

-
摘要: 针对挠性航天器系统中同时存在单框架控制力矩陀螺群(Single gimbaled control moment gyroscopes, SGCMGs) 摩擦非线性、电磁干扰力矩、惯量摄动以及外部干扰等问题, 提出了一种有限时间自适应鲁棒控制(Finite-time adaptive robust control, FTARC) 方法. 针对系统中存在未知参数的情况, 分别设计自适应更新律, 使得控制器的设计不依赖参数信息, 同时减小外部干扰对系统的不利影响. 应用Lyapunov稳定性理论证明了闭环系统姿态角误差和姿态角速度误差可在有限时间内收敛到原点附近的邻域内. 仿真结果表明, 所提控制律可实现挠性航天器姿态快速机动, 并获得甚高指向精度.
-
关键词:
- 单框架控制力矩陀螺群 /
- 挠性航天器 /
- 有限时间自适应鲁棒控制 /
- 不确定性
Abstract: A flnite-time adaptive robust attitude controller is proposed for the flexible spacecraft, in which the friction nonlinearity and electromagnetic disturbance in the single gimbaled control moment gyroscopes (SGCMGs), inertia perturbation and external disturbance exist. Adaptive laws are designed to cope with the unknown parameters and the controller can be designed, regardless of the information of the parameters. The adverse efiect of external disturbance on the system is reduced. By means of Lyapunov stability theory, it has been proved that the error of the attitude angle and attitude angular velocity can converge to a small neighborhood containing origin. The simulation results show that, with the presented controller, the fast attitude maneuver with high precision can be achieved.-
Key words:
- Single gimbaled control moment gyroscopes (SGCMGs) /
- flexible spacecraft /
- flnite-time adaptive robust control (FTARC) /
- uncertainties
1) 本文责任编委 倪茂林 -

图 1 SGCMGs驱动的挠性航天器姿态控制系统结构图
Fig. 1 Structure diagram of attitude control system for SGCMGs-based flexible spacecraft
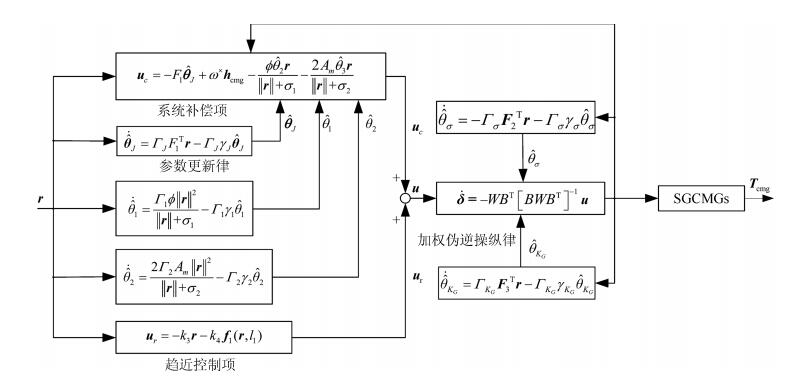
图 2 基于SGCMGs的挠性航天器有限时间自适应鲁棒控制器结构图
Fig. 2 Structure diagram of flnite-time adaptive robust control for SGCMGs-based flexible spacecraft
表 1 LuGre摩擦模型参数、控制律及操纵律参数
Table 1 Parameters of LuGre friction model, control law and steering law
参数类型 参数值 LuGre摩擦模型参数及前馈环路增益 $\sigma_1 = 0.3\, \rm{Nm}$, $\sigma_2 = 0.5\, \rm{Nm}$, $\sigma_3 = 0.06\, \rm{Nm}\cdot \rm{s/rad}$, $F_ \rm{c} = 0.1\, \rm{Nm}$, $F_ \rm{s} = 0.12\, \rm{Nm}$, $V_ \rm{s} = 0.001\, \rm{rad/s}$, $K_G = 0.2$ 控制律参数 $k_1 = 2.5$, $k_2 = 0.1$, $k_3 = 500$, $k_4 = 0.1$, $g = 11, h = 13, g_1 = 7, h_1 = 9$, $\mu_a = \mu_b = 0.001$, $\gamma_J = 0.001, \gamma_{K_G} = \gamma_\sigma = \gamma_1 = \gamma_2 = 2$, $[\varGamma_J\; \varGamma_\sigma\; \varGamma_{K_G}\; \varGamma_1\; \varGamma_2]^{{\rm T}} = [1\; 0.1\; 0.01\; 1\; 0.001]^{{\rm T}}$ 操纵律参数 $W_i = i$ $(i = 1, 2, 3, 4)$, $\omega_0 = 1$, $\epsilon_0 = 10^{-4}$, $k_0 = 10$, $\alpha_0 = 10^{-5}$, $h_a = 100$  下载: 导出CSV
下载: 导出CSV
-
[1] Du H B, Li S H. Attitude synchronization for flexible spacecraft with communication delays. IEEE Transactions on Automatic Control, 2016, 61(11): 3625-3630 doi: 10.1109/TAC.2016.2525933 [2] Zhong C X, Chen Z Y, Guo Y. Attitude control for flexible spacecraft with disturbance rejection. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(1): 101-110 doi: 10.1109/TAES.2017.2649259 [3] Zhong C X, Guo Y, Yu Z, Wang L, Chen Q W. Finite-time attitude control for flexible spacecraft with unknown bounded disturbance. Transactions of the Institute of Measurement and Control, 2016, 38(2): 240-249 doi: 10.1177/0142331214566223 [4] Zhong C X, Wu L P, Guo J, Guo Y, Chen Z Y. Robust adaptive attitude manoeuvre control with finite-time convergence for a flexible spacecraft. Transactions of the Institute of Measurement and Control, 2016, 40(2): 425-435 http://smartsearch.nstl.gov.cn/paper_detail.html?id=69175779e799cf0d6c7cf1ac0934dc26 [5] 刘宝玉, 金磊, 贾英宏. 谐波齿轮对大型SGCMG框架转速控制的影响分析. 航天控制, 2014, 32(2): 23-28, 34 doi: 10.3969/j.issn.1006-3242.2014.02.005Liu Bao-Yu, Jin Lei, Jia Ying-Hong. Influence analysis of harmonic gear to SGCMG gimbal rate control. Aerospace Control, 2014, 32(2): 23-28, 34 doi: 10.3969/j.issn.1006-3242.2014.02.005 [6] 吴忠, 吴宏鑫. SGCMG框架伺服系统扰动力矩的分析与抑制. 航天控制, 1998, 16(4): 8-16 https://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ199804001.htmWu Zhong, Wu Hong-Xin. Analysis and attenuation of disturbance torque in SGCMG gimbal servo systems. Aerospace Control, 1998, 16(4): 8-16 https://www.cnki.com.cn/Article/CJFDTOTAL-HTKZ199804001.htm [7] 鲁明, 张欣, 李耀华. SGCMG框架伺服系统扰动力矩分析与控制. 中国空间科学技术, 2013, 33(1): 15-20 https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201301002.htmLu Ming, Zhang Xin, Li Yao-Hua. Analysis and control for SGCMG gimbal servo system disturbance torque. Chinese Space Science and Technology, 2013, 33(1): 15-20 https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201301002.htm [8] 金磊, 徐世杰. SGCMG框架伺服系统动力学建模与低速控制. 中国空间科学技术, 2010, (6): 1-10 https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201006003.htmJin Lei, Xu Shi-Jie. Dynamic modelling and low-speed control for SGCMG gimbal servo system. Chinese Space Science and Technology, 2010, (6): 1-10 https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201006003.htm [9] Hill D. Dynamics and control of spacecraft using control moment gyros with friction compensation. Journal of Guidance, Control, and Dynamics, 2016, 39(10): 2406-2418 doi: 10.2514/1.G001585 [10] MacKunis W, Dupree K, Fitz-Coy N, Dixon W E. Adaptive satellite attitude control in the presence of inertia and CMG gimbal friction uncertainties. The Journal of the Astronautical Sciences, 2008, 56(1): 121-134 doi: 10.1007/BF03256544 [11] 田林, 徐世杰. 带变速控制力矩陀螺的航天器自适应姿态控制. 中国空间科学技术, 2012, 32(5): 9-16 https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201205004.htmTian Lin, Xu Shi-Jie. Adaptive attitude control of spacecraft with variable speed control moment gyroscopes. Chinese Space Science and Technology, 2012, 32(5): 9-16 https://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201205004.htm [12] Wang L, Zhong C X, Guo Y, Wu Y F, Guo J. Robust adaptive attitude control for flexible spacecraft in the presence of SGCMG friction nonlinearity. International Journal of Robust and Nonlinear Control, 2018, 28(9): 3324-3341 doi: 10.1002/rnc.4079 [13] Cao X B, Wu B L. Indirect adaptive control for attitude tracking of spacecraft with unknown reaction wheel friction. Aerospace Science and Technology, 2015, 47: 493-500 doi: 10.1016/j.ast.2015.10.017 [14] 李冬柏, 吴宝林, 张迎春. 考虑未知飞轮摩擦力矩的航天器姿态跟踪鲁棒自适应控制. 宇航学报, 2016, 37(2): 175-181 https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201602007.htmLi Dong-Bai, Wu Bao-Lin, Zhang Ying-Chun. Robust adaptive control for spacecraft attitude tracking with unknown friction torque of reaction wheel. Journal of Astronautics, 2016, 37(2): 175-181 https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201602007.htm [15] Niu G, Hu Q. Robust finite-time observer design for rigid spacecraft with reaction wheel friction. In: Proceedings of the 35th Chinese Control Conference. Chengdu, China: IEEE, 2016. 10679-10683 [16] Heiberg C J, Bailey D, Wie B. Precision spacecraft pointing using single-gimbal control moment gyroscopes with disturbance. Journal of Guidance Control and Dynamics, 2000, 23(1): 77-85 doi: 10.2514/2.4489 [17] MacKunis W, Leve F, Patre P M, Fitz-Coy N, Dixon W E. Adaptive neural network-based satellite attitude control in the presence of CMG uncertainty. Aerospace Science and Technology, 2016, 54: 218-228 doi: 10.1016/j.ast.2016.04.022 [18] Hughes P C. Spacecraft Attitude Dynamics. New York: Courier Dover Publications, 2012. 93-129 [19] Wie B. New singularity escape/avoidance steering logic for control moment gyro systems. Journal of Guidance, Control, and Dynamics, 2005, 28(5): 948-956 doi: 10.2514/1.10136 [20] De Wit C C, Olsson H, Astrom K J, Lischinsky P. A new model for control of systems with friction. IEEE Transactions on Automatic Control, 1995, 40(3): 419-425 doi: 10.1109/9.376053 [21] De Wit C C, Lischinsky P. Adaptive friction compensation with partially known dynamic friction model. International Journal of Adaptive Control and Signal Processing, 1997, 11(1): 65-80 doi: 10.1002/(SICI)1099-1115(199702)11:1%3C65::AID-ACS395%3E3.0.CO;2-3/abstract [22] Sidi M J. Spacecraft Dynamics and Control: A Practical Engineering Approach. Cambridge: Cambridge University Press, 1997. [23] Ma Y, Jiang B, Tao G, Cheng Y H. Uncertainty decomposition-based fault-tolerant adaptive control of flexible spacecraft. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(2): 1053-1068 http://smartsearch.nstl.gov.cn/paper_detail.html?id=711cece5fac30dddb4cb6cdbe14ba907 [24] Hardy G H, Littlewood J E, Pólya G. Inequalities. Cambridge: Cambridge University Press, 1952. [25] Zhu Z, Xia Y Q, Fu M Y. Attitude stabilization of rigid spacecraft with finite-time convergence. International Journal of Robust and Nonlinear Control, 2011, 21(6): 686-702 doi: 10.1002/rnc.1624 [26] Zou A M, Kumar K D, Ruiter A H J. Robust attitude tracking control of spacecraft under control input magnitude and rate saturations. International Journal of Robust and Nonlinear Control, 2015, 26(4): 799-815 doi: 10.1002/rnc.3338 [27] Gennaro S D. Output stabilization of flexible spacecraft with active vibration suppression. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 747-759 http://ieeexplore.ieee.org/document/1238733/references [28] Guo Y, Zhou C F, Yu Z, Chen Q W. Study on attitude control for move-to-rest manoeuvre of flexible spacecraft. International Journal of Modelling, Identification and Control, 2013, 19(1): 23-31 http://www.ingentaconnect.com/content/rsoc/17466172/2013/00000019/00000001/art00003 -

 下载:
下载:


图(8) / 表(1)
计量
- 文章访问数: 1013
- HTML全文浏览量: 320
- PDF下载量: 206
- 被引次数: 0
