

-
摘要: 研究传感器未建模动态对Buck变换器滑模控制系统的性能影响, 提出一种基于奇异摄动理论的稳定性和输出电压谐波分析的新方法.给出滑模控制器的参数整定方法, 选取传感器的上升时间作为摄动时间, 建立其未建模动态的奇异摄动模型, 在多时间尺度框架下, 揭示传感器稳定输出与摄动时间的影响关系.在此基础上, 构造一个类Lyapunov函数分析未建模动态对整个闭环控制系统的稳定性影响, 证明未建模动态诱发谐波的必然性.针对输出电压的谐波, 在频域内利用描述函数法推导出未建模动态摄动时间与其谐波幅值和频率的数学影响关系.仿真结果验证所提方法的正确性和有效性.Abstract: This paper investigates the influence of unmodeled dynamics from the sensor in a sliding mode controlled (SMC) Buck converter, and presents a quantitative analysis approach for the stability and output voltage harmonics on the basis of singular perturbation theory. The design parameter of SMC is first given. Taking the rise time of sensor as a perturbed parameter, the buck converter is modeled as a singularly perturbed system. Then in the frame of multiple-time scale, the influence relationship of stable sensor and the time constant is deduced, and further the stability of the whole closed-loop buck converter system is given by constructing a Lyapunov-like function, proving the existence of harmonics induced by unmodeled dynamics. The describing function method is introduced to analyze the frequency and amplitude of the output voltage harmonics. Simulations validate the proposed method.
-
Key words:
- Sliding mode control /
- unmodeled dynamics /
- sensor /
- singular perturbation /
- describing function method
-
大量研究证明滑模控制已成为电力变换器领域一种有效的鲁棒控制方法[1].然而, 滑模控制的切换非线性和电路本身的未建模动态始终是制约其实际应用的关键问题, 且两者相互影响, 都会导致输出电压谐波增加, 甚至破坏系统的稳定性.
未建模动态普遍存在于实际系统, 通常来源于系统建模过程中忽略的传感器、执行器、高阶状态项等, 其特点是具有较小的时间常数、不可测量性, 但其影响不可忽略[2].目前对其研究主要集中在未建模动态的克服和补偿两个方面[3-4].然而, 目前滑模控制领域却对未建模动态研究较少, 其根本原因归结于滑模控制的切换非线性.
从数学机理上, 滑模控制的切换控制与其控制律中包含的非线性函数sgn($\cdot$)有关, 进而诱发抖振问题, 严重制约滑模控制的实际应用.抖振问题诱发机理复杂, 系统建模、控制器设计、离散化实现等诸多环节皆可能导致, 表现为光滑的理论计算值与有限频率和幅值的锯齿信号的叠加, 进而不可避免会激发隐含的未建模动态对系统稳定性和动静态性能的影响.同时, 未建模动态又反过来加重滑模控制系统的抖振现象, 文献[5]证明即使理论上可做到完全无抖振的高阶滑模控制系统, 在未建模动态存在时, 同样也会诱发抖振问题.
当前, 如何在频域内量化研究抖振问题成为滑模控制领域的研究焦点.例如Levant等利用傅里叶级数展开法描述抖振信号的幅频特性[5]; Boiko等引入描述函数法近似分析抖振问题[6]; Goncalves等结合Poincare理论和LMI法来优化系统输出的抖振信号, 实现对抖振问题的参数可控化[7]; Boiko利用根轨迹法研究外部输入下的抖振信号幅频特性[8].然而, 现有研究多局限于线性时不变系统; 从数学机理研究方面, 多围绕着非线性函数sgn($\cdot$)的线性化来展开, 但均未考虑未建模动态和滑模切换非线性sgn($\cdot$)两者耦合对系统的影响.
针对Buck变换器滑模控制系统, 本文考虑传感器未建模动态的存在, 从数学机理上研究未建模动态和滑模切换非线性sgn($\cdot$)作用下的系统稳定性和输出电压谐波问题.建立未建模动态的奇异摄动模型, 给出滑模控制器的设计和未建模动态对传感器稳定输出的影响关系; 通过模型等价变换和构造一个类Lyapunov函数, 揭示未建模动态诱发谐波的必然性.并应用描述函数法分析Buck变换器的输出电压谐波, 推导出其谐波幅值和频率与未建模动态的影响关系.最后, 通过仿真证明所提方法的正确性.
1. 系统描述
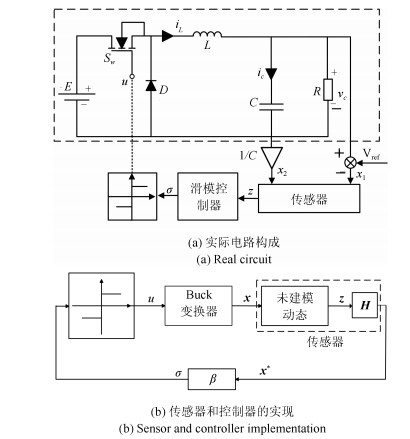
图 1(a)和1(b)分别为Buck变换器滑模控制系统的电路及传感器、控制器实现框图[9]. 图 1(a)虚框为Buck变换器的电路构成, 其中$E$为直流输入电压源, $D$为续流二级管, $R$为负载电阻, $L$和$C$分别为电感和电容, $v_{c}$为输出电压瞬时值, $i_{L}$和$i_{c}$分别为流过电感和电容的电流; $S_{w}$为功率开关管, 其通断状态由滑模切换控制$u$输出的"0"和"1"脉冲决定.
定义变量$\omega _{0}^{2}=1/LC$, 则$x_{1}$和$x_{2}$表示为
$$ \begin{equation} \label{eq2} \left\{ {\begin{array}{l} x_1 =v_c -V_{ref} \\ x_2 =\dot {x}_1 =\dot {v}_c -\dot {V}_{ref} =\dot {v}_c \\ \end{array}} \right. \end{equation} $$ (1) 根据Buck变换器的电路特性, 则有
$$ \begin{equation} \label{eq1} \left\{ {\begin{array}{l} \frac{{\rm d}i_L }{{\rm d}t}=\frac{1}{L}\left( {uE-v_c } \right) \\ \frac{{\rm d}v_c }{{\rm d}t}=\frac{1}{C}\left( {i_L -\frac{v_c }{R}} \right) \\ \end{array}} \right. \end{equation} $$ (2) 其中, $V_{ref}$为输出电压给定值; 由式(1), 有
$$ \begin{equation} \label{eq3}\begin{cases} \dot {x}_1 =x_2 \\ \dot {x}_2 =\ddot {x}_1 =-\frac{\dot {x}_1 }{RC}+\omega _0^2 \left( {uE-V_{ref} -x_1 } \right) \\ \end{cases} \end{equation} $$ (3) 对应的状态空间形式为
$$ \begin{equation} \label{eq4} {{\dot {\pmb x}}}={{\pmb A}{\pmb x}}+{{\pmb B}}u+{{\pmb f}} \end{equation} $$ (4) 其中, ${\pmb x}=[x_{1}$, $x_{2}]^{\rm T}$, 矩阵${\pmb{A}}$、${\pmb{B}}$和${\pmb{f}}$分别为
$$ {{\pmb A}}=\left[\! \!{{\begin{array}{*{20}c} 0 & 1 \\ {-\omega _0^2 } & {\frac {-1 }{RC}} \\ \end{array} }}\!\! \right], {{\pmb B}}=\left[\! \!{{\begin{array}{*{20}c} 0 \\ {\omega _0^2 E} \\ \end{array} }}\!\! \right], {{\pmb f}}=\left[ \!\!{{\begin{array}{*{20}c} 0 \\ {-\omega _0^2 V_{ref} } \\ \end{array} }}\!\! \right] $$ 图 1(a)中滑模面$\sigma $设计需要通过传感器检测系统状态${\pmb{x}}$, 常以线性霍尔传感器应用居多.通常, 传感器的输入输出特性包括动态特性和静态特性两部分, 如图 1(b)所示.针对传感器的动态特性, 这里只考虑其未建模动态影响, 由于其变化时间尺度与Buck变换器电压/电流的响应时间至少相差$10^{-3}$量级, 即具有两种不同时间作用的特点.引入奇异摄动理论[10], 这里取传感器的上升时间$\psi $为摄动参数, 将其未建模动态表示为
$$\begin{equation} \label{eq5} \psi {{\dot {\pmb z}}}={{\pmb K}{\pmb z}}+{{\pmb L}}{\pmb x} \end{equation} $$ (5) 其中, ${\pmb{K}}\in {\bf R}^{2\times 2}$, ${\pmb{L}}\in {\bf R}^{2\times 2}$均可通过传感器动态特性拟合获得; 针对传感器的静态特性, 这里仅考虑其线性输入-输出的变换关系, 即
$$\begin{equation} \label{eq6} {\pmb x}^\ast ={{\pmb H}{\pmb z}} \end{equation} $$ (6) 其中, ${\pmb{z}}=[z_{1}$, $z_{2}$]$^{\rm T}$, ${{\pmb x}}^\ast $=[$x_1^\ast $, $x_2^\ast]^{\rm T}$, ${\pmb{H}}\in {\bf R}^{2\times 2}$也可通过实际传感器性能指标确定.
2. 稳定性分析
下面从滑模控制器的设计、未建模动态对传感器的稳定输出及对整个闭环控制系统的稳定性影响进行研究.
2.1 滑模控制器的设计与参数整定
针对式(3) Buck变换器, 这里设计滑模面$\sigma $为$x_{1}$和$x_{2}$的线性组合, 即有
$$ \begin{equation} \label{eq7} \sigma =\lambda x_1+x_2 ={{\pmb \beta} x} \end{equation} $$ (7) 其中, 滑模面$\sigma \in {\bf R}^1$, ${\pmb \beta}=[\lambda, 1], $设计参数$\lambda >0.$
在相平面$x_{1}-x_{2}$上, $\sigma =0$代表一条通过原点, 斜率为$-\lambda $的直线.一旦Buck变换器系统状态到达并维持在滑模面, 系统特性可表征为$\sigma =\lambda x_1 +\dot {x}_1 =0$, 即有Buck变换器输出电压误差以$x_1 (t)=x_1 (0){\rm e}^{-\lambda t}$形式沿着滑模面$\sigma =0$渐近收敛到零, 其中, $x_{1}(0)$表示$x_{1}$的初值.
图 1(a)中, Buck变换器电路的通断状态直接由滑模切换控制律$u$决定, 即
$$\begin{equation} \label{eq8} u=-\frac{1}{2}\left[ {{\rm sgn}\left( \sigma \right)-1} \right] \end{equation} $$ (8) 针对式(7)滑模控制器设计参数$\lambda $, 下面从稳定性和响应速度两方面讨论其选择.
1) 从稳定性方面, 式(8)切换控制律的设计需要满足滑模到达条件$\sigma \dot {\sigma } < 0$.具体地, 由式(3), 根据开关管$S_{w}$的通断则有
当$u=1$, $\sigma < 0$时, 则需要满足$\dot {\sigma }>0$, 即
$$ \begin{equation} \label{eq9} l_1 =\left( {\lambda -\frac{1}{RC}} \right)x_2 +\omega _0^2 \left( {E-V_{ref} -x_1 } \right)>0 \end{equation} $$ (9) 当$u=0$, $\sigma >0$时, 则需要满足$\dot {\sigma } < 0$, 即
$$\begin{equation} \label{eq10} l_2 =\left( {\lambda -\frac{1}{RC}} \right)x_2 -\omega _0^2 \left( {V_{ref} +x_1 } \right)<0 \end{equation} $$ (10) 注意到, 不同的$\lambda $值决定滑动模态的不同存在区域, 分别如图 2(a)和2(b)所示.不管$\lambda >1/{(RC)}$还是$0 < \lambda < 1/{(RC)}$的哪种情况, 滑模线$\sigma =0$都会将相平面($x_{1}$, $x_{2})$分成两个区域, 定义区域1表示$l_{2} < 0$, $\sigma >0$, 区域2表示$l_{1}>0$, $\sigma < $0. $l_{1}$和$l_{2}$代表斜率为$\omega _{0}^{2}/(\lambda -RC)$的两条平行线, 在每个区域, 状态轨迹都在切换控制$u$作用下引向滑模线, 且滑动模态只会发生在穿越两个区域的部分, 这个部分就在$l_{1}$和$l_{2}$之间. $A$和$B$分别是滑模线$\sigma =0$与$l_{2}$和$l_{1}$的交点, 当状态轨迹在滑模存在区域1、2外的某点遇到滑模线时, 它就会超越滑模线, 如图 2(a), 从而导致输出电压产生超调; 而对比图 2(b), 却没有超调产生.因此, 从稳定性方面, 需要较小的$\lambda $值, 会使得滑模存在的区域增大, 即意味着Buck变换器有更宽的调压范围, 其中$\lambda =1/{(RC)}$为其临界值.
2) 从响应速度方面, 当Buck变换器系统状态到达并保持在滑模面$\sigma =0$时, 由式(7), 系统以指数形式渐近收敛, 则希望$\lambda $越大, 系统响应速度越快.
综合以上两种情况, 设计参数$\lambda $取$1/{(RC)}$为兼顾稳定性和响应速度的选取值[11].
2.2 未建模动态对传感器稳定输出的影响
由式(7), 因为滑模变量$\sigma $为系统状态$x_{1}$和$x_{2}$的线性组合, 为便于分析, 这里将图 1(a)简化为图 3.
 图 3 Buck变换器滑模控制系统的简化框图Fig. 3 Simplified block diagram of sliding mode controlled buck converter system
图 3 Buck变换器滑模控制系统的简化框图Fig. 3 Simplified block diagram of sliding mode controlled buck converter system由图 3, 则式(7)和(8)构成的滑模控制器变为
$$\begin{equation} \label{eq11} \left\{ {\begin{array}{l} \sigma ^\ast =Q\sigma \\ u=-\frac{1}{2}\left[ {{\rm sgn}\left( {\sigma ^\ast } \right)-1} \right] \\ \end{array}} \right. \end{equation} $$ (11) 其中, $Q\in {\bf R}^{1}$为与式(6) ${\pmb{H}}$对应的传感器静态特性常数值.
此时, 滑模变量$\sigma $为传感器的输入, $\sigma ^{\ast }$为其输出.定义未建模动态变量$\xi\in {\bf R}^{1}$, 将式(5)变形为
$$ \begin{equation} \label{eq12} \left\{ {\begin{array}{l} \xi _1 =\xi \\ \dot {\xi }_1 =\xi _2 \\ \psi ^2\dot {\xi }_2 =-\psi D\xi _2 -\xi _1 +R\sigma \\ \end{array}} \right. \end{equation} $$ (12) 其中, $D$和$R$为与传感器有关的测量常数, 可通过待定系数法确定.
假设滑模变量$\sigma $及其时间导数$\dot {\sigma }$有界, 在充分小时间$\Delta t~(\Delta t\to $0, $\psi \to $0)内, 由式(11)和式(12), $\xi $将收敛到$R\sigma $的邻域$\varepsilon _{1}(\psi $), 即有
$$ \begin{equation} \label{eq13} \left\{ {\begin{array}{l} \xi =R\sigma +\varepsilon _1 \left( \psi \right) \\ \sigma ^\ast =Q\sigma =QR\sigma +Q\varepsilon _1 \left( \psi \right) \\ \end{array}} \right. \end{equation} $$ (13) 其中, $\varepsilon _{1}>0$.可见, 传感器未建模动态的稳定输出值与摄动时间$\psi $有关.
进一步, 考虑到式(11)实际传感器$Q$值较小, 在充分小时间$\Delta t~(\Delta t\to 0, \psi \to 0)$内, 传感器"冻结"为理想输出, $\sigma^\ast =\sigma $, 即有
$$\begin{equation} \label{eq14} QR=1 \end{equation} $$ (14) 2.3 Buck变换器闭环滑模控制系统的稳定性
基于奇异摄动理论的多时间尺度[10], 相比于传感器未建模动态的快速性, Buck变换器电压和电流的变化缓慢, 式(4) "冻结"为线性系统.为便于理论分析, 这里对框图 3进行数学等价变换.
定理1. 在未建模动态快时间尺度$\psi $下, 图 4与图 3具有等价数学变换关系.其中, $w$为等价变换后的传感器输出.
 图 4 Buck变换器滑模控制系统的等价变换Fig. 4 Equivalent block diagram of sliding mode controlled Buck converter system
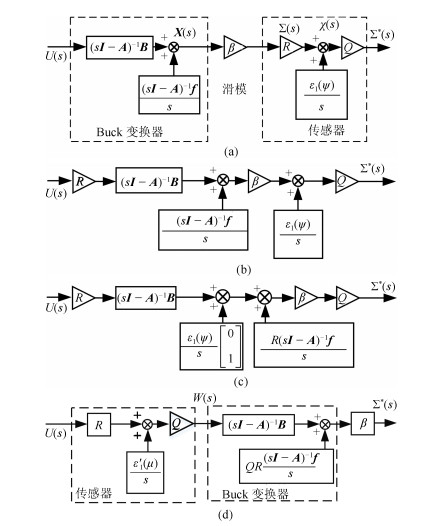
图 4 Buck变换器滑模控制系统的等价变换Fig. 4 Equivalent block diagram of sliding mode controlled Buck converter system证明. 在未建模动态时间尺度$\psi $内应用Laplace变换, 分别推导出图 3中滑模控制器、传感器和Buck变换器的传递函数.
假设${\pmb{x}}(0)=[x_{1}(0)$, $x_{2}(0)]^{\rm T}$, 针对式(4) Buck变换器模型进行Laplace变换, 即有
$$ \begin{equation} \label{eq15} {{\pmb X}}(s)=(s{{\pmb I}}-{{\pmb A}})^{-1}{{\pmb B}}U(s)+\frac{(s{{\pmb I}}-{{\pmb A}})^{-1}{{\pmb f}}}{s} \end{equation} $$ (15) 相应地, 式(7)滑模面$\sigma $的Laplace变换为
$$ \begin{equation} \label{eq16} \Sigma (s)={{\pmb \beta} {\pmb X}}(s) \end{equation} $$ (16) 假设未建模动态$\xi $初值$\xi $(0)为零, 式(13)对应的Laplace表示为
$$\begin{equation} \label{eq17} \left\{ {\begin{array}{l} \chi (s)=R\Sigma (s)+\frac{\varepsilon _1 (\psi )}{s} \\ \Sigma ^\ast (s)=Q\chi (s) \\ \end{array}} \right. \end{equation} $$ (17) 综合式(15)$\sim$(17), 图 3对应的开环传递函数流程图可表示为图 5(a).这里需要进行三次位置变换, 见图 5(b)$\sim$5(d).首先, 将常数增益$R$的位置调节到图 5(b), 接着将常数矩阵增益${\pmb \beta}\in {\bf R}^{1\times 2}$调整到图 5(c).定义常数${\varepsilon }'_1 \left(\psi \right)$, 满足
$$ \begin{equation} \label{eq18} (s{{\pmb I}}-{{\pmb A}})^{-1}{{\pmb B}}\frac{{\varepsilon }'_1 (\psi )}{s}=\frac{\varepsilon _1 (\psi )}{s}\left[ {\begin{array}{l} 0 \\ 1 \\ \end{array}} \right] \end{equation} $$ (18) 即有
$$ \begin{equation} \label{eq19} \frac{{\varepsilon }'_1 (\psi )}{s}={{\pmb B}}^+(s{{\pmb I}}-{{\pmb A}}) \frac{\varepsilon _1 (\psi )}{s}\left[ {\begin{array}{l} 0 \\ 1 \\ \end{array}} \right] \end{equation} $$ (19) 其中, ${\pmb{B}}^{+}$为矩阵${\pmb{B}}$的伪逆阵, ${{\pmb B}}^+={{\pmb B}}^{\rm T}\left({{{\pmb B}{\pmb B}}^{\rm T}} \right)^{-1}$.
借助环节($s{\pmb{I}}-{\pmb{A}})^{-1}{\pmb{B}}$和常数$Q$的变换, 最终得到图 5(d), 其对应的闭环控制系统框图如图 4.
由图 4和式(4), 对应Laplace反变换后的Buck变换器模型变为
$$ \begin{equation} \label{eq20} {{\dot {\pmb x}}}={{\pmb A}{\pmb x}}+{{\pmb B}}w+{{\pmb f}} \end{equation} $$ (20) 此时传感器的输出(13)变为
$$ \begin{equation} \label{eq21} \xi =Ru+{\varepsilon }'_1 \left( \psi \right) \end{equation} $$ (21) 且由于$w$为传感器输出, 即有
$$ \begin{equation} \label{eq22}\begin{cases} u=-\frac{1}{2}\left[ {{\rm sgn}\left( \sigma \right)-1} \right] \\ w=Q\xi =QRu+Q{\varepsilon }'_1 \left( \psi \right) \\ \end{cases} \end{equation} $$ (22) 此时式(12)传感器未建模动态$\xi $描述为
$$\begin{equation} \label{eq23} \begin{cases} \xi _1 =\xi \\ \dot {\xi }_1 =\xi _2 \\ \psi ^2\dot {\xi }_2 =-\psi D\xi _2 -\xi _1 +Ru \\ \end{cases} \end{equation} $$ (23) 将式(14)代入式(13), 这意味着图 3闭环控制系统状态$\sigma (x_{1}$和$x_{2}$的线性组合)将收敛在$Q\varepsilon _{1}(\psi $)邻域.由于定理1证明图 3和图 4闭环控制系统是等价的, 因此两者具有相同的收敛性, 图 4系统状态$\sigma $也将收敛到$Q\varepsilon _{1}(\psi)$邻域, 但在$Q\varepsilon _{1}(\psi $)邻域内不稳定, 即谐波必然存在.
定理2. 针对图 4 Buck变换器滑模闭环控制系统, 若滑模控制器如式(22), 传感器未建模动态如式(23), 则系统状态$\sigma $在$Q\varepsilon _{1}(\psi)$邻域内不稳定.
证明. 联合式(20)、(22)和(23), 对式(7) $\sigma $求三阶导数, 使得控制量$u$直接显现出来,
$$ \begin{equation} \label{eq24} \begin{cases} \sigma _1 =\sigma ={{\pmb \beta} {\pmb x}} \\ \sigma _2 =\dot {\sigma }_1 ={{\pmb \beta \dot {\pmb x}}}={ {\pmb \beta }{\pmb A}{\pmb x}}+{{\pmb \beta} {\pmb B}}w+{{\pmb \beta} {\pmb f}} \\ \dot {\sigma }_2 =\sigma _3 ={{\pmb \beta} {\pmb A}}^2{{\pmb x}}+{{\pmb \beta }{\pmb A}{\pmb B}}w+{{\pmb \beta }{\pmb A}{\pmb f}}+{{\pmb \beta}{\pmb B}}Q\xi _2 \\ \dot {\sigma }_3 ={{\pmb \beta} {\pmb A}}^3{{\pmb x}}+Q\xi _1 {{\pmb \beta} {\pmb A}}^2{{\pmb B}}+Q\xi _2 {{\pmb \beta} {\pmb A}{\pmb B}}+Q\dot {\xi }_2 { {\pmb \beta}{\pmb B}}+\\ \qquad {{\pmb \beta }{\pmb A}}^2{{\pmb f}} ={\pmb H}\left( {{{\pmb x}}, \xi _1 , \xi _2 } \right)+\\ \qquad\dfrac{1}{\psi ^2}\left\{ {-Q\xi _1 -\psi QD\xi _2 +QRu} \right\}{{\pmb \beta B}}+{{\pmb \beta A}}^2{{\pmb f}} \end{cases} \end{equation} $$ (24) 其中, $\sigma _{1}$、$\sigma _{2}$和$\sigma _{3}$分别是$\sigma $、$\dot {\sigma }$的一阶和二阶的导数, ${\pmb H}\left({{{\pmb x}}, \xi _1, \xi _2 } \right)={{\pmb \beta }{\pmb A}}^3{{\pmb x}}+Q\xi _1 {{\pmb \beta} {\pmb A}}^2{{\pmb B}}+Q\xi _2 {{\pmb \beta }{\pmb A}{\pmb B}}$.
为证明系统在子空间$\left({\sigma _1^{\rm T}, \sigma _2^{\rm T}, \sigma _3^{\rm T} } \right)$不稳定, 这里构造一个类Lyapunov函数
$$ \begin{equation} \label{eq25} V=\sigma _1 \sigma _3 -\frac{1}{2}\sigma _2^2 \end{equation} $$ (25) 对式(25)求时间的导数, 则有
$$ \begin{align*} \dot {V}=\, &\sigma _1 \Big\{ \psi ^2{\pmb H}\left( {{{\pmb x}}, \xi _1 , \xi _2 } \right)+\psi ^2{{\pmb \beta }{\pmb A}}^2{{\pmb f}}-Q\xi _1 -\psi QD\xi _2 -\\&QRu\Big\} \le \left| {\sigma _1 } \right|\Big\{ \psi ^2\left| {{\pmb H}\left( {{{\pmb x}}, \xi _1 , \xi _2 } \right)} \right|+\psi ^2\left| {{{\pmb \beta }{\pmb A}}^2{{\pmb f}}} \right|+\\&\psi \left| {QD\xi _2 } \right|+\left| {Q\xi _1 } \right|-QR \Big\} \end{align*} $$ 考虑到传感器未建模动态的存在, 若滑动模态仍然存在于$\sigma =0$, 根据滑模等效控制理论, $u$可用其等效分量$u_{eq}$替代, 通过求解$\dot {\sigma }=0$获得.而针对Buck变换器, 由于$u$仅能取0或1, 因此$\vert u_{eq}\vert < 1$.在未建模动态快时间尺度内$\Delta t~(\Delta t\to $0, $\psi \to 0$), 由式(25), 对应未建模动态有
$$ \begin{equation} \label{eq26} \xi =Ru_{eq} +{\varepsilon }'_1 \left( \psi \right) \end{equation} $$ (26) 代入式(14), 则$\vert Q\xi \vert =\vert u_{eq}+Q{\varepsilon }'_1 \left(\psi \right)\vert < 1$.假设初始时刻Lyapunov函数$V(0)\ne 0$, 显然$\dot {V}\le 0$成立.由式(24), 可见$V$符号不定但有界, 为此从能量守恒角度, 具体分两种情况讨论:
1) 当$\sigma _{1}\ne 0, \psi =0$, 则$\dot {V} < 0$成立, 这意味着当初始时刻Lyapunov函数$V(0)\ne 0$时, 在式(22)控制律$u$作用下, 系统状态将会远离$\sigma =0$所在邻域$Q\varepsilon _{1}(\psi $), 这显然与式(26)假设系统维持在$\sigma =0$不符;
2) 当$\sigma _{1}=0, \psi \ne $0, 则有$\dot {V}=0$, $\left({\sigma _1^{\rm T}, \sigma _2^{\rm T}, \sigma _3^{\rm T} } \right)\ne 0$只是些孤立的暂态点, 其影响可以忽略.
综上所述, 系统状态将会远离$\sigma =0$所在邻域$Q\varepsilon _{1}(\psi)_{, }$即系统状态$\sigma $在$Q\varepsilon _{1}(\psi $)邻域内不稳定.
3. 输出电压谐波的量化分析
针对图 1(b)实际传感器和滑模控制器的实现, 当传感器稳定输出时, 在未建模动态快时间尺度$\Delta t~(\Delta t\to $0, $\psi \to 0)$内, 线性霍尔传感器"冻结"为理想传感器, 联合式(5)$\sim$(6), ${\pmb{z}}={\pmb{x}}^\ast$, 即有
$$ \begin{equation} \label{eq27} -{{\pmb H}{\pmb K}}^{-1}{{\pmb L}}={{\pmb I}} \end{equation} $$ (27) 相应地, 实际系统滑模面${\sigma} ^\ast$为
$$ \begin{equation} \label{eq28} { \sigma} ^\ast ={{\pmb \beta }{\pmb x}}^\ast \end{equation} $$ (28) 类似地, 在充分小时间$\Delta t(\Delta t\to 0$, $\psi \to 0)$内, Buck变换器系统状态变化缓慢, "冻结"为线性系统.为方便描述, 定义变量${\pmb{N}}\in {\bf R}^{2\times 1}$
$$\begin{equation} \label{eq29} {{\pmb N}}={{\pmb A}{\pmb x}}+{{\pmb f}} \end{equation} $$ (29) 则此时式(4) Buck变换器系统变换为
$$\begin{equation} \label{eq30} {{\dot {\pmb x}}}={{\pmb N}}+{{\pmb B}}u \end{equation} $$ (30) 这也意味着变量${\pmb{N}}$可视为一个常量.
假设${\pmb{z}}(0)=[z_{1}$(0), $z_{2}(0)]^{\rm T}$, ${\pmb{x}}(0)=[x_{1}$(0), $x_{2}(0)]^{\rm T}$为系统初值, 对式(28)进行Laplace变换, 则有
$$ \begin{align} \label{eq31} \Sigma ^\ast \left( s \right)=\, &{{\pmb \beta }{\pmb X}}^\ast \left( s \right)={{\pmb \beta }{\pmb H}{\pmb Z}}\left( s \right)= {{\pmb \beta }{\pmb H}}\left( {\psi s{\pmb I}-{\pmb K}} \right)^{-1}\times\nonumber\\&\left\{ {{{\pmb L}}\frac{{{\pmb N}}}{s^2}+} {{\pmb L}}\frac{{{\pmb B}}}{s}U\left( s \right)+ {{{\pmb L}}\frac{{{\pmb x}}(0)}{s}+\psi {{\pmb z}}(0)} \right\} \end{align} $$ (31) 这里将描述函数法[15]应用于Buck变换器输出电压谐波的分析, 显然图 1(b)只有切换控制律sgn($\cdot$)一个非线性环节, 因此需将其转换成调和函数加上常数的表示形式
$$ \begin{equation} \label{eq32} {{ \sigma }}^\ast ={{ \alpha }}+{{ \beta }}\sin \omega t \end{equation} $$ (32) 其中, $\alpha $, $\beta $和$\omega $均为常数, 且有$\alpha < \beta $.
相应地, 将式(32)代入切换控制律$u$, 则其傅里叶级数展开前两项可表示为
$$ \begin{equation} \label{eq33} \begin{cases} u=u_0+u_1\sin \omega t \\ u_0 =\frac{\omega }{2\pi }\int_0^{{2\pi } \mathord{\left/ {\vphantom {{2\pi } \omega }} \right. } \omega } {u{\rm d}t=\frac{1}{2}-\frac{1}{\pi }} {\rm arc}\sin \frac{\alpha }{\beta } \\ u_1=\frac{\omega }{\pi }\int_0^{{2\pi } \mathord{\left/ {\vphantom {{2\pi } \omega }} \right. } \omega } {u\sin \omega t{\rm d}t=-\frac{2}{\pi }} \cos \left( {{\rm arc}\sin \frac{\alpha } {\beta }} \right)= \\ \qquad -\frac{2}{\pi }\sqrt {1-\left( {\frac{\alpha } {\beta }} \right)^2} \\ \end{cases} \end{equation} $$ (33) 假设在充分小的时间$\Delta t~(\Delta t\to 0$, $\psi \to 0)$内, 由式(27)和(28), 则式(31)变为
$$ \begin{align} \label{eq34} \Sigma ^\ast ( s )=\, &-{{\pmb \beta}{\pmb H}{\pmb K}}^{-1}{{\pmb L}}\Bigg\{ {\frac{{{\pmb N}}}{s^2}} +\frac{{{\pmb B}}}{s^2}u_0 + \nonumber\\&{\frac{{{\pmb B}}}{s}\left( {\frac{\omega u_1 }{s^2+\omega ^2}} \right)+\frac{{{\pmb x}}( 0 )}{s}} \Bigg\} =\nonumber\\& -{{\pmb \beta }}\left\{ {\frac{{{\pmb N}}}{s^2}} +\frac{{{\pmb B}}}{s^2}u_0 +{\frac{{{\pmb B}}}{s}\left( {\frac{\omega u_1 }{s^2+\omega ^2}} \right)+\frac{{{\pmb x}}( 0 )}{s}} \right\} \end{align} $$ (34) 同理, 对式(32)也进行Laplace变换, 则
$$ \begin{equation} \label{eq35} \Sigma ^\ast \left( s \right)=\frac{\alpha }{s}+\frac{\beta \omega }{s^2+\omega ^2} \end{equation} $$ (35) 根据待定系数法, 为使得式(34)和(35)等价, 需要消去$1/s^{2}$项, 因此有
$$ \begin{equation} \label{eq36} u_0=-\frac{{{\pmb \beta }{\pmb N}}}{{{\pmb \beta }{\pmb B}}} \end{equation} $$ (36) 将式(36)代入式(33), 可进一步得到
$$ \begin{equation} \label{eq37} u_1=-\mbox{ }\frac{2}{\pi }\sin \left( {\frac{{{\pmb \beta }{\pmb N}}\pi }{{{\pmb \beta }{\pmb B}}}} \right) \end{equation} $$ (37) 联合式(36)$ \sim $(37), 则此时Buck变换器的行为可以描述为
$$ \begin{align} \label{eq38} {{\dot {\pmb x}}}=\, &{{\pmb N}}+{{\pmb B}} \left( {u_0+u_1 \sin \omega t} \right) =\nonumber\\& {{\pmb N}}-{{\pmb B}}\frac{{{\pmb \beta }{\pmb N}}}{{{\pmb \beta }{\pmb B}}}-{{\pmb B}}\left\{ {\frac{2}{\pi }} {\sin \left( {\frac{{{\pmb \beta }{\pmb N}}\pi }{{{\pmb \beta }{\pmb B}}}} \right)} \right\} \sin \omega t \end{align} $$ (38) 忽略式(31)中1/$s^{2}$项和初值${\pmb{x}}(0)$、${\pmb{z}}(0)$, 可以求出滑模变量$\sigma $相对于控制量$u$一次谐波的相位为
$$ \begin{equation} \label{eq39} \arg \left\{ {{{\pmb \beta }{\pmb H}}\left( {\psi {\rm j}\omega {{\pmb I}}-{\rm {\pmb K}}} \right)^{-1}{{\pmb L}}\frac{{{\pmb B}}}{s}} \right\}=\arg \left\{ {\frac{\Sigma ^\ast \left( {{\rm j}\omega } \right)}{U\left( {{\rm j}\omega } \right)}} \right\}=\pm k\pi \end{equation} $$ (39) 因为滑模变量$\sigma $与控制律$u$总是符号相反, 由式(39)可得
$$ \begin{equation} \label{eq40} -\frac{\pi }{2}+\arg \left\{ {{{\pmb \beta }}{\pmb H}\left( {{\rm j}\omega ^\ast {\pmb I}-{\pmb K}} \right)^{-1}{\pmb L}{\pmb B}} \right\}=\pm k\pi , {\kern 1pt}{\kern 1pt}{\kern 1pt}{\kern 1pt}k=1, 3, 5, \cdots \end{equation} $$ (40) 其中, $\omega ^\ast=\psi \omega $.
定理3. 针对方程(40), 关于$\omega $*总有解, 且不唯一.
证明. 由式(40)可知, 若其解存在, 则应有非零实数$m$存在, 使得${{\pmb \beta }}{\pmb H}\left({{\rm j}\omega ^\ast {\pmb I}-{\pmb K}} \right)^{-1}{\pmb L}{\pmb B}=m{\rm j}$.
定义矩阵变量${\pmb{G}}$为
$$ \begin{equation} \label{eq41} {\pmb G}={\pmb H}\left( {{\rm j}\omega ^\ast {\pmb I}-{\pmb K}} \right)^{-1}{\pmb L}=\left[ {{\begin{array}{*{20}c} {g_{11} } & {g_{12} } \\ {g_{21} } & {g_{22} } \\ \end{array} }} \right] \end{equation} $$ (41) 代入式(4)的矩阵${\pmb{B}}$和式(7)的矩阵$\beta $, 即可推出$\omega _0^2 E\left({g_{12} \lambda +g_{22} } \right)=m{\rm j}$成立, 进而可知只需满足$g_{12}$和$g_{22}$为纯虚数, 即可保证$\omega $*解存在.
由式(27), (${\rm j}\omega^\ast {\pmb{I}}-{\pmb{K}})={\pmb{H}}^{-1}{\pmb{GL}}^{-1}$.因为${\pmb{H}}$与${\pmb{L}}$都为可逆矩阵, 则需进一步判断矩阵${\pmb{G}}$的可逆性以证明$\omega $*解的不唯一性.
由于式(5)常量阵${\pmb{K}}$已知, 这里将其展开表示为${{\pmb K}}=\left[{{\begin{array}{*{20}c} {k_{11} } & {k_{12} } \\ {k_{21} } & {k_{22} } \\ \end{array} }} \right]$, 则有
$$\begin{equation} \label{eq42} {\rm j}\omega ^\ast {\pmb I}-{\pmb K}=\left[ {{\begin{array}{*{20}c} {\omega ^\ast {\rm j}-k_{11} } & -k_{12} \\ -k_{21} & {\omega ^\ast {\rm j}-k_{22} } \\ \end{array} }} \right] \end{equation} $$ (42) 进而有$\vert {\rm j}\omega ^\ast{\pmb{I}}-{\pmb{K}}\vert =-{\omega ^\ast}^{2}-(k_{11}+k_{22})\omega ^\ast{\rm j}+k_{11}k_{22 }-k_{12}k_{21}$.可见, 总可以取到$\omega ^{\ast }$值, 使得$\vert {\rm j}\omega ^\ast{\pmb{I}}-{\pmb{K}}\vert \ne 0$, $({\rm j}\omega ^\ast{\pmb{I}}-{\pmb{K}})$可逆, 也意味矩阵${\pmb{G}}$可逆, 即有$\omega ^\ast$解为
$$ \begin{equation} \label{eq43} {\rm j}\omega ^\ast {{\pmb I}}={{\pmb L}{\pmb G}}^{-1}{{\pmb H}}+{{\pmb K}} \end{equation} $$ (43) 综合式(41)和(43)分析, 只要矩阵${\pmb{G}}$中的纯虚数$g_{12}$和$g_{22}$任意取, 且${\pmb{G}}$可逆, 就能保证$\omega^{\ast }$总有解, 且不唯一.
这里将式(40) $\omega $*的解表示为$\tilde {\omega }$, 则有
$$ \begin{equation} \label{eq44} \omega =\frac{\tilde {\omega }}{\psi } \end{equation} $$ (44) 进而, 式(38)简化为
$$ \begin{equation} \label{eq45} {{\dot {\pmb x}}}={{\pmb N}}-{{\pmb B}}\frac{{{\pmb \beta }{\pmb N}}}{{{\pmb \beta }{\pmb B}}}-{{\pmb B}}\left\{ {\frac{2}{\pi }} \right.\left. {\sin \left( {\frac{{{\pmb \beta }{\pmb N}}\pi }{{{\pmb \beta }{\pmb B}}}} \right)} \right\} \sin \frac{\tilde {\omega }}{\psi }t \end{equation} $$ (45) 从而建立了Buck变换器输出电压${\pmb{x}}$谐波与未建模动态时间常数$\psi $的影响关系, 即
1) 谐波频率与时间常数$\psi $成反比;
2) 随着时间常数$\psi $变化, 谐波幅值变化$\Delta \dot {x}\in \left[ {-\frac{2}{\pi }{\pmb B}\sin \left({\frac{{\pmb C}{\pmb N}\pi }{{\pmb C}{\pmb B}}} \right)}, 0 \right]$.
4. 仿真分析
以表 1 Buck变换器电路为例, 通过仿真验证未建模动态对闭环控制系统的影响.
表 1 Buck变换器的电路参数Table 1 Circuit parameters of Buck converter电路参数 数值 电感 $L=50$ mH 电容 $C=100$ ${\rm{ \mathsf{ μ} }}$F 负载电阻 $R=10\, \Omega $ 输入电压 $E=10$ V 给定输出电压 $V_{ref}=5$ V 首先, 将图 1包括传感器的Buck变换器控制系统(简称为"实际系统"), 与不包括传感器的理想Buck变换器滑模控制系统(简称为"理想系统")进行仿真对比.
为使得理论研究更贴近实际系统, 选择集成线性霍尔传感器ACS712[12], 根据芯片说明附带的性能测试结果, 利用GetData软件获取实验数据, 再将得到的Excel数据输入到Matlab辨识工具箱, 得到未建模动态式(16)对应的传递函数为
$$ \begin{equation}y=\frac{0.01115}{s^2+2.708\times{10}^{-12}s+0.0117}\end{equation} $$ (46) 首先, 以传感器上升时间$\psi $为6.647 ${\rm{ \mathsf{ μ} }}$ s为例, 图 6(a)$ \sim $6(c)分别给有/无考虑传感器未建模动态情况下的滑模变量$\sigma $、切换控制$u$和Buck变换器输出电压$v_{c}$的仿真结果对比.
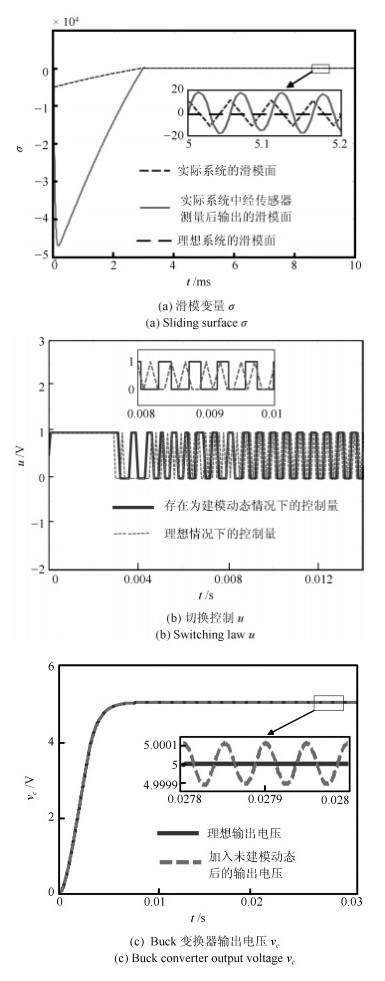 图 6 理想和实际Buck变换器的仿真性能比Fig. 6 Performance comparison of ideal and real Buck converters
图 6 理想和实际Buck变换器的仿真性能比Fig. 6 Performance comparison of ideal and real Buck converters可见, 理想系统的滑模变量$\sigma $平滑且无超调量, 而当加入传感器环节后, 由图 2系统框图, 此时的传感器输入$\sigma $与传感器输出$\sigma $*都存在谐波, 表现为传感器输出幅值增大, 相位滞后, 即意味着确实如定理2证明谐波存在于一个邻域内. 图 6(b)为控制器输出的切换控制$u$, 其脉冲信号直接控制开关管$S_{w}$的门极通断, 理想系统的开关频率约为50 kHz, 而实际系统开关频率约为24 kHz, 即未建模动态的存在也会影响开关管$S_{w}$的通断.由图 6(c), 理想系统输出电压$v_{c}$平滑, 且稳定于给定值5 V, 稳态误差近乎为零, 而实际系统却存在谐波, 稳态误差约为0.12 mV, 这说明未建模动态影响不可忽略.
为进一步揭示传感器摄动时间对输出电压谐波的影响关系, 取ACS712的上升时间$\psi $为6.647 ${\rm{ \mathsf{ μ} }}$s, 32.09 ${\rm{ \mathsf{ μ} }}$s, 291.26 ${\rm{ \mathsf{ μ} }}$s, 623.02 ${\rm{ \mathsf{ μ} }}$s四个值, 其性能对比分别如图 7和表 2.
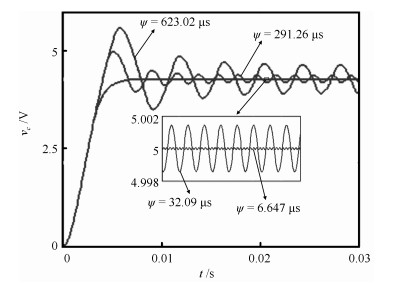 图 7 $\psi $对输出电压$v_{c}$的性能影响Fig. 7 Effect of $\psi $ on the output voltage performance表 2 $\psi $取不同值时的输出电压$v_{c}$性能对比Table 2 Different values of $\psi $ and their influence on the output voltage $v_{c}$
图 7 $\psi $对输出电压$v_{c}$的性能影响Fig. 7 Effect of $\psi $ on the output voltage performance表 2 $\psi $取不同值时的输出电压$v_{c}$性能对比Table 2 Different values of $\psi $ and their influence on the output voltage $v_{c}$时间常数 谐波幅值 谐波频率 稳态误差 相对误差 $\psi\, ({\rm{ \mathsf{ μ} }}$s) (mV) (Hz) (mV) (%) 6.647 0.24 1000 0.12 0.0024 32.09 2.8 4515 1.4 0.028 291.26 224 526.31 112 2.24 623.02 842 263.2 421 8.42 可见, 当摄动时间$\psi $为6.647${\rm{ \mathsf{ μ} }}$s时, 输出电压的相对误差为0.0024 %, 传感器未建模动态的影响几乎可忽略; 当摄动时间$\psi $取291.26 ${\rm{ \mathsf{ μ} }} $s时, 对应的相对误差为2.24 %, 为实际Buck变换器可接受的电压性能指标; 而当$\psi $增大到623.02 ${\rm{ \mathsf{ μ} }}$s时, 相对误差却高达8.42 %, 谐波含量过大, 输出电压性能严重恶化, 无法满足实际系统要求.具体地, 当摄动时间$\psi $在6.647 ${\rm{ \mathsf{ μ} }}$s到623.02 ${\rm{ \mathsf{ μ} }}$s的范围内变化时, 谐波频率呈减小趋势, 谐波幅值和输出电压稳态误差呈增大趋势, 证明未建模动态确实与系统性能影响有直接关系, 这与式(45)理论分析相符.
5. 结论
针对Buck变换器滑模控制系统, 本文研究了传感器未建模动态对其稳定性和输出电压谐波的影响.基于奇异摄动理论的多时间尺度特性, 建立传感器未建模动态的模型; 拓展实现了描述函数法在非线性系统中抖振问题的量化分析, 从数学机理上揭示传感器未建模动态和滑模切换非线性sgn($\cdot$)共同影响下的Buck变换器输出电压谐波的幅频特性.最后, 通过仿真验证理论研究的正确性.研究结果将对滑模控制系统的实用化和工程化研究提供重要的理论借鉴价值.
-
图 3 Buck变换器滑模控制系统的简化框图
Fig. 3 Simplified block diagram of sliding mode controlled buck converter system
图 4 Buck变换器滑模控制系统的等价变换
Fig. 4 Equivalent block diagram of sliding mode controlled Buck converter system
图 6 理想和实际Buck变换器的仿真性能比
Fig. 6 Performance comparison of ideal and real Buck converters
图 7 $\psi $对输出电压$v_{c}$的性能影响
Fig. 7 Effect of $\psi $ on the output voltage performance
表 1 Buck变换器的电路参数
Table 1 Circuit parameters of Buck converter
电路参数 数值 电感 $L=50$ mH 电容 $C=100$ ${\rm{ \mathsf{ μ} }}$F 负载电阻 $R=10\, \Omega $ 输入电压 $E=10$ V 给定输出电压 $V_{ref}=5$ V  下载: 导出CSV
下载: 导出CSV
表 2 $\psi $取不同值时的输出电压$v_{c}$性能对比
Table 2 Different values of $\psi $ and their influence on the output voltage $v_{c}$
时间常数 谐波幅值 谐波频率 稳态误差 相对误差 $\psi\, ({\rm{ \mathsf{ μ} }}$s) (mV) (Hz) (mV) (%) 6.647 0.24 1000 0.12 0.0024 32.09 2.8 4515 1.4 0.028 291.26 224 526.31 112 2.24 623.02 842 263.2 421 8.42
下载: 导出CSV
-
[1] 王艳敏, 曹雨晴, 夏红伟. Buck变换器的电压电流双闭环终端滑模控制.电机与控制学报, 2016, 20(08): 92-97 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=djykzxb201608012Wang Yan-Min, Cao Yu-Qing, Xia Hong-Wei. Terminal sliding mode control for Buck converter with structure of voltage and current double closed loop. Electric Machines and Control, 2016, 20(08): 92-97 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=djykzxb201608012 [2] Krishnamurthy P, Khorrami F. A general dynamic scaling based control redesign to handle input unmodeled dynamics in uncertain nonlinear systems. IEEE Transactions on Automatic Control, 2017, 62(9): 4719-4726 [3] 杨天皓, 李健, 贾瑶, 刘腾飞, 柴天佑.虚拟未建模动态补偿驱动的双率自适应控制.自动化学报, 2017, 44(1): 299-310 doi: 10.16383/j.aas.2018.c160623Yang Tian-Hao, Li Jian, Jia Yao, Liu Teng-Fei, Chai Tian-You. Dual-rate adaptive control driven by virtual unmodeled dynamics compensation in industrial heat exchange process. Acta Automatica Sinica, 2017, 44(1): 299-310 doi: 10.16383/j.aas.2018.c160623 [4] 柴天佑, 张亚军.基于未建模动态补偿的非线性自适应切换控制方法, 自动化学报. 2011, 37(7): 773-786 doi: 10.3724/SP.J.1004.2011.00773Chai Tian-You, Zhang Ya-Jun. Nonlinear adaptive switching control method based on unmodeled dynamics compensation. Acta Automatica Sinica, 2011, 37(7): 773-786 doi: 10.3724/SP.J.1004.2011.00773 [5] Levant A. Chattering analysis. IEEE Transactions on Automatic Control, 2010, 55(6): 1380-1389 [6] Boiko I, Fridman L, Iriarte R, Pisano A, Usai E. Parameter tuning of second-order sliding mode controllers for linear plants with dynamic actuators. Automatica. 2006, 42(7): 677-683 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a4968355d3bc45b64ef9002990e68fa8 [7] Goncalves J M, Megretski A, Dahleh M A. Global stability of relay feedback systems. IEEE Transactions on Automatic Control. 2011, 46(4): 550-562 [8] Boiko I. Oscillations and transfer properties of relay servo systems-the locus of a perturbed relay system approach. Automatica. 2005, 41(7): 677-683 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b5b9ba81e1a5872c78312b1b261df1f4 [9] 杨晨, 程盈盈, 都海波, 王金平, 何怡刚. Buck型变换器自适应有限时间降压控制算法研究.自动化学报, 2016, 42(1): 315-320 doi: 10.16383/j.aas.2016.c150446Yang Chen, Cheng Ying-Ying, Du Hai-Bo, Wang Jin-Ping, He Yi-Gang. An adaptive finite-time control algorithm for buck converter systems. Acta Automatica Sinica, 2016, 42(1): 315-320 doi: 10.16383/j.aas.2016.c150446 [10] Lee H, Utkin I V. Chattering suppression methods in sliding mode control systems. Annual Reviews in Control, 2007, 31(5): 179-188 [11] Komurcugil H. Non-singular terminal sliding-mode control of DC-DC buck converters. Control Engineering Practice. 2013, 21(5): 321-332 [12] ACS712 Datasheet (PDF)-Allegro MicroSystem[Online], available: https://www.alldatasheet.com/datasheet-pdf/pdf/168326/ALLEGRO/ACS712.htm, August 1, 2018 -

 下载:
下载:

计量
- 文章访问数: 1188
- HTML全文浏览量: 218
- PDF下载量: 195
- 被引次数: 0
