

-
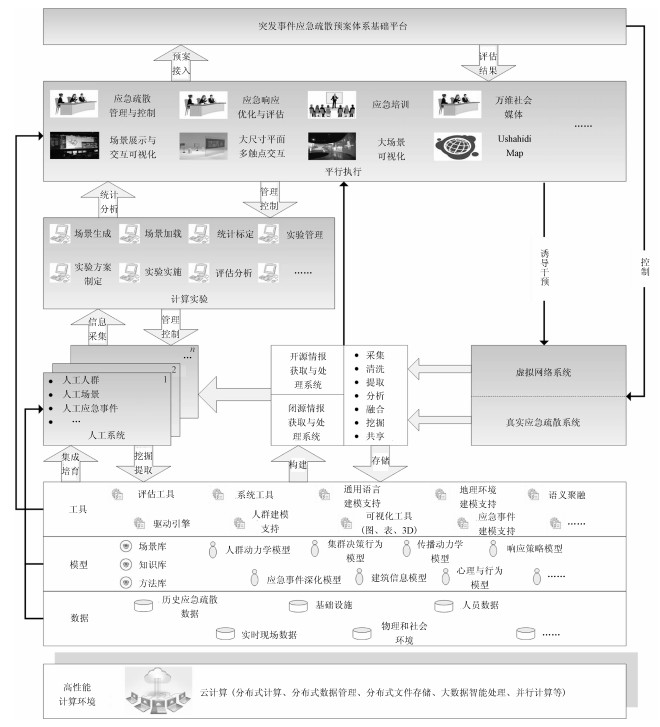
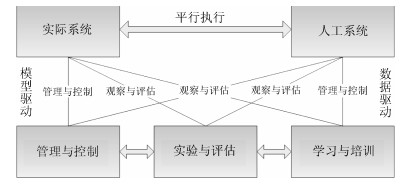
摘要: 突发事件通常具有难以预测、多成因关联、危害性大及演变复杂等特点,应急情况下如何安全高效疏散人员是应急管控领域的重要研究内容.本文将基于人工系统(Artificial systems,A)、计算实验(Computational experiments,C)、平行执行(Parallel excution,P)方法的平行系统理论引入到应急管控领域,提出平行应急疏散系统(Parallel emergency evacuation systems,PeES)基本概念,构建系统体系框架及集成平台,并介绍人工应急疏散系统、计算实验、平行执行等主要功能模块的基本功能及实现方法.通过PeES能实现虚实应急疏散系统的管理与控制、应急方案的实验与评估以及相关人员的学习与培训.最后,以轨道交通枢纽站火灾场景下的乘客应急疏散为典型应用对平行应急疏散系统进行初步验证.Abstract: Emergencies are usually characterized by unpredictable, multi-cause interconnection, great perniciousness, and complicated evolution. How to evacuate personnel safely and efficiently in case of an emergency is an important research content in the field of emergency management and control. This paper proposes the basic concept, framework and integrated platform of parallel emergency evacuation systems (PeES) by introducing the ACP (Artificial systems, Computational experiments, Parallel excution) method based parallel system theory to the field of emergency management and control. The basic functions and implementation methods of main functional modules, including artificial emergency evacuation systems, computational experiments, and parallel execution, are presented. The management and control of artificial and actual systems, experiment and assessment of emergency plans, and study and training of related personnel can be realized through the PeES. Finally, a preliminary verification of the PeES is conducted using the emergency evacuation of passengers in a fire scene at a rail transportation hub station.
-
二维系统与现代过程控制密切相关, 在污水处理、多维数字滤波器、卫星气象云图分析、图像处理等领域有广泛的应用[1-2].由于二维系统具有丰富的工程物理背景, 至今仍是控制领域的研究热点之一.近年来二维系统的分析和控制器设计方面取得了诸多成果, 如文献[3]给出了二维离散线性模型的稳定性判据, 文献[4]给出了二维离散系统的状态反馈控制器设计方法.在此基础上, 二维系统的滤波器设计、$ {H_\infty} $控制等问题也得到了深入研究[5-6].
另一方面, 现代工业过程对于系统安全性和可靠性的要求日益提高, 因此故障检测与故障诊断问题越来越受到重视[7-10].与一维系统相比, 二维系统由于结构复杂, 其故障检测滤波器/观测器的设计难度更大, 需要提出新技术解决设计过程中遇到的非凸问题.此外, 二维系统的残差评价函数以及阈值的设计亦不同于一维系统, 需根据二维系统的特点构造合适的残差评价函数及阈值.因此, 研究二维系统的故障检测问题是非常必要的, 也是存在挑战的.然而, 现有文献的研究成果相对较少, 其中文献[11-13]研究了二维系统的故障检测问题, 采用了全频设计方法, 即没有考虑故障发生的有限频信息; 文献[14]研究了二维Roesser系统在传感器失效情况下的故障检测问题; 文献[15]研究了二维FM系统的故障检测问题.
文献[16]指出, 系统设计时控制单元和故障检测单元是相互关联和作用的, 如果将控制单元和故障检测单元分开设计, 容易忽视两个单元间的关联性:设计控制单元时容易影响故障检测效果, 而设计故障检测单元时可能会影响控制效果.解决该问题的方法之一是采用集成设计策略, 一方面可减少设计步骤, 一定程度上降低设计的复杂度[17]; 另一方面, 集成设计可以考虑控制单元和故障检测单元的关联性和相互作用, 即兼顾和平衡控制性能和故障检测性能.此外, 集成设计也有助于在控制器中结合容错特性[18].目前, 集成设计的研究成果主要集中在一维系统[19], 二维系统的相关研究成果较少[20]. FM模型作为一类重要的二维系统模型, 其同时故障检测与控制方法具有一定的理论意义和实际应用价值, 但该研究未见相关报道, 这是本文的研究动机之一.
本文研究二维FM系统的同时故障检测与控制问题, 采用有限频性能指标刻画故障和干扰信号的有限频特性, 提出构造切平面方法和两步算法来解决设计过程中出现的非凸问题.本文所设计的故障检测滤波器/控制器可以同时实现控制功能和故障检测功能.此外, 以往研究成果常采用递增的残差评价函数, 故障被排除后容易产生故障误报.本文针对二维系统的故障检测问题, 采用新的残差评价函数, 可降低故障误报率.
1. 系统模型
考虑如下二维离散FM模型[21]:
$$ \begin{align} {\pmb x}({ i} + 1, { j} + 1) = \, & A_1{\pmb x}({ i}, { j} + 1) + A_2{\pmb x}({ i} + 1, { j}) +\\ & B_{{ d}1}{\pmb d}({ i}, { j} + 1) + B_{{ d}2}{\pmb d}({ i} + 1, { j}) +\\ & B_{{ u}1}{\pmb u}({ i}, j + 1) + B_{u2}{\pmb u}({ i}+1, j) +\\ & B_{{ f}1}{\pmb f}({ i}, j + 1) + B_{{ f}2}{\pmb f}({ i} + 1, { j}) \\ \pmb y({ i}, { j}) = \, &C{\pmb x}({ i}, { j}) + D_{ d}{\pmb d}({ i}, { j}) + D_{ f}{\pmb f}({ i}, { j}) \\ \pmb z({ i}, { j}) = \, &E{\pmb x}({ i}, { j}) +F_{ u} {\pmb u}({ i}, { j}) \end{align} $$ (1) 其中, $ \pmb x(i, j) \in {\bf R}^n $为状态向量, $ \pmb d(i, j) \in {\bf R}^{{n_d}} $为外部扰动, $ \pmb f(i, j) \in {\bf R}^{{n_f}} $为故障信号, $ \pmb y(i, j) \in {\bf R}^{{n_y}} $为测量输出, $ \pmb z(i, j)\in {\bf R}^{{n_z}} $为被控输出, $ {A_1} $, $ {A_2} $, $ {B_{u1}} $, $ {B_{u2}} $, $ {B_{f1}} $, $ {B_{f2}} $, $ {B_{d1}} $, $ {B_{d2}} $, $ C $, $ {D_d} $, $ {D_f} $, $ E $, $ {F_u} $为已知的具有适当维数的常数矩阵.
注1. 对于FM模型, 由于状态向量$ \pmb x(i+1, j+1) $可以看做$ i $方向上对$ \pmb x(i, j+1) $或者是在$ j $方向上对$ \pmb x(i, j+1) $进行的一步前移运算, 故FM模型需要三个向量来描述[22].
本文目标是构造如下形式的故障检测滤波器/控制器:
$$ \begin{align} \hat{\pmb x}(i + 1, j + 1) = \, &{\hat A_1} \hat{\pmb x}(i, j + 1) + {\hat A_2} {\hat{\pmb x}}(i + 1, j) +\\ & {\hat B_1}\pmb y(i, j + 1) + {\hat B_2}\pmb y(i + 1, j) \\ \pmb u(i, j) = \, & {\hat C_c} \hat{\pmb x}(i, j) \\ \hat{\pmb y}(i, j) = \, & {\hat C_0} \hat{\pmb x}(i, j) \end{align} $$ (2) 其中, $ \hat{\pmb x}(i, j) \in {\bf R}^n $为状态估计, $ \pmb u(i, j) \in{\bf R}^{{n_u}} $为控制输入, $ \hat{\pmb y}(i, j) \in {\bf R}^{{n_y}} $是对输出的估计, $ {\hat A_1} $, $ {\hat A_2} $, $ {\hat B_1} $, $ {\hat B_2} $, $ {\hat C_0} $, $ {\hat C_c} $是待定的滤波器和控制器参数.
定义$ \bar{\pmb x}(i, j) = \left[{\begin{array}{*{20}{c}} {{\pmb x^{\rm T}(i, j)}}&{ \hat{\pmb x}^{\rm T}(i, j)}\end{array}}\right] ^{\rm T} $, 及残差信号$ \tilde{\pmb y}(i, j) = \pmb y(i, j) - \hat{\pmb y}(i, j), $结合式(1)和式(2)可得增广系统:
$$ \begin{align} \bar{\pmb x}(i + 1, j + 1) = \, & {\bar A_1}\bar{\pmb x}(i, j + 1) + {\bar A_2}\bar{\pmb x}(i+ 1, j)+\\ & {\bar B_{d1}}\pmb d(i, j + 1)+ {\bar B_{d2}}\pmb d(i + 1, j) +\\ & {\bar B_{f1}}\pmb f(i, j + 1)+ {\bar B_{f2}}\pmb f(i + 1, j)\\ \tilde{\pmb y}(i, j) = \, & \tilde C\bar{\pmb x}(i, j) + {\tilde D_d}\pmb d(i, j) + {\tilde D_f}\pmb f(i, j)\\ {\pmb z}(i, j) = \, & \tilde E \bar{\pmb x}(i, j) \end{align} $$ (3) 其中
$$ \begin{align} \, &{\bar A_1} = \left[ {\begin{array}{*{20}{c}} {{A_1}}&{{B_{u1}}{{\hat C}_c}}\\ {{{\hat B}_1}C}&{{{\hat A}_1}} \end{array}} \right], \; {\bar A_2} = \left[ {\begin{array}{*{20}{c}} {{A_2}}&{{B_{u2}}{{\hat C}_c}}\\ {{{\hat B}_2}C}&{{{\hat A}_2}} \end{array}} \right] \\ \, &{\bar B_{d1}} = \left[ {\begin{array}{*{20}{c}} {{B_d}_1}\\ {{{\hat B}_1}{D_d}} \end{array}} \right], \; {\bar B_{d2}} = \left[ {\begin{array}{*{20}{c}} {{B_d}_2}\\ {{{\hat B}_2}{D_d}} \end{array}} \right] \\ \, &{\bar B_{f1}} = \left[ {\begin{array}{*{20}{c}} {{B_{f1}}}\\ {{{\hat B}_1}{D_f}} \end{array}} \right], \; {\bar B_{f2}} = \left[ {\begin{array}{*{20}{c}} {{B_{f2}}}\\ {{{\hat B}_2}{D_f}} \end{array}} \right] \\ \, &\tilde C = [\begin{array}{*{20}{c}} C&{ - {{\hat C}_0}} \end{array}], \; {\tilde D_d} = {D_d} \\ \, &{\tilde D_f} = {D_f}, \; \tilde E = [\begin{array}{*{20}{c}} E&{{F_u}{{\hat C}_c}} \end{array}] \end{align} $$ (4) 2. 问题描述与预备知识
增广系统从故障$ \pmb f(i, j) $、干扰$ \pmb d(i, j) $到残差$ \tilde{\pmb y}(i, j) $和被控输出$ \pmb z(i, j) $的传递函数分别由下式给出:
$$ \begin{align} {G_{\tilde yf}}({\omega _1}, {\omega _2}) = \, &\tilde C{({z_1}{z_2}I - {z_2}{\bar A_1} -{z_1}{\bar A_2})^{-1}}({z_2}{\bar B_{f1}} +\\ & {z_1}{\bar B_{f2}}) +{\tilde D_f} \end{align} $$ (5) $$ \begin{align} {G_{\tilde yd}}({\omega _1}, {\omega _2}) = \, &\tilde C{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{d1}}+\\ & {z_1}{\bar B_{d2}}) + {\tilde D_d} \end{align} $$ (6) $$ \begin{align} {G_{zf}}({\omega _1}, {\omega _2}) = \, &\tilde E{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{f1}}+ {z_1}{\bar B_{f2}}) \end{align} $$ (7) $$ \begin{align} {G_{zd}}({\omega _1}, {\omega _2}) = \, &\tilde E{({z_1}{z_2}I - {z_2}{\bar A_1} - {z_1}{\bar A_2})^{ - 1}}({z_2}{\bar B_{d1}}+ {z_1}{\bar B_{d2}}) \end{align} $$ (8) 其中, $ {z_1} = {{\rm e}^{j\omega_1}} $, $ {z_2} = {{\rm e}^{j\omega_2}} $.
本文要讨论的问题可归纳为:对于给定的二维FM系统, 设计故障检测滤波器/控制器(2), 使增广系统(3)渐近稳定, 同时满足如下控制指标和故障检测指标:
$$ \begin{align} &\inf {\sigma _{\min }}({G_{\tilde yf}}({\omega _1}, {\omega _2})) > {\gamma _1}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{11}}, \left| {{\omega _2}} \right| \le {\bar \omega _{12}} \end{align} $$ (9) $$ \begin{align} &\sup {\sigma _{\max }}({G_{zf}}({\omega _1}, {\omega _2})) < {\beta _1}, \; \forall \left| {{\omega _1}} \right| \le {\bar \omega _{11}}, \left| {{\omega _2}} \right| \le {\bar \omega _{12}} \end{align} $$ (10) $$ \begin{align} &\sup {\sigma _{\max }}({G_{\tilde yd}}({\omega _1}, {\omega _2})) < {\gamma _2}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{21}}, \left| {{\omega _2}} \right| \le {\bar \omega _{22}} \end{align} $$ (11) $$ \begin{align} &\sup {\sigma _{\max }}({G_{zd}}({\omega _1}, {\omega _2})) < {\beta _2}, \;\forall \left| {{\omega _1}} \right| \le {\bar \omega _{21}}, \left| {{\omega _2}} \right| \le {\bar \omega _{22}} \end{align} $$ (12) 这里, $ {\gamma _1} $, $ {\gamma _2} $, $ {\beta _1} $, $ {\beta _2} $是给定的正标量, $ {\bar \omega _{k1}} $, $ {\bar \omega _{k2}} \in \left[ {0, \pi } \right] $, $ k = 1, 2 $.
注2. 有限频$ {H_ - } $指标(9)和有限频$ {H_\infty} $指标(10)$ \sim $ (12)是相应全频域指标的推广, 当$ {\bar \omega _{11}} = \bar \omega _{12} = \bar \omega _{21} = \bar \omega _{22} = \pi $时, 有限频性能指标退化为全频性能指标.
注3. 式(9)和式(11)为故障检测性能指标, 这两个指标保证了发生在有限频域的故障对残差信号有足够大的影响, 同时外部干扰对残差信号的影响较小; 式(10)和式(12)为控制性能指标, 即抑制故障和干扰信号对被控输出的影响, 保证系统有一定的鲁棒性.
本文需要用到如下引理:
引理 1[23]. 对于给定的对称矩阵$ \Psi $和矩阵$ \Gamma $, $ \Lambda $, 存在矩阵$ X $, 满足$ \Psi + \Gamma X{\Lambda ^{\rm T}} + \Lambda {X^{\rm T}}\Gamma < 0 $, 当且仅当以下等式成立:
$$ \begin{align} {\Gamma ^ \bot }\Psi {\Gamma ^ \bot }^{\rm T} < 0 , {\Lambda ^ \bot }\Psi {\Lambda ^ \bot }^{\rm T} < 0 \end{align} $$ 引理 2[24]. 假设$ \pmb \xi \in {\bf R}^n $, $ P = {P^{\rm T}} \in {\bf R}^{n \times n} $, $ H \in {\bf R}^{m \times n} $, rank$ (H) = r < n $, 则下列命题等价:
i) $ {\pmb \xi ^{\rm T}}P\pmb \xi < 0, \; \; \forall H\pmb \xi = 0, \pmb \xi \ne 0 $
ii) $ \exists X\in {\bf R}^{n \times m}, \; \; P + X^{\rm T}H^{\rm T} + H {X} < 0 $
引理 3[25]. 对于增广系统(3), 假设存在条件$ \det ({z_1}{z_2}I - $ $ {z_2}{\bar A_1}-{z_1}{\bar A_2})^{- 1}\ne 0 $, $ \forall \left({{z_1}, {z_2}} \right) \in \Big\{ {\left( {{z_1}, {z_2}} \right) \in {{\bf C} \times {\bf {C}}}:\left| {{z_1}} \right| \ge 1, \left| {{z_2}} \right| \ge 1} \Big\} $, 给定对称矩阵$ {\Theta} $和标量$ {\bar \omega _1}, $ $ {\bar \omega _2} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {P_k}, $ $ {Q_k}>0 \in{ {{\bf {C}}}^{n \times n}} $, $ k = 1, 2 $, 使得下式成立:
$$ \begin{align} {\left[ {\begin{array}{*{20}{c}} {\bar A}&{{{\bar B}_f}}\\ I&0 \end{array}} \right]^{\rm T}}{\Sigma}\left[ {\begin{array}{*{20}{c}} {\bar A}&{{{\bar B}_f}}\\ I&0 \end{array}} \right] + {\Theta}< 0 \end{align} $$ (13) 其中
$$ \begin{equation} \begin{aligned} \bar A & = \left[ {{{\bar A}_1}, {{\bar A}_2}} \right], {\Sigma } = \left[ {\begin{array}{*{20}{c}} P&Q\\ *&\Delta \end{array}} \right]\\ P& = {P_1} + {P_2}, Q = \left[ {\begin{array}{*{20}{c}} {Q_1}&{Q_2} \end{array}} \right], {\bar B_f} = \left[ {\begin{array}{*{20}{c}} {\bar B_{f1}}&{\bar B_{f2}} \end{array}} \right]\\ \Delta& = {\rm diag}\left\{{-{P_1}-2\cos{{\bar\omega}_1}{Q_1}, -{P_2}- 2\cos{{\bar\omega}_2}{Q_2}} \right\}\\ \bar C & = {\rm diag}\left\{ {\tilde C, \tilde C} \right\}, {\bar D_f} = {\rm diag}\left\{ {{{\tilde D}_f}, {{\tilde D}_f}} \right\} \end{aligned} \end{equation} $$ (14) 则下面的有限频条件成立:
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {\bar G\left( {{\omega _1}, {\omega _2}} \right)}\\ {I\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right]^{\rm T} {\Theta} \left[ {\begin{array}{*{20}{c}} {\bar G\left( {{\omega _1}, {\omega _2}} \right)}\\ {I\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right] < 0, \; \forall ({\omega _1}, {\omega _2}) \in \Omega \end{equation} $$ (15) 其中
$$ \begin{equation} \begin{aligned} &\bar G\left( {{\omega _1}, {\omega _2}} \right) = {\left[ {\begin{array}{*{20}{c}} {{{\rm e}^{{\rm j}{\omega _2}}}G\left( {{\omega _1}, {\omega _2}} \right)}\\ {{{\rm e}^{{\rm j}{\omega _1}}}G\left( {{\omega _1}, {\omega _2}} \right)} \end{array}} \right]}\\ &I\left( {{\omega _1}, {\omega _2}} \right) = \left[ {\begin{array}{*{20}{c}} {{{\rm e}^{{\rm j}{\omega _2}}}{I}}\\ {{{\rm e}^{{\rm j}{\omega _1}}}{I}} \end{array}} \right]\\ &G({\omega _1}, {\omega _2}) = ({{\rm e}^{{\rm j}({\omega _1} + {\omega _2})}}{I_n} - {{\rm e}^{{\rm j}{\omega _2}}}{{\bar A_1}}-\\ &\qquad \qquad {{\rm e}^{{\rm j}{\omega _1}}}{\bar A_2})^{ - 1}({{\rm e}^{{\rm j}{\omega _2}}}{\bar B_{f1}} + {{\rm e}^{{\rm j}{\omega _1}}}{\bar B_{f2}})\\ &\Omega = \left[ { - {{\bar \omega }_1}, {{\bar \omega }_1}} \right] \times \left[ { - {{\bar \omega }_2}, {{\bar \omega }_2}} \right] \end{aligned} \end{equation} $$ (16) 引理 4[26]. 若存在正定矩阵$ P_{s1}, P_{s2} $使得下式成立
$$ \begin{equation} {\left[ {\begin{array}{*{20}{c}} {\bar A}\\ I \end{array}} \right]^{\rm T}}\left[ {\begin{array}{*{20}{c}} P_s&0\\ 0&{{\rm diag}\left\{ { - {P_{s1}}, - {P_{s2}} }\right\}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar A}\\ I \end{array}} \right] < 0 \end{equation} $$ (17) 则增广系统(3)渐近稳定, 其中$ P_s = P_{s1}+P_{s2} $.
3. 主要结果
定理 1. 给定标量$ {\bar \omega _{11}} $, $ {\bar \omega _{12}} \in \left[ {0, \pi } \right] $, $ {\gamma _1} > 0 $, $ \alpha > 0 $, 如果存在对称矩阵$ {P_{k1}} $, $ {P_{k3}} $, $ {Q_{k1}} $, $ {Q_{k3}} $和矩阵$ {P_{k2}} $, $ {Q_{k2}} $, $ k = 1, 2 $, $ {G_1} $, $ {G_2} $, $ {G_3} $, $ {F_1} $, $ {F_2} $, $ {F_3} $, $ {F_4} $, $ {H_1} $, $ {H_2} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使不等式(18)$ \, \sim\, $(20)成立, 则增广系统(3)满足性能指标(9).
$$ \begin{equation} {\alpha ^2} - {\hat C_0}T < 0 \end{equation} $$ (18) $$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{Q_{k1}}}&{{Q_{k2}}}\\ {Q_{k2}^{\rm T}}&{{Q_{k3}}} \end{array}} \right] > 0, \quad k = 1, 2 \end{equation} $$ (19) $$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\gamma _{11}}}&{{\gamma _{12}}}&{{\gamma _{13}}}&{{\gamma _{14}}}&{{\gamma _{15}}}&{{\gamma _{16}}}&{{\gamma _{17}}}&{{\gamma _{18}}}\\ *&{{\gamma _{22}}}&{{\gamma _{23}}}&{{\gamma _{24}}}&{{\gamma _{25}}}&{{\gamma _{26}}}&{{\gamma _{27}}}&{{\gamma _{28}}}\\ *&*&{{\gamma _{33}}}&{{\gamma _{34}}}&{{\gamma _{35}}}&{{\gamma _{36}}}&{{\gamma _{37}}}&{{\gamma _{38}}}\\ *&*&*&{{\gamma _{44}}}&{{\gamma _{45}}}&{{\gamma _{46}}}&{{\gamma _{47}}}&{{\gamma _{48}}}\\ *&*&*&*&{{\gamma _{55}}}&{{\gamma _{56}}}&{{\gamma _{57}}}&{{\gamma _{58}}}\\ *&*&*&*&*&{{\gamma _{66}}}&{{\gamma _{67}}}&{{\gamma _{68}}}\\ *&*&*&*&*&*&{{\gamma _{77}}}&{{\gamma _{78}}}\\ *&*&*&*&*&*&*&{{\gamma _{88}}} \end{array}} \right] < 0 \end{equation} $$ (20) 其中
$$ \begin{align*} {\gamma _{11}} = \, & {P_{11}}+{P_{21}} - {G_1} - G_1^{\rm T}\\ {\gamma _{12}} = \, & {P_{12}}+{P_{22}} - {G_3} - G_2^{\rm T}\\ {\gamma _{13}} = \, & {Q_{11}} + {G_1}{A_1} + {\tilde B_1}C- F_1^{\rm T}\\ {\gamma _{14}} = \, & {Q_{12}} + {G_1}{B_{u1}}{\hat C_c} + {\tilde A_1}- F_2^{\rm T}\\ {\gamma _{15}} = \, & {Q_{21}} + {G_1}{A_2} + {\tilde B_2}C- F_3^{\rm T}\nonumber\\ {\gamma _{16}} = \, & {Q_{22}} + {G_1}{B_{u2}}{\hat C_c} + {\tilde A_2}- F_4^{\rm T}\\ {\gamma _{17}} = \, & {G_1}{B_{f1}} + {\tilde B_1}{D_f} -H_1^{\rm T}\nonumber\\ {\gamma _{18}} = \, & {G_1}{B_{f2}} + {\tilde B_2}{D_f} -H_2^{\rm T}\nonumber\\ {\gamma _{22}} = \, & {P_{13}}+{P_{23}} - {G_3} - G_3^{\rm T}\\ {\gamma _{23}} = \, & Q_{12}^{\rm T} -G_{3}^{\rm T}+ {G_2}{A_1} + {\tilde B_1}C\nonumber\\ {\gamma _{24}} = \, & {Q_{13}}-{G_{3}^{\rm T}}+{G_2}{B_{u2}}{\hat C_c} +{\tilde A_1}\\ {\gamma _{25}} = \, & Q_{22}^{\rm T} -{G_{3}^{\rm T}}+ {G_2}{A_2} + {\tilde B_2}C\\ {\gamma_{26}} = \, & {G_2}{B_{u2}}{\hat C_c} + {\tilde A_2} + {Q_{23}}-G_3^{\rm T} \end{align*} $$ $$ \begin{align} {\gamma _{27}} = \, & {G_2}{B_{f1}} + {\tilde B_1}{D_f}\\ {\gamma _{28}} = \, & {G_2}{B_{f2}} + {\tilde B_2}{D_f}\\ {\gamma_{33}} = \, & - {P_{11}} - 2\cos {\bar\omega _{11}}{Q_{11}} - {C^{\rm T}}C+\\ & {F_1}{A_1} + {\tilde B_1}C + {({F_1}{A_1} + {\tilde B_1}C)^{\rm T}}\\ {\gamma _{34}} = \, & - {P_{12}} - 2\cos {\bar\omega _{12}}{Q_{12}} - {C^{\rm T}}{\hat C_0}+\\ & ({F_1}{B_{u1}}{\hat C_c} + {\tilde A_1}) + {({F_2}{A_1} + {\tilde B_1}C)^{\rm T}}\\ {\gamma _{35}} = \, & {({F_3}{A_1} + {\tilde B_1}C)^{\rm T}} + {F_1}{A_2} + {\tilde B_2}C\\ {\gamma _{36}} = \, & {F_1}{B_{u2}}{\hat C_c} + {\tilde A_2} + {({F_4}{A_1} + {\tilde B_1}C)^{\rm T}} \\ {\gamma _{37}} = \, &{F_1}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{A_1})^{\rm T}} -{{C}^{\rm T}}{D_f}\\ {\gamma _{38}} = \, &{F_1}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{A_1})^{\rm T}}\\ {\gamma _{44}} = \, & - {P_{13}} - 2\cos {\bar\omega_{11}}{Q_{13}} +{F_2}{B_{u1}}{\hat C_c} + {\tilde A_1}+\\ & {({F_2}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} - {\alpha ^2}I \\ {\gamma _{45}} = \, & ({F_2}{A_2} + {\tilde B_2}C) + {({F_3}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}}\\ {\gamma _{46}} = \, &{F_2}{B_{u2}}{\hat C_c} + {\tilde A_2} + {({F_4}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} \\ {\gamma _{47}} = \, & {F_2}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{B_{u1}}{\hat C_c})^{\rm T}} + {{\hat C_0}^{\rm T}}{D_f} \\ {\gamma _{48}} = \, & {F_2}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{B_{u1}}{\hat C_c})^{\rm T}} \\ {\gamma _{55}} = \, & - {P_{21}} - 2\cos {\bar\omega _{11}}{Q_{21}} + {F_3}{A_2} + {\tilde B_2}C +\\ & {({F_3}{A_2} + {\tilde B_2}C)^{\rm T}} - {C^{\rm T}}C \\ {\gamma _{56}} = \, & - {P_{22}} - 2\cos {\bar\omega _{12}}{Q_{22}} + {F_3}{B_{u2}}{\hat C_c}+ {\tilde A_2}+\\ & {C^{\rm T}}{\hat C_0} + {({F_4}{A_2} + {\tilde B_2}C)^{\rm T}} \\ {\gamma _{57}} = \, & {F_3}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{A_2})^{\rm T}} \\ {\gamma _{58}} = \, & {F_3}{B_{f2}} + {({H_2}{A_2})^{\rm T}} + {\tilde B_2}{D_f} - {{C}^{\rm T}}{D_f}\\ {\gamma _{66}} = \, & - {P_{23}} - 2\cos {\bar\omega _{12}}{Q_{23}} - {{\alpha ^2}I } + {F_4}{B_{u2}}{\hat C_c}+\\ & {\tilde A_2} + {({F_4}{B_{u2}}{\hat C_c} + {\tilde A_2})^{\rm T}}, \\ {\gamma _{67}} = \, & {F_4}{B_{f1}} + {\tilde B_1}{D_f} + {({H_1}{B_{u2}}{\hat C_c})^{\rm T}}\\ {\gamma _{68}} = \, &{F_4}{B_{f2}} + {\tilde B_2}{D_f} + {({H_2}{B_{u2}}{\hat C_c})^{\rm T}} + {{\hat C_0}}{D_f} \\ {\gamma _{77}} = \, & {H_1}{B_{f1}} + {({H_1}{B_{f1}})^{\rm T}} + {\gamma _1}^2I - {D_f}^{\rm T}{D_f} \\ {\gamma _{78}} = \, & {H_1}{B_{f2}} + {({H_2}{B_{f1}})^{\rm T}}\\ {\gamma _{88}} = \, & {H_2}{B_{f2}} + {({H_2}{B_{f2}})^{\rm T}} + {\gamma _1}^2I - {D_f}^{\rm T}{D_f} \end{align} $$ (21) 证明. 令式(13)中的
$$ \begin{equation*} \begin{aligned} \Theta = \, &\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_f}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} {-I}&0\\ 0&{\gamma _1}^2I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_f}\\ I&0 \end{array}} \right] \end{aligned} \end{equation*} $$ 则有限频条件(15)等价于$ {{G^{\rm T}}_{\tilde yf}}({\omega _1}, {\omega _2}){G}_{\tilde yf}({\omega _1}, {\omega _2})>{\gamma _1}^2I $, 即性能指标(9).由引理3知, 若式(13)成立, 则增广系统(3) $满足性能指标(9).式(13)可改写为
$$ \begin{equation} \begin{aligned} {\Lambda^{\rm T}}\Omega \ {\Lambda } < 0 \end{aligned} \end{equation} $$ (22) 其中
$$ \begin{align*} \Lambda = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_f^{\rm T}}&0&I \end{array}} \right]^{\rm T} \end{align*} $$ $$ \begin{align*} \Omega = \, & \left[ {\begin{array}{*{20}{c}} I&0\\ 0&I\\ 0&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} P&Q\\ *&\Delta \end{array}} \right]\left[ {\begin{array}{*{20}{c}} I&0&0\\ 0&I&0 \end{array}} \right]+\\ & \left[ {\begin{array}{*{20}{c}} 0&0\\ {{{\bar C}^{\rm T}}}&0\\ {\bar D_f^{\rm T}}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { - I}&0\\ *&{{\gamma _1}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} 0&{\bar C}&{{\bar D_f}}\\ 0&0&I \end{array}} \right] \end{align*} $$ 令
$$ \begin{equation*} \Gamma = \left[ {\begin{array}{*{20}{c}} { - I}&{\bar A}&{{{\bar B}_f}} \end{array}} \right]^{\rm T}, \quad \pmb \eta = \Lambda \pmb \xi \end{equation*} $$ 则有$ {\Gamma ^{{\rm T}}}\pmb \eta = {\Gamma ^{{\rm T}}}\Lambda \pmb \xi = 0 $.根据引理2, 若以下不等式成立:
$$ \begin{equation*} \Omega + \Gamma {\rm X} + {{\rm X}^{\rm T}}{\Gamma ^{\rm T}} < 0 \end{equation*} $$ 则式(22)成立.取$ {X} = \left[ {\begin{array}{*{20}{c}} {{G^{\rm T}}}&{{F^{\rm T}}}&{{H^{\rm T}}} \end{array}} \right] $,
$$ \begin{equation*} \begin{aligned} G = \left[ {\begin{array}{*{20}{c}} {{G_1}}&{{G_3}}\\ {{G_2}}&{{G_3}} \end{array}} \right], F = \left[ {\begin{array}{*{20}{c}} {{F_1}}&{{G_3}}\\ {{F_2}}&{{G_3}}\\ {{F_3}}&{{G_3}}\\ {{F_4}}&{{G_3}} \end{array}} \right], H = \left[ {\begin{array}{*{20}{c}} {{H_1}}&0\\ {{H_2}}&0 \end{array}} \right] \end{aligned} \end{equation*} $$ 令$ {\tilde A_k} = {G_3}{\hat A_k} $, $ {\tilde B_k} = {G_3}{\hat B_k} $, $ k = 1, 2 $, 并将式(4)中相关矩阵代入, 可得
$$ \begin{equation*} \left[ {\begin{array}{*{20}{c}} {{\gamma _{11}}}&{{\gamma _{12}}}&{{\gamma _{13}}}&{{\gamma _{14}}}&{{\gamma _{15}}}&{{\gamma _{16}}}&{{\gamma _{17}}}&{{\gamma _{18}}}\\ *&{{\gamma _{22}}}&{{\gamma _{23}}}&{{\gamma _{24}}}&{{\gamma _{25}}}&{{\gamma _{26}}}&{{\gamma _{27}}}&{{\gamma _{28}}}\\ *&*&{{\gamma _{33}}}&{{\gamma _{34}}}&{{\gamma _{35}}}&{{\gamma _{36}}}&{{\gamma _{37}}}&{{\gamma _{38}}}\\ *&*&*&{{{\tilde \gamma }_{44}}}&{{\gamma _{45}}}&{{\gamma _{46}}}&{{\gamma _{47}}}&{{\gamma _{48}}}\\ *&*&*&*&{{\gamma _{55}}}&{{\gamma _{56}}}&{{\gamma _{57}}}&{{\gamma _{58}}}\\ *&*&*&*&*&{{{\tilde \gamma }_{66}}}&{{\gamma _{67}}}&{{\gamma _{68}}}\\ *&*&*&*&*&*&{{\gamma _{77}}}&{{\gamma _{78}}}\\ *&*&*&*&*&*&*&{{\gamma _{88}}} \end{array}} \right] < 0 \end{equation*} $$ 其中
$$ \begin{equation*} \begin{aligned} {\tilde \gamma _{44}} = \, & - {P_{13}} - 2\cos {\bar \omega _{11}}{Q_{13}} +{F_2}{B_{u1}}{\hat C_c} + {\tilde A_1}+\\ & {({F_2}{B_{u1}}{\hat C_c} + {\tilde A_1})^{\rm T}} - \hat C_0^{\rm T}{\hat C_0}\\ {\tilde \gamma _{66}} = \, & - {P_{23}} - 2\cos {\bar \omega _{12}}{Q_{23}} -{\hat C_0}^{\rm T}{\hat C_0} + {F_4}{B_{u2}}{\hat C_c}+\\ & {\tilde A_2} + {({F_4}{B_{u2}}{\hat C_c} + {\tilde A_2})^{\rm T}}\\ \end{aligned} \end{equation*} $$ 其他参数在式(21)中给出.需要注意的是$ {\tilde \gamma _{44}} $、$ {\tilde \gamma _{66}} $中存在耦合项$ \hat C_0^{\rm T}{\hat C_0} $.下面采用文献[27]中提出的方法, 给出处理耦合项的方案.假设$ {\hat C_0} $为行向量, 首先给出$ \hat C_0^{\rm T}{\hat C_0} $的上界, 即
$$ \begin{equation} \hat C_0^{\rm T}{\hat C_0} > {\alpha ^2}I \end{equation} $$ (23) 上式表明$ {\hat C_0} $的可行解是非凸的, 令
$$ {\hat C_0}T - {\left\| T \right\|_2}^2 = 0 $$ 其中, $ {\left\| T \right\|_2} = \alpha $表示半径为$ \alpha $的球的切平面, 则通过约束条件(18)即可找到式(23)的解的凸子集.由引理3可知, 若式(18)$ \, \sim\, $(20)成立, 则增广系统(3)满足性能指标(9).
注4. 该方法需要假设$ {\hat C_0} $为行向量, 即系统为单输入, 具有一定的局限性.
接下来考虑系统故障检测的鲁棒性条件.令$ \pmb f(i, j) = 0 $, 则增广系统变为
$$ \begin{align} \bar{\pmb x}(i + 1, j + 1) = \, &{\bar A_1}\pmb x(i, j + 1) + {\bar A_2} \pmb x(i + 1, j)+\\ & {\bar B_{d1}}\pmb d(i, j + 1) + {\bar B_{d2}}\pmb d(i + 1, j) \end{align} $$ (24) 下面定理给出增广系统(3)满足性能指标(11)的充分条件.
定理 2. 给定标量$ {\bar \omega_{21}} $, $ {\bar\omega_{22}}\in\left[{0, \pi}\right] $, $ {\gamma_2}>0 $, 如果存在对称矩阵$ {P_{m1}} $, $ {P_{m2}} $, $ {Q_{m1}>0} $, $ {Q_{m2}}>0 $, 矩阵$ {M_1} $, $ {M_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使不等式(25)成立, 则增广系统(3)满足性能指标(11).
$$ \begin{equation*} \left[ {\begin{array}{*{20}{c}} {{\Gamma _{11}}}&{{\Gamma _{12}}}&{{\Gamma _{13}}}&0\\ *&{{\Delta _m}}&0&{{\Gamma _{24}}}\\ *&*&{ - {\gamma _2}^2I}&{{\Gamma _{34}}}\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation*} $$ (25) 其中
$$ \begin{equation*} \begin{aligned} \Gamma _{11} = \, & {P_{m1}} + {P_{m2}} - He\left[ {\begin{array}{*{20}{c}} {{M_1}}&{{G_3}}\\ {{M_2}}&{{G_3}} \end{array}} \right]\\ {\Gamma _{12}} = \, & \left[ {\begin{array}{*{20}{c}} {{Q_{m1}}}&{{Q_{m2}}} \end{array}} \right]+\left[ {\begin{array}{*{20}{c}} {{\Gamma_{m1}}}&{{\Gamma_{m2}}} \end{array}} \right]\\ {{\Gamma_{m1}}} = \, &\left[\begin{array}{cc} {{M_1}{A_1} + {{\tilde B}_1}C}&{{M_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{M_2}{A_1} + {{\tilde B}_1}C}&{{M_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {{\Gamma_{m2}}} = \, &\left[\begin{array}{cc} {{M_1}{A_2} + {{\tilde B}_2}C}&{{M_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{M_2}{A_2} + {{\tilde B}_2}C}&{{M_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right]\\ \Gamma _{13} = \, &\left[ {\begin{array}{*{20}{c}} {{M_1}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{M_1}{B_{d2}} + {{\tilde B}_2}{D_d}}\\ {{M_2}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{M_2}{B_{d2}} + {{\tilde B}_2}{D_d}} \end{array}} \right]\\ {\Gamma _{24}} = \, &\left[ {\begin{array}{*{20}{c}} {{C^{\rm T}}}&0\\ { - {{\hat C}_0}^{\rm T}}&0\\ 0&{{C^{\rm T}}}\\ 0&{ - {{\hat C}_0}^{\rm T}} \end{array}} \right], {\Gamma _{34}} = {\rm diag}\left\{ {{{\tilde D}_d}, {{\tilde D}_d}} \right\} \end{aligned} \end{equation*} $$ 证明. 由引理3知, 若存在矩阵
$$ \begin{align*} {P_m} = \, & {P_{m1}} + {P_{m2}}, {Q_m} = \left[ {\begin{array}{*{20}{c}} {{Q_{m1}}}&{{Q_{m2}}}\end{array}}\right], \\ {\Delta _m} = \, & {\rm diag}\Big\{ - {P_{m1}} - 2\cos {{\bar \omega }_{21}}{Q_{m1}}, - {P_{m2}} - \\& 2\cos {{\bar \omega }_{22}}{Q_{m2}} \Big\} \end{align*} $$ 使如下不等式成立:
$$ \begin{equation*} \begin{aligned} &\left[ {\begin{array}{*{20}{c}} {\bar A}&{\bar B_d}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} P_m&Q_m\\ *&\Delta_m \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar A}&{\bar B_d}\\ I&0 \end{array}} \right]+\\ & \qquad \left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_d}\\ I&0 \end{array}} \right]^{\rm T}\left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\gamma _2}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\bar C}&{\bar D_d}\\ I&0 \end{array}} \right]<0 \end{aligned} \end{equation*} $$ 则增广系统(3)满足性能指标(11).上式可改写为
$$ \begin{equation} {{\Upsilon} ^{\rm T}}{\Omega_1} {\Upsilon } < 0 \end{equation} $$ (26) 其中
$$ \begin{equation*} \begin{aligned} \Upsilon = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_d^{\rm T}}&0&I \end{array}} \right]^{\rm T}\\ {\Omega_1} = \, & \left[ {\begin{array}{*{20}{c}} I&0\\ 0&I\\ 0&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} P_m&Q_m\\ *&\Delta_m \end{array}} \right]\left[ {\begin{array}{*{20}{c}} I&0&0\\ 0&I&0 \end{array}} \right]+\\ & \left[ {\begin{array}{*{20}{c}} 0&0\\ {{{\bar C}^{\rm T}}}&0\\ {\bar D_d^{\rm T}}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { I}&0\\ *&{{-\gamma _2}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} 0&{\bar C}&{{\bar D_d}}\\ 0&0&I \end{array}} \right]\\ {\bar B_d} = \, & \left[ {\begin{array}{*{20}{c}} {{{\bar B}_{d1}}}&{{{\bar B}_{d2}}} \end{array}} \right]\\ {\bar D_d} = \, & \left[ {\begin{array}{*{20}{c}} {{{\tilde D}_d}}&0\\ 0&{{{\tilde D}_d}} \end{array}} \right] \end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \Gamma_m = {\left[ {\begin{array}{*{20}{c}} { - I}&{\bar A}&{{{\bar B}_d}} \end{array}} \right]}^{\rm T} \end{equation*} $$ 则$ {{\Gamma_m}^ \bot } = \left[ {\begin{array}{*{20}{c}} {{{\bar A}^{\rm T}}}&I&0\\ {\bar B_d^{\rm T}}&0&I \end{array}} \right] $.根据引理1, 下式与式(26)等价,
$$ \begin{equation*} {\Omega_1}+ He\left( {\Gamma_m {M^{\rm T}}{Z ^{\rm T}}} \right) < 0 \end{equation*} $$ (27) 取$ Z = \left[ {\begin{array}{*{20}{c}} I&0&0 \end{array}} \right]^{\rm T} $, $ M = \left[ {\begin{array}{*{20}{c}} {{M_1}}&{{G_3}}\\ {{M_2}}&{{G_3}} \end{array}} \right] $, 并令$ {\tilde A_k} = {G_3}{\hat A_k} $, $ {\tilde B_k} = {G_3}{\hat B_k} $, $ k = 1, 2 $, 利用Schur $补引理可证.
定理 3. 给定标量$ {\bar \omega_{11}} $, $ {\bar\omega_{12}}\in\left[{0, \pi}\right] $, $ {\beta _1} > 0 $, 如果存在对称矩阵$ {P_{r1}} $, $ {P_{r2}} $, $ {Q_{r1}>0} $, $ {Q_{r2}>0} $, 矩阵$ {R_1} $, $ {R_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使得不等式(26)成立, 则增广系统(3)满足性能指标(10).
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Xi _{11}}}&{{\Xi _{12}}}&{{\Xi _{13}}}&0\\ *&{{\Delta _r}}&0&{{\Xi _{24}}}\\ *&*&{ - \beta_1^2I}&0\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation} $$ (28) 其中
$$ \begin{equation*} \begin{aligned} {\Xi _{11}} = \, & {P_{r1}} + {P_{r2}} - He\left[ {\begin{array}{*{20}{c}} {{R_1}}&{{G_3}}\\ {{R_2}}&{{G_3}} \end{array}} \right]\\ {\Xi _{12}} = \, & \left[ {\begin{array}{*{20}{c}} {{Q_{r1}}}&{{Q_{r2}}} \end{array}} \right]+ \left[ {\begin{array}{*{20}{c}} {{\Xi_{r1}}}&{{\Xi_{r2}}} \end{array}} \right]\\ {{\Xi_{r1}}} = \, &\left[\begin{array}{cc} {{R_1}{A_1} + {{\tilde B}_1}C}&{{R_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{R_2}{A_1} + {{\tilde B}_1}C}&{{R_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {{\Xi_{r2}}} = \, &\left[\begin{array}{cc} {{R_1}{A_2} + {{\tilde B}_2}C}&{{R_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{R_2}{A_2} + {{\tilde B}_2}C}&{{R_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right] \nonumber\\ {\Xi _{13}} = \, &\left[ {\begin{array}{*{20}{c}} {{R_1}{B_{f1}} + {{\tilde B}_1}{D_f}}&{{R_1}{B_{f2}} + {{\tilde B}_2}{D_f}}\\ {{R_2}{B_{f1}} + {{\tilde B}_1}{D_f}}&{{R_2}{B_{f2}} + {{\tilde B}_2}{D_f}} \end{array}} \right]\\ {\Xi _{24}} = \, & \left[ {\begin{array}{*{20}{c}} {{E^{\rm T}}}&0\\ { ({F_u}\hat C_c)^{\rm T}}&0\\ 0&{{E^{\rm T}}}\\ 0&{ ({F_u}\hat C_c)^{\rm T}} \end{array}} \right]\end{aligned} \end{equation*} $$ $$ \begin{equation*} {\Delta _r} = {\rm diag}\{ { - {P_{r1}} - 2\cos {{\bar \omega }_{11}}{Q_{r1}}, - {P_{r2}} - 2\cos {{\bar \omega }_{12}}{Q_{r2}}} \} \end{equation*} $$ 证明. 参考定理2证明过程.
定理 4. 给定标量$ {\bar \omega_{21}} $, $ {\bar\omega_{22}}\in\left[{0, \pi}\right] $, $ {\beta _2} > 0 $, 如果存在对称矩阵$ {P_{u1}} $, $ {P_{u2}} $, $ {Q_{u1}>0} $, $ {Q_{u2}}>0 $, 矩阵$ {U_1} $, $ {U_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $, $ {\hat C_0} $, $ {\hat C_c} $使得不等式(27)成立, 则增广系统$ (3)满足性能指标(12).
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Omega _{11}}}&{{\Omega _{12}}}&{{\Omega _{13}}}&0\\ *&{{\Delta _u}}&0&{{\Xi _{24}}}\\ *&*&{ - \beta _2^2I}&0\\ *&*&*&{ - I} \end{array}} \right] < 0 \end{equation} $$ (29) 其中
$$ \begin{equation*} \begin{aligned} {\Omega _{11}} = \, & {P_{u1}} + {P_{u2}} - He\left[ {\begin{array}{*{20}{c}} {{U_1}}&{{G_3}}\\ {{U_2}}&{{G_3}} \end{array}} \right]\\ {\Omega _{12}} = \, &\left[ {\begin{array}{*{20}{c}} {{Q_{u1}}}&{{Q_{u2}}} \end{array}} \right]+\left[ {\begin{array}{*{20}{c}} {\Omega _{u1}}&{\Omega _{u2}} \end{array}} \right]\\ {\Omega _{u1}} = \, &\left[\begin{array}{cc} {{U_1}{A_1} + {{\tilde B}_1}C}&{{U_1}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ {{U_2}{A_1} + {{\tilde B}_1}C}&{{U_2}{{ B}_{u1}}{{\hat C}_c} + {{\tilde A}_1}}\\ \end{array}\right]\\ {\Omega _{u2}} = \, &\left[\begin{array}{cc} {{U_1}{A_2} + {{\tilde B}_2}C}&{{U_1}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ {{U_2}{A_2} + {{\tilde B}_2}C}&{{U_2}{{ B}_{u2}}{{\hat C}_c} + {{\tilde A}_2}}\\ \end{array}\right] \nonumber\\ {\Omega _{13}} = \, & \left[ {\begin{array}{*{20}{c}} {{U_1}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{U_1}{B_{d2}} + {{\tilde B}_2}{D_d}}\\ {{U_2}{B_{d1}} + {{\tilde B}_1}{D_d}}&{{U_2}{B_{d2}} + {{\tilde B}_2}{D_d}} \end{array}} \right] \end{aligned} \end{equation*} $$ $$ \begin{equation*} {\Delta _u} = {\rm diag}\{ { - {P_{u1}} - 2\cos {{\bar \omega }_{21}}{Q_{u1}}, - {P_{u2}} - 2\cos {{\bar \omega }_{22}}{Q_{u2}}} \} \end{equation*} $$ 证明. 参考定理2证明过程.
定理1~4给出了故障检测滤波器/控制器设计需满足的有限频域性能条件, 由于广义KYP引理并不隐含系统的稳定性[28], 因此这些条件并不能保证所设计的系统是稳定的.下面给出增广系统(3)渐近稳定的充分条件:
定理 5. 如果存在正定矩阵$ { P_{s1}} $, $ { P_{s2}} $, 矩阵$ {S_1} $, $ {S_2} $, $ {G_3} $, $ {\tilde A_1} $, $ {\tilde A_2} $, $ {\tilde B_1} $, $ {\tilde B_2} $使不等式(28)成立, 则增广系统(3)渐近稳定.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Psi _{11}}}&{{\Psi _{12}}}\\ *&{{\Psi _{22}}} \end{array}} \right] < 0 \end{equation} $$ (30) 其中
$$ \begin{equation*} \begin{aligned} {\Psi _{11}} = \, & { P_{s1}} + { P_{s2}} - \left[ {\begin{array}{*{20}{c}} {{S_1} + S_1^{\rm T}}&{{G_3} + S_2^{\rm T}}\\ {G_3^{\rm T} + {S_2}}&{G_3^{\rm T} + {G_3}} \end{array}} \right]\\ {\Psi _{12}} = \, & \left[ {\begin{array}{*{20}{c}} \Psi _{s1}&\Psi _{s2} \end{array}} \right]\\ \Psi _{s1} = \, & \left[\begin{array}{cc} {{S_1}{A_1} + {{\tilde B}_1}C}&{{{\tilde A}_1}+{S_1}{B_{u1}}{\hat C_c}}\\ {{S_2}{A_1} + {{\tilde B}_1}C}&{{{\tilde A}_1}+{S_2}{B_{u1}}{\hat C_c}}\\ \end{array}\right]\\ \Psi _{s2} = \, & \left[\begin{array}{cc} {{S_1}{A_2} + {{\tilde B}_2}C}&{{{\tilde A}_2}+{S_1}{B_{u2}}{\hat C_c}}\\ {{S_2}{A_2} + {{\tilde B}_2}C}&{{{\tilde A}_2}+{S_2}{B_{u2}}{\hat C_c}}\\ \end{array}\right] \nonumber\\ {\Psi _{22}} = \, & {\rm diag}\{ { - {{ P}_{s1}}, - {{ P}_{s2}}} \}\end{aligned} \end{equation*} $$ 证明. 由引理4及引理1易证.
4. 解决方案
4.1 算法
上述定理中得到的矩阵不等式为非凸的, 为了解决该难题, 采取两步算法进行求解:
步骤1. 设计状态反馈控制器, 使闭环系统(32)满足控制性能指标(10)和(12), 得到控制器参数$ {\hat C_c} $.
设计如下形式的状态反馈控制器:
$$ \begin{equation} \pmb u(i, j) = {\hat C_c}\pmb x(i, j) \end{equation} $$ (31) 可得闭环系统:
$$ \begin{align} \pmb x(i + 1, j + 1) = \, &({A_1} + {B_{u1}}{{\hat C}_c})\pmb x(i, j + 1) +\\ & ({A_2} + {B_{u2}}{{\hat C}_c})\pmb x(i + 1, j)+\\ & {B_{d1}}\pmb d(i, j + 1) + {B_{d2}}\pmb d(i + 1, j)+\\ & {B_{f1}}\pmb f(i, j + 1) + {B_{f2}}\pmb f(i + 1, j)\\ \pmb z(i, j) = \, &(E + {F_u}{{\hat C}_c})\pmb x(i, j)+{F_f}\pmb f(i , j) \end{align} $$ (32) 定义矩阵
$$ \begin{equation*} \begin{aligned} \hat A = \, & \left[ {\begin{array}{*{20}{c}} {{A_1} + {B_{u1}}{{\hat C}_c}}&{{A_2} + {B_{u2}}{{\hat C}_c}} \end{array}} \right] = \left[ {{\hat A_{1}}, {\hat A_{2}}} \right]\\ F_f = \, &0, \hat F_f = \left[ {\begin{array}{*{20}{c}} {F_f}&0\\ 0&{F_f} \end{array}} \right] \\\hat E = \, & \left[ {\begin{array}{*{20}{c}} {E + {F_u}{{\hat C}_c}}&0\\ 0&{E + {F_u}{{\hat C}_c}} \end{array}} \right], {\hat B_f} = \left[ {{B_{f1}}, {B_{f2}}} \right]\end{aligned} \end{equation*} $$ 定理 6. 给定标量$ {\beta _1} > 0 $, $ {\bar \omega _{11}}, {\bar \omega _{12}} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {\bar P_1} $, $ {\bar P_2} $及$ {\bar Q_1}>0 $, $ {\bar Q_2}>0 $, 矩阵$ {X} $, $ {Y} $, $ {V_{i}} $, $ i = 1, \cdots , 7 $, 使不等式(31)成立, 则系统(32) $满足性能指标(10).此外, 若式(31)成立, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Phi _{11}}}&{{\Phi _{12}}}&{{\Phi _{13}}}&{{\Phi _{14}}}&{{\Phi _{15}}}&{{\Phi _{16}}}&{{\Phi _{17}}}\\ *&{{\Phi _{22}}}&{{\Phi _{23}}}&{{\Phi _{24}}}&{{\Phi _{25}}}&{{\Phi _{26}}}&{{\Phi _{27}}}\\ *&*&{{\Phi _{33}}}&{{\Phi _{34}}}&{{\Phi _{35}}}&{{\Phi _{36}}}&{{\Phi _{37}}}\\ *&*&*&{{\Phi _{44}}}&{{\Phi _{45}}}&{{\Phi _{46}}}&{{\Phi _{47}}}\\ *&*&*&*&{{\Phi _{55}}}&{{\Phi _{56}}}&{{\Phi _{57}}}\\ *&*&*&*&*&{{\Phi _{66}}}&{{\Phi _{67}}}\\ *&*&*&*&*&*&{{\Phi _{77}}} \end{array}} \right] < 0 \end{equation} $$ (33) 其中
$$ \begin{align*} {\Phi _{11}} = \, & {\bar P_1} + {\bar P_2}- {X} - X^{\rm T} , {\Phi _{12}} = {\bar Q_1}\\ {\Phi _{13}} = \, & - V_{1}^{\rm T}, {\Phi _{14}} = 0\\ {\Phi _{15}} = \, & {({A_1}{X} +{B_{f1}}{V_1}+{B_{u1}}{Y})^{\rm T}}+{\bar {Q_2}} \\ {\Phi _{16}} = \, &{({EX + {F_u}Y})^{\rm T}}, \Phi_{17} = 0, \\ {\Phi _{22}} = \, & -\bar P_1-2\cos{\bar \omega_{11}} \bar Q_1-X-X^{\rm T}\\ \Phi_{23} = \, &0, {\Phi _{24}} = - V_{5}^{\rm T}\\ {\Phi _{25}} = \, & {({A_2}{X} + {B_{f2}}{V_5} +{B_{u2}}{Y})^{\rm T}}, \Phi_{26} = 0\\ {\Phi _{27}} = \, & {({EX + {F_u}Y})^{\rm T}}, {\Phi _{33}} = I- {V_{2}} - {V_{2}}^{\rm T} \end{align*} $$ $$ \begin{align*} \Phi_{34} = \, &0, {\Phi _{35}} = -{V_{3}} + (B_{f1}V_2)^{\rm T}, \Phi_{36} = 0 \\ {\Phi _{37}} = \, & - {V_{4}}, {\Phi _{44}} = I- {V_{6}} - {V_{6}}^{\rm T}\\ {\Phi _{45}} = \, &{({B_{f2}}{V_{6}})^{\rm T}}, {\Phi _{46}} = - {V_{7}} , \Phi_{47} = 0\\ {\Phi _{55}} = \, &-\bar{P_2}-2\cos\bar{\omega}_{12}\bar{Q}_2+B_{f1}V_3+(B_{f1}V_3)^{\rm T}\\ {\Phi _{56}} = \, & {B_{f2}}{V_{7}}, {\Phi _{57}} = {B_{f1}}{V_{4}}, {\Phi _{66}} = - \beta _1^2I\\ \Phi_{67} = \, &0, {\Phi _{77}} = - \beta _1^2I \end{align*} $$ 证明. 根据广义KYP引理的对偶形式, 若下式
$$ \begin{align} &\left[ {\begin{array}{*{20}{c}} {\hat A}&{I}\\ {\hat E}&0 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} \bar P&\bar Q\\ *&\bar \Delta \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\hat A}&{I}\\ {\hat E}&0 \end{array}} \right]^{\rm T}+\\ & \qquad \left[ {\begin{array}{*{20}{c}} {\hat B_f}&{0}\\ {\hat F_f}&I \end{array}} \right]\left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\beta _1}^2I} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\hat B_f}&{0}\\ {\hat F_f}&I \end{array}} \right]^{\rm T}<0 \end{align} $$ (34) 成立, 则系统(32)满足性能指标(10).式(34)可写为
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right] K \left[ {\begin{array}{*{20}{c}} {{\Sigma _1}}&0\\ 0&{{\Pi _1}} \end{array}} \right]{K ^{\rm T}}{\left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right]^{\rm T}} < 0 \end{equation} $$ (35) 其中
$$ \begin{equation*} \begin{aligned} K = \, &\left[{\begin{array}{*{20}{c}} I&0&0&0&0&0&0\\ 0&I&0&0&0&0&0\\ 0&0&0&I&0&0&0\\ 0&0&0&0&I&0&0\\ 0&0&I&0&0&0&0\\ 0&0&0&0&0&I&0\\ 0&0&0&0&0&0&I \end{array}} \right]\\ \Sigma_1 = \, &\left[ {\begin{array}{*{20}{c}} \bar P&\bar Q\\ *&\bar \Delta \end{array}} \right], \Pi_1 = \left[ {\begin{array}{*{20}{c}} { I}&0\\ 0&{{-\beta _1}^2I} \end{array}} \right]\\ S = \, &\left[ {\begin{array}{*{20}{c}} {\hat A}&{{{\hat B}_f}}\\ {\hat E}&{0} \end{array}} \right] = \\ \, & \left[ {\begin{array}{*{20}{c}} {A_1}&{A_{2}}&{B_{f1}}&{B_f}\\E&0&0&0\\0&E&0&0 \end{array}} \right]+\\ &\left[ {\begin{array}{*{20}{c}} {B_{u1}}&{B_{u2}}\\{F_{u}}&{0}\\0&{F_u} \end{array}} \right] \left[ {\begin{array}{*{20}{c}} {\hat C_c}&{0}\\{0}&{\hat C_c} \end{array}} \right] \left[ {\begin{array}{*{20}{c}} I&0&0&0\\0&I&0&0 \end{array}} \right] = \\ \, &\mathscr{A}+\mathscr{B}L\mathscr{C}\end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} {X_1} = {\{{\mathscr{C}}^\dagger XR+(I-{\mathscr{C}^ \dagger}\mathscr{C})V\} } , \quad Y = {\hat C_c}X \end{aligned} \end{equation*} $$ 则
$$ \begin{equation*} \begin{aligned} SX_1 = \mathscr{A}X_1+\mathscr{B}YR \end{aligned} \end{equation*} $$ 由于$ \mathscr{C} = \left[ {\begin{array}{*{20}{c}} I&0&0&0\\0&I&0&0 \end{array}} \right] $, 故$ \mathscr{C}^\dagger = \left[ {\begin{array}{*{20}{c}} I&0\\0&I\\0&0\\0&0 \end{array}} \right] $, 因此可得
$$ \begin{equation*} \begin{aligned} {X_1} = \, &\left[ {\begin{array}{*{20}{c}} {XR_1}\\ {XR_2} \\{ V_a}\\{ V_b} \end{array}} \right] \end{aligned} \end{equation*} $$ 令$ {P_1} = K \left[ {\begin{array}{*{20}{c}} {{\Sigma _1}}&0\\ 0&{{\Pi _1}} \end{array}} \right]{K ^{\rm T}}, H_1 = \begin{bmatrix} -I\\S \end{bmatrix}, $ $ H_1^ \bot = \left[ {\begin{array}{*{20}{c}} S&I \end{array}} \right] $, 式(35)可改写为
$$ \begin{equation*} {P_1} + He({H_1}{X_1}) < 0 \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} {R_1} = \, & \left[ {\begin{array}{*{20}{c}} I&0&0&0&0&0&0 \end{array}} \right]\\ {R_2} = \, &\left[ {\begin{array}{*{20}{c}} 0&I&0&0&0&0&0 \end{array}} \right]\\ V_a = \, &\begin{bmatrix} V_1&0&V_2&0&V_3&0&V_4 \end{bmatrix}\\ V_b = \, &\begin{bmatrix} 0&V_5&0&V_6&0&V_7&0 \end{bmatrix} \end{aligned} \end{equation*} $$ 代入可得式(33).此外, 若式(33)成立, 易知$ X $可逆, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
定理 7. 给定标量$ {\beta _2} > 0 $, $ {\bar \omega _{21}}, {\bar \omega _{22}} \in \left[ {0, \pi } \right] $, 如果存在对称矩阵$ {\tilde P_1} $, $ {\tilde P_2} $及$ {\tilde Q_1}>0 $, $ {\tilde Q_2}>0 $, 矩阵$ {X} $, $ {Y} $, $ {V_{i}} $, $ i = 1, \cdots , 7 $, 使不等式(36)成立, 则系统(32) $满足性能指标(12).此外, 若式(36)成立, 则状态反馈控制器$ {\hat C_c} = YX^{-1} $.
$$ \begin{equation} \left[ {\begin{array}{*{20}{c}} {{\Sigma _{11}}}&{{\Sigma _{12}}}&{{\Phi _{13}}}&{{\Sigma _{14}}}&{{\Sigma _{15}}}&{{\Phi _{16}}}&{{\Phi _{17}}}\\ *&{{\Sigma _{22}}}&{{\Phi _{23}}}&{{\Phi _{24}}}&{{\Sigma _{25}}}&{{\Phi _{26}}}&{{\Phi _{27}}}\\ *&*&{{\Phi _{33}}}&{{\Phi_{34}}}&{{\Sigma _{35}}}&{{\Phi _{36}}}&{{\Phi _{37}}}\\ *&*&*&{{\Sigma _{44}}}&{{\Sigma _{45}}}&{{\Phi _{46}}}&{{\Phi _{47}}}\\ *&*&*&*&{{\Sigma _{55}}}&{{\Sigma _{56}}}&{{\Sigma _{57}}}\\ *&*&*&*&*&{{\Sigma _{66}}}&{{\Phi _{67}}}\\ *&*&*&*&*&*&{{\Sigma _{77}}} \end{array}} \right] < 0 \end{equation} $$ (36) 其中
$$ \begin{equation*} \begin{aligned} {\Sigma _{11}} = \, & {\tilde P_1} + {\tilde P_2}- {X} - X^{\rm T} , {\Sigma _{12}} = {\tilde Q_1}\\ {\Sigma _{14}} = \, &0 \\ {\Sigma _{15}} = \, & {({A_1}{X} +{B_{d1}}{V_1}+{B_{u1}}{Y})^{\rm T}}+{\tilde {Q_2}}\\ {\Sigma _{22}} = \, & -{\tilde P_1} -2\cos {\bar \omega _{21}}{\tilde Q_1}- {X} - X^{\rm T} \\ {\Sigma _{25}} = \, & {({A_2}{X} + {B_{d2}}{V_5} +{B_{u2}}{Y})^{\rm T}}\\ {\Sigma _{35}} = \, & -{V_{3}} + ({B_{d1}}{V_2})^{\rm T}\\ {\Sigma _{44}} = \, & I- {V_{6}} - {V_{6}}^{\rm T}\\ {\Sigma _{45}} = \, &{({B_{d2}}{V_{6}})^{\rm T}} \\ {\Sigma _{55}} = \, &-\tilde{P_2}-2\cos\bar{\omega}_{22}\tilde{Q}_2+B_{d1}V_3+(B_{d1}V_3)^{\rm T} \\ {\Sigma _{56}} = \, & {B_{d2}}{V_{7}}, {\Sigma _{57}} = {B_{d1}}{V_{4}}, {\Sigma _{66}} = - \beta _2^2I, {\Sigma _{77}} = - \beta _2^2I \end{aligned} \end{equation*} $$ 证明. 参考定理6证明过程.
通过求解以下优化问题获得控制器参数$ {\hat C_c} $:
$$ \begin{equation*} \begin{aligned} &\min a{\beta _1} + b{\beta _2}\\ &{\rm s.t.}\;\;(33), (36) \end{aligned} \end{equation*} $$ (37) 给定实参数$ a $, $ b $, 若上述优化问题可解, 则控制器参数$ {\hat C_c} = YX^{-1} $.
步骤2. 在步骤1的基础上($ {\hat C_c} $已知), 给定实参数$ {a_1} $, $ {a_2} $, $ {b_1} $, $ {b_2} $, 求解如下的优化问题:
$$ \begin{equation*} \begin{aligned} & \min {a_2}{\gamma _2} + {b_1}{\beta _1} + {b_2}{\beta _2} - {a_1}{\gamma _1}\\ &{\rm s.t.}\;(18), (19), (20), (25), (28), (29), (30) \end{aligned} \end{equation*} $$ 若上述优化问题可解, 则可得滤波器参数$ \hat A_k = G_3^{-1}\tilde A_k, \hat B_k = G_3^{-1}\tilde B_k, k = 1, 2, {\hat C_0} = {\hat C_0} $.
注5. 与一维系统相比, 二维系统的稳定性条件和性能条件复杂, 其故障检测滤波器/控制器的设计过程更加困难.求解有限频$ {H_ - } $指标时, 一维系统可通过Finsler定理等避免出现非凸问题, 而二维系统由于其广义KYP引理的特殊形式, 需要通过构造切平面方法来解决设计过程中出现的非凸问题.二维系统的状态反馈控制器设计难度也更大, 需利用广义KYP引理的对偶形式进行构造性证明.
4.2 残差评价函数及阈值
受参考文献[29]启发, 选择如下残差评价函数及阈值:
$$ \begin{equation} \begin{aligned} {J_r}(i, j)& = \sqrt{\frac{{\sum\limits_{p = 0}^s {\sum\limits_{q = 0}^t {{r^{\rm T}}}(i-p, j-q)r(i-p, j-q)}}}{{(s+1)(t+1)}}}\\ {J_{th}}& = \mathop{\sup}\limits_{f = 0, d \ne 0} {J_r}(i, j) \end{aligned} \end{equation} $$ (38) 其中, $ {J_r}(i, j) $和$ {J_{th}} $分别表示残差函数及阈值.阈值$ {J_{th}} $可借鉴文献[30]中的算法求出.根据如下的逻辑关系检测系统是否发生了故障:
$$ \begin{array}{l} J\left( {i,j} \right) > {J_{th}} \Rightarrow 系统存在故障 \Rightarrow 报警\\ J\left( {i,j} \right) < {J_{th}} \Rightarrow 系统无故障 \Rightarrow 不报警 \end{array} $$ 注6. 对于二维系统而言, 残差评价函数需要从水平和垂直两个方向定义以反映二维特性.本文选择水平方向$ i-s $到$ i $, 垂直方向$ j-t $$到$ j $的矩形区域内残差的平均值作为评价函数.而对于一维系统, 残差评价函数只需要在一个方向上定义, 其评估窗口通常为$ k_0 $到$ k_0+n $的时间范围.
5. 仿真例子
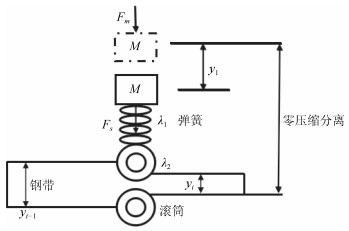
该轧制过程可用如下等式描述:
$$ \begin{equation*} \begin{aligned} \pmb y_{i}(t) = {\frac{\lambda}{\lambda +Mp^2}}\left\{\left(1+\frac{Mp^2}{\lambda_1}\right)\pmb y_{i-1}(t)-{\frac{1}{\lambda_2}}\pmb F_m\right\} \end{aligned} \end{equation*} $$ 其中, $ p $表示微分算子$ {\rm d}/{\rm d}t $, $ \pmb y_i(t) $是第$ i $个实际压辊间隙厚度, $ \pmb F_m $是由电动机产生的力, $ M $是压辊间隙调节机构的总质量, $ \lambda_1 $表示调节机构弹簧, $ \lambda_2 $表示带钢的硬度, $ \lambda = \lambda_1\lambda_2/(\lambda_1+\lambda_2) $是带钢和压辊机构的复合刚度.通过向后差分并用$ T_1 $表示采样周期, 则上式可以用离散时间形式表示:
$$ \begin{equation*} \begin{aligned} \pmb y_i(t+T_1) = \, & c_1\pmb y_i(t)+c_2\pmb y_i(t-T_1)+c_3\pmb y_{i-1}(t+T_1)+\\ & c_4\pmb y_{i-1}(t)+c_5\pmb y_{i-1}(t-T_1)+b \pmb u_{i}(t)\end{aligned} \end{equation*} $$ 令
$$ \begin{equation*} \begin{aligned} c_1 = \, &\frac{2M}{\lambda {T_1}^2+M}, \; c_2 = \frac{-M}{\lambda {T_1}^2+M}\\ c_3 = \, & \frac{\lambda}{\lambda {T_1}^2+M}\left({T_1}^2+\frac{M}{\lambda }\right)\\ c_4 = \, & -\frac{2\lambda M}{\lambda_1(\lambda{T_1}^2+M)}, \; c_5 = \frac{\lambda M}{\lambda_1(\lambda{T_1}^2+M)}\\ b = \, & -\frac{\lambda {T_1}^2}{\lambda_2(\lambda{T_1}^2+M)}\\ \pmb x(i, j): = \, &[\pmb y_{i-1}^{\rm T}((j+1)T_1)\quad \pmb y_{i-1}^{\rm T}(jT_1)\quad \pmb y_{i}^{\rm T}(jT_1)\\ &\pmb y_{i}^{\rm T}((j-1)T_1)\quad \pmb y_{i-1}^{\rm T}((j-1)T_1)]^{\rm T}\\ \pmb u(i, j): = \, &\pmb F_m, \; \pmb y(i, j): = \pmb y_i(jT_1) \end{aligned} \end{equation*} $$ 上述等式可转化为FM模型:
$$ \begin{equation*} \begin{split} {\pmb x}({ i} + 1, { j} + 1) = \, &A_1{\pmb x}({ i}, { j} + 1) + A_2{\pmb x}({ i} + 1, { j})+\\ & B_{{ d}1}{\pmb d}({ i}, { j} + 1) + B_{{ d}2}{\pmb d}({ i} + 1, { j})+\\ & B_{{ u}1}{\pmb u}({ i}, j + 1) + B_{u2}{\pmb u}({ i}+1, j) +\\ & B_{{ f}1}{\pmb f}({ i}, j + 1) + B_{{ f}2}{\pmb f}({ i} + 1, { j})\\ \pmb y({ i}, { j}) = \, & C{\pmb x}({ i}, { j}) + D_{ d}{\pmb d}({ i}, { j}) + D_{ f}{\pmb f}({ i}, { j})\\ \pmb z({ i}, { j}) = \, & E{\pmb x}({ i}, { j}) + F_{ u} {\pmb u}({ i}, { j}) \end{split} \end{equation*} $$ 其中
$$ \begin{align*} {A_1}& = \left[ {\begin{array}{*{20}{c}} {c_3}&{c_4}&{c_1}&{c_2}&{c_5}\\ 0&0&1&0&0\\0&0&0&0&0\\0&0&0&0&0\\0&0&0&0&0 \end{array}} \right]\\{A_2}& = \left[ {\begin{array}{*{20}{c}} 0&0&0&0&0\\0&0&0&0&0\\{c_3}&{c_4}&{c_1}&{c_2}&{c_5}\\0&0&1&0&0\\0&1&0&0&0 \end{array}} \right]\\ {B_{d1}}& = \left[ {\begin{array}{*{20}{c}} 0.0605\\0.3993\\0.5269\\0.4168\\0.6569 \end{array}} \right], {B_{d2}} = \left[ {\begin{array}{*{20}{c}} 0.6280\\0.2920\\0.4317\\0.0155\\0.9841 \end{array}} \right] \end{align*} $$ $$ \begin{align*} {B_{u1}}& = \left[ {\begin{array}{*{20}{c}} b\\0\\0\\0\\0 \end{array}} \right], {B_{u2}} = \left[ {\begin{array}{*{20}{c}} 0\\0\\b\\0\\0 \end{array}} \right]\\ B_{f1}& = \begin{bmatrix} -1.0414&0&0&0&0 \end{bmatrix}^{\rm T}\\B_{f2}& = \begin{bmatrix} 0&0&-1.0414&0&0 \end{bmatrix}^{\rm T}\\ C& = \begin{bmatrix} 0&0&0&0&0 \end{bmatrix}\\ E& = \left[ {\begin{array}{*{20}{c}} 0&0&{1}&0&0 \end{array}} \right]\\ F_u& = 0.1672, D_f = 1.2, D_d = 0.5 \end{align*} $$ 令$ \lambda_1 = \lambda_2 = 1\, 800, T_1 = 0.8, M = 100 $, 假设上述系统中发生了卡死型传感器故障.利用本文所提出的方法设计故障检测滤波器/控制器, 同时保证一定的故障检测性能和控制性能.给定加权值$ {a_1} = 0.1 $, $ {a_2} = 0.4 $, $ {b_1} = 0.4 $, $ {b_2} = 0.1 $, 由于故障发生在低频段, 取频率约束$ {\bar \omega _{k1}} = {\bar \omega _{k2}} = \pi /12, k = 1, 2 $, 其余参数取为$ T = \left[ {\begin{array}{*{20}{c}} 0.8147&0.9058&0.1270&0.9134&0.6324 \end{array}} \right]^{\rm T} $, $ \alpha = 1.6537 $.根据上节所提出的算法, 可得如下故障检测滤波器/控制器参数:
$$ \begin{equation*} \begin{aligned} {\hat A_1} = \, & \left[ {\begin{array}{*{20}{c}} -0.0673&-0.0120&0.0238&-0.0189&0.0103\\ -0.0064&-0.1977&0.0372&0.0114&0.0109\\ 0.0065&0.0130&-0.1643&0.0184&0.0082\\ -0.0037&0.0061&0.0135&-0.1931&0.0030\\ -0.0196&0.0166&0.0128&0.0091&-0.1854\\ \end{array}} \right]\\ {\hat A_2} = \, & \left[ {\begin{array}{*{20}{c}} -0.1618&0&0.0071&-0.0030&0.0026\\ 0.0097&-0.1998&0.0160&0.0041&0.0088\\ 0.0601&0.0040&-0.1529 & 0 & 0.0137\\ 0.0099&0.0047&0.0384&-0.2012&0.0050\\ -0.0148&0.0316&0.0103&0.0077&-0.1892 \end{array}} \right]\\ {\hat B_1} = \, & \left[ {\begin{array}{*{20}{c}} 0.3024\\ -0.0514\\ 0.0357\\ -0.0827\\ -0.0437 \end{array}} \right], {\hat B_2} = \left[ {\begin{array}{*{20}{c}} -0.1311\\ 0.0634\\ 0.2529\\ 0.0884\\ -0.0510 \end{array}} \right] \end{aligned} \end{equation*} $$ $$ \begin{equation*} \begin{aligned} {\hat C_c} = \, & \left[ {\begin{array}{*{20}{c}} 556.2519&-81.8249&86.8303&-88.8581&44.4291 \end{array}} \right]\\ {\hat C_0} = \, &\left[ {\begin{array}{*{20}{c}} 1.0215&1.1350&0.1381&1.1477&0.7935 \end{array}} \right] \end{aligned} \end{equation*} $$ 为了验证该故障检测滤波器/控制器的有效性, 给出仿真结果(图 1~4).在仿真中, 考虑卡死型故障
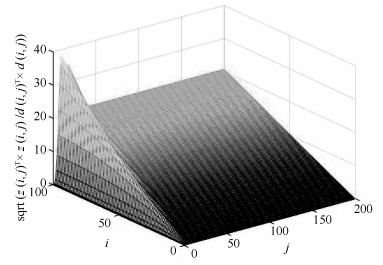
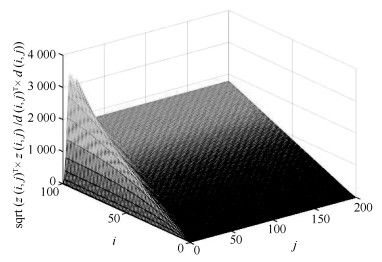
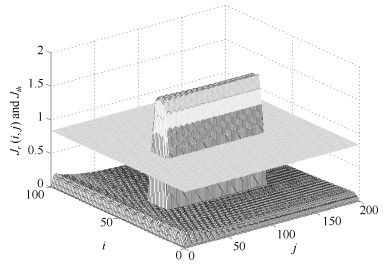 图 4 三维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 4 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in three-dimensional space
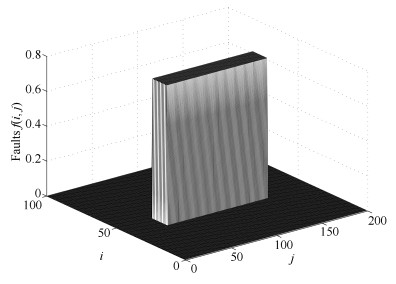
图 4 三维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 4 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in three-dimensional space$$ \begin{equation*} \pmb f(i, j) = \begin{cases} 0.8, &40 \le i \le 50, 40 \le j \le 150\\ 0, & \mbox{否则} \end{cases} \end{equation*} $$ 以及干扰
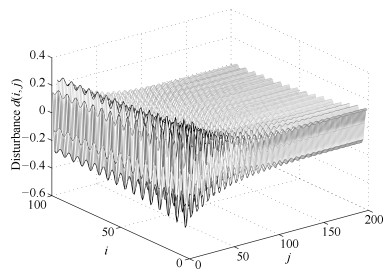
$$ \begin{equation*} \pmb d(i, j) = 0.15{\sin}(i){\rm e}^{-0.02i}+0.3{\cos}(j){\rm e}^{-0.03j} \end{equation*} $$ 系统初始状态设为$ {{\pmb x}_i}(k, 1) = 0 $, $ {\hat {\pmb x}_i}(k, 1) = 0 $, $ {\pmb x_i}(1, k) = 0 $, $ {\hat {\pmb x}_i}(1, k) = 0 $.采用参考文献[30]中的算法, 可得阈值$ {J_{th}} = 0.8251 $. 图 2表示系统的故障, 图 3表示系统干扰, 图 4和图 5分别给出了三维空间和二维空间的故障检测效果.从图 5可以看出, 当$ i = 15, 23, 35 $时, 残差评价函数的值位于阈值的下方, 表明系统没有发生故障; 当$ i = 44 $, $ 40 \le j\le150 $时, 残差评价函数的值位于阈值的上方, 表明此时系统发生了故障, 这与预设的故障一致, 因此该设计可以有效地检测出故障发生.
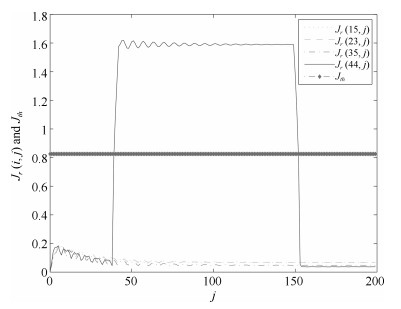 图 5 二维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 5 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in two-dimensional space
图 5 二维空间中的残差评价函数$ {J_r}(i, j)$和阈值$ {J_{th}}$Fig. 5 Residual evalution function $ {J_r}(i, j)$ and threshold $ {J_{th}}$ in two-dimensional space接下来与传统的分步设计方法[15]进行比较, 仍采用上文中的轧制模型中的数据, 先设计控制器, 再设计故障检测滤波器.在相同条件下进行仿真研究, 仿真结果如图 6~8所示. 图 6为故障到残差传递函数的奇异值比较, 可以看出集成设计方法的故障灵敏性更高(奇异值更大). 图 7和图 8为两种方法的控制性能(即扰动抑制性能)的比较, 可以看出当故障发生时, 本文所提出的集成设计方法具有更好的扰动抑制能力.
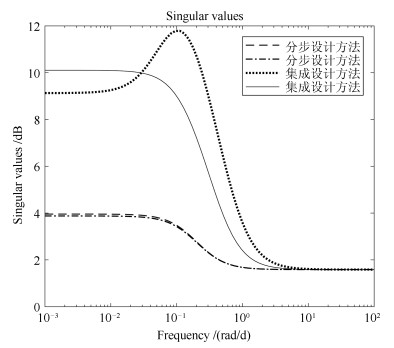 图 6 故障到残差传递函数${G_{\tilde yf}}({\omega _1}, {\omega _2})$的奇异值比较Fig. 6 Singular value comparison of transfer functions ${G_{\tilde yf}}({\omega _1}, {\omega _2})$ from fault to residual signal
图 6 故障到残差传递函数${G_{\tilde yf}}({\omega _1}, {\omega _2})$的奇异值比较Fig. 6 Singular value comparison of transfer functions ${G_{\tilde yf}}({\omega _1}, {\omega _2})$ from fault to residual signal6. 结论
本文研究了FM模型的同时故障检测与控制问题.借助于二维广义KYP引理, 直接处理系统需要满足的有限频性能指标, 可避免频率加权方法的复杂性.所设计的故障检测滤波器/控制器, 在检测故障发生的同时, 还可以满足给定的控制性能指标.利用构造切平面方法以及两步法来解决设计过程中出现的非凸问题.仿真例子验证了方法的有效性.
-
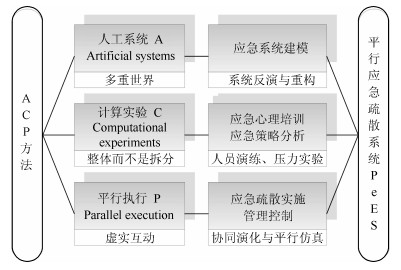
图 4 基于ACP方法的平行应急疏散系统框架设计思路
Fig. 4 The design idea of ACP-based parallel emergency evacuation systems
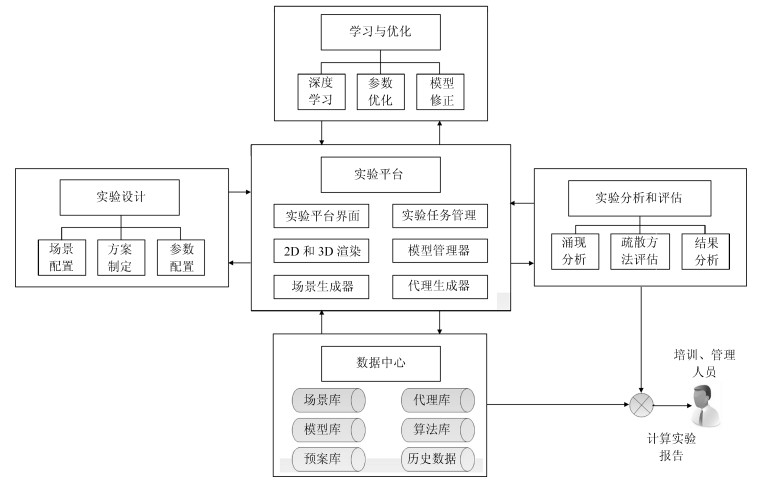
图 7 平行应急疏散系统计算实验框架
Fig. 7 Framework of computational experiments in parallel emergency evacuation systems

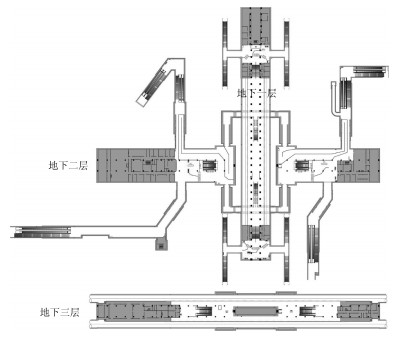
图 9 轨道交通枢纽站平行应急疏散系统平台:硬件配置(左)和软件平台界面(右)
Fig. 9 Platform of parallel emergency evacuation systems (PeES) for rail transportation hub stations: hardware configurations (left) and the interface of software platform (right)
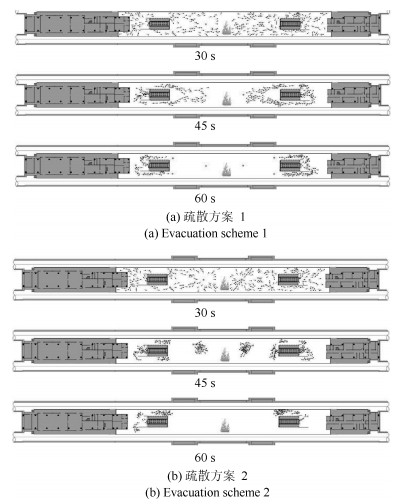
图 11 疏散开始30 s, 45 s和60 s时2种不同方案下站台乘客疏散快照
Fig. 11 The snapshots of passenger evacuation under different evacuation strategies at the time of 30 s, 45 s and 60 s
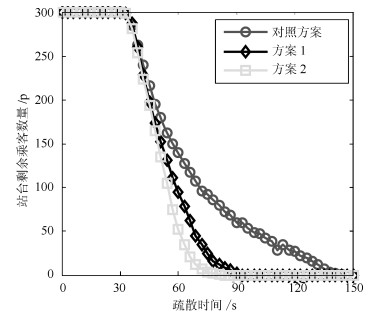
图 12 站台剩余乘客数与疏散时间的关系
Fig. 12 Number of passengers in the subway platform against evacuation time under different evacuation strategies
表 1 人员Agent模型默认属性值
Table 1 Default values of individual agent's characteristics
参数 属性 默认值 $m_i$ 质量 80 kg $r_i$ 半径 0.3 m $\tau_i$ 弛豫时间 0.5 s $A_i$ 回避力强度 2 000 N $B_i$ 回避因子 0.08 m $\kappa$ 滑动摩擦因子 $2.4 \times 10^5 {\rm kgm}^{-1} {\rm s}^{-1}$ $k$ 身体压缩因子 $1.2 \times 10^5 {\rm kgm}^{-1}s^{-1}$ $v_i^0$ 期望速度 N$(1.34, 0.26) {\rm ms}^{-1}$ $R_{inf}$ 影响半径 11 m $R_{vf}$ 视野半径 10 m $\beta_i$ 愿意跟随程度 1 $a_i$ 引导信息可得度 1 $b_1$ 位置反馈因子 0.05 $b_2$ 速度反馈因子 0.05 $\lambda _i$ 各向异性 0.5  下载: 导出CSV
下载: 导出CSV
表 2 乘客应急疏散计算实验结果(s)
Table 2 Experimental results of passenger emergency evacuation (s)
对照方案 方案1 方案2 单次疏散时间 146 87 81 平均疏散时间 143.2 92.5 80.8 标准差 28.4 8.2 5.5
下载: 导出CSV
-
[1] 闪淳昌.建立健全突发事件应急预案.中国减灾, 2004, (6):15-16 http://d.old.wanfangdata.com.cn/Periodical/zgjz200406007Shan Chun-Chang. Establish a sound emergency response plan. Disaster Reduction in China, 2004, (6):15-16 http://d.old.wanfangdata.com.cn/Periodical/zgjz200406007 [2] 曹杰, 杨晓光, 汪寿阳.突发公共事件应急管理研究中的重要科学问题, 公共管理学报, 2007, (4):84-85 http://d.old.wanfangdata.com.cn/Periodical/ggglxb200702012Cao Jie, Yang Xiao-Guang, Wang Shou-Yang. Important scientific issues in the research of public emergency management. Journal of Public Management, 2007, (4):84-85 http://d.old.wanfangdata.com.cn/Periodical/ggglxb200702012 [3] 范维澄.国家突发公共事件应急管理中科学问题的思考和建议.中国科学基金, 2007, (2):71-76 doi: 10.3969/j.issn.1000-8217.2007.02.003Fan Wei-Cheng. Advisement and suggestion to scientific problems of emergency management for public incidents. Bulletin of National Natural Science Foundation of China, 2007, (2):71-76 doi: 10.3969/j.issn.1000-8217.2007.02.003 [4] 杨列勋, 邓云峰.国家突发公共事件应急管理中的科学问题.自然科学进展, 2007, 17(4):505 doi: 10.3321/j.issn:1002-008X.2007.04.024Yang Lie-Xun, Deng Yun-Feng. Scientific problems of emergency management. Progress in Natural Science, 2007, 17(4):505 doi: 10.3321/j.issn:1002-008X.2007.04.024 [5] 计雷, 池宏, 陈安, 陈建明, 赵红.突发事件应急管理.北京:高等教育出版社, 2006Ji Lei, Chi Hong, Chen An, Chen Jian-Ming, Zhao Hong. Emergency management. Beijing:Higher Education Press, 2006 [6] 何建敏, 刘春林.应急管理与应急系统.北京:科学出版社, 2005He Jian-Min, Liu Chun-Lin. Emergency management and emergency systems. Beijing:Sciences Press, 2005 [7] Tan L, Hu M Y, Lin H. Agent-based simulation of building evacuation:Combining human behavior with predictable spatial accessibility in a fire emergency. Information Sciences, 2015, (295):53-66 [8] Zhou M, Dong H R, Wen D, Yao X M, Sun X B. Modeling of crowd evacuation with assailants via a fuzzy logic approach. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(9):2395-2407 doi: 10.1109/TITS.2016.2521783 [9] Zhang H, Liu H, Qin X, Liu B X. Modified two-layer social force model for emergency earthquake evacuation. Physica A:Statistical Mechanics and its Applications, 2018, (492):1107-1119 http://cn.bing.com/academic/profile?id=b1c4233af886f769e5c30abbd20a8bcb&encoded=0&v=paper_preview&mkt=zh-cn [10] 王飞跃.关于复杂系统研究的计算理论与方法.中国基础科学, 2004, 6(5):3-10 doi: 10.3969/j.issn.1009-2412.2004.05.001Wang Fei-Yue. Computational theory and method on complex system. China Basic Science, 2004, 6(5):3-10 doi: 10.3969/j.issn.1009-2412.2004.05.001 [11] 王飞跃.平行系统方法与复杂系统的管理和控制.控制与决策, 2004, 19(5):485-489, 514 doi: 10.3321/j.issn:1001-0920.2004.05.002Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5):485-489, 514 doi: 10.3321/j.issn:1001-0920.2004.05.002 [12] 王飞跃.计算实验方法与复杂系统行为分析和决策评估.系统仿真学报, 2004, 16(5):893-897 doi: 10.3969/j.issn.1004-731X.2004.05.009Wang Fei-Yue. Computational experiments for behavior analysis and decision evaluation of complex systems. Journal of System Simulation, 2004, 16(5):893-897 doi: 10.3969/j.issn.1004-731X.2004.05.009 [13] 王飞跃.人工社会、计算实验、平行系统——关于复杂社会经济系统计算研究的讨论.复杂系统与复杂性科学, 2004, 1(4):25-35 doi: 10.3969/j.issn.1672-3813.2004.04.002Wang Fei-Yue. Artificial societies, computational experiments, and parallel systems:a discussion on computational theory of complex social-economic systems. Complex Systems and Complexity Science, 2004, 1(4):25-35 doi: 10.3969/j.issn.1672-3813.2004.04.002 [14] Wang F Y. Parallel control and management for intelligent transportation systems:concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3):630-638 doi: 10.1109/TITS.2010.2060218 [15] Lv Y S, Zhang X Q, Kang W W, Duan Y J. Managing Emergency Traffic evacuation with a partially random destination allocation strategy:a computational-experiment-based optimization approach. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4):2182-2191 doi: 10.1109/TITS.2015.2399852 [16] Ning B, Tang T, Dong H R, Wen D, Liu D R. An introduction to parallel control and management for high-speed railway systems. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4):1473-1483 doi: 10.1109/TITS.2011.2159789 [17] Dong H R, Ouyang R H, Ning B, Chen G R. Parallel experiment for urban rail emergency evacuation:An approach for hub identification. IEEE Intelligent Systems, 2013, 28(4):52-59 doi: 10.1109/MIS.2013.55 [18] 王飞跃, 王晓, 袁勇, 王涛, 林懿伦.社会计算与计算社会:智慧社会的基础与必然.科学通报, 2015, 60(5-6):460-469 http://www.cnki.com.cn/Article/CJFDTOTAL-KXTB2015Z1008.htmWang Fei-Yue, Wang Xiao, Yuan Yong, Wang Tao, Lin Yi-Lun. Social computing and computational societies:The foundation and consequence of smart societies. Chinese Science Bulletin, 2015, 60(5-6):460-469 http://www.cnki.com.cn/Article/CJFDTOTAL-KXTB2015Z1008.htm [19] 王飞跃, 张梅, 孟祥冰, 王蓉, 王晓, 张志成, 等.平行手术:基于ACP的智能手术计算方法.模式识别与人工智能, 2017, 30(11):961-970 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn201711001Wang Fei-Yue, Zhang Mei, Meng Xiang-Bing, Wang Rong, Wang Xiao, Zhang Zhi-Cheng, et al. Parallel surgery:an acp-based approach for intelligent operations. Pattern Recognition And Artificial Intelligence, 2017, 30(11):961-970 http://d.old.wanfangdata.com.cn/Periodical/mssbyrgzn201711001 [20] Duan W, Cao Z D, Wang Y Z, Zhu B, Zeng D, Wang F Y, et. al. An ACP approach to public health emergency management:using a campus outbreak of H1N1 influenza as a case study. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2013, 43(5):1028-1041 doi: 10.1109/TSMC.2013.2256855 [21] 袁勇, 王飞跃.平行区块链:概念, 方法与内涵解析.自动化学报, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtmlYuan Yong, Wang Fei-Yue. Parallel Blockchain:Concept, Methods and Issues. Acta Automatica Sinica, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtml [22] 袁勇, 王飞跃.区块链技术发展现状与展望.自动化学报, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtmlYuan Yong, Wang Fei-Yue. Blockchain:The State of the Art and Future Trends. Acta Automatica Sinica, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtml [23] 袁勇, 倪晓春, 曾帅, 王飞跃.区块链共识算法的发展现状与展望.自动化学报, 2018, 44(11):2011-2022 http://www.aas.net.cn/CN/abstract/abstract19383.shtmlYuan Yong, Ni Xiao-Chun, Zeng Shuai, Wang Fei-Yue. Blockchain Consensus Algorithms:The State of the Art and Future Trends. Acta Automatica Sinica, 2018, 44(11):2011-2022 http://www.aas.net.cn/CN/abstract/abstract19383.shtml [24] 王飞跃.平行应急管理系统PeMS的体系框架及其应用研究.中国应急管理, 2007, (12):22-28 http://www.cnki.com.cn/Article/CJFDTotal-YIGU200712009.htmWang Fei-Yue. PeMS:parallel execution-based emergency management system. China Emergence Management, 2007, (12):22-28 http://www.cnki.com.cn/Article/CJFDTotal-YIGU200712009.htm [25] 王飞跃, 邱晓刚, 曾大军, 曹志冬, 樊宗臣.基于平行系统的非常规突发事件计算实验平台研究.复杂系统与复杂性科学, 2010, 7(4):1-10 doi: 10.3969/j.issn.1672-3813.2010.04.001Wang Fei-Yue, Qiu Xiao-Gang, Zeng Da-Jun, Cao Zhi-Dong, Fan Zong-Chen. A computational experimental platform for emergency response based on parallel systems. Complex Systems and Complexity Science, 2010, 7(4):1-10 doi: 10.3969/j.issn.1672-3813.2010.04.001 [26] 孙绪彬, 董海荣, 宁滨, 高童欣, 孔庆杰.基于ACP方法的应急疏散系统研究.自动化学报, 2014, 40(1):16-23 http://www.aas.net.cn/CN/abstract/abstract18262.shtmlSun Xu-Bin, Dong Hai-Rong, Ning Bin, Gao Tong-Xin, Kong Qing-Jie. ACP-based emergency evacuation system. Acta Automatica Sinica, 2014, 40(1):16-23 http://www.aas.net.cn/CN/abstract/abstract18262.shtml [27] 胡玉玲, 王飞跃, 刘希未.基于ACP方法的高层建筑火灾中人员疏散策略研究.自动化学报, 2014, 40(2):185-196 http://www.aas.net.cn/CN/abstract/abstract18281.shtmlHu Yu-Ling, Wang Fei-Yue, Liu Xi-Wei. ACP-based Research on evacuation strategies for high-rise building fire. Acta Automatica Sinica, 2014, 40(2):185-196 http://www.aas.net.cn/CN/abstract/abstract18281.shtml [28] 伦淑娴. ACP理论的平行执行方式分类研究.自动化学报, 2012, 38(10):1602-1608 http://www.aas.net.cn/CN/abstract/abstract17769.shtmlLun Shu-Xian. Research on the classification of parallel execution mode of ACP theory. Acta Automatica Sinica, 2012, 38(10):1602-1608 http://www.aas.net.cn/CN/abstract/abstract17769.shtml [29] Helbing D, Farkas I, Vicsek T. Simulating dynamical features of escape panic. Nature, 2000, 470(6803):487-490 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_cond-mat%2f0302021 [30] Liu Q. A social force model for the crowd evacuation in a terrorist attack. Physica A:Statistical Mechanics and its Applications, 2018, (502):315-330 http://cn.bing.com/academic/profile?id=b04dcd0c904c5a346876064f23c723d4&encoded=0&v=paper_preview&mkt=zh-cn [31] Burstedde C, Klauck K, Schadschneider A, Zittartz J. Simulation of pedestrian dynamics using a two-dimensional cellular automaton. Physica A:Statistical Mechanics and its Applications, 2001, 295(3):507-525 http://cn.bing.com/academic/profile?id=cd307f24774cb6ca1fd8e70b0c90dbcc&encoded=0&v=paper_preview&mkt=zh-cn [32] Lu L, Chan C Y, Wang J, Wang W. A study of pedestrian group behaviors in crowd evacuation based on an extended floor field cellular automaton model. Transportation Research, Part C:Emerging Technologies, 2017, (81):317-329 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=77ec70d9c774f5ecd9feb8781bc14cfe [33] Antonini G, Bierlaire M, Weber M. Discrete choice models of pedestrian walking behavior. Transportation Research Part B:Methodological, 2006, 40(8):667-687 doi: 10.1016/j.trb.2005.09.006 [34] Zhou M, Dong H R, Wang F Y, Wang Q L, Yang X X. Modeling and simulation of pedestrian dynamical behavior based on a fuzzy logic approach. Information Sciences, 2016, (360):112-130 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7e894635d1d4c0d3a64c56f991fccb3f [35] Zhou M, Dong H R, Wen D, Yao X M, Sun X B. Modeling of crowd evacuation with assailants via a fuzzy logic approach. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(9):2395-2407 doi: 10.1109/TITS.2016.2521783 [36] Wang Q L, Dong H R, Ning B, Wang L Y, Yin G, Two-time-scale hybrid traffic models for pedestrian crowds. IEEE Transactions on Intelligent Transportation Systems, 2018, 17(11):3449-3460 http://cn.bing.com/academic/profile?id=a1157369a8277a70baa2e68edb626ba2&encoded=0&v=paper_preview&mkt=zh-cn [37] Yang X X, Dong H R, Wang Q L, Chen Y, Hu X M. Guided crowd dynamics via modified social force model. Physica A:Statistical Mechanics and its Applications, 2014, (411):63-73 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=11f321c8e7490fe275c45ff433822b1a [38] Yang X X, Dong H R, Yao X M, Sun X B, Wang Q L, Zhou M. Necessity of guides in pedestrian emergency evacuation. Physica A:Statistical Mechanics and its Applications, 2016, (442):397-408 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e5a91f2c5d67c9d5c888fd3301bd8165 期刊类型引用(1)
1. 崔鹏浩,李成,蒋忠中. 考虑零件库存的两机器装配线性能评估与库存控制. 计算机集成制造系统. 2024(01): 289-299 .  百度学术
百度学术其他类型引用(4)
-

 下载:
下载:



计量
- 文章访问数: 4268
- HTML全文浏览量: 469
- PDF下载量: 407
- 被引次数: 5
