

A Fault Detection Method Based on Data Reliability and Interval Evidence Reasoning
-
摘要: 为解决故障检测方法在处理数据不确定性问题上的不足, 本文提出一种基于数据可靠性和区间证据推理(Interval evidential reasoning, IER)的故障检测方法. 该方法通过融合专家知识与考虑可靠性的监测数据, 实现报警阈值区间的更新与优化, 从而提高故障检测的准确性. 首先基于信息一致性方法计算数据可靠度, 然后基于区间证据推理理论, 构建区间阈值的更新与优化模型, 最后基于投影协方差矩阵自适应进化策略算法求解优化模型, 得到故障检测误漏报率最小的最优报警阈值区间. 对石油管道泄漏实例和航天继电器加速寿命测试实例的故障检测问题进行了研究, 通过对比分析, 验证了所提方法的有效性.Abstract: In order to solve the problem of the fault detection method in dealing with data uncertainty, a fault detection method based on data reliability and interval evidence reasoning is proposed in this paper. In the proposed method, the interval threshold can be updated and optimized by integrating expert knowledge and reliability of monitoring data, and the accuracy of fault detection can be improved. Firstly, the data reliability based on the information consistency method is calculated. Then, the updating and optimization model of the interval threshold is established based on the interval evidence reasoning. Finally, the optimal alarm threshold interval with minimum false negatives and positives rate can be obtained by solving the optimization model based on projection covariance matrix adaptation evolution strategy algorithm. Two case studies of oil pipeline leak and aerospace relay accelerated life test are used to study the problem of fault detection. The effectiveness of the proposed method is verified by analyzing and comparing with several other methods.
-

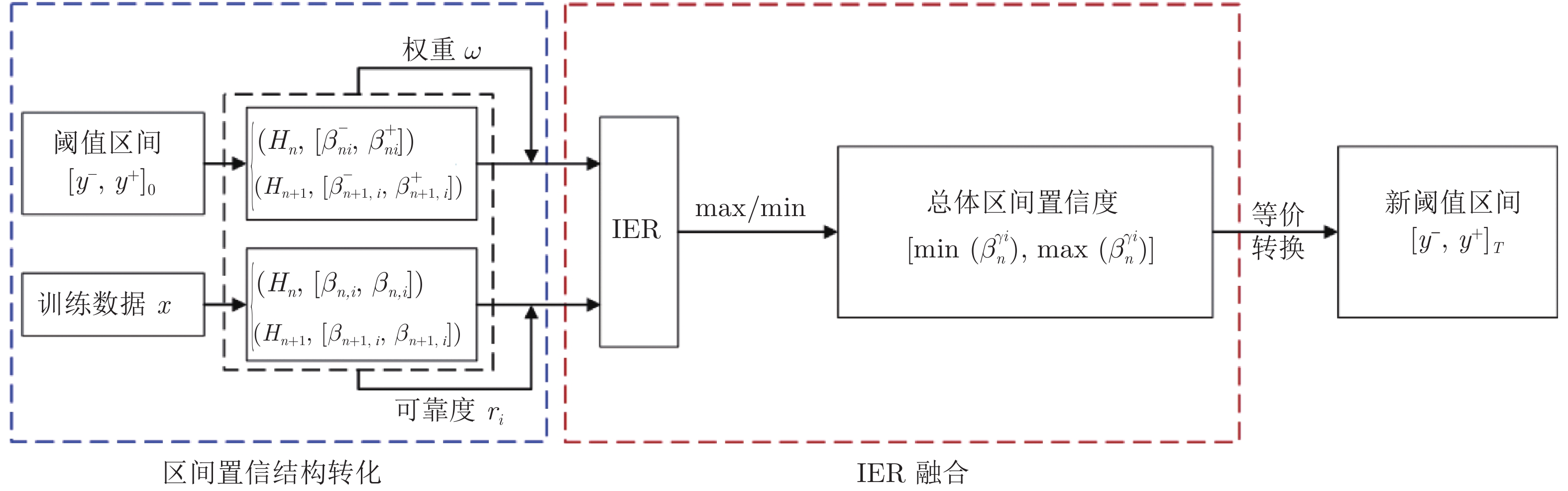
图 1 基于数据可靠性和IER的故障检测方法结构图
Fig. 1 Structure diagram of fault detection method based on data reliability and IER
表 1 初始阈值区间的区间置信度
Table 1 Interval belief degree of initial threshold interval
评价等级 区间置信度 $H_1$ $\left[ {0,0.0214} \right]$ $H_2$ $\left[ {0.7538,1} \right]$ $H_3$ $\left[ {0,0.2462} \right]$  下载: 导出CSV
下载: 导出CSV
表 2 监测数据的区间置信度
Table 2 Interval belief degree of monitoring data
训练数据 H1 H2 H3 $x_1$ $\left[ {0.8571,0.8571} \right]$ $\left[ {0.1429,0.1429} \right]$ $\left[ {0,0} \right]$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $x_{300}$ $\left[ {0,0} \right]$ $\left[ {1,1} \right]$ $\left[ {0,0} \right]$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $x_{700}$ $\left[ {0,0} \right]$ $\left[ {0.9167,0.9167} \right]$ $\left[ {0.0823,0.0823}\right]$
下载: 导出CSV
表 3 总体区间置信度更新过程
Table 3 The update process of overall interval belief degree
总体区间置信度 $H_1$ $H_2$ $H_3$ $\left[ {\min \beta _n ,\max \beta _n } \right]_1$ $\left[ {0,0} \right]$ $\left[ {0.7910,0.7963} \right]$ $\left[ {0.2037,0.2090} \right]$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\left[ {\min \beta _n ,\max \beta _n } \right]_{300}$ $\left[ {0,0} \right]$ $\left[ {0.8751,0.8816} \right]$ $\left[ {0.1184,0.1249} \right]$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\left[ {\min \beta _n ,\max \beta _n } \right]_{700}$ $\left[ {0,0} \right]$ $\left[ {0.9262,0.9507} \right]$ $\left[ {0.0493,0.0738} \right]$
下载: 导出CSV
表 4 故障检测效果比较(%)
Table 4 Comparison of fault detection effects (%)
优化方法 阈值 误报率 漏报率 $G$ 未优化 $\left[ {0.8925,1.0477} \right]$ $0$ $9$ $9$ 神经网络方法 $\left[ {0.9832,1.0990} \right]$ $0$ $12$ $12$ IER方法 $\left[ {0.9510,0.9749} \right]$ $0.6$ $7.8$ $8.4$ IER$(r_i)$ $\left[ {0.9296,0.9443} \right]$ $4.8$ $1.8$ $6.6$
下载: 导出CSV
表 5 第1组数据的总体区间置信度更新过程
Table 5 The overall interval confidence update process for the first set of data
总体区间置信度 $H_1$ $H_2$ $H_3$ $\left[ {\min \beta _n ,\max \beta _n } \right]_1$ $\left[ {0,0} \right]$ $\left[ {0.7093,0.7619} \right]$ $\left[ {0.2381,0.2907} \right]$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\left[ {\min \beta _n ,\max \beta _n } \right]_{100}$ $\left[ {0,0} \right]$ $\left[ {0.6842,0.7135} \right]$ $\left[ {0.2865,0.3158} \right]$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\left[ {\min \beta _n ,\max \beta _n } \right]_{300}$ $\left[ {0,0} \right]$ $\left[ {0.6547,0.7488} \right]$ $\left[ {0.2512,0.3453} \right]$
下载: 导出CSV
表 6 第2组总体区间置信度更新过程
Table 6 The overall interval confidence update process for the second set of data
总体区间置信度 $H_1$ $H_2$ $H_3$ $\left[ {\min \beta _n ,\max \beta _n } \right]_1$ $\left[ {0,0} \right]$ $\left[ {0.7093,0.7619} \right]$ $\left[ {0.2381,0.2907} \right]$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\left[ {\min \beta _n ,\max \beta _n } \right]_{100}$ $\left[ {0,0} \right]$ $\left[ {0.6837,0.7156} \right]$ $\left[ {0.2844,0.3163} \right]$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\left[ {\min \beta _n ,\max \beta _n } \right]_{280}$ $\left[ {0,0} \right]$ $\left[ {0.6466,0.7402} \right]$ $\left[ {0.2598,0.3534} \right]$
下载: 导出CSV
-
[1] 蒋栋年, 李炜. 基于数据驱动残差评价策略的故障检测方法. 控制与决策, 2017, 32(7): 1181−1188Jiang Dong-Nian, Li Wei. Fault detection method based on data-driven residual evaluation strategy. Control and Decision, 2017, 32(7): 1181−1188 [2] 文成林, 吕菲亚, 包哲静, 刘妹琴. 基于数据驱动的微小故障诊断方法综述. 自动化学报, 2016, 42(9): 1285−1299Wen Cheng-Lin, Lv Fei-Ya, Bao Zhe-Jing, Liu Mei-Qin. A review of data driven-based incipient fault diagnosis. Acta Automatica Sinica, 2016, 42(9): 1285−1299 [3] 王易南, 陈康, 闫杰. 三捷联惯组冗余系统故障检测阈值设计方法. 固体火箭技术, 2014, (4): 458−462Wang Yi-Nan, Chen Kang, Yan Jie. Dynamic threshold design for fault detection of the redundant strap-down inertial navigation system. Journal of Solid Rocket Technology, 2014, (4): 458−462 [4] Jiang R Y. Optimization of alarm threshold and sequential inspection scheme. Reliability Engineering and System Safety, 2010, 95(3): 208−215 [5] Zhu H W, Wang K C, Chen Q Z. Adaptive thresholds algorithm for fault detection of liquid rocket engine in ground test. Journal of Propulsion Technology, 2000, 21(1): 1−4 [6] Wang C, Qiu Z P, Xu M, H, Qiu H C. Novel fuzzy reliability analysis for heat transfer system based on interval ranking method. International Journal of Thermal Sciences, 2017, 116: 234−241 doi: 10.1016/j.ijthermalsci.2017.02.016 [7] Mezache A, Soltani F. A novel threshold optimization of ML-CFAR detector in Weibull clutter using fuzzy-neural networks. Signal Processing, 2007, 87(9): 2100−2110 doi: 10.1016/j.sigpro.2007.02.007 [8] 霍瑛, 庄毅, 薛羽. 基于群体一致性强度的模糊评估方法. 控制与决策, 2014, (1): 153−157Huo Ying, Zhuang Yi, Xue Yu. Method of fuzzy evaluation based on group consistency intensity. Control and Decision, 2014, (1): 153−157 [9] Zhou Z J, Yang J B, Hu C H, Xu D L. Belief rule base expert system and complex system modeling. Science Press, 2011: 15−20 [10] 徐晓滨, 张镇, 李世宝, 文成林. 基于诊断证据静态融合与动态更新的故障诊断方法. 自动化学报, 2016, 42(1): 107−121Xu Xiao-Bin, Zhang Zhen, Li Shi-Bao, Wen Cheng-Lin. Fault diagnosis based on fusion and updating of diagnosis evidence. Acta Automatica Sinica, 2016, 42(1): 107−121 [11] 赵福均, 周志杰, 胡昌华, 常雷雷, 王力. 基于证据推理的动态系统安全性在线评估方法. 自动化学报, 2017, 43(11): 1950−1961Zhao Fu-Jun, Zhou Zhi-Jie, Hu Chang-Hua, Chang Lei-Lei, Wang Li. Online safety assessment method based on evidential reasoning for dynamic systems. Acta Automatica Sinica, 2017, 43(11): 1950−1961 [12] Xu D L, Wang Y M. The evidential reasoning approach for multi-attribute decision analysis under interval uncertainty. European Journal of Operational Research, 2006, 175(1): 35−66 doi: 10.1016/j.ejor.2005.03.034 [13] Zhao F J, Zhou Z J, Hu C H, Chang L L, Zhou Z G, Li G L. A new evidential reasoning-based method for online safety assessment of complex systems. IEEE Transactions on Systems, Man, and Cybernetics Systems, 2018, 48(6): 954−966 [14] He W, Liu L C, Yang J P. Reliability analysis of stiffened tank-roof stability with multiple random variables using minimum distance and Lagrange methods. Engineering Failure Analysis, 2013, 32(3): 304−311 [15] Li G L, Zhou Z J, Hu C H, Chang L L, Zhou Z G, Zhao F J. A new safety assessment model for complex system based on the conditional generalized minimum variance and the belief rule base. Safety Science, 2017, 93: 108−120 doi: 10.1016/j.ssci.2016.11.011 [16] Feng Z C, Zhou Z J, Hu C H, Yin X J, Hu G Y, Zhao F J. Fault diagnosis based on belief rule base with considering attribute correlation. IEEE Access, 2018: 2055−2067 [17] Yang J B, Singh M G. An evidential reasoning approach for multiple-attribute decision making with uncertainty. IEEE Transactions on Systems, Man, and Cybernetics, 1994, 24(1): 1−18 [18] Zhou Z J, Hu G Y, Zhang B C, Hu C H, Zhou Z G, Qiao P L. A model for hidden behavior prediction of complex systems based on belief rule base and power set. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2018, 48(9): 1649−1655 [19] Xu D L, Liu J, Yang J B, Liu G P, Wang J, Jenkinson L, Ren J. Inference and learning methodology of belief-rule-based expert system for pipeline leak detection. Expert Systems with Applications, 2007, 32(1): 103−113 doi: 10.1016/j.eswa.2005.11.015 -

 下载:
下载:



计量
- 文章访问数: 1582
- HTML全文浏览量: 385
- PDF下载量: 292
- 被引次数: 0
