nodes of the network to simulate, and the feasibility of the synchronization scheme and the efiectiveness of the controller is verifled. By constructing the Lyapunov function with exponential form, the synchronization rate of the network can be adjusted efiectively. In addition, the synchronization condition does not contain the coupling matrix term of the network, which eliminates the influence of the topology switching characteristics on the synchronization process, and makes the network synchronization performance more stable.
-
Key words:
- Topology switching /
- discrete spatiotemporal networks /
- parameter identiflcation /
- exponential synchronization
1) 本文责任编委 张卫东 -
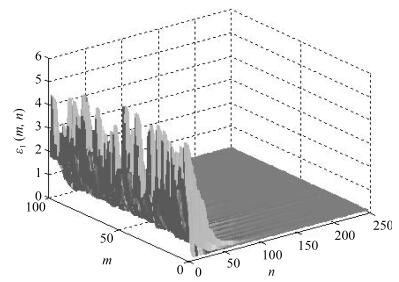
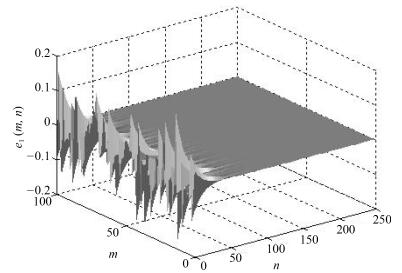
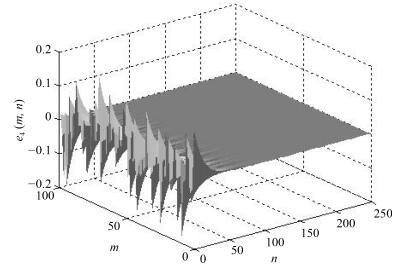
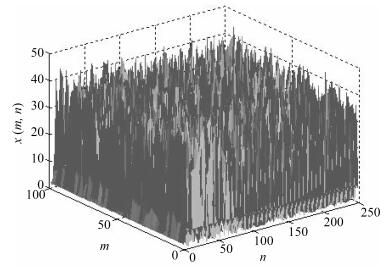
图 11 未知参数$\varepsilon_1(m, n)$随时空的演化
Fig. 11 Spatiotemporal evolution of unknown parameter $\varepsilon_1(m, n)$

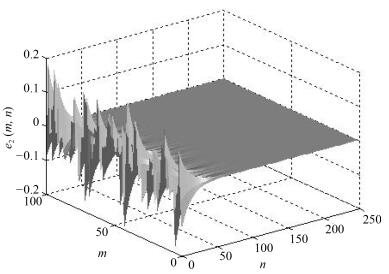
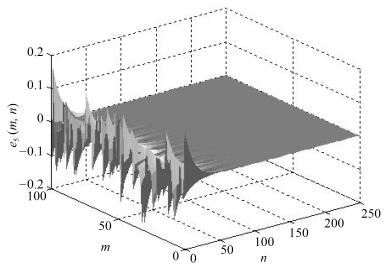
图 12 未知参数$\varepsilon_2(m, n)$随时空的演化
Fig. 12 Spatiotemporal evolution of unknown parameter $\varepsilon_2(m, n)$
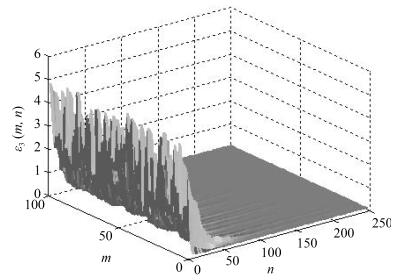
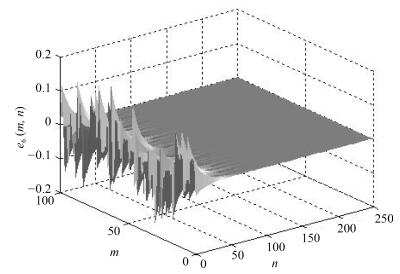
图 13 未知参数$\varepsilon_3\, (m, n)$随时空的演化
Fig. 13 Spatiotemporal evolution of unknown parameter $\varepsilon_3\, (m, n)$
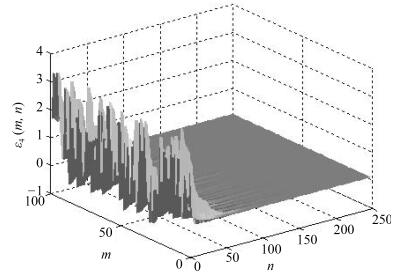
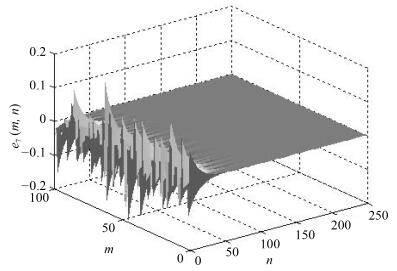
图 14 未知参数$\varepsilon_4(m, n)$随时空的演化
Fig. 14 Spatiotemporal evolution of unknown parameter $\varepsilon_4(m, n)$

图 15 未知参数$\varepsilon_5(m, n)$随时空的演化
Fig. 15 Spatiotemporal evolution of unknown parameter $\varepsilon_5(m, n)$
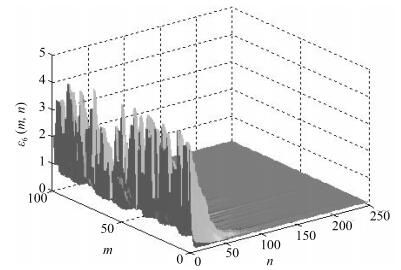
图 16 未知参数$\varepsilon_6(m, n)$随时空的演化
Fig. 16 Spatiotemporal evolution of unknown parameter $\varepsilon_6(m, n)$
-
[1] Xu X F, Zong G D, Hou L L. Passivity-based stabilization and passive synchronization of complex nonlinear networks. Neurocomputing, 2016, 175: 101-109 doi: 10.1016/j.neucom.2015.10.040 [2] Wang F, Yang Y Q, Hu M F, Xu X Y. Projective cluster synchronization of fractional-order coupled-delay complex network via adaptive pinning control. Physica A, 2015, 434: 134-143 doi: 10.1016/j.physa.2015.03.089 [3] Xu Y H, Zhou W N, Fang J A, Xie C R, Tong D B. Finite-time synchronization of the complex dynamical network with non-derivative and derivative coupling. Neurocomputing, 2016, 173: 1356-1361 doi: 10.1016/j.neucom.2015.09.008 [4] Wu H Q, Wang L F, Niu P F, Wang Y. Global projective synchronization in finite time of nonidentical fractionalorder neural networks based on sliding mode control strategy. Neurocomputing, 2017, 235: 264-273 doi: 10.1016/j.neucom.2017.01.022 [5] Anbuvithya R, Mathiyalagan K, Sakthivel R, PrakashP. Non-fragile synchronization of memristive BAM networks with random feedback gain fluctuations. Communications in Nonlinear Science and Numerical Simulation, 2015, 29: 427-440 doi: 10.1016/j.cnsns.2015.05.020 [6] Yang Y, Wang Y, Li T Z. Outer synchronization of fractional-order complex dynamical networks. Optik, 2016, 127: 7395-7407 doi: 10.1016/j.ijleo.2016.05.029 [7] Wang S G, Zheng S, Zhang B W, Cao H T. Modified function projective lag synchronization of uncertaincomplex networks with time-varying coupling strength. Optik, 2016, 127: 4716-4725 doi: 10.1016/j.ijleo.2016.01.085 [8] Chandrasekar A, Rakkiyappan R. Impulsive controller design for exponential synchronization of delayed stochastic memristor-based recurrent neural networks. Neurocomputing, 2016, 173: 1348-1355 doi: 10.1016/j.neucom.2015.08.088 [9] Srinivasan K, Chandrasekar V K, Gladwin P R, Murali K, Lakshmanan M. Different types of synchronization in coupled network based chaotic circuits. Communications in Nonlinear Science and Numerical Simulation, 2016, 39: 156-168 doi: 10.1016/j.cnsns.2016.03.002 [10] Zhai S D. Modulus synchronization in a network of nonlinear systems with antagonistic interactions and switching topologies. Communications in Nonlinear Science and Numerical Simulation, 2016, 33: 184-193 doi: 10.1016/j.cnsns.2015.09.010 [11] Wang X, Yang G H. Distributed H$_\infty$ consensus tracking control for multi-agent networks with switching directed topologies. Neurocomputing, 2016, 207: 693-699 doi: 10.1016/j.neucom.2016.05.052 [12] Fan J B, Wang Z X, Jiang G P. Quasi-synchronization of heterogeneous complex networks with switching sequentially disconnected topology. Neurocomputing, 2017, 237: 342-349 doi: 10.1016/j.neucom.2017.01.025 [13] Dai A D, Zhou W N, Xu Y H, Xiao C. Adaptive exponential synchronization in mean square for Markovian jumping neutral-type coupled neural networks with time-varying delays by pinning control. Neurocomputing, 2016, 173: 809-818 doi: 10.1016/j.neucom.2015.08.034 [14] Zhang Q J, Chen G R, Wan L. Exponential synchronization of discrete-time impulsive dynamical networks with time-varying delays and stochastic disturbances. Neurocomputing, 2018, 309: 62-69 doi: 10.1016/j.neucom.2018.04.070 [15] Sakthivel R, Sathishkumar M, Kaviarasan B, Marshal Anthoni S. Synchronization and state estimation for stochastic complex networks with uncertain inner coupling. Neurocomputing, 2017, 238: 44-45 doi: 10.1016/j.neucom.2017.01.035 [16] Cheng R R, Peng M S, Zuo J. Pinning synchronization of discrete dynamical networks with delay coupling. Physica A, 2016, 450: 444-453 doi: 10.1016/j.physa.2016.01.004 [17] Mohammadzadeh A, Ghaemi S. A modified sliding mode approach for synchronization of fractional-order chaotic/hype- rchaotic systems by using new self-structuring hierarchical type-2 fuzzy neural network. Neurocomputing, 2016, 191: 200-213 doi: 10.1016/j.neucom.2015.12.098 [18] Zhao L, Jia Y M. Neural network-based distributed adaptive attitude synchronization control of spacecraft formation under modified fast terminal sliding mode. Neurocomputing, 2016, 171: 230-241 doi: 10.1016/j.neucom.2015.06.063 [19] Yang L X, Jiang J, Liu X J. Synchronization of fractional-order colored dynamical networks via open-plus-closed-loop control. Physica A, 2016, 443: 200-211 doi: 10.1016/j.physa.2015.09.062 [20] Fan Y Q, Xing K Y, Wang Y H, Wang L Y. Projective synchronization adaptive control for different chaoticneural networks with mixed time delays. Optik, 2016, 127: 2551-2557 doi: 10.1016/j.ijleo.2015.11.227 [21] Li J M, He C, Zhang W Y, Chen M L. Adaptive synchronization of delayed reaction-diffusion neural networks with unknown non-identical time-varying coupling strengths. Neurocomputing, 2017, 219: 144-153 doi: 10.1016/j.neucom.2016.09.006 [22] Ahmed M A A, Liu Y R, Zhang W B, Alsaadi F E. Exponential synchronization via pinning adaptive control for complex networks of networks with time delays. Neurocomputing, 2017, 225: 198-204 doi: 10.1016/j.neucom.2016.11.022 [23] Xu Q, Zhuang S X, Liu S J, Xiao J. Decentralized adaptive coupling synchronization of fractional-order complex-vari- able dynamical networks. Neurocomputing, 2016, 186: 119-126 doi: 10.1016/j.neucom.2015.12.072 [24] Han X M, Wu H Q, Fang B L. Adaptive exponential synchronization of memristive neural networks with mixed time-varying delays. Neurocomputing, 2016, 201: 40-50 doi: 10.1016/j.neucom.2015.11.103 [25] Ahmed M A A, Liu Y R, Zhang W B, Alsaedi A, Hayat T. Exponential synchronization for a class of complex networks of networks with directed topology and time delay. Neurocomputing, 2017, 266: 274-283 doi: 10.1016/j.neucom.2017.05.039 [26] Dai H, Chen W S, Jia J P, Liu J Y, Zhang Z Q. Exponential synchronization of complex dynamical networks with time-varying inner coupling via event-triggered communication. Robotics and Autonomous Systems, 2017, 245: 124-132 [27] Beli M R, Stojkov P. Chaos in phase-conjugate resonators as a multimodal mapping. Optical and Quantum Electronics, 1990, 22: 157-165 doi: 10.1007/BF02189951 [28] Kaneko K. Spatial period-doubling in open flow. Physics Letters A, 1980, 111: 321-325 http://www.sciencedirect.com/science/article/pii/0375960185903597 -

 下载:
下载:



计量
- 文章访问数: 962
- HTML全文浏览量: 254
- PDF下载量: 646
- 被引次数: 0
