

Tracking and Anti-sway Control for Double-pendulum Rotary Cranes Using Novel Sliding Mode Algorithm
-
摘要: 本文针对旋转起重机系统中旋臂定位和两级摆动抑制问题,提出一种含有非线性滑模面的滑模控制算法.不同于传统的线性滑模面,非线性滑模面可以使闭环系统的阻尼比从开始的较小值变化为最终的较大值.较小的阻尼比可以为系统提供较快的响应速度而较大的阻尼比则可减小超调量从而使得旋臂更加精确地跟踪给定轨迹.通过李雅普诺夫定理验证系统稳定性.比较仿真结果表明,该方法在实现摆角抑制的同时,起伏角和旋转角的跟踪误差分别降低了大约40%和52%.Abstract: This paper proposes a novel sliding mode controller with nonlinear sliding surface for achieving both high-precision tracking control and double-pendulum load sway suppression. Unlike the traditional linear sliding surface, the nonlinear one can change the damping ratio of the closed-loop system from its initial low value to final high value. The low value can provide a quick response whereas the high one can eliminate overshoot to make boom track the given trajectory more precisely. The stability of the whole system is proven by the Lyapunov technique. Comparative simulations indicate that the tracking error for vertical and horizontal boom motions can be reduced about 40% and 52%, respectively, the double-pendulum load sways can be suppressed as well.
-
Key words:
- Rotary crane /
- double-pendulum effect /
- tracking control /
- anti-sway control /
- nonlinear sliding surface
1) 本文责任编委 穆朝絮 -
表 1 起重机系统模型参数
Table 1 Parameters of crane system
$M_0$ (kg) $m_1$ (kg) $m_2$ (kg) $L$ (m) $l_{1}$ (m) $l_{2}$ (m) $J_5$ (kg${\rm{m}}^{2}$) $J_6$ (kg${\rm{m}}^{2}$) $g$ (m/${\rm{s}}^{2}$) 0.86 2.00 0.56 0.65 0.50 0.20 0.52 0.52 9.80  下载: 导出CSV
下载: 导出CSV
表 2 起伏子系统控制器参数
Table 2 Parameters of controller in vertical subsystem
$\Gamma_1$ $P_1$ $K_1$ $Q_1$ $\lambda_{i1}$ NLSS ${\rm{diag}}\{1.0, 1.0, 0.5\}$ ${\rm{diag}}\{1.0, 1.0, 1.4\}$ ${\rm{diag}}\{0.5, 0.5, 0.8\}$ ${\rm{diag}}\{1.0, 1.0, 1.5\}$ ${\rm{diag}}\{1.2, 1.5, 0.7\}$ LSS ${\rm{diag}}\{1.0, 1.0, 0.5\}$ ${\rm{diag}}\{1.0, 1.0, 1.4\}$ ${\rm{diag}}\{0.5, 0.5, 0.8\}$ ${\rm{diag}}\{1.0, 1.0, 1.5\}$ —
下载: 导出CSV
表 3 旋转子系统控制器参数
Table 3 Parameters of controller in horizontal subsystem
$\Gamma_2$ $P_2$ $K_2$ $Q_2$ $\lambda_{i2}$ NLSS ${\rm{diag}}\{1.0, 1.0, 1.5\}$ ${\rm{diag}}\{1.0, 1.0, 1.4\}$ ${\rm{diag}}\{0.5, 0.5, 0.9\}$ ${\rm{diag}}\{1.0, 1.0, 1.4\}$ ${\rm{diag}}\{1.2, 1.5, 0.8\}$ LSS ${\rm{diag}}\{1.0, 1.0, 1.5\}$ ${\rm{diag}}\{1.0, 1.0, 1.4\}$ ${\rm{diag}}\{0.5, 0.5, 0.9\}$ ${\rm{diag}}\{1.0, 1.0, 1.4\}$ —
下载: 导出CSV
表 4 定量分析($l_2=0.1$ m)
Table 4 Quantitative analysis ($l_2=0.1$ m)
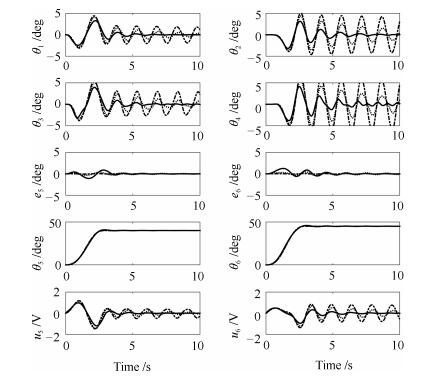
最大起伏角误差 最大旋转角误差 最大摆角 最大摆角 最大摆角 最大摆角 $e_{5\max}$ (deg) $e_{6\max}$ (deg) $\theta_{1\max}$ (deg) $\theta_{2\max}$ (deg) $\theta_{3\max}$ (deg) $\theta_{4\max}$ (deg) NLSS 1.21 1.91 2.91 2.75 3.15 3.21 LSS 1.68 2.91 2.77 2.81 3.11 3.18
下载: 导出CSV
表 5 定量分析($l_2=0.2$ m)
Table 5 Quantitative analysis ($l_2=0.2$ m)
最大起伏角误差 最大旋转角误差 最大摆角 最大摆角 最大摆角 最大摆角 $e_{5\max}$ (deg) $e_{6\max}$ (deg) $\theta_{1\max}$ (deg) $\theta_{2\max}$ (deg) $\theta_{3\max}$ (deg) $\theta_{4\max}$ (deg) NLSS 1.21 1.81 3.03 2.94 3.69 4.21 LSS 1.61 2.81 2.79 2.83 3.41 4.11
下载: 导出CSV
表 6 定量分析($l_2=0.3$ m)
Table 6 Quantitative analysis ($l_2=0.3$ m)
最大起伏角误差 最大旋转角误差 最大摆角 最大摆角 最大摆角 最大摆角 $e_{5\max}$ (deg) $e_{6\max}$ (deg) $\theta_{1\max}$ (deg) $\theta_{2\max} $(deg) $\theta_{3\max}$ (deg) $\theta_{4\max}$ (deg) NLSS 1.41 1.99 2.93 2.94 2.93 5.22 LSS 1.81 2.99 2.52 2.92 4.27 5.02
下载: 导出CSV
-
[1] Maghsoudi M J, Mohamed Z, Husaina A R, Tokhib M O. An optimal performance control scheme for a 3D crane. Mechanical Systems and Signal Processing, 2016, 66-67:756-768 doi: 10.1016/j.ymssp.2015.05.020 [2] Potter J, Singhose W. Design and human-in-the-loop testing of reduced-modification input shapers. IEEE Transactions on Control Systems Technology, 2016, 24(4):1513-1520 doi: 10.1109/TCST.2015.2487858 [3] Xie X, Huang J, Liang Z. Vibration reduction for flexible systems by command smoothing. IEEE Transactions on Control Systems Technology, 2013, 39:461-470 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=022322f5c67e80b331d616a11059df70 [4] Hoang N Q, Lee S G, Kim H, Moon S C. Trajectory planning for overhead crane by trolley acceleration shaping. Journal of Mechanical Science and Technology, 2014, 28(7):2877-2886 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=25ddd6dd7c0f5f8980318d0c78b126ee [5] Zhang X, Fang Y, Sun N. Minimum-time trajectory planning for underactuated overhead crane systems with state and control constraints. IEEE Transactions on Industrial Electronics, 2014, 61(12):6915-6925 doi: 10.1109/TIE.2014.2320231 [6] Sun N, Fang Y. An efficient online trajectory generating method for underactuated crane systems. International Journal of Robust and Nonlinear Control, 2014, 24(11):1653-1663 doi: 10.1002/rnc.v24.11 [7] Hilhorst G, Pipeleers G, Michiels W, Oliveira R C L F, Peres P L D, Swevers J. Fixed-order linear parameter-varying feedback control of a lab-scale overhead crane. IEEE Transactions on Control Systems Technology, 2016, 24(5):1899-1907 doi: 10.1109/TCST.2016.2535260 [8] Chen H, Fang Y, Sun N. A swing constraint guaranteed MPC algorithm for underactuated overhead canes. IEEE/ASME Transactions on Mechatronics, 2016, 21(5):2543-2555 doi: 10.1109/TMECH.2016.2558202 [9] Sun N, Fang Y, Chen H, He B. Adaptive nonlinear crane control with load hoisting/lowering and unknown parameters:design and experiments. IEEE/ASME Transactions on Mechatronics, 2015, 20(5):2107-2119 doi: 10.1109/TMECH.2014.2364308 [10] Ouyang H, Hu J, Zhang G M, Mei L, Deng X. Sliding-mode-based trajectory tracking and load sway suppression control for double-pendulum overhead cranes. IEEE Access, 2019, 7:4371-4379 doi: 10.1109/ACCESS.2018.2888563 [11] Ouyang H, Wang J, Zhang G M, Mei L, Deng X. Novel adaptive hierarchical sliding mode control for trajectory tracking and load sway rejection in double-pendulum overhead cranes. IEEE Access, 2019, 7:10353-10361 doi: 10.1109/Access.6287639 [12] Tuan L A, Lee S G, Ko D H, Nho L C. Combined control with sliding mode and partial feedback linearization for 3D overhead cranes. International Journal of Robust and Nonlinear Control, 2014, 24(18):3372-3386 doi: 10.1002/rnc.v24.18 [13] Sun N, Fang Y C, Chen H, Fu Y M. Nonlinear stabilizing control for ship-mounted cranes with ship roll and heave movements:design, analysis, and experiments. IEEE Transactions on Systems, Man, Cybernetics:Systems, 2018, 48(10):1781-1793 doi: 10.1109/TSMC.2017.2700393 [14] Sun N, Yang T, Chen H, Fang Y C. Adaptive anti-swing and positioning control for 4-DOF rotary cranes subject to uncertain/unknown parameters with hardware experiments. IEEE Transactions on Systems, Man, Cybernetics:Systems, 2017, DOI: 10.1109/TSMC.2017.2765183 [15] 王伟, 易建强, 赵冬斌, 刘殿通.桥式吊车系统的分级滑模控制方法.自动化学报, 2004, 30(5):784-788 http://d.old.wanfangdata.com.cn/Periodical/zdhxb200405018Wang Wei, Yi Jian-Qiang, Zhao Dong-Bin, Liu Dian-Tong. Hierarchical sliding-mode control method for overhead cranes. Acta Automatica Sinica, 2004, 30(5):784-788 http://d.old.wanfangdata.com.cn/Periodical/zdhxb200405018 [16] 胡洲, 王志胜, 甄子洋.带输入饱和的欠驱动吊车非线性信息融合控制.自动化学报, 2014, 40(7):1522-1527 http://d.old.wanfangdata.com.cn/Periodical/zdhxb201407026Hu Zhou, Wang Zhi-Sheng, Zhen Zi-Yang. Nonlinear information fusion control for underactuated cranes with input saturation. Acta Automatica Sinica, 2014, 40(7):1522-1527 http://d.old.wanfangdata.com.cn/Periodical/zdhxb201407026 [17] Uchiyama N, Ouyang H, Sano S. Simple rotary crane dynamics modeling and open-loop control for residual load sway suppression by only horizontal boom motion. Mechatronics, 2013, 23(8):1223-1236 doi: 10.1016/j.mechatronics.2013.09.001 [18] 孙宁, 方勇纯, 王鹏程, 张雪波.欠驱动三维桥式吊车系统自适应跟踪控制器设计.自动化学报, 2010, 36(9):1287-1294 http://www.aas.net.cn/CN/abstract/abstract17322.shtmlSun Ning, Fang Yong-Chun, Wang Peng-Cheng, Zhang Xue-Bo. Adaptive trajectory tracking control of underactuated 3-dimensional overhead crane systems. Acta Automatica Sinica, 2010, 36(9):1287-1294 http://www.aas.net.cn/CN/abstract/abstract17322.shtml [19] Tuan L A, Lee S G, Dang V H, Moon S C, Kim B S. Partial feedback linearization control of a three-dimensional overhead crane. International Journal of Control, Automation and Systems, 2013, 11(4):718-727 doi: 10.1007/s12555-012-9305-z [20] Tang R, Huang J. Control of bridge cranes with distributed-mass payloads under windy conditions. Mechanical Systems and Signal Processing, 2016, 72-73:409-419 doi: 10.1016/j.ymssp.2015.11.002 [21] 陈鹤, 方勇纯, 孙宁, 钱彧哲.基于伪谱法的双摆吊车时间最优消摆轨迹规划策略.自动化学报, 2016, 42(1):153-160 http://www.aas.net.cn/CN/abstract/abstract18805.shtmlChen He, Fang Yong-Chun, Sun Ning, Qian Yu-Zhe. Pseudospectral method based time optimal anti-swing trajectory planning for double pendulum crane systems. Acta Automatica Sinica, 2016, 42(1):153-160 http://www.aas.net.cn/CN/abstract/abstract18805.shtml [22] Zhang M, Ma X, Chai H, Rong X W, Tian X C, Li Y B. A novel online motion planning method for double-pendulum overhead cranes. Nonlinear Dynamics, 2016, 85(2):1079-1090 doi: 10.1007/s11071-016-2745-x [23] Huang J, Liang Z, Zang Q. Dynamics and swing control of double-pendulum bridge cranes with distributed-mass beams. Mechanical Systems and Signal Processing, 2015, 54-55:357-366 doi: 10.1016/j.ymssp.2014.09.005 [24] 孙宁, 方勇纯, 钱彧哲.带有状态约束的双摆效应吊车轨迹规划.控制理论与控制应用, 2014, 31(7):974-980 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201407018Sun Ning, Fang Yong-Chun, Qian Yu-Zhe. Motion planning for cranes with double pendulum effects subject to state constraints. Control Theory and Applications, 2014, 31(7):974-980 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201407018 [25] Masoud Z N, Alhazzal K A. Frequency-modulation input shaping control of double-pendulum overhead cranes. Transactions of the ASME, Journal of Dynamic Systems, Measurement, and Control, 2014, 136:021005 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=1c909335aeec44622af28313ceee7015 [26] Maleki E, Singhose W. Swing dynamics and input-shaping control of human-operated double-pendulum boom cranes. Transactions of the ASME, Journal of Computational and Nonlinear Dynamics, 2012, 7(3):031006 doi: 10.1115/1.4005933 [27] Masoud Z N, Alhazzal K A, et al. A hybrid command-shaper for double-pendulum overhead cranes. Journal of Vibration and Control, 2012, 20(1):24-37 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1177/1077546312461371 [28] Manning R, Clement J, Kim D, Singhose W E. Dynamics and control of bridge cranes transporting distributed-mass payloads. Transactions of the ASME, Journal of Computational and Nonlinear Dynamics, 2010, 132(1):014505 [29] Sung Y G, Singhose W. Robustness analysis of input shaping commands for two-mode flexible systems. IET Control Theory and Applications, 2009, 3(6):722-730 doi: 10.1049/iet-cta.2007.0328 [30] Qian D, Tong S, Lee S G. Fuzzy-logic-based control of payloads subjected to double-pendulum motion in overhead cranes. Automation in Construction, 2016, 65:133-134 doi: 10.1016/j.autcon.2015.12.014 [31] Ouyang H M, Deng X, Xi H, Hu J X. Novel robust controller design for load sway reduction in double-pendulum overhead cranes. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2019, 233(12), 4359-4371 doi: 10.1177/0954406218813383 [32] Zhang M H, Ma X. Rong X W, Tian X C, Li Y B. Adaptive tracking control for double-pendulum overhead cranes subject to tracking error limitation, parametric uncertainties and external disturbances. Mechanical Systems and Signal Processing, 2016, 76-77:15-32 doi: 10.1016/j.ymssp.2016.02.013 [33] Tuan L A, Lee S G. Sliding mode controls of double-pendulum crane systems. Journal of Mechanical Science and Technology, 2013, 27(6):1863-1873 doi: 10.1007/s12206-013-0437-8 [34] Sun N, Yang T, Fang Y C, Wu Y M. Transportation control of double-pendulum cranes with a nonlinear quasi-PID scheme:design and experiments. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2018, DOI: 10.1109/TSMC.2018.2871627 [35] Sun N, Wu Y M, Fang Y C, Chen H. Nonlinear antiswing control for crane systems with double-pendulum swing effects and uncertain parameters:design and experiments. IEEE Transactions on Automation Science and Engineering, 2018, 15(3):1413-1422 doi: 10.1109/TASE.2017.2723539 [36] Khalick M, Uchiyama N, Sano S. Sliding mode contouring control design using nonlinear sliding surface for three-dimensional machining. International Journal of Machine Tools and Manufacture 2013, 65:8-14 doi: 10.1016/j.ijmachtools.2012.07.004 [37] Kempf C F, Kobayashi S. Disturbance observer and feedforward design for a high-speed direct-drive positioning table. IEEE Transactions on Control Systems Technology, 1999, 7(5):513-526 doi: 10.1109/87.784416 [38] Kobayashi H, Katusra S, Ohnishi K. An analysis of parameter variations of disturbance observer for motion control. IEEE Transactions on Industrial Electronics, 2007, 54(6):3413-3421 doi: 10.1109/TIE.2007.905948 [39] Maeta Y, Iwasaki M. Initial friction compensation by disturbance observer based on rolling friction model. IEEJ Transactions on Sensors and Micromachines, 2009, 130(2):3124-3129 [40] Ouyang H, Hu J Zhang G M, Mei L, Deng X. Decoupled linear model and S-shaped curve motion trajectory for load sway reduction control in overhead cranes with double-pendulum effect. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science 2019, 233(10), 3678-3689 doi: 10.1177/0954406218819029 [41] Shtessel Y, Edwards C, Fridman L, Levant A. Sliding Mode Control and Observation. New York, NY, USA: Birkhäuser, 2014. -

 下载:
下载:

计量
- 文章访问数: 3021
- HTML全文浏览量: 466
- PDF下载量: 527
- 被引次数: 0
