

-
摘要:
多目标跟踪中的传感器控制本质上是一个最优非线性控制问题, 其在理论分析和计算上极具挑战性. 本文基于区间不确定性推理, 利用箱粒子多伯努利滤波器提出了一种基于信息测度的传感器控制策略. 首先, 本文利用箱粒子实现多伯努利滤波器, 并通过一组带有权值的箱粒子来表征多目标后验概率密度函数. 其次, 利用箱粒子的高斯分布假设, 将多伯努利密度近似为高斯混合. 随后, 选择柯西施瓦兹(Cauchy-Schwarz, CS) 散度作为评价函数, 并详细推导了两个高斯混合之间的CS散度的求解公式, 以此为基础提出相应的传感器控制策略. 此外, 作为一种对比方案, 利用蒙特卡罗方法, 本文还给出了通过对箱粒子进行混合均匀采样, 进而通过点粒子求解CS散度的递推公式, 并提出了相应的控制策略. 最后, 仿真实验验证了所提算法的有效性.
Abstract:In multi-target tracking, sensor control is essentially an optimal nonlinear control problem. And it is also challenging in theoretical analysis and calculation. On the basis of interval uncertainty reasoning, this paper proposes an information measure based sensor control via box-particle multi-Bernoulli fllter. First, the box-particle multi-Bernoulli fllter is given and the posterior multi-Bernoulli density is approximated by a set of box particles with weights. Then, by constructing a box particle as a Gaussian distribution, the multi-Bernoulli density is approximated by mixed Gaussian components. Subsequently, this paper chooses the Cauchy-Schwarz (CS) divergence as the evaluation function, and deduces the CS divergence in detail between two Gaussian mixed multi-Bernoulli densities. The corresponding sensor control strategy is also proposed. Furthermore, as a compared scheme, this paper also gives a recursive formula for solving CS divergence by sampling particles from a box in the mixed uniform way using Monte Carlo method and presents the corresponding control strategy. Finally, simulation results verify the efiectiveness of the proposed algorithm.
-
Key words:
- Multi-target tracking /
- box-particle /
- interval analysis /
- Gaussian mixture /
- sensor control
1) 本文责任编委 曹向辉 -
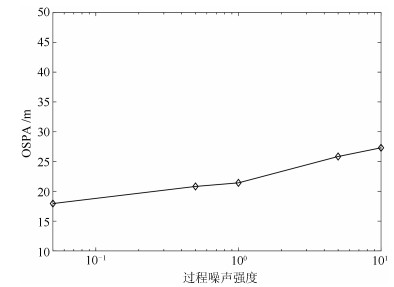
图 7 所提方案中不同过程噪声强度对估计性能的影响
Fig. 7 Tracking performance of different process noise intensities for the proposed strategy
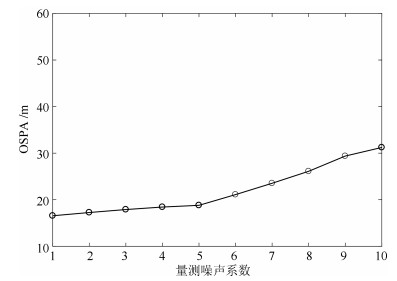
图 8 所提方案中不同量测噪声系数对估计性能的影响
Fig. 8 Tracking performance of different measure noise factors for the proposed strategy

图 9 所提方案中不同K值对估计性能的影响
Fig. 9 Tracking performance of difierent K values for the proposed strategy
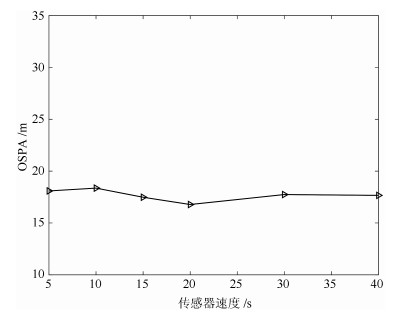
图 10 所提方案中不同的传感器速度对估计性能的影响
Fig. 10 Tracking performance of different sensor speeds for the proposed strategy
表 1 多目标参数
Table 1 Parameters of multi-target
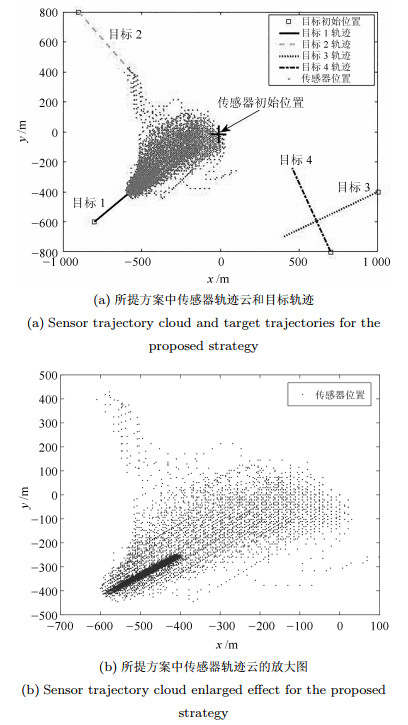
新生时刻(s) 消亡时刻(s) 初始位置(m) 速度(m/s) 目标1 1 50 [-800, -600] [8, 7] 目标2 5 40 [-900, 800] [10, -12] 目标3 10 40 [1 000, -400] [-20, -10] 目标4 15 50 [700, -800] [-7, 16]  下载: 导出CSV
下载: 导出CSV
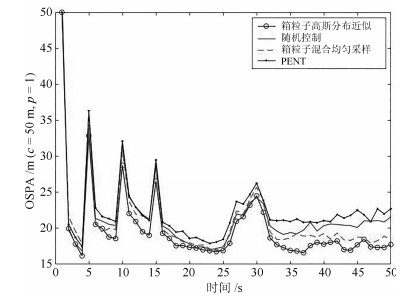
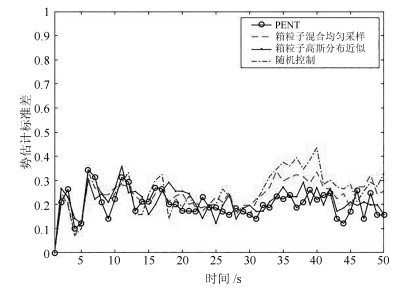
表 2 四种控制方案势估计误差均值的绝对值
Table 2 Absolute value of cardinality error for four control strategies
方案 势误差Ne 方案一(箱粒子高斯分布近似) 0.21338 方案二(箱粒子混合均匀采样) 0.23839 方案三(随机控制) 0.24979 方案四(PENT) 0.19987
下载: 导出CSV
表 3 四种控制方案单步平均运行时间对比
Table 3 The average execution time for four control strategies
方案 单步平均运行时间(s) 方案一(箱粒子高斯分布近似) 2.54639 方案二(箱粒子混合均匀采样) 3.71813 方案三(随机控制) 1.88743 方案四(PENT) 5.55129
下载: 导出CSV
表 4 不同高斯分量个数的性能比较
Table 4 Tracking performance comparison of different Gaussian components
wm 0.3 0.2 0.1 0.01 rm = 0.5 OSPA(m) 18.04 17.62 17.38 16.88 时间(s) 2.49 2.61 2.87 3.59 rm = 0.3 OSPA(m) 17.57 17.19 16.95 16.48 时间(s) 2.62 2.76 3.01 3.83 rm = 0.1 OSPA(m) 17.27 17.01 16.53 15.98 时间(s) 2.89 3.12 3.64 4.37
下载: 导出CSV
-
[1] Wang X Y, Hoseinnezhad R, Gostar A K, Rathnayake T, Xu B L, Babhadiashar A. Multi-sensor control for multi-object Bayes filters. Signal Processing, 2018, 142(1): 260-270 doi: 10.1016/j.sigpro.2017.07.031 [2] Gostar A K, Hoseinnezhad R, Babhadiashar A, Liu W F. Sensor-management for multi-target filters via minimization of posterior dispersion. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(6): 2877-2884 doi: 10.1109/TAES.2017.2718280 [3] Gostar A K, Hoseinnezhad R, Rathnayake T, Wang X Y, Babhadiashar A. Constrained sensor control for labeled multi-bernoulli filter using Cauchy-Schwarz divergence. IEEE Signal Processing Letters, 2017, 24(9): 1313-1317 doi: 10.1109/LSP.2017.2723924 [4] Li W, Han C Z. Dual sensor control scheme for multi-target tracking. Sensors, 2018, 18 (5): 1653 doi: 10.3390/s18051653 [5] Mahler R P S. Statistical Multisource Multitarget Information Fusion. Norwood, MA, USA: Artech House, 2007. http://www.mendeley.com/catalog/statistical-multisourcemultitarget-information-fusion/ [6] Mahler R P S. Advances in Statistical Multisource Multitarget Information Fusion. Norwood, MA, USA: Artech House, 2014. http://www.abe.pl/pl/offer/7145/ksiazki-artech-house/?deposit=20848432 [7] Mahler R P S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152-1178 doi: 10.1109/TAES.2003.1261119 [8] Mahler R P S. PHD filters of higher order in target number. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1523-1543 doi: 10.1109/TAES.2007.4441756 [9] Vo B T, Vo B N, Cantoni A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Transactions on Signal Processing, 2009, 57(2): 409-423 doi: 10.1109/TSP.2008.2007924 [10] Vo B N, Vo B T, Phung D. Labeled random finite sets and the Bayes multi-target tracking filter. IEEE Transactions on Signal Processing, 2014, 62(24): 6554-6567 doi: 10.1109/TSP.2014.2364014 [11] Vo B N, Vo B T, Hoang H G. An efficient implementation of the generalized labeled multi-Bernoulli filter. IEEE Transactions on Signal Processing, 2017, 65(8): 1975-1987 doi: 10.1109/TSP.2016.2641392 [12] Vo B N, Vo B T. Multi-sensor multi-object tracking with the generalized labeled multi-Bernoulli filter. IEEE Transactions on Signal Processing, 2019, 67(23): 5952-5967 doi: 10.1109/TSP.2019.2946023 [13] Vo B N, Ma W K. The Gaussian mixture probability hypothesis density filter. IEEE Transactions on Signal Processing, 2006, 54(11): 4091-4104 doi: 10.1109/TSP.2006.881190 [14] Vo B N, Singh S, Doucet A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4): 1224-1245 doi: 10.1109/TAES.2005.1561884 [15] Ristic B, Vo B N, Clark D. A note on the reward function for PHD filters with sensor control. IEEE Transactions on Aerospace Electronic Systems, 2011, 47(2): 1521-1529 doi: 10.1109/TAES.2011.5751278 [16] Ristic B, Arulampalam S. Bernoulli particle filter with observer control for bearings-only tracking in clutter. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(3): 2405-2415 doi: 10.1109/TAES.2012.6237599 [17] Hoang H G, Vo B T. Sensor management for multi-target tracking via multi-bernoulli filtering. Automatica, 2014, 50(4): 1135-1142 doi: 10.1016/j.automatica.2014.02.007 [18] Gostar A K, Hoseinnezhad R, Babhadiashar A, Papi F. OSPA-based sensor control. In: Proceedings of the 2015 International Conference on Control, Automation and Information Sciences. Changshu, China: IEEE, 2015. 214-218 http://ieeexplore.ieee.org/document/7338664/citations [19] Gostar A K, Hoseinnezhad R, Babhadiashar A. Multi-Bernoulli sensor control using cauchy-schwarz divergence. In: Proceedings of the 19th International Conference on Information Fusion. Heidelberg, Germany: IEEE, 2016. 651-657 [20] Milanese M, Vicino A. Optimal estimation theory for dynamic systems with set membership uncertainty: An overview. Automatica, 1991, 27(6): 997-1009 doi: 10.1016/0005-1098(91)90134-N [21] Combettes P L. The foundations of set theoretic estimation. Proceedings of the IEEE, 1993, 81(2): 182-208 doi: 10.1109/5.214546 [22] Abdallah F, Gning A, Bonnifait P. Box particle filtering for nonlinear state estimation using interval analysis. Automatica, 2008, 44(3): 807-815 doi: 10.1016/j.automatica.2007.07.024 [23] Gning A, Mihaylova L, Abdallah F. Mixture of uniform probability density functions for non linear state estimation using interval analysis. In: Proceedings of the 13th International Conference on Information Fusion. Edinburgh, UK: IEEE, 2010. 1-8 [24] Schikora M, Gning A, Mihaylova L, Cremers D, Koch W. Box-particle PHD filter for multi-target tracking. In: Proceedings of the 15th International Conference on Information Fusion. Singapore: IEEE, 2012. 106-113 [25] Gning A, Ristic B, Mihaylova L. Bernoulli particle/box-particle filters for detection and tracking in the presence of triple measurement uncertainty. IEEE Transactions on Signal Processing, 2012, 60(5): 2138-2151 doi: 10.1109/TSP.2012.2184538 [26] Zhao Xue-Gang, Song Li-Ping. Box-particle cardinality balanced multi-target multi-Bernoulli filter. Radioengineering, 2014, 23(2): 609-617 [27] Yang Jin-Long, Ji Hong-Bing, Ge Hong-Wei. Multi-model particle cardinality-balanced multi-target multi-Bernoulli algorithm for multiple manoeuvring target tracking. IET Radar Sonar and Navigation, 2013, 7(2): 101-112 doi: 10.1049/iet-rsn.2012.0184 [28] Li M, Lin Z P, An W, Zhou Y Y. Box-particle labeled multi-Bernoulli filter for multiple extended target tracking. Radioengineering, 2016, 25(3): 527-535 doi: 10.13164/re.2016.0527 [29] Gostar A K, Hoseinnezhad R, Babhadiashar A. Multi-Bernoulli sensor-selection for multi-target tracking with unknown clutter and detection profiles. Elsevier North-Holland, Inc, 2016, 119(2): 28-42 http://dl.acm.org/citation.cfm?id=2837588 [30] Mahler R P S. Multitarget sensor management of dispersed mobile sensors. Theory and Algorithms for Cooperative Systems, 2004, 8: 239-310 doi: 10.1142/9789812796592_0012 [31] Hoang H G, Vo B N, Vo B T. The Cauchy-Schwarz divergence for poisson point processes. In: Proceedings of the 2014 IEEE Workshop on Statistical Signal Processing, Gold Coast, QLD, Australia: IEEE, 2014. 240-243 [32] Li Xiao-Rong, Jilkov V P. Survey of maneuvering target tracking. part I: Dynamic models. IEEE Transactions on Aerospace and Electronic Systems, 2004, 39(4): 1333-1364 http://ieeexplore.ieee.org/document/1261132 [33] Schuhmacher D, Vo B T, Vo B N. A consistent metric for performance evaluation of multi-object filters. IEEE Transactions on Signal Processing, 2008, 56(8): 3447-3457 doi: 10.1109/TSP.2008.920469 [34] Mahler R P S, Zajic T R. Probabilistic objective functions for sensor management. In: Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition XⅢ, Orlando, FL, USA: SPIE, 2004. 233-244 [35] Hewer G A, Martin R D, Zeh J. Robust preprocessing for Kalman filtering of glint noise. IEEE Transactions on Aerospace and Electronic Systems, 1987, 23(1): 120-128 http://ieeexplore.ieee.org/document/4107518 [36] 王伟, 余玉揆, 郝燕玲. 一种新型混合并行粒子滤波频率估计方法. 电子学报, 2016, 44(3): 740-746 doi: 10.3969/j.issn.0372-2112.2016.03.036Wang Wei, Yu Yu-Kui, Hao Yan-Ling. A novel parallel particle filter for frequency estimation. Acta Electronica Sinica, 2016, 44(3): 740-746 doi: 10.3969/j.issn.0372-2112.2016.03.036 -

 下载:
下载:


计量
- 文章访问数: 888
- HTML全文浏览量: 556
- PDF下载量: 180
- 被引次数: 0
