

-
摘要: 风能是目前世界上装机量较大的可再生能源之一,风力发电预测的精度直接影响电网的调度与安全运营.由于电网的调度策略存在多个时间点,并与涉及的地域范围有关,本文从多种时间和空间尺度的角度,综述风力发电预测方法.风力发电预测一般针对特定的空间范围和时间尺度,并在有限信息资源的条件下完成,故本文从上述三个方面综述已有研究成果.本文首先根据风力发电空间范围,从单台风力发电机、单一风电场以及风电场群三个空间尺度对研究成果进行梳理.其次在每个空间尺度上,根据风电预测是否使用气象信息将研究成果分类,并根据预测时间尺度将研究成果再次分类.最后在每个时间尺度上,根据风电预测存在的挑战,将已有的研究成果归类.通过上述梳理,本文希望可以帮助研究人员找到适合不同风电预测任务场景的方法.Abstract: Wind power is one of the most installed renewable energy resources in the world, and the accuracy of wind power forecasting method directly affects dispatching and operation safety of the power grid. Since scheduling strategy of the power grid has multiple points and is relative to the geographical scope, this paper summarizes wind power forecasting methods from multi-temporal and multi-spatial perspective. Wind power forecasting usually focuses on specific spatial scale and temporal scale, and is finished with limited information, so this paper classifies researches from three aspects above. Firstly, this paper separates existing wind power forecasting methods into three spatial scales, namely a single wind turbine, a wind farm and a group of wind farms. In each spatial scale, we classify methods by whether using meteorological information, and afterwards by temporal scales. Lastly, in each temporal scale, we also summarize the challenges and achievements. This paper wishes researchers would find suitable methodology when dealing with different wind power forecasting tasks.
-
Key words:
- Multi-scale /
- wind power /
- forecasting method /
- temporal scale /
- spatial scale
-
近年来, 轮式移动方式以其高效率、高能量利用率引起了腿足式机器人研究者的广泛关注[1]. 试图搭建腿轮构型机器人, 将腿式机器人的高越障能力与轮式运行方式的快速移动能力相结合. 因此, 双腿轮机器人、四腿轮机器人等平台应运而生[2]. 其中, 双腿轮机器人具有更加灵活的移动与转向性能, 在多种行业工况下具有广阔的应用前景[3].
为使双腿轮机器人的地形适应能力进一步提高, 面临较高垂直障碍时, 可采用跳跃形式快速跨越. 苏黎世理工大学研发的双腿轮机器人Accento[4-5]在基于线性二次调节器(Linear quadratic regulator, LQR)平衡控制器的基础上进行跳跃控制器的设计, 实现了跳跃运动, 收到了显著的效果. 美国波士顿动力公司研发的Handle双腿轮机器人[6]实现了快速加减速、跳跃、搬运重物等功能, 展现了良好的动态平衡能力. 如何构建一个可以将运动与平衡功能集于一体的具有扩展性的双腿轮控制框架, 成为一个亟待解决的问题. 但是, 双腿轮机器人系统为内在不稳定系统, 且具有欠驱动特性, 运动过程中不存在稳定平衡点, 因此需要借助复杂的控制算法使其保持动态平衡. 而针对该系统的高动态运动控制研究尚处于起步阶段.
移动机器人经过半个世纪的发展, 基于静态稳定的控制算法已成熟, 主要应用对象包括双足机器人[7]、四足机器人[8]、六足机器人[9]等, 该类算法在保证机器人静态稳定裕度的前提下进行位置控制, 实现期望运动, 其依据为ZMP (Zero moment point)[10]、ESM (Energy stability margin)[11]、NESM (Normalized ESM)[12]等静态稳定判据, 因此无法实现高动态运动控制. 而双腿轮机器人的支撑面为两轮与地面接触点的连线, 不存在静态稳定区域, 因此静态稳定算法对于双腿轮机器人的借鉴意义不大.
双轮机器人的控制方法已渐趋成熟, 作为一个欠驱动不稳定多耦合系统, 常用于控制算法的有效性验证[13-14], 日本庆应大学搭建了两轮移动机械臂平台, 验证了基于零空间的共振比率控制器[15]、滑膜控制器[16]、非线性反步法控制器等控制轮的移动与机械臂运动的有效性; 意大利技术研究院控制双足机器人站立于两轮移动平台Segway上[17], 采用二次优化方法以质心位置与角动量为调节目标, 生成全身关节力矩, 能够保持平衡并控制平台移动. 大连理工大学团队采用模型预测控制(Model predictive control, MPC)实现了两轮移动平台的运动轨迹跟踪[18]. 以上研究都具有借鉴意义, 但与两轮移动平台不同, 双腿轮平台不再存在两轮同轴被动约束, 这也使得控制器的构造难度大大增加.
近几年来, 腿足式机器人动态控制算法成为研究热点. 得益于各种实时优化解算库[19-20]的开发, 控制中的多解问题可转化为优化问题, 得到局部甚至全局最优解[21-22]. 如美国麻省理工学院的四足机器人Mini-cheetah[23]构造了全身控制与模型预测控制相结合的控制器, 实现了4 m/s的奔跑和碎石路面行走. 双足机器人Atlas[24]跟踪采用模型预测控制器优化的参考轨迹, 实现了左右脚交替三连跳40 cm台阶、前滚翻等高动态运动.
为提高双腿轮机器人的地形适应性, 实现稳定的速度跟随与跳跃, 本文在前期研究的基础上[25], 构造了基于最优力分配的全身力矩控制器并实现了跳跃运动, 其创新点如下:
1)实现了基于优化的自平衡全身力矩控制. 该方法可自行生成同时满足平衡与期望运动的全身力矩, 不需要设计平衡控制器. 受到跳跃着陆冲击干扰时, 能够有效规划期望状态轨迹, 并恢复有界稳定.
2)提出了适用于双腿轮机器人的连续跳跃规划. 可在保证高速运动的前提下, 实现垂直障碍的跨越, 并能够在腾空阶段对俯仰姿态进行有效调整, 保证着陆姿态.
1. 运动学与动力学建模
本文的控制对象以美国HEBI Robotics公司的双腿轮机器人HEBI IGOR[26]为原型, 其简化模型如图1所示. 该机器人具有一个单刚体躯干与两条结构相同相对于躯干左右对称布置的腿轮. 躯干尺寸为$200\;{\rm{ mm}}\times300\;{\rm{ mm}}\times200\; {\rm{mm}}\; (L\times w\times h)$, 质量为40 kg. 腿轮完全伸展长度为1150 mm, 其中大腿长度(L1)为500 mm, 小腿长度(L2)为500 mm, 轮的半径(R)为150 mm. 每条腿轮布置3 个旋转关节, 所有关节都可以实现独立的力矩控制. 髋部与膝部为俯仰旋转关节, 能够实现腿部的收缩与伸展, 轮通过一个俯仰旋转关节与腿部末端相连, 从而实现机器人在三维空间中的移动.
1.1 运动学建模
双腿轮机器人为典型的动基座系统, 浮动坐标系${\Sigma _B}$固连于躯干质心处, 其在惯性系中的线速度与角速度分别描述为${}^{\boldsymbol{O}}{{\boldsymbol{v}}_{\boldsymbol{B}}}$与${}^{\boldsymbol{O}}{{\boldsymbol{\omega}} _{\boldsymbol{B}}}$. 各肢体末端均由关节、连杆与躯干相连, 因此, 肢体末端广义速度同时受到躯干动基座广义速度与各关节角速度的影响.
$$\left[ {\begin{array}{*{20}{c}} {{}^{\boldsymbol{O}}{{\boldsymbol{v}}_{i}}} \\ {{}^{\boldsymbol{O}}{{\boldsymbol{\omega}} _{i}}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {\boldsymbol{E}}&{ - {}^{\boldsymbol{O}}{{\vec {\boldsymbol{r}}}_{\boldsymbol{B}i}}} \\ {\boldsymbol{0}}&{\boldsymbol{E}} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{}^{\boldsymbol{O}}{{\boldsymbol{v}}_{\boldsymbol{B}}}} \\ {{}^{\boldsymbol{O}}{{\boldsymbol{\omega}} _{\boldsymbol{B}}}} \end{array}} \right] + {{\boldsymbol{J}}_{i}}{\dot {{\boldsymbol{q}}}_{i}}$$ (1) 其中, 本文中编号$i= 1, 2$分别代表右腿与左腿, ${}^{\boldsymbol{O}}{{\boldsymbol{v}}_{i}}$与${}^{\boldsymbol{O}}{{\boldsymbol{\omega}} _{i}}$分别为腿i末端相对于世界坐标系的速度与角速度. ${}^{\boldsymbol{O}}{\vec {\boldsymbol{r}}_{\boldsymbol{B}i}}$为由躯干坐标系到腿i末端坐标系的位矢在世界坐标系中的表示, ${{\boldsymbol{q}}_{i}}$为腿${i}$主动关节角度.
1.2 动力学建模
为便于构造分布式控制器, 采用了分布式动力学建模方法[25]. 分布式动力学模型由躯干子系统以及腿轮子系统组成. 腿轮子系统通过广义力旋量与躯干子系统形成迭代递推关系, 其广义力旋量的表示如图1所示. 躯干的动力学模型为
$${{\boldsymbol{M}}_{\boldsymbol{b}}}\left( {\boldsymbol{X}} \right)\ddot {\boldsymbol{X}}{\rm{\;+\;}}{{\boldsymbol{G}}_{\boldsymbol{b}}}\left( {\boldsymbol{X}} \right) = {{\boldsymbol{J}}^{{\rm{T}}}}{\boldsymbol{W}}$$ (2) 其中, ${\boldsymbol{X}} = {\left[ {{}^{O}{x_B}}\;\;{{}^{O}{y_B}} \;\; {{}^{O}{z_B}}\;\;\gamma \;\;\beta \;\;\alpha \right]^{\rm{T}}}$为躯干坐标系${\Sigma _B}$在大地坐标系${\Sigma _O}$中的位姿描述, ${{\boldsymbol{M}}_{\boldsymbol{b}}}$为惯性矩阵, ${{\boldsymbol{G}}_{\boldsymbol{b}}}$为重力补偿项. ${\boldsymbol{W}} = {\left[ {{\boldsymbol{W}}_{1}}\;\;{{{\boldsymbol{W}}_{2}}} \right]^{\rm{T}}}$为腿i末端施加于躯干的广义力旋量, 其中, ${{\boldsymbol{W}}_{i}} = {\left[{{f_{ix}}}\;\;{{f_{iz}}}\;\;{{n_{iy}}} \right]^{\rm{T}}}$. 支撑工况下, 腿轮施加于躯干的力旋量可作为躯干子系统的输入, 从而实现躯干子系统的控制. 由于轮式结构造成的非完整约束, 世界坐标系中躯干侧向运动(${}^{O}{\dot y_B}$)与前向运动(${}^{O}{\dot x_B}$)由躯干坐标系中x方向速度${}^B{{v}_{{B}}}$和航向角度($\alpha $)耦合而成, 基于非完整约束运动学构造矩阵${\boldsymbol{S}}$:
$${\boldsymbol{S}}\;{\rm{ = }}\left[ {\begin{array}{*{20}{c}} {\cos \alpha}&0&0&0&0 \\ {\sin \alpha }&0&0&0&0 \\ 0&1&0&0&0 \\ 0&0&1&0&0 \\ 0&0&0&1&0 \\ 0&0&0&0&1 \end{array}} \right]$$ (3) 使得${\dot{\boldsymbol X}}\;{\rm{=}}\;{\boldsymbol{S\eta}}$, 其中${\boldsymbol{\eta}}\; {\rm{=}}\;[{ {{}^B{{v}_{{B}}}}\;\;{{}^B{{\dot z}_B}}\;\;{\dot \gamma }\;\;{\dot \beta }\;\;{{\omega}}^{\rm{T}}}]$, ${{\omega}} $为航向角速度, 求导得$\ddot{\boldsymbol{X}}{\rm{ \;= \;}}{\boldsymbol{S}}\dot{\boldsymbol{\eta}} $, 因此, 式(2)中动力学模型可改写为
$${\boldsymbol{\Psi}} \dot {\boldsymbol{\eta}}\; {\rm{ + }}\;{{\boldsymbol{G}}_{\boldsymbol{b}}}\left( {\boldsymbol{X}} \right) = {{\boldsymbol{J}}^{{\rm{T}}}}{\boldsymbol{W}}$$ (4) 其中, ${\boldsymbol{\Psi}} ={{\boldsymbol{M}}_{\boldsymbol{b}}}{\boldsymbol{S}}$. 此时, 状态量${\boldsymbol{\eta}}$为躯干刚体在自然坐标系(始终与机体坐标系重合)中的运动描述.
与腿足式机器人不同, 双腿轮机器人处于支撑状态时, 腿轮不仅要提供躯干所需虚拟力, 还要在不同运动状态下保持唯一的平衡姿态. 因此, 以轮为动基座, 采用递推牛顿−欧拉方法建立支撑状态下的腿轮动力学方程如下所示:
$$\begin{split} &{{\boldsymbol{M}}_{i}}\left( {{{\boldsymbol{q}}_{i}},{{\boldsymbol{q}}_{iw}}} \right){{\ddot {\boldsymbol{q}}}_{i}} + {{\boldsymbol{C}}_{i}}\left( {{{\boldsymbol{q}}_{i}},{{\dot {\boldsymbol{q}}}_{i}},{{\boldsymbol{q}}_{iw}},{{\dot {\boldsymbol{q}}}_{iw}}} \right)+\\ & \quad{{\boldsymbol{G}}_{i}}\left( {{{\boldsymbol{q}}_{i}},{{\boldsymbol{q}}_{iw}}} \right){\rm{ + }}\;{{\boldsymbol{I}}}\left( {{{q}_{iw}},{{\dot q}_{iw}}} \right){{\ddot q}_{iw}} + {\boldsymbol{J}}_{i}^{\rm{T}}{{\boldsymbol{W}}_{i}} = {{\boldsymbol{\tau}} _{i}} \end{split} $$ (5) 其中, ${{\boldsymbol{\tau}} _{i}} = {\left[ {{\tau _{iw}}}\;\;{{\tau _{ik}}}\;\;{{\tau _{ih}}} \right]^{\rm{T}}}$分别为腿i的轮关节、膝关节与髋关节力矩. ${{\boldsymbol{q}}_{i}}={\left[ {{{q}_{ic}}}\;\;{{{q}_{ik}}}\;\;{{{q}_{ih}}} \right]^{\rm{T}}}$分别为腿i 的小腿俯仰角度、膝关节与髋关节角度. ${{\boldsymbol{M}}_{i}}\left( {{{\boldsymbol{q}}_{i}}} \right)$、${{\boldsymbol{C}}_{i}}\left( {{{\boldsymbol{q}}_{i}},{{\dot {\boldsymbol{q}}}_{i}}} \right)$、${{\boldsymbol{G}}_{i}}\left( {{{\boldsymbol{q}}_{i}}} \right)$分别为惯性矩阵、科氏力与离心力、重力补偿矩阵. 值得注意的是, 所提出的分布式动力学建模方法, 其关节角度变量中不包括轮式动基座的线运动与角运动, 但当双腿轮机器人进行高速运动时, 腿部连杆会产生较大的惯性力, 从而影响控制精确度与系统的平衡. 因此, ${\boldsymbol{I}}\left( {{{q}_{iw}},{{\dot q}_{iw}}} \right)$为动基座惯性力补偿矩阵, 以补偿高速运动时动基座传导给各腿轮的惯性力.
当双腿轮机器人处于腾空状态时, 将腿轮子系统分解为两个简化的模型 —— 腿部模型与轮式倒立摆模型, 腿部模型中髋关节坐标系与躯干坐标系方向相同, 以髋关节坐标系为基座, 建立动力学模型如下:
$${\boldsymbol{M}}_{i}^{s}\left( {{\boldsymbol{q}}_{i}^{s}} \right)\ddot {\boldsymbol{q}}_{i}^{s}\;+\; {\boldsymbol{C}}_{i}^{s}\left( {{\boldsymbol{q}}_{i}^{s},\dot {\boldsymbol{q}}_{i}^{s}} \right)\;+\;{\boldsymbol{G}}_{i}^{s}\left( {{\boldsymbol{q}}_{i}^{s}} \right) + {\boldsymbol{J}}_{i}^{{s}{\rm{T}}}{{\boldsymbol{F}}_{is}}{\rm{\;=\;}}{\boldsymbol{\tau}} _{i}^{s}$$ (6) 其中, ${\boldsymbol{\tau}} _{i}^{s} = \left[ {{\tau _{ih}}}\;\;{{\tau _{ik}}} \right]$, ${\boldsymbol{q}}_{i}^{s} = {\left[ {{{q}_{ih}}}\;\;{{{q}_{ik}}} \right]^{\rm{T}}}$.
为研究腾空阶段轮的转动对机器人姿态的影响, 将模型简化为一级轮式倒立摆, 即只关注矢状面内的运动, 将除轮以外的杆件质量集中于一个质点, 形成虚拟质心, 虚拟质心与轮轴的连线为虚拟倒立摆摆杆. 进行无外部接触力的拉格朗日动力学建模, 其动力学模型为
$$\begin{split} &\left( {{m_u} + {m_w} + \dfrac{{{I_w}}}{{{R^2}}}} \right)R{{\ddot \theta }_w} + L{m_u}\ddot \sigma {{\rm{c}} _\sigma } - L{m_u}{{\dot \sigma }^2}{{s} _\sigma } = 0 \\ &L{m_u}R{{{c}} _\sigma }{{\ddot \theta }_w} + \left( {{I_{b}} + {L^2}{m_u}} \right)\ddot \sigma - gL{m_u}{{s} _\sigma } = - {\tau _w} \\[-10pt] \end{split} $$ (7) 其中, ${m_u}$为除轮外其他杆件的质量总和, $\sigma $为倒立摆的虚拟俯仰角, L为虚拟摆杆长度, ${I_{b}}$与${I_w}$分别为摆杆与轮的转动惯量.
2. 轨迹生成器
构造轨迹生成器使机器人可根据障碍物的高度规划此次跳跃的躯干参考轨迹与足端参考轨迹. 本节中, 首先根据障碍物高度确定关键点处的位置与速度, 然后采用三次样条插值法得到躯干质心点与轮最小离地点的连续位置与速度. 简称轮最小离地点为足端. 相关参数的含义如表1所示.
表 1 跳跃参数设置Table 1 Parameters of the jump motion参数 参数含义 H0 正常行走时躯干站立高度在${\Sigma _O}$中的表示 H1 腾空瞬间躯干站立高度在${\Sigma _O}$中的表示 Hpt 足端最大离地距离在${\Sigma _O}$中的表示 Hs 足端最大收缩量在${\Sigma _B}$中的表示 图2展示了机器人跳跃时躯干与足端轨迹, 虚线表示躯干正常站立高度H0, 实线为跳跃过程中躯干的期望轨迹. 支撑相时, 机器人双轮着地; 腾空相时, 机器人双轮离地, 处于自由落体状态. 将跳跃动作分解为三阶段, 分别为起跳($p_0-p_1$)、腾空($p_1- p_3$)、缓冲($p_3-p_4$). 起跳阶段, 通过腿部快速伸展, 为躯干纵向加速, 当达到期望速度($p_1$)时, 腿部开始收缩, 进入腾空相. 腾空相躯干受到重力加速度, 纵向速度不断减小, 在此过程中, 腿部完成了收缩, 并伸展到可保持正常站高H0的长度, 准备落地. 缓冲阶段将纵向速度调整为0, 并保持期望站高.
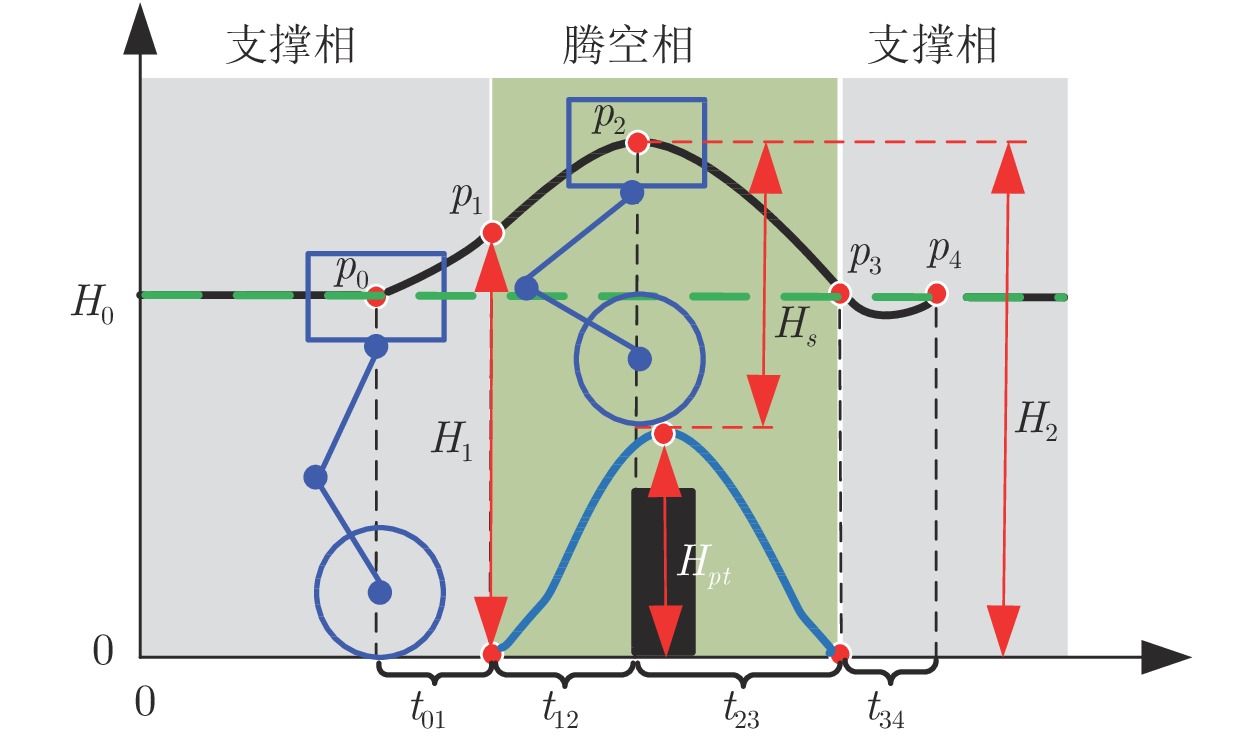 图 2 躯干与足端矢状面轨迹示意图Fig. 2 The trajectory schematic of the torso and feet in the sagittal plane
图 2 躯干与足端矢状面轨迹示意图Fig. 2 The trajectory schematic of the torso and feet in the sagittal plane图2中, $ H_0 $、$ H_1 $以及腿部最大收缩量$H_s $ 为常量, 由机器人本体结构确定, $H_{pt} $由所要跨越的障碍高度确定. $p_2 $ 点的高度也随之确定: ${H_2}=H_s + {H_{pt}} $, 由于p2点的速度${{v}_2} = 0$, 根据能量守恒定理, 可得:
$$\left\{\begin{aligned} &{{v}_1} = \sqrt {2g\left( {{H_{pt}} + {H_s} - {H_1}} \right)} \\ &{{v}_{\rm{3}}} = \sqrt {2g\left( {{H_{pt}} + {H_s} - {H_{\rm{0}}}} \right)} \\ &{t_{01}} = \dfrac{{2\left( {{H_1} - {H_0}} \right)}}{{\sqrt {2g\left( {{H_{pt}} + {H_s} - {H_1}} \right)} }} \\ & {t_{12}} = \dfrac{{\sqrt {2g\left( {{H_{pt}} + {H_s} - {H_1}} \right)} }}{g} \\ & {t_{{\rm{23}}}} = \dfrac{{\sqrt {2g\left( {{H_{pt}} + {H_s} - {H_{\rm{0}}}} \right)} }}{g} \end{aligned}\right. $$ (8) 其中, ${{v}_1}$和${{v}_{\rm{3}}}$分别为点p1和p3处的速度. 足端离地时间即腾空时间为${t_{12}} + {t_{23}}$. 为同时保证每一段期望轨迹的平滑以及初始点与结束点的位置$\left( {{y_{{\rm{init}}}}},{{y_{{\rm{end}}}}}\right)$、速度$\left( {{{v}_{{\rm{init}}}}},{{{v}_{{\rm{end}}}}} \right)$要求, 采用三次样条函数生成连续轨迹. 起跳阶段的纵向位置期望轨迹、$p_1$-$p_2 $阶段、${p_2}$-${p_3}$ 阶段足端期望轨迹均由式(9)生成:
$$ \left\{\begin{aligned} &y=a{t}^{3}+b{t}^{2}+ct+d\\ &c={v}_{{\rm{init}}}\\ &d={y}_{{\rm{init}}}\\ &a=\dfrac{{v}_{{\rm{end}}}t-2{y}_{{\rm{end}}}+{v}_{{\rm{init}}}t+2{y}_{{\rm{init}}}}{T^{3}}\\ &b=\dfrac{{v}_{{\rm{end}}}-3a{T}^{2}-c}{2T}\end{aligned}\right.$$ (9) 其中, T为该段三次样条插值的总时长.
3. 全身力矩控制器
为实现机器人奔跑与跳跃的有效控制, 本节介绍了分布式控制器的设计方法. 首先基于躯干子系统的动力学模型, 采用二次规划 (Quadratic programming, QP)二次优化得到合理的虚拟作动力以使得躯干位姿满足控制要求. 采用逆动力学前馈补偿与逆运动学反馈补偿方法得到腿轮关节力矩.
3.1 基于最优虚拟力分配的躯干控制器
对于躯干单刚体进行静力分析, 假设躯干质量集中于几何中心处, 建立躯干质心合力与躯干受到的腿轮虚拟作动力的映射关系如下所示:
$$\left[ {\begin{array}{*{20}{c}} {\boldsymbol{F}} \\ {\boldsymbol{N}} \end{array}} \right]{\rm{\;+ \;}}{{\boldsymbol{G}}_{b}} = {\boldsymbol{A}}\left[ {\begin{array}{*{20}{c}} {{{\boldsymbol{W}}_{1}}} \\ {{{\boldsymbol{W}}_{2}}} \end{array}} \right]$$ (10) 其中, ${\boldsymbol{F}}{\rm{\;= [}}{F_x},{F_y},{F_z}{]^{\rm{T}}},\;{\boldsymbol{N}} = {[{N_x},{N_y},{N_z}]^{\rm{T}}}$分别为躯干质心合力与力矩. 受到关节配置的约束, 腿轮末端只能主动输出延机体坐标系x和z的力与绕y轴的力矩, 式(10)可展开为式(11)的形式.
$$\begin{split} \left[ {\begin{array}{*{20}{c}} {\boldsymbol{F}} \\ {\boldsymbol{N}} \end{array}} \right] + &\left[ {\begin{array}{*{20}{c}} {{m_{{b}}}g\sin \beta } \\ 0 \\ {{m_{{b}}}g\cos \beta } \\ {\rm{0}} \\ {\rm{0}} \\ {\rm{0}} \end{array}} \right] = \\ &\underbrace {\left[ {\begin{array}{*{20}{c}} 1&0&0&1&0&0 \\ 0&0&0&0&0&0 \\ 0&1&0&0&1&0 \\ 0&{\dfrac{w}{2}}&0&0&{ - \dfrac{w}{2}}&0 \\ { - \dfrac{h}{2}}&0&1&{ - \dfrac{h}{2}}&0&1 \\ { - \dfrac{w}{2}}&0&0&{\dfrac{w}{2}}&0&0 \end{array}} \right]}_{\boldsymbol{A}}\left[ {\begin{array}{*{20}{c}} {{f_{1x}}} \\ {{f_{1z}}} \\ {{n_{1y}}} \\ {{f_{2x}}} \\ {{f_{2z}}} \\ {{n_{2y}}} \end{array}} \right]\end{split}$$ (11) 其中, $g = 9.8 \; {\rm{m}}/{{\rm{s}}^2}$. 根据不同维度的特点构造躯干期望虚拟力${\boldsymbol{F}}$与${\boldsymbol{N}}$的反馈部分, 基于动力学模型进行必要的前馈补偿, 为保证速度跟踪性能, 虚拟力${F_x}$的反馈部分采用自适应滑膜方法构造, 其他维度采用比例−微分控制方法构造, 具体方法为
$$\left\{\begin{aligned} &{F_x} = s + sat\left( s \right)c \\ &s = \dot e + \lambda e \\ &e = {{\dot x}_d} - {}^B{{{v}}_{{B}}}, \dot e = {{\ddot x}_d} - {}^B{{\dot v}_B} \\ &{F_z} = {k_{pz}}\left( {{z_d} - {}^B{z_B}} \right) + {k_{dz}}\left( {{{\dot z}_d} - {}^B{{\dot z}_B}} \right)+{m_{{b}}}{{\ddot z}_d} \\ &{N_x} = {k_{p\gamma }}\left( {{\gamma _d} - \gamma } \right) + {k_{n\gamma }}\left( {{{\dot \gamma }_d} - \dot \gamma } \right) \\ & {N_y} = {k_{p\beta }}\left( {{\beta _d} - \beta } \right) + {k_{n\beta }}\left( {{{\dot \beta }_d} - \dot \beta } \right) \\ &{N_z} = {k_{{\omega}} }\left( {{{{\omega}} _d} - {{\omega}} } \right) \end{aligned}\right. $$ (12) 矩阵${\boldsymbol{A}}$为奇异矩阵, 因此无法直接解得与躯干虚拟广义力一一对应的腿轮末端作动力, 因此, 将式(11)变形为
$${\boldsymbol{A}}\underbrace {\left[ {\begin{array}{*{20}{c}} {{{\boldsymbol{W}}_{1}}} \\ {{{\boldsymbol{W}}_{2}}} \end{array}} \right]}_x=\underbrace {{{\left[ {\begin{array}{*{20}{c}} {\boldsymbol{F}} \\ {\boldsymbol{N}} \end{array}} \right]}^{{\rm{desire}}}}+{{\boldsymbol{G}}_{b}}}_b$$ (13) 通过QP优化器进行作动力求解
$$\begin{split} &\mathop {\min }\limits_{\boldsymbol{x}} \;\;\;f =\; {\left( {{\boldsymbol{Ax}} - {\boldsymbol{b}}} \right)^{\rm{T}}}{\boldsymbol{Q}}\left( {{\boldsymbol{Ax}} - {\boldsymbol{b}}} \right)\;+ \\ & \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;{\boldsymbol{P}}{\left\| {{\boldsymbol{x}} - {{\boldsymbol{x}}_{{\rm{pre}}}}} \right\|^2} + {\boldsymbol{J}}{\left\| {\boldsymbol{x}} \right\|^2} \\ &{\rm{s.t}}\; \left| {{f_{ix}}} \right| \leq \mu {f_{iz}} \end{split} $$ (14) 其中, Q, P, J为正定对角权重矩阵, ${{\boldsymbol{x}}_{{\rm{pre}}}}$为上一时刻的解.
3.2 腿部控制器
当机器人处于支撑相时, 躯干控制器将躯干期望合力分配为各条腿轮的末端力旋量. 为实现力伺服, 基于轮式基座动力学模型前馈补偿的逆动力学力矩解算器如下所示
$$\begin{split} {{\boldsymbol{\tau}} _{i}} =\;& {\boldsymbol{J}}_{i}^{\rm{T}}{{\boldsymbol{W}}_{i}} + {{\boldsymbol{C}}_{i}}\left( {{{\boldsymbol{q}}_{i}},{{\dot {\boldsymbol{q}}}_{i}},{{q}_{iw}},{{\dot q}_{iw}}} \right) + \\ &{{\boldsymbol{G}}_{i}}\left( {{{\boldsymbol{q}}_{i}},{{q}_{iw}}} \right) +{i}\left( {{{q}_{iw}},{{\dot q}_{iw}}} \right){{\ddot q}_{iw}} \end{split} $$ (15) 其中, ${q}_{iw}{\text{, }}{\dot{q}}_{iw}{\text{, }}{\ddot{q}}_{iw}$均由基于传感器的状态观测器得到. 基于动力学前馈补偿的控制方法可以使机器人自适应地保持在唯一的不稳定平衡点处.
当机器人处于腾空相时, 为保证腿轮末端与躯干的相对位置以及机器人在世界坐标系中姿态的稳定, 将腾空相腿部控制器分为两部分, 基于式(6)动力学模型, 对髋关节与膝关节进行力矩控制以实现腿轮末端轨迹跟踪.
$${\boldsymbol{\tau}} _{i}^{s} = {\boldsymbol{C}}_{i}^{s}\left( {{\boldsymbol{q}}_{i}^{s},\dot {\boldsymbol{q}}_{i}^{s}} \right) + {\boldsymbol{G}}_{i}^{s}\left( {{\boldsymbol{q}}_{i}^{s}} \right) + {\boldsymbol{J}}_{i}^{{s}{\rm{T}}}{{\boldsymbol{F}}_{is}}$$ (16) 其中, ${{\boldsymbol{F}}_{is}} = {\left[ {{f_{ipx}}}\;\;{{f_{ipz}}}\right]^{\rm{T}}}$.
$$\left\{\begin{aligned} &{f_{ipx}} = {k_{ipx}}\left( {{x_{pd}} - {x_{ip}}} \right) + {k_{idx}}\left( {{{\dot x}_{pd}} - {{\dot x}_{ip}}} \right) \\ &{f_{ipz}} = {k_{ipz}}\left( {{z_{pd}} - {z_{ip}}} \right) + {k_{idz}}\left( {{{\dot z}_{pd}} - {{\dot z}_{ip}}} \right) \end{aligned}\right. $$ (17) 其中, $\left( {{x_{ip}},{z_{ip}}} \right)$与$\left( {{x_{pd}},{z_{pd}}} \right)$分别为自然坐标系中的足端位置描述与期望足端位置描述.
在腾空阶段, 系统处于动量守恒状态, 因此腿部关节的运动会导致整体姿态的变化, 此时可通过控制飞轮转动对姿态的误差进行有效补偿. 将一级轮式倒立摆动力学模型式(7)变形, 得到:
$$\ddot \beta = - \frac{{L{m_{b}}R{{\rm{c}} _\beta }}}{{{I_{b}} + {L^2}{m_{b}}}}{\ddot \theta _w} - \frac{1}{{{I_{b}} + {L^2}{m_{b}}}}{\tau _w} + \frac{{gL{m_{b}}{{\rm{s}} _\beta }}}{{{I_{b}} + {L^2}{m_{b}}}}$$ (18) 此时轮不与地面接触, 可以看作调整平衡的飞轮, 通过式(18)可以看出, 飞轮的转动能够影响倒立摆的俯仰角运动状态, 当俯仰角逆时针偏离期望位置时, 飞轮应顺时针转动保证姿态平衡, 反之亦然. 基于这一结论, 可以根据躯干控制器中输出的俯仰姿态矫正力矩${N_y}$ (如式(12)所示)来规划轮的力矩, 从而得到轮关节的力矩为
$$ {\tau _{{\rm{1}}w}} = {\tau _{2w}} = - k{N_y} $$ (19) 其中, k为正比例增益.
4. 仿真实验
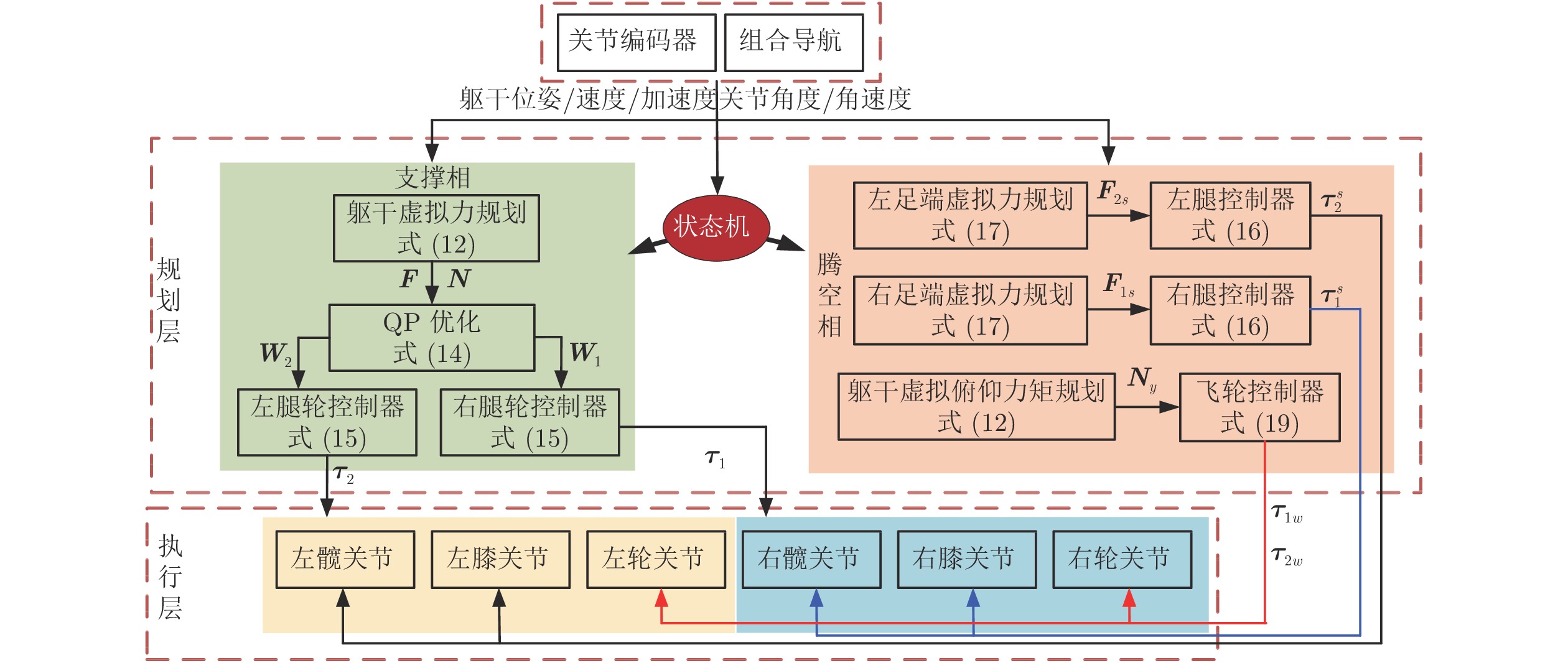
在Webots 8.4.0中建立与HEBI IGOR同尺寸3D模型, 与Visual Studio 2017、Gurobi 902优化解算库进行联合仿真. 为验证本文所提算法的有效性, 分别设置了连续跳跃实验与空中姿态调整对比实验, 其总体控制框图如图3所示. 仿真视频见
https://www.bilibili.com/video/BV1zz4y1X7jp/ .根据期望跳跃高度${H_{pt}}$的不同, 轨迹生成器会生成不同的起跳阶段躯干纵向期望轨迹. 分别针对${H_{pt}}\;{ = 0}.45\;{\rm{m}}$, ${H_{pt}}\;{ = 0}.35\;{\rm{m}}$, ${H_{pt}}\;{ = 0}.25\;{\rm{m}}$进行了弹跳实验, 机器人的躯干纵向轨迹${z_{b}}$以及足端位置轨迹${z_p}$如图4所示, 可以看出期望弹跳高度越大, 所规划的躯干纵向期望轨迹在起跳点处纵向速度越大, 从而腾空相时间越长.
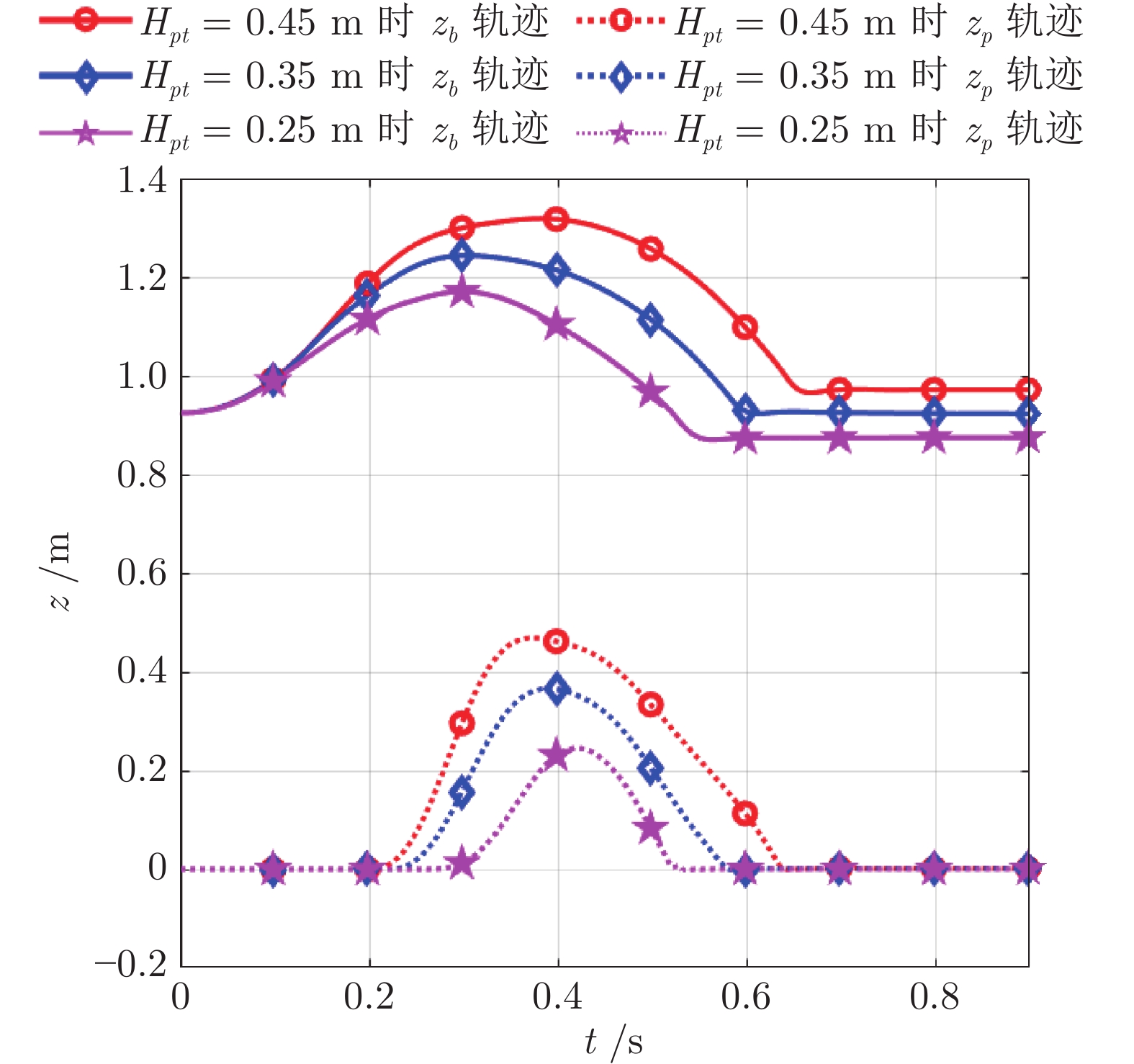 图 4 不同离地高度下躯干与足端纵向位置曲线Fig. 4 Longitudinal position curves of the torso and feet at different ground clearance
图 4 不同离地高度下躯干与足端纵向位置曲线Fig. 4 Longitudinal position curves of the torso and feet at different ground clearance4.1 连续跳跃实验
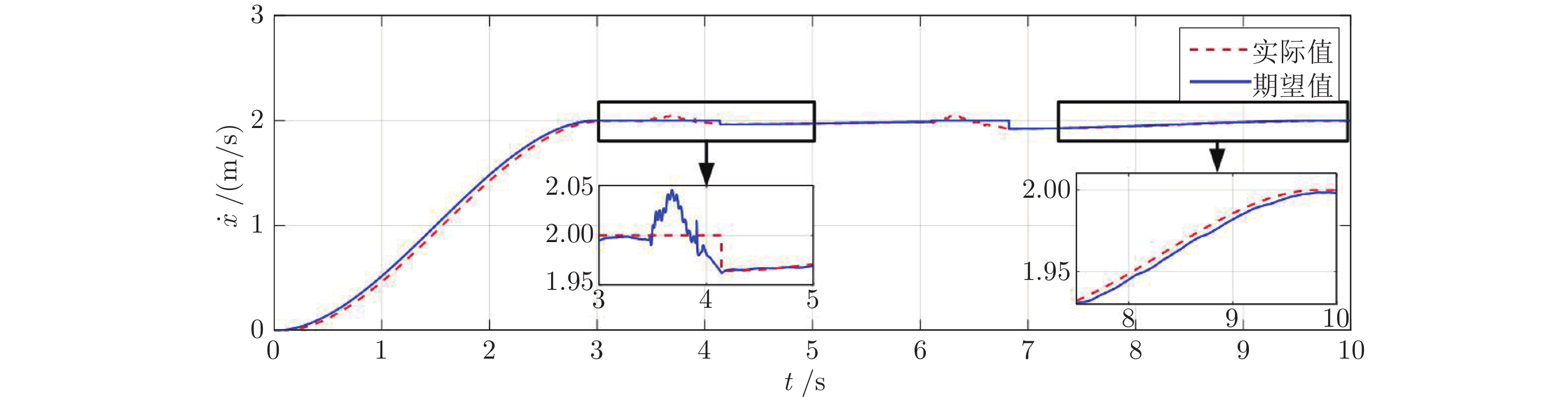
本仿真实验主要验证: 1)该算法框架下的跳跃动作是否能够实现; 2)该算法框架是否能够对跳跃动作带来的强干扰进行抑制并保持有界稳定. 因此, 仿真实验设置如下: 机器人初始状态为站立静止, 在0 ~ 3 s内加速至2 m/s, 随后保持匀速运动. 当t = 3.35 s时, 通过外部遥控下达${{H}_{{pt}}}{\rm{\;= \;0}}.45\;{\rm{m}}$的跳跃命令, 机器人依次执行起跳−腾空−落地缓冲−调整; 当t = 5.85 s时, 再次下达${H_{pt}}=0.45\;{\rm{m}}$的跳跃命令, 机器人完成跳跃并最终将跳跃导致的状态偏移调整到有界稳定状态. 以首次跳跃为例, 其仿真截图如图5所示.
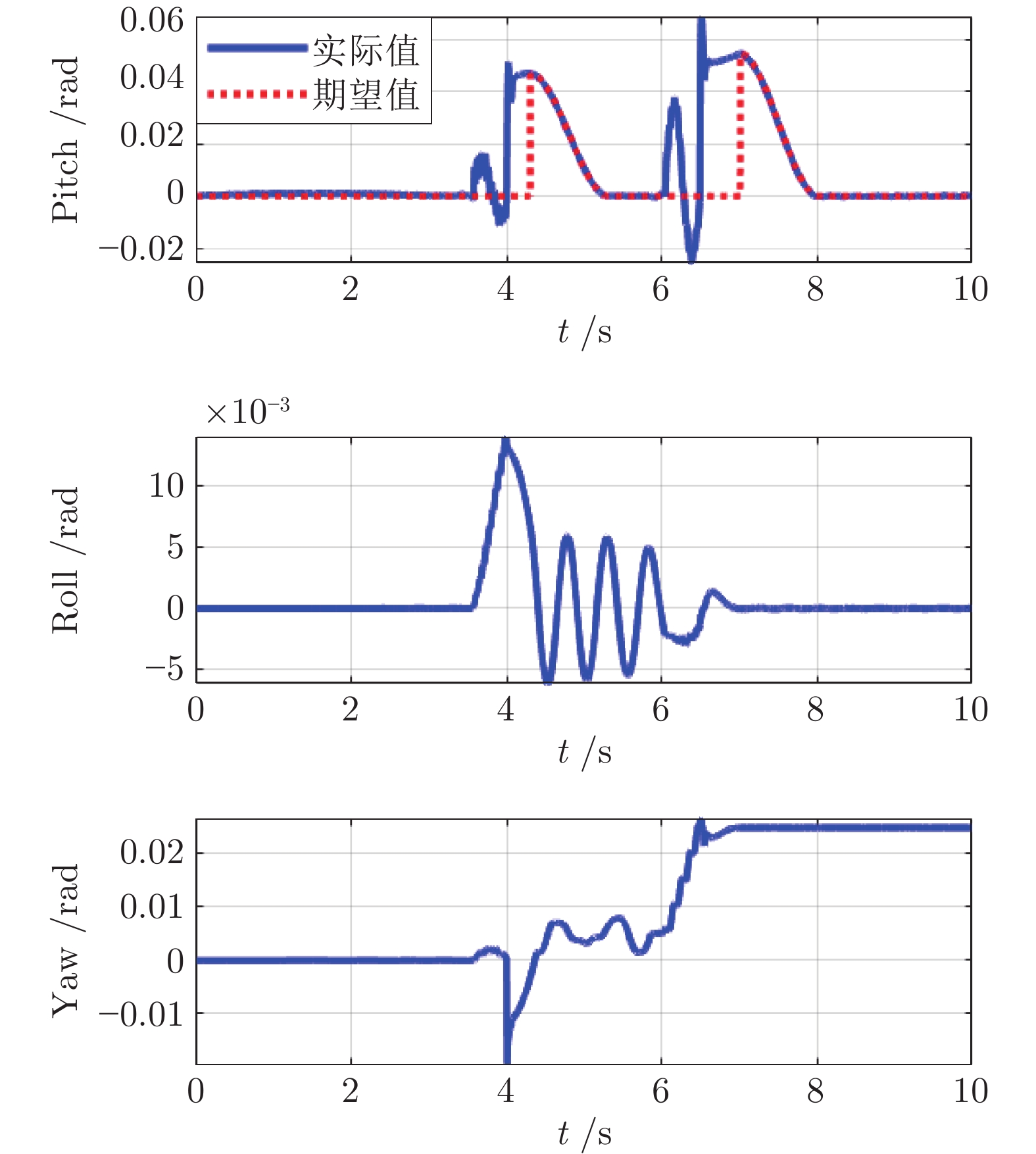
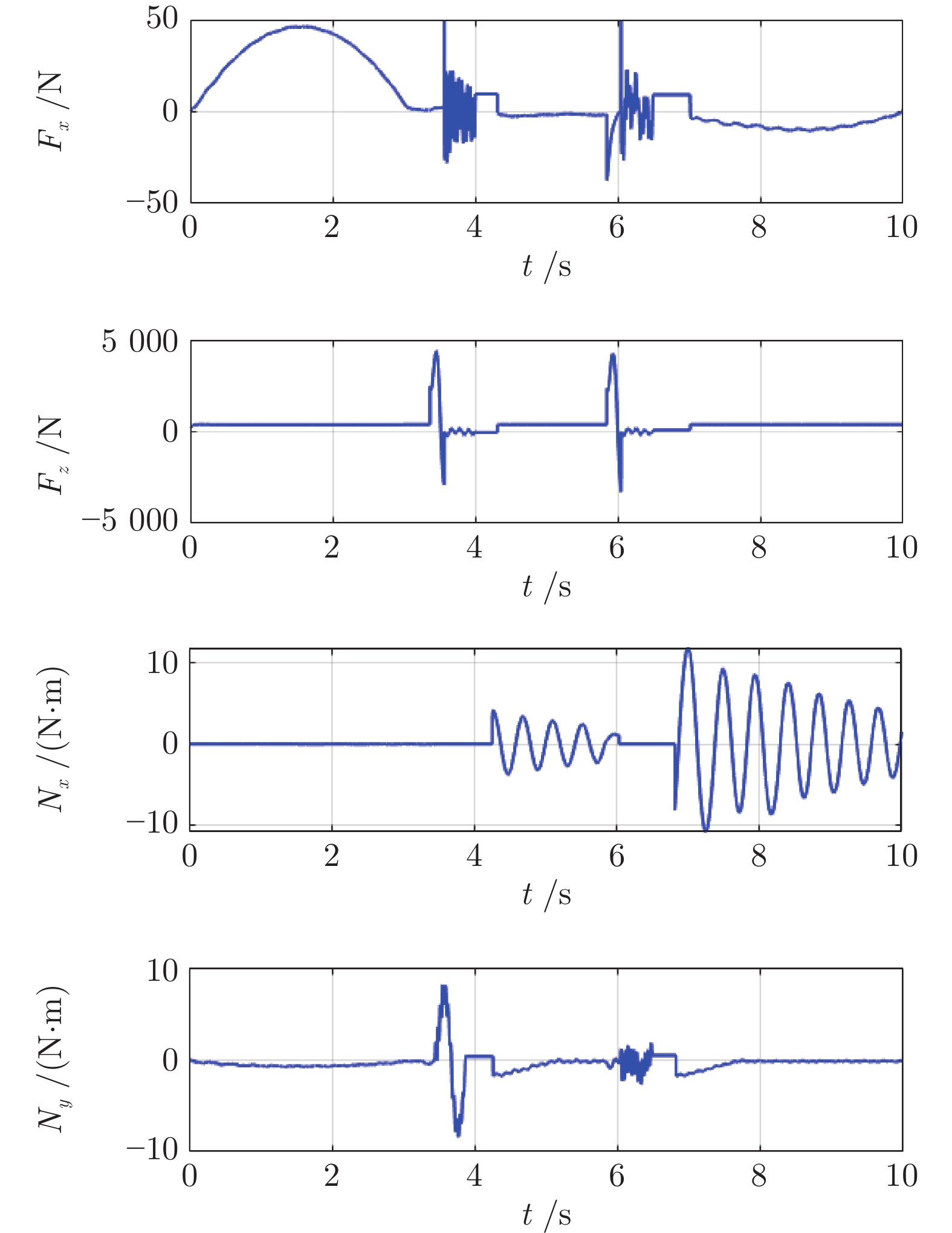
对于完全站立高度为1.35 m的腿轮机器人来说, 最大离地高度为0.45 m的跳跃会对其平衡状态产生较大冲击, 甚至失去平衡. 由图6和图7中曲线可看出, 每次跳跃结束后, 各状态量进行了及时调整. 0 ~ 3 s加速阶段躯干水平速度的最大跟踪误差不超过0.075 rad, 其他支撑阶段, 误差小于0.04 rad. 图7可见, 处于支撑相时, 加速度越大水平速度误差越大, 最大误差为0.06 m/s. 当机器人进入腾空相时, 与外界环境不再产生相互作用力, 此时, 机器人保持动量守恒状态, 因此腿部伸缩运动影响了躯干的水平速度, 最大误差不超过0.08 m/s. 由腾空相切换为支撑相的瞬间, 实际水平速度与期望速度(2 m/s)之间存在偏差, 控制器实时规划期望速度曲线, 并将速度调整为2 m/s. 此外, 如图6所示, 腾空相中机器人pitch与roll角波动较大, 但着陆后控制器可有效控制姿态角恢复到0 rad附近. 与之对应的, 如图8所示, 力与力矩在着陆后出现较明显波动, 用以调整状态量使其恢复临界稳定.
图8为躯干子系统所需的虚拟广义力曲线图, 可见, 前进方向虚拟作动力${F_x}$与躯干水平加速度相关, 0 ~ 3 s水平加速度始终为正, 因此, ${{F_x}> 0}$, 最大值约为46 N; 当站高保持常值时, 纵向虚拟作动力${F_z}$在388 N ~ 398 N (mb = 40 kg)区间内波动, 由于起跳瞬间躯干纵向期望轨迹的初始点处加速度不为零, 加速度跳变导致了${F_z}$的跳变.
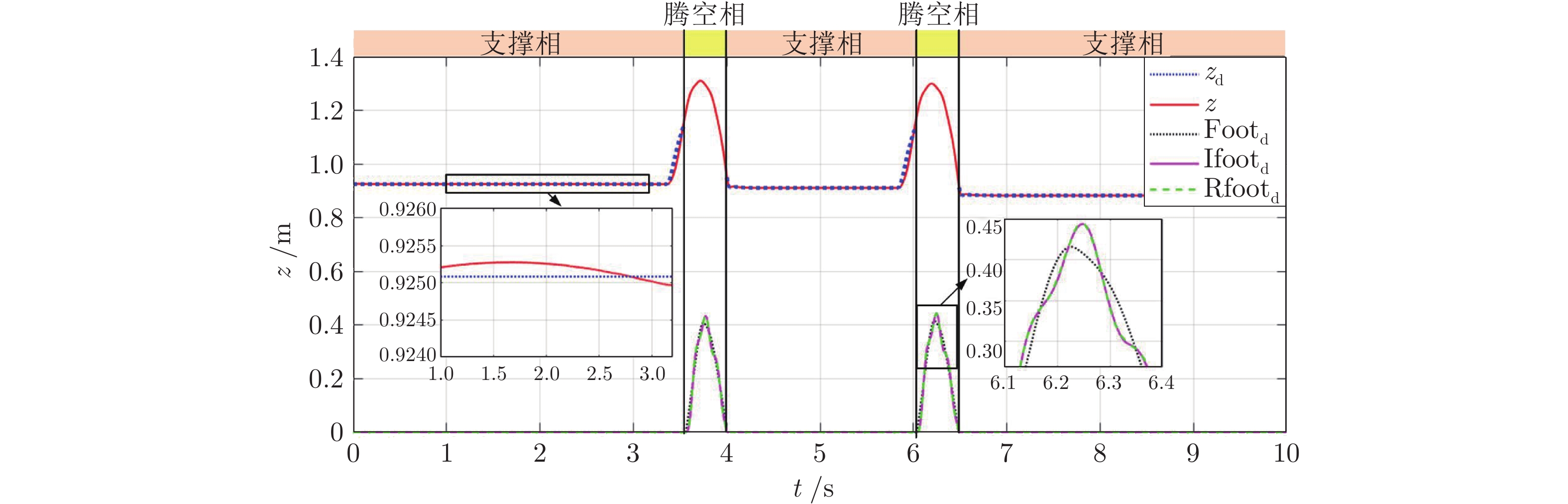
躯干纵向位置跟踪曲线如图9所示, 最大误差为48 mm, 发生在起跳阶段, 当期望站高为常量${H_{\rm{0}}}$时, 最大误差为0.2 mm, 发生在落地缓冲阶段. 可见该控制框架具有对纵向位置跟踪的稳定性与抗扰能力. 腾空阶段, 足端位置基于躯干动基座计算得到, 从而躯干动基座的波动会影响足端轨迹跟随, 导致足端轨迹波动较大, 最大误差为50 mm.
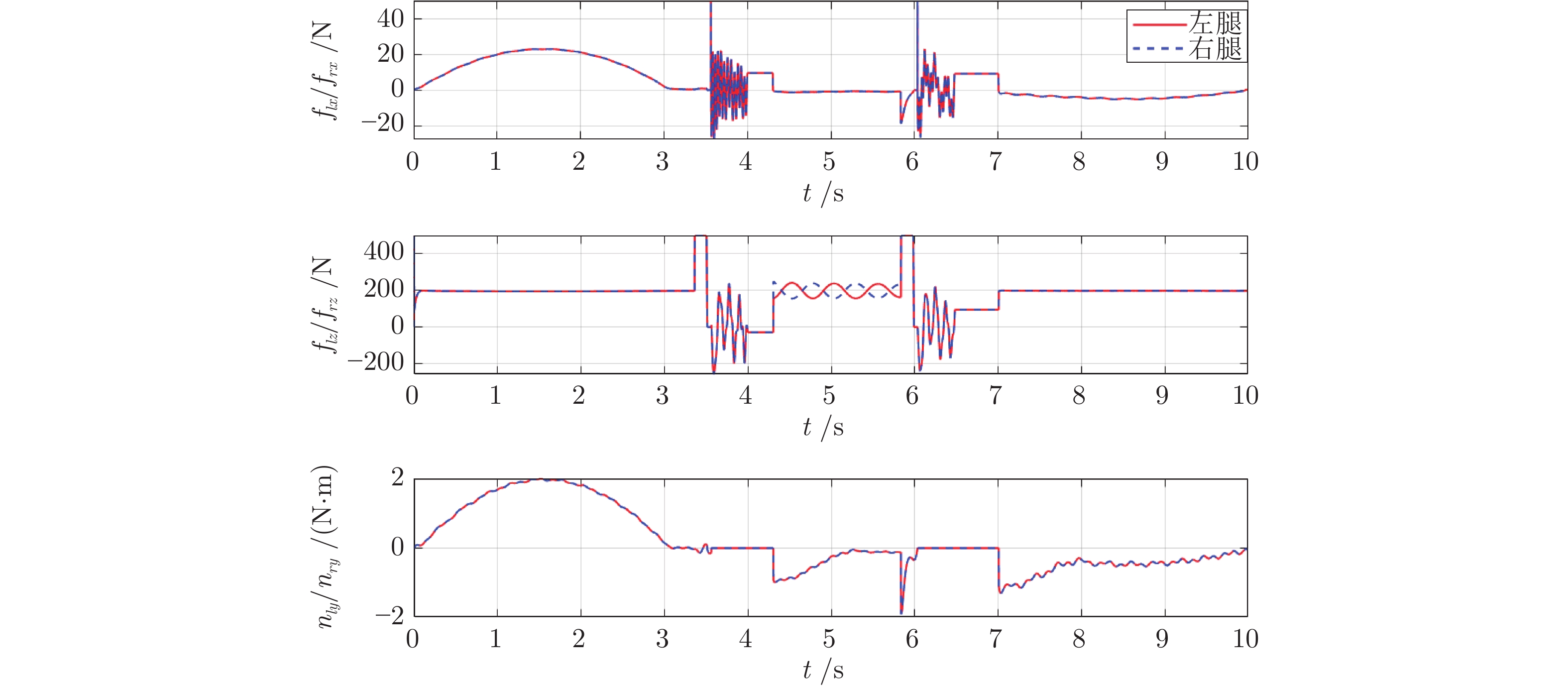
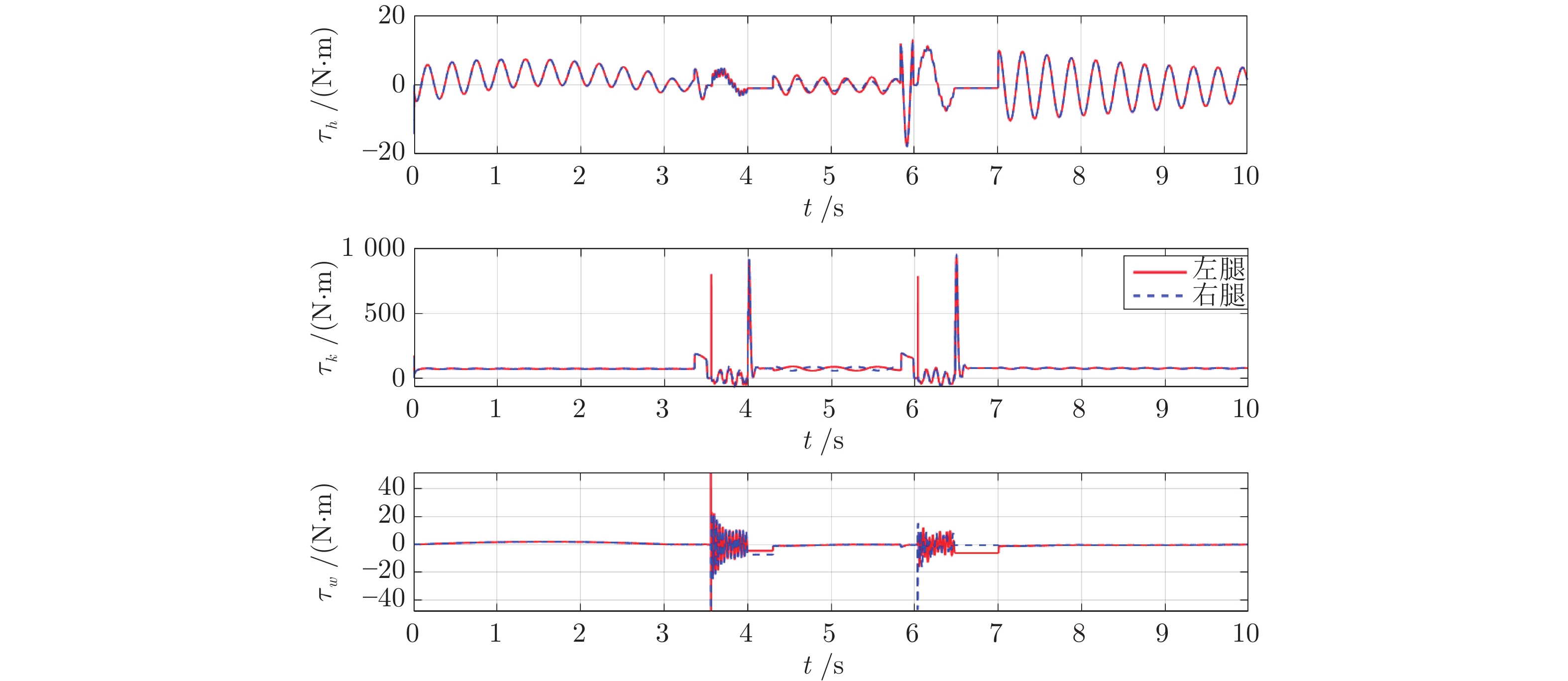
通过最优力分配将躯干虚拟作动力分配为各腿轮末端期望的输出广义力如图10所示. 两腿轮的广义力输出基本保持一致, 在着陆后有明显的调整行为. 各关节力矩曲线如图11所示, 膝关节力矩输出较大, 髋关节与轮关节力矩均在0附近波动.
4.2 空中姿态调整对比实验
为验证轮轴力矩对俯仰姿态矫正的有效性, 设计了腾空姿态调整对比实验. 实验1中腾空相的轮轴力矩${\tau _w} = 0\;({\rm{N}}\cdot{\rm{m}})$, 实验2中腾空相的轮轴力矩${\tau _w} = - {N_y}$, 保证其他条件完全相同. 图12为对比实验的俯仰角曲线, 可见当${\tau _w} = 0\;({\rm{N}}\cdot{\rm{m}})$时, 俯仰角由腾空初始时刻到着陆瞬间, 一直处于单向递增状态, 若腾空时间过长会导致着陆姿态不稳定. 当${\tau _w} =- {N_y} $时, 以俯仰角状态量为反馈进行了有效的姿态调整, 使得腾空相俯仰角在 $(- 0.015\;{\rm {rad}} $, 0.02 rad)范围内波动. 证明了基于角动量守恒的轮的反向转动对腾空姿态的调整是有效的.
5. 结束语
为使双腿轮机器人实现高动态运动, 本文提出了基于最优力分配的全身力矩控制器, 该控制器基于动力学模型进行设计, 所生成的全身力矩可在不额外规划平衡控制器的基础上实现机器人的自平衡, 并有效控制躯干位姿. 仿真实验表明, 该控制器能够同时保证水平速度、站高等多个维度的状态量处于有界稳定. 为提高双腿轮机器人地形适应能力, 规划并实现了双腿轮机器人的跳跃运动, 使其能在不打断高速运动的同时跨越垂直障碍, 进行了连续跳跃实验, 验证了所提方法的有效性.
-
图 1 单台风机短期风速风电预测方法框架
Fig. 1 Framework of short-term wind power forecasting methods for a single turbine
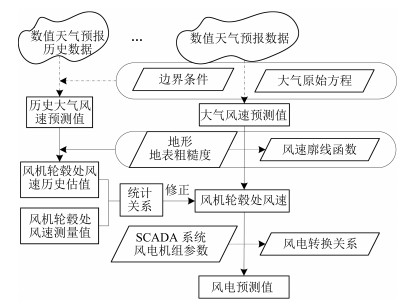
图 2 利用数值天气预报预测单台风机短期风电步骤
Fig. 2 Procedure of short-term wind power forecasting methods for a single turbine using numerical weather prediction
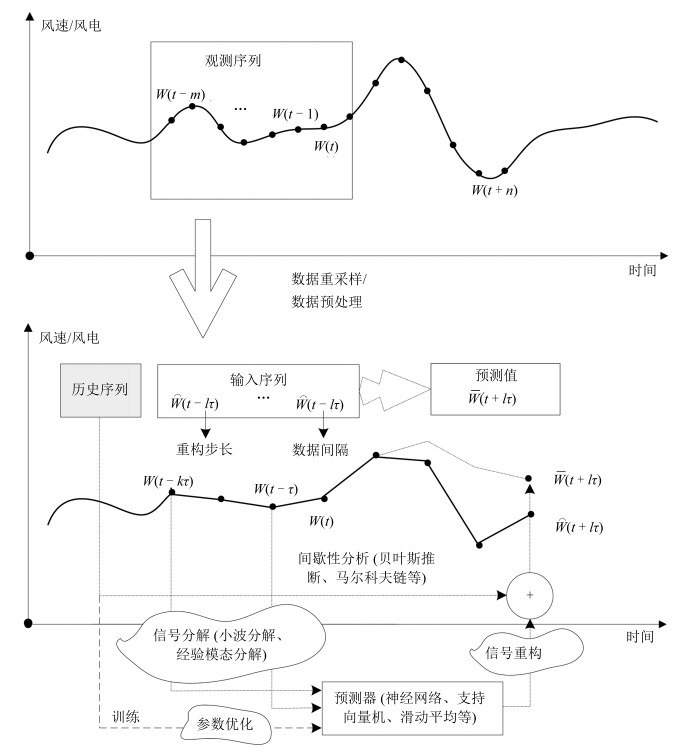
图 3 基于风力信息风电场短期风电预测方法框架
Fig. 3 Framework of short-term wind power forecasting methods for a wind farm with wind information

图 4 利用信号分解预测风电场风速风电方法框图
Fig. 4 Framework of wind power forecasting methods for a wind farm using signal decomposition
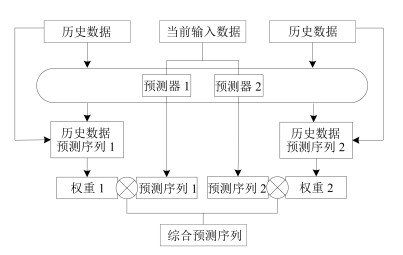
图 5 利用方法综合思想预测风电场风速风电框架
Fig. 5 Framework of wind power forecasting methods for a wind farm with synthesized thought

图 6 利用丰富气象数据预测风电场短期风电方法框架
Fig. 6 Framework of short-term wind power forecasting methods for a wind farm with abundant meteorological information

图 7 利用数值天气预报预测风电场长期风电方法框架
Fig. 7 Framework of long-term wind power forecasting methods for a wind farm using numerical weather prediction
表 1 单台风力发电机的部分发电预测方法对比
Table 1 Comparison among part of wind power forecasting methods for a single turbine
文献 尺度 方法 输入 适用 误差 [25] 5 s 滑动平均 风速 平稳、线性 — [26] 12 h 多元回归 风电 平稳、波动小 RMSE:比常值法低4.43 % [27] 24 h 泰勒-克里格 风速 相似序列模式 RMSE:比ARIMA低15.23 % [28] 10 min 马氏链、经验分布 风电 平稳 RMSE:连续18 h内2.36 m/s [30] 5 d 指数平滑 风速 长期平稳 MAPE: 49.68 % [31] 2 d 分数-ARIMA 风速 噪声与频率反比 MSE:比常值法低42 % [32] 2 d 主成分分析、相空间重构 风电 长期平稳 NMAE:约3 %, 80 %情况下不超过12.5 % [36] 7.5 h NWP、分段转化 预报风速 测量准、地表均匀 NRMSE: 2.69 % [37] 36 h NWP、线性校正 测风速、预报风速 线性校正、长期相关 RMSE: 1.19 m/s [38] 8 d 神经网络 风速、风电、温度 预报风速转化风电 NRMSE: 2.01 % 注:误差评价标准一般包括标准均方根误差(Normalized root mean squared error, NRMSE), 均方根误差(Root mean squared error, RMSE), 相对百分比平均绝对误差(Mean absolute percentage error, MAPE), 标准平均绝对误差(Normalized mean absolute error, NMAE), 平均绝对误差(Mean absolute error, MAE), 标准均方误差(Normalized mean squared error, NMSE), 均方误差(Mean squared error, MSE), 下同.  下载: 导出CSV
下载: 导出CSV
表 2 只利用风力信息的风电场的部分发电预测方法对比
Table 2 Comparison among part of wind power forecasting methods merely using wind information for a wind farm
文献 尺度 方法 输入 适用 误差 [42] 90 min 贝叶斯推断 风速 间歇性、先验规律 RMSE:比常值法低2.796 % [43] 60 min 支持向量机、马尔科夫链 风速 间歇性、平稳 MAE: 9.1 % [44] 10 min 贝叶斯推断、马尔科夫链 风速 平稳、先验规律 RMSE:比常值法低4.57 % [47] 1 h 受限向量-ARMA 风速、风向 二维平稳 MAE: 0.809 m/s [48] 15 min 上下界估计网络 风电 平稳 — [57] 24 h 成组数据推断网络 风速 平稳 MAE: 2.176 m/s [58] 30 min 贝叶斯推断、神经网络、高斯过程 风速、风电 平稳、高斯性 NRMSE: 16.9 % [62] 3 h ARIMA、卡尔曼滤波 风速 稳定、波动小 MAPE: 2.06 % [68] 3 h 支持向量机、经验小波 风速、风电 非平稳、子序列可预测性 MAPE: 18.41 % [70] 3 h 小波支持向量机 风速 非平稳 MAPE: 10.76 % [71] 3 h 经验模态分解、神经网络 风速 非平稳、子序列可预测性 MAPE: 1.87 % [76] 30 h 自适应小波网络、前馈网络 风速、风电 长期平稳 RMSE: 10.221 % [77] 1天 ARIMA、卡尔曼滤波、神经网络 风速 长期平稳、相关 MAPE:两测试点分别为16.52 %、8.10 % [83] 1天/ 1周 小波变换、模糊网络 风电 长期平稳、偏差平稳 MAPE: 11.91 % (1天)/ 15.38 % (1周) % [85] 1天/ 1月 经验模态分解、神经网络 风速 非平稳、子序列可预测性 MAPE: 17.29 % (1天)/ 14.92 % (1月) [86] 1天 小波包变换、相空间重构 风速 非平稳、子序列可预测特征 MAPE:约20.37 % [87] 24 h 主成分分析 风速 可预测特征 MAE:比常值法低8 %$ \sim $11 % [89] 24 h 广义主成分分析 风速 隐藏可预测特征 RMSE: 2.31$ \sim $3.76 m/s [91] 24 h 珊瑚礁优化算法、神经网络 风速 隐藏可预测成分 RMSE: 2.272 m/s [93] 1年/ 1月/ 30天 多尺度数据融合、神经网络 风速 长短期分别平稳 MAE: 1年0.80 m/s, 1月0.17 m/s, 30天0.64 m/s [92] 48 h 高斯过程、神经网络 风电 短期惯性、长期间歇性 RMSE: 0.175 m/s [94] 90天 Elman递归网络、季节调整 风速 季节特征、长期平稳 MAPE: 15.32 % [97] 1天 高斯混合、高斯回归 风速 短期非平稳、季节特征 MAPE: 0.28 % [98] 5天 径向基神经网络、特征分类 风速、风电 有模式特征、长期非平稳 RMSE: 4.78 % [99] 3天 ARIMA-神经网络 风速 基本平稳 MAE:某处0.508 m/s
下载: 导出CSV
表 3 利用风力信息及其他气象信息的风电场的部分发电预测方法对比
Table 3 Comparison among part of wind power forecasting methods using wind information and meteorological information for a wind farm
文献 尺度 方法 输入 适用 误差 [41] 10 min 图学习、马尔科夫链 地理信息、风速、风电 间歇性、季节性、相似模式 MAPE: 3.65 %$ \sim $8.22 % [101] 10 min 洛伦兹扰动-小波神经网络 风速、气压、粗糙度、温度、湿度 预测偏差混沌、洛伦兹特性 RMSE:比小波神经网络高50 %$ \sim $70 % [102] 30 min 符号回归 风电、湿度、温度、风速 存在隐含相关性 RMSE: 12.6 % [104] 4 h 谱聚类、回声状态网络 风速、温度 平稳、存在谱特征 MAPE: 8.74 %$ \sim $11.86 % [105] 3 h 软计算、距离测度 风速、风向、温度 相似天气模式 MAPE: 9.23 %$ \sim $10.77 % [107] 1.5 h NWP、自回归、神经网络、卡尔曼滤波 风速、风电、气压、温度、预报风速 预报风速转化风电、多模型筛选、平稳 RMSE:比常值法低7 %$ \sim $65 %, 平均约48 % [108] 24 h NWP、神经网络、小波分解 风电、预报风速、温度、气压、湿度 预报风速转化风电、周期性 NMAE: 10.98 %$ \sim $18.88 % [109] 24 h NWP、高斯过程 风速、温度、湿度、气压 高斯性、预报风速转化风电 NMAE: 7.6 %$ \sim $11.12 % [111] 48 h NWP、神经网络 温度、预报风速 地表均匀 MAE: 1.8 m/s [112] 24 h NWP、模式分析 预测风速 季节规律 MAE: 2.6 m/s$ \sim $3.0 m/s [113] 48 h NWP、自适应重采样 风电、预报风速 预报风速转化置信区间 NMAE:不超过1.5 % [114] 36 h NWP、神经网络、帝国竞争算法 风电、预报的风速、湿度、温度 预报风速转化风电 RMSE: 17.2 % [115] 24 h NWP、神经网络、卡尔曼滤波 预报的风速、温度、气压、湿度 预报风速转化风电、短期平稳 NRMSE: 16.47 % [116] 36 h NWP、卡尔曼滤波、自动调谐 风电、预报风速 短期平稳、风速转化风电 RMSE:比常值法低约60 % [117] 24 h 卡尔曼滤波、$k$近邻分类 风速、风向、气温、气压、相对湿度 相似天气模式、长期非平稳 MAPE: 7.083 % [118] 31 d 混沌序列、k均值聚类 风速、气压、温度、湿度 相似天气模式、长期非平稳 MAPE: 19.21 % [119] 50 d 软计算、模型融合 风速、温度 非平稳、多模型 NMSE: 0.6515 [123] 36 h NWP、径向基网络、自组织匹配 风电、预报风速 长期平稳性、预报风速转化风电 NRMSE: 9.77 %$ \sim $13.44 % [124] 48 h NWP、粒子群优化、神经网络 风电、预报的风速、温度、湿度 预报风速转化风电、多模型筛选 NRMSE: 16.58 % [125] 72 h 卡尔曼滤波、分位点回归 风速、风电、地表粗糙度 长期平稳、地表均匀 NMAE:约10 %$ \sim $20 %
下载: 导出CSV
表 4 风电场群的部分发电预测方法对比
Table 4 Comparison among part of wind power forecasting methods for wind farm group
文献 尺度 方法 输入 适用 误差 [35] 4 h NWP、粒子群优化、神经网络 风电、预报的风速、温度、湿度 预报风速转化风电、多模型筛选 — [129] 1天 极限学习机、季节ARIMA 风速 惯性、平稳、季节周期 MAPE: 26.68 % [131] 3 h 自适应神经模糊扰动、小波变换、粒子群优化 风电 非平稳、子序列可预测性 MAPE: 5.81 %不等 [134] 1 h 神经网络、贝叶斯方法 风电 平稳、先验规律 RMSE:比常值法高7 %不等 [136] 1月 神经网络 风速 长期平稳 MAPE: 14.13 % [138] 12月 神经网络 风速 长期平稳 MAPE: 8.9 % [139] 12月 测量关联预测、韦伯分布 风速 空间相关性、分布平稳 NMAE: 4.8 % [141] 60天 测量关联预测 风速 空间相关性 RMSE: 0.78 % [142] 10 min 神经网络 温度、气压、辐射、风速 平稳 MAPE: 4.55 % [145] 24 h 嵌套NWP 风电密度、风速分布、预报风速 分布平稳 RMSE: 2 m/s [146] 24 h NWP、卡尔曼滤波 风速、预报风速 平稳 MAE: 2.33 m/s [147] 12 h NWP、统计升尺度、卡尔曼滤波 风电、风速、预报风速 风速转化风电、局部与总体变化相似 NRMSE: 5.51 % [148] 12 h NWP、系数贝叶斯、高斯过程 风速、风电、预测风速 平稳、先验规律、风速转化风电 MAPE: 29.87 % [149] 6 h NWP、扭曲高斯分布 风速、风电、预测风速 多模型选择、风速转化风电 MAPE: 10 % [152] 12月 NWP、测量关联预测 风速、风电、预测风速 空间相关性、风速转化风电 NMAE:风速2.8 %, 风电7.9 %
下载: 导出CSV
-
[1] 中国可再生能源学会风能专委会. 2016年中国风电装机容量统计.风能, 2017, 2:32-44 http://d.old.wanfangdata.com.cn/Periodical/fengn201702018Chinese Wind Energy Association. Statistics of Installed Wind Power Capacity of China in 2016. Wind Energy, 2017, 2:32-44 http://d.old.wanfangdata.com.cn/Periodical/fengn201702018 [2] Bouffard F, Galiana F D. Stochastic security for operations planning with significant wind power generation. In: Proceedings of the 2008 IEEE Power and Energy Society General Meeting-Conversion and Delivery of Electrical Energy in the 21st Century. Pittsburgh, PA, USA: IEEE, 2008. 1-11 https://ieeexplore.ieee.org/document/4470561/ [3] Colak I, Sagiroglu S, Yesilbudak M. Data mining and wind power prediction:a literature review. Renewable Energy, 2012, 46:241-247 doi: 10.1016/j.renene.2012.02.015 [4] Soman S S, Zareipour H, Malik O, Mandal P. A review of wind power and wind speed forecasting methods with different time horizons. In: Proceedings of the 2010 North American Power Symposium (NAPS). Arlington, Texas, USA: IEEE, 2010. 1-8 https://ieeexplore.ieee.org/document/5619586 [5] Ata R. Artificial neural networks applications in wind energy systems:a review. Renewable and Sustainable Energy Reviews, 2015, 49:534-562 doi: 10.1016/j.rser.2015.04.166 [6] Okumus I, Dinler A. Current status of wind energy forecasting and a hybrid method for hourly predictions. Energy Conversion and Management, 2016, 123:362-371 doi: 10.1016/j.enconman.2016.06.053 [7] 彭小圣, 熊磊, 文劲宇, 程时杰, 邓迪元, 冯双磊, 等.风电集群短期及超短期功率预测精度改进方法综述.中国电机工程学报, 2016, 36(23):6315-6326 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20162016122200097770Peng Xiao-Sheng, Xiong Lei, Wen Jin-Yu, Cheng Shi-Jie, Deng Di-Yuan, Feng Shuang-Lei, et al. A summary of the state of the art for short-term and ultra-short-term wind power prediction of regions. Proceedings of the CSEE, 2016, 36(23):6315-6326 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20162016122200097770 [8] 叶林, 赵永宁.基于空间相关性的风电功率预测研究综述.电力系统自动化, 2014, 38(14):126-135 doi: 10.7500/AEPS20130911004Ye Lin, Zhao Yong-Ning. A review on wind power prediction based on spatial correlation approach. Automation of Electric Power Systems, 2014, 38(14):126-135 doi: 10.7500/AEPS20130911004 [9] Jiang Z Y, Jia Q S, Guan X H. Review of wind power forecasting methods: from multi-spatial and temporal perspective. In: Proceedings of the 36th Chinese Control Conference. Dalian, China: IEEE, 2017. 10576-10583 [10] Kusiak A, Zhang Z J, Verma A. Prediction, operations, and condition monitoring in wind energy. Energy, 2013, 60:1-12 doi: 10.1016/j.energy.2013.07.051 [11] Foley A M, Leahy P G, Marvuglia A, McKeogh E J. Current methods and advances in forecasting of wind power generation. Renewable Energy, 2012, 37(1):1-8 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=def50e9bc83411d5549c91e2f486e467 [12] Jung J, Broadwater R P. Current status and future advances for wind speed and power forecasting. Renewable and Sustainable Energy Reviews, 2014, 31:762-777 doi: 10.1016/j.rser.2013.12.054 [13] Wang J Z, Song Y L, Liu F, Hou R. Analysis and application of forecasting models in wind power integration:a review of multi-step-ahead wind speed forecasting models. Renewable and Sustainable Energy Reviews, 2016, 60:960-981 doi: 10.1016/j.rser.2016.01.114 [14] Carta J A, Velázquez S, Cabrera P. A review of measure-correlate-predict (MCP) methods used to estimate long-term wind characteristics at a target site. Renewable and Sustainable Energy Reviews, 2013, 27:362-400 doi: 10.1016/j.rser.2013.07.004 [15] 叶林, 杨丹萍, 赵永宁.风电场风能资源评估的测量-关联-预测方法综述.电力系统自动化, 2016, 40(3):140-151 http://d.old.wanfangdata.com.cn/Periodical/dlxtzdh201603022Ye Lin, Yang Dan-Ping, Zhao Yong-Ning. Overview of wind resource measure-correlate-predict methods for wind farms. Automation of Electric Power Systems, 2016, 40(3):140-151 http://d.old.wanfangdata.com.cn/Periodical/dlxtzdh201603022 [16] Xiao L, Wang J Z, Dong Y, Wu J. Combined forecasting models for wind energy forecasting:a case study in China. Renewable and Sustainable Energy Reviews, 2015, 44:271-288 doi: 10.1016/j.rser.2014.12.012 [17] Tascikaraoglu A, Uzunoglu M. A review of combined approaches for prediction of short-term wind speed and power. Renewable and Sustainable Energy Reviews, 2014, 34:243-254 doi: 10.1016/j.rser.2014.03.033 [18] Zhang Y, Wang J X, Wang X F. Review on probabilistic forecasting of wind power generation. Renewable and Sustainable Energy Reviews, 2014, 32:255-270 doi: 10.1016/j.rser.2014.01.033 [19] Yan J, Liu Y Q, Han S, Wang Y M, Feng S L. Reviews on uncertainty analysis of wind power forecasting. Renewable and Sustainable Energy Reviews, 2015, 52:1322-1330 doi: 10.1016/j.rser.2015.07.197 [20] Gallego-Castillo C, Cuerva-Tejero A, Lopez-Garcia O. A review on the recent history of wind power ramp forecasting. Renewable and Sustainable Energy Reviews, 2015, 52:1148-1157 doi: 10.1016/j.rser.2015.07.154 [21] 欧阳庭辉, 查晓明, 秦亮, 熊一, 黄鹤鸣.基于相似性修正的风电功率爬坡事件预测方法.中国电机工程学报, 2017, 37(2):572580 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201702025.htmOuyang Ting-Hui, Zha Xiao-Ming, Qin Liang, Xiong Yi, Huang He-Ming. Wind power ramps prediction method based on amendment of similar events. Proceedings of the CSEE, 2017, 37(2):572-580 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201702025.htm [22] Mohammadi K, Shamshirband S, Yee P L, Petković D, Zamani M, Ch S. Predicting the wind power density based upon extreme learning machine. Energy, 2015, 86:232239 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=2963aa64a761436f3ed56c0d39387325 [23] Yan J, Zhang H, Liu Y Q, Han S, Li L, Lu Z X. Forecasting the high penetration of wind power on multiple scales using multi-to-multi mapping. IEEE Transactions on Power Systems, 2018, 33(3):3276-3284 doi: 10.1109/TPWRS.2017.2787667 [24] Wang Y, Meng Q H, Li H X, Zeng M. Multi-scale analysis of single-point wind signals in outdoor near-surface environments. In: Proceedings of the 31st Chinese Control Conference. Hefei, China: IEEE, 2012. 3880-3885 https://ieeexplore.ieee.org/document/6057295 [25] Riahy G H, Abedi M. Short term wind speed forecasting for wind turbine applications using linear prediction method. Renewable Energy, 2008, 33(1):35-41 https://www.sciencedirect.com/science/article/pii/S0960148107000237 [26] Croonenbroeck C, Dahl C M. Accurate medium-term wind power forecasting in a censored classification framework. Energy, 2014, 73:221-232 doi: 10.1016/j.energy.2014.06.013 [27] Liu H P, Shi J, Erdem E. Prediction of wind speed time series using modified Taylor Kriging method. Energy, 2010, 35(12):4870-4879 doi: 10.1016/j.energy.2010.09.001 [28] Tang J, Brouste A, Tsui K L. Some improvements of wind speed Markov chain modeling. Renewable Energy, 2015, 81:52-56 doi: 10.1016/j.renene.2015.03.005 [29] Bossanyi E A. Short-term wind prediction using Kalman filters. Wind Engineering, 1985, 9(1):1-8 [30] Cadenas E, Jaramillo O A, Rivera W. Analysis and forecasting of wind velocity in chetumal, quintana roo, using the single exponential smoothing method. Renewable Energy, 2010, 35(5):925-930 doi: 10.1016/j.renene.2009.10.037 [31] Kavasseri R G, Seetharaman K. Day-ahead wind speed forecasting using f-ARIMA models. Renewable Energy, 2009, 34(5):1388-1393 doi: 10.1016/j.renene.2008.09.006 [32] Han L, Romero C E, Yao Z. Wind power forecasting based on principle component phase space reconstruction. Renewable Energy, 2015, 81:737-744 doi: 10.1016/j.renene.2015.03.037 [33] 陈德辉, 薛纪善.数值天气预报业务模式现状与展望.气象学报, 2004, 62(5):623-633 http://d.old.wanfangdata.com.cn/Periodical/qxxb200405009Chen De-Hui, Xue Ji-Shan. An overview on recent progresses of the operational numerical weather prediction models. Acta Meteorologica Sinica, 2004, 62(5):623-633 http://d.old.wanfangdata.com.cn/Periodical/qxxb200405009 [34] 王建成, 杨苹, 杨曦.基于数值天气预报的风电功率预测建模研究.可再生能源, 2013, 31(2):34-38 http://d.old.wanfangdata.com.cn/Periodical/ncny201302008Wang Jian-Cheng, Yang Ping, Yang Xi. Research on wind power prediction modeling based on numerical weather prediction. Renewable Energy Resources, 2013, 31(2):34-38 http://d.old.wanfangdata.com.cn/Periodical/ncny201302008 [35] Li P, Guan X H, Wu J. Aggregated wind power generation probabilistic forecasting based on particle filter. Energy Conversion and Management, 2015, 96:579-587 doi: 10.1016/j.enconman.2015.03.021 [36] Khalid M, Savkin A V. A method for short-term wind power prediction with multiple observation points. IEEE Transactions on Power Systems, 2012, 27(2):579-586 doi: 10.1109/TPWRS.2011.2160295 [37] Lazić L, Pejanović G, Živković M, Ilić L. Improved wind forecasts for wind power generation using the Eta model and MOS (model output statistics) method. Energy, 2014, 73:567-574 doi: 10.1016/j.energy.2014.06.056 [38] Peng H W, Liu F R, Yang X F. A hybrid strategy of short term wind power prediction. Renewable Energy, 2013, 50:590-595 doi: 10.1016/j.renene.2012.07.022 [39] 国家能源局.风电场功率预测预报管理暂行办法.太阳能, 2011, (14):6-7 http://d.old.wanfangdata.com.cn/Periodical/tyn201114002National Energy Administration. The interim measures on wind power forecasting management. Solar Energy, 2011, (14):6-7 http://d.old.wanfangdata.com.cn/Periodical/tyn201114002 [40] 周先春, 林万涛, 林一骅, 姚静荪, 莫嘉琪.一类扰动洛伦兹系统的解法.物理学报, 2011, 60(11):110207 doi: 10.7498/aps.60.110207Zhou Xian-Chun, Lin Wan-Tao, Lin Yi-Hua, Yao Jing-Sun, Mo Jia-Qi. A method of solving a class of disturbed Lorenz system. Acta Physica Sinica, 2011, 60(11):110207 doi: 10.7498/aps.60.110207 [41] He M, Yang L, Zhang J S, Vittal V. A spatio-temporal analysis approach for short-term forecast of wind farm generation. IEEE Transactions on Power Systems, 2014, 29(4):1611-1622 doi: 10.1109/TPWRS.2014.2299767 [42] Jiang Y, Song Z, Kusiak A. Very short-term wind speed forecasting with Bayesian structural break model. Renewable Energy, 2013, 50:637-647 doi: 10.1016/j.renene.2012.07.041 [43] Yang L, He M, Zhang J S, Vittal V. Support-vector-machine-enhanced Markov model for short-term wind power forecast. IEEE Transactions on Sustainable Energy, 2015, 6(3):791-799 http://www.springerlink.com/openurl.asp?id=doi:10.1007/978-3-319-12319-6_3 [44] Song Z, Jiang Y, Zhang Z J. Short-term wind speed forecasting with Markov-switching model. Applied Energy, 2014, 130:103-112 doi: 10.1016/j.apenergy.2014.05.026 [45] Kani S A P, Ardehali M M. Very short-term wind speed prediction:a new artificial neural network-Markov chain model. Energy Conversion and Management, 2011, 52(1):738-745 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0224119933/ [46] Sfetsos A. A novel approach for the forecasting of mean hourly wind speed time series. Renewable Energy, 2002, 27(2):163-174 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=6fad6c6ac7854c14fc12871ff2851309 [47] Erdem E, Shi J. ARMA based approaches for forecasting the tuple of wind speed and direction. Applied Energy, 2011, 88(4):1405-1414 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=30d79b742deccbd843c98d30f76b9f84 [48] Khosravi A, Nahavandi S. Combined nonparametric prediction intervals for wind power generation. IEEE Transactions on Sustainable Energy, 2013, 4(4):849-856 https://ieeexplore.ieee.org/document/6495743/ [49] Khosravi A, Nahavandi S. An optimized mean variance estimation method for uncertainty quantification of wind power forecasts. International Journal of Electrical Power and Energy Systems, 2014, 61:446-454 doi: 10.1016/j.ijepes.2014.03.060 [50] Chen K L, Yu J. Short-term wind speed prediction using an unscented Kalman filter based state-space support vector regression approach. Applied Energy, 2014, 113:690-705 doi: 10.1016/j.apenergy.2013.08.025 [51] Monfared M, Rastegar H, Kojabadi H M. A new strategy for wind speed forecasting using artificial intelligent methods. Renewable Energy, 2009, 34(3):845-848 doi: 10.1016/j.renene.2008.04.017 [52] Chitsaz H, Amjady N, Zareipour H. Wind power forecast using wavelet neural network trained by improved Clonal selection algorithm. Energy Conversion and Management, 2015, 89:588-598 doi: 10.1016/j.enconman.2014.10.001 [53] Li G, Shi J. On comparing three artificial neural networks for wind speed forecasting. Applied Energy, 2010, 87(7):2313-2320 doi: 10.1016/j.apenergy.2009.12.013 [54] Zhou J Y, Shi J, Li G. Fine tuning support vector machines for short-term wind speed forecasting. Energy Conversion and Management, 2011, 52(4):1990-1998 doi: 10.1016/j.enconman.2010.11.007 [55] Troncoso A, Salcedo-Sanz S, Casanova-Mateo C, Riquelme J C, Prieto L. Local models-based regression trees for very short-term wind speed prediction. Renewable Energy, 2015, 81:589-598 doi: 10.1016/j.renene.2015.03.071 [56] Lahouar A, Slama J B H. Hour-ahead wind power forecast based on random forests. Renewable Energy, 2017, 109:529-541 doi: 10.1016/j.renene.2017.03.064 [57] Abdel-Aal R E, Elhadidy M A, Shaahid S M. Modeling and forecasting the mean hourly wind speed time series using GMDH-based abductive networks. Renewable Energy, 2009, 34(7):1686-1699 doi: 10.1016/j.renene.2009.01.001 [58] Blonbou R. Very short-term wind power forecasting with neural networks and adaptive Bayesian learning. Renewable Energy, 2011, 36(3):1118-1124 doi: 10.1016/j.renene.2010.08.026 [59] Li G, Shi J, Zhou J Y. Bayesian adaptive combination of short-term wind speed forecasts from neural network models. Renewable Energy, 2011, 36(1):352-359 https://www.sciencedirect.com/science/article/pii/S0960148110003228 [60] Shi J, Guo J M, Zheng S T. Evaluation of hybrid forecasting approaches for wind speed and power generation time series. Renewable and Sustainable Energy Reviews, 2012, 16(5):3471-3480 doi: 10.1016/j.rser.2012.02.044 [61] Wang J Z, Heng J N, Xiao L Y, Wang C. Research and application of a combined model based on multi-objective optimization for multi-step ahead wind speed forecasting. Energy, 2017, 125:591-613 doi: 10.1016/j.energy.2017.02.150 [62] Liu H, Tian H Q, Li Y F. Comparison of two new ARIMA-ANN and ARIMA-Kalman hybrid methods for wind speed prediction. Applied Energy, 2012, 98:415-424 doi: 10.1016/j.apenergy.2012.04.001 [63] Liu H, Tian H Q, Pan D F, Li Y F. Forecasting models for wind speed using wavelet, wavelet packet, time series and Artificial Neural Networks. Applied Energy, 2013, 107:191-208 doi: 10.1016/j.apenergy.2013.02.002 [64] Bigdeli N, Afshar K, Gazafroudi A S, Ramandi M Y. A comparative study of optimal hybrid methods for wind power prediction in wind farm of Alberta, Canada. Renewable and Sustainable Energy Reviews, 2013, 27:20-29 doi: 10.1016/j.rser.2013.06.022 [65] Liu H, Tian H Q, Chen C, Li Y F. A hybrid statistical method to predict wind speed and wind power. Renewable Energy, 2010, 35(8):1857-1861 doi: 10.1016/j.renene.2009.12.011 [66] Liu H, Tian H Q, Li Y F. Four wind speed multi-step forecasting models using extreme learning machines and signal decomposing algorithms. Energy Conversion and Management, 2015, 100:16-22 doi: 10.1016/j.enconman.2015.04.057 [67] Liu H, Tian H Q, Li Y F. Comparison of new hybrid FEEMD-MLP, FEEMD-ANFIS, Wavelet Packet-MLP and Wavelet Packet-ANFIS for wind speed predictions. Energy Conversion and Management, 2015, 89:1-11 doi: 10.1016/j.enconman.2014.09.060 [68] Hu J M, Wang J Z, Ma K L. A hybrid technique for short-term wind speed prediction. Energy, 2015, 81:563-574 doi: 10.1016/j.energy.2014.12.074 [69] Liu H, Tian H Q, Chen C, Li Y F. An experimental investigation of two Wavelet-MLP hybrid frameworks for wind speed prediction using GA and PSO optimization. International Journal of Electrical Power and Energy Systems, 2013, 52:161-173 doi: 10.1016/j.ijepes.2013.03.034 [70] Zeng J W, Qiao W. Short-term wind power prediction using a wavelet support vector machine. IEEE Transactions on Sustainable Energy, 2012, 3(2):255-264 http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201204007 [71] Liu H, Chen C, Tian H Q, Li Y F. A hybrid model for wind speed prediction using empirical mode decomposition and artificial neural networks. Renewable Energy, 2012, 48:545-556 doi: 10.1016/j.renene.2012.06.012 [72] Liu H, Tian H Q, Li Y F, Zhang L. Comparison of four Adaboost algorithm based artificial neural networks in wind speed predictions. Energy Conversion and Management, 2015, 92:67-81 doi: 10.1016/j.enconman.2014.12.053 [73] Zhang W Y, Qu Z X, Zhang K Q, Mao W Q, Ma Y N, Fan X. A combined model based on CEEMDAN and modified flower pollination algorithm for wind speed forecasting. Energy Conversion and Management, 2017, 136:439-451 doi: 10.1016/j.enconman.2017.01.022 [74] De Giorgi M G, Ficarella A, Tarantino M. Error analysis of short term wind power prediction models. Applied Energy, 2011, 88(4):1298-1311 http://www.sciencedirect.com/science/article/pii/S030626191000437X [75] Quan H, Srinivasan D, Khosravi A. Short-term load and wind power forecasting using neural network-based prediction intervals. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(2):303-315 doi: 10.1109/TNNLS.2013.2276053 [76] Bhaskar K, Singh S N. AWNN-assisted wind power forecasting using feed-forward neural network. IEEE Transactions on Sustainable Energy, 2012, 3(2):306-315 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0227437929/ [77] Shukur O B, Lee M H. Daily wind speed forecasting through hybrid KF-ANN model based on ARIMA. Renewable Energy, 2015, 76:637-647 doi: 10.1016/j.renene.2014.11.084 [78] Cadenas E, Rivera W. Wind speed forecasting in the south coast of Oaxaca, México. Renewable Energy, 2007, 32(12):2116-2128 doi: 10.1016/j.renene.2006.10.005 [79] Guo Z H, Zhao J, Zhang W Y, Wang J Z. A corrected hybrid approach for wind speed prediction in Hexi Corridor of China. Energy, 2011, 36(3):1668-1679 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=1f8e3a8d67b87d01a903a72c0d0d4ff2 [80] Ren C, An N, Wang J Z, Li L, Hu B, Shang D. Optimal parameters selection for BP neural network based on particle swarm optimization:a case study of wind speed forecasting. Knowledge-Based Systems, 2014, 56:226-239 doi: 10.1016/j.knosys.2013.11.015 [81] Bessa R J, Miranda V, Gama J. Entropy and correntropy against minimum square error in offline and online three-day ahead wind power forecasting. IEEE Transactions on Power Systems, 2009, 24(4):1657-1666 doi: 10.1109/TPWRS.2009.2030291 [82] Chang G W, Lu H J, Chang Y R, Lee Y D. An improved neural network-based approach for short-term wind speed and power forecast. Renewable Energy, 2017, 105:301311 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=17095c0188f68926c9b9b2f0ca0b61b2 [83] Haque A U, Nehrir M H, Mandal P. A hybrid intelligent model for deterministic and quantile regression approach for probabilistic wind power forecasting. IEEE Transactions on Power Systems, 2014, 29(4):1663-1672 doi: 10.1109/TPWRS.2014.2299801 [84] Hu J M, Wang J Z, Zeng G W. A hybrid forecasting approach applied to wind speed time series. Renewable Energy, 2013, 60:185-194 doi: 10.1016/j.renene.2013.05.012 [85] Guo Z H, Zhao W G, Lu H Y, Wang J Z. Multi-step forecasting for wind speed using a modified EMD-based artificial neural network model. Renewable Energy, 2012, 37(1):241-249 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cb47941592517b3fe9b5f1dbf0ff595a [86] Wang J Z, Wang Y, Jiang P. The study and application of a novel hybrid forecasting model -a case study of wind speed forecasting in China. Applied Energy, 2015, 143:472-488 doi: 10.1016/j.apenergy.2015.01.038 [87] Skittides C, Früh W G. Wind forecasting using principal component analysis. Renewable Energy, 2014, 69:365374 http://d.old.wanfangdata.com.cn/Periodical/jdq201411008 [88] Yeh W C, Yeh Y M, Chang P C, Ke Y C, Chung V. Forecasting wind power in the Mai Liao Wind Farm based on the multi-layer perceptron artificial neural network model with improved simplified swarm optimization. International Journal of Electrical Power and Energy Systems, 2014, 55:741-748 doi: 10.1016/j.ijepes.2013.10.001 [89] Hu Q H, Su P Y, Yu D R, Liu J F. Pattern-based wind speed prediction based on generalized principal component analysis. IEEE Transactions on Sustainable Energy, 2014, 5(3):866-874 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c1474b409233a81c6360fc1ee5fb65c2 [90] Kusiak A, Zheng H Y, Song Z. Models for monitoring wind farm power. Renewable Energy, 2009, 34(3):583-590 [91] Salcedo-Sanz S, Pastor-Sánchez A, Del Ser J, Prieto L, Geem Z W. A coral reefs optimization algorithm with harmony search operators for accurate wind speed prediction. Renewable Energy, 2015, 75:93-101 doi: 10.1016/j.renene.2014.09.027 [92] Lee D, Baldick R. Short-term wind power ensemble prediction based on Gaussian processes and neural networks. IEEE Transactions on Smart Grid, 2014, 5(1):501-510 doi: 10.1109/TSG.2013.2280649 [93] Azad H B, Mekhilef S, Ganapathy V G. Long-term wind speed forecasting and general pattern recognition using neural networks. IEEE Transactions on Sustainable Energy, 2014, 5(2):546-553 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0232093054/ [94] Wang J Z, Qin S S, Zhou Q P, Jiang H Y. Medium-term wind speeds forecasting utilizing hybrid models for three different sites in Xinjiang, China. Renewable Energy, 2015, 76:91-101 doi: 10.1016/j.renene.2014.11.011 [95] Zhang W Y, Wu J, Wang J Z, Zhao W G, Shen L. Performance analysis of four modified approaches for wind speed forecasting. Applied Energy, 2012, 99:324-333 doi: 10.1016/j.apenergy.2012.05.029 [96] Akçay H, Filik T. Short-term wind speed forecasting by spectral analysis from long-term observations with missing values. Applied Energy, 2017, 191:653-662 doi: 10.1016/j.apenergy.2017.01.063 [97] Yu J, Chen K L, Mori J, Rashid M M. A Gaussian mixture copula model based localized Gaussian process regression approach for long-term wind speed prediction. Energy, 2013, 61:673-686 doi: 10.1016/j.energy.2013.09.013 [98] Liu Y Q, Gao X L, Yan J, Han S, Infield D G. Clustering methods of wind turbines and its application in short-term wind power forecasts. Journal of Renewable and Sustainable Energy, 2014, 6(5):053119 doi: 10.1063/1.4898361 [99] Cadenas E, Rivera W. Wind speed forecasting in three different regions of Mexico, using a hybrid ARIMA-ANN model. Renewable Energy, 2010, 35(12):2732-2738 doi: 10.1016/j.renene.2010.04.022 [100] Liu J Q, Wang X R, Lu Y. A novel hybrid methodology for short-term wind power forecasting based on adaptive neuro-fuzzy inference system. Renewable Energy, 2017, 103:620-629 doi: 10.1016/j.renene.2016.10.074 [101] Zhang Y G, Yang J Y, Wang K C, Wang Z P, Wang Y D. Improved wind prediction based on the Lorenz system. Renewable Energy, 2015, 81:219-226 doi: 10.1016/j.renene.2015.03.039 [102] Vladislavleva E, Friedrich T, Neumann F, Wagner M. Predicting the energy output of wind farms based on weather data:important variables and their correlation. Renewable Energy, 2013, 50:236-243 doi: 10.1016/j.renene.2012.06.036 [103] Took C C, Strbac G, Aihara K, Mandic D P. Quaternion-valued short-term joint forecasting of three-dimensional wind and atmospheric parameters. Renewable Energy, 2011, 36(6):1754-1760 doi: 10.1016/j.renene.2010.12.013 [104] Liu D, Wang J L, Wang H. Short-term wind speed forecasting based on spectral clustering and optimised echo state networks. Renewable Energy, 2015, 78:599-608 doi: 10.1016/j.renene.2015.01.022 [105] Haque A U, Mandal P, Kaye M E, Meng J L, Chang L C, Senjyu T. A new strategy for predicting short-term wind speed using soft computing models. Renewable and Sustainable Energy Reviews, 2012, 16(7):4563-4573 doi: 10.1016/j.rser.2012.05.042 [106] Yesilbudak M, Sagiroglu S, Colak I. A novel implementation of kNN classifier based on multi-tupled meteorological input data for wind power prediction. Energy Conversion and Management, 2017, 135:434-444 doi: 10.1016/j.enconman.2016.12.094 [107] Ramirez-Rosado I J, Fernandez-Jimenez L A, Monteiro C, Sousa J, Bessa R. Comparison of two new short-term wind-power forecasting systems. Renewable Energy, 2009, 34(7):1848-1854 doi: 10.1016/j.renene.2008.11.014 [108] De Giorgi M G, Ficarella A, Tarantino M. Assessment of the benefits of numerical weather predictions in wind power forecasting based on statistical methods. Energy, 2011, 36(7):3968-3978 doi: 10.1016/j.energy.2011.05.006 [109] Chen N Y, Qian Z, Nabney I T, Meng X F. Wind power forecasts using Gaussian processes and numerical weather prediction. IEEE Transactions on Power Systems, 2014, 29(2):656-665 doi: 10.1109/TPWRS.2013.2282366 [110] Fang S C, Chiang H D. A high-accuracy wind power forecasting model. IEEE Transactions on Power Systems, 2017, 32(2):1589-1590 https://ieeexplore.ieee.org/document/7497013 [111] Salcedo-Sanz S, Pérez-Bellido Á M, Ortiz-García E G, Portilla-Figueras A, Prieto L, Paredes D. Hybridizing the fifth generation mesoscale model with artificial neural networks for short-term wind speed prediction. Renewable Energy, 2009, 34(6):1451-1457 doi: 10.1016/j.renene.2008.10.017 [112] Cheng W Y Y, Liu Y B, Liu Y W, Zhang Y X, Mahoney W P, Warner T T. The impact of model physics on numerical wind forecasts. Renewable Energy, 2013, 55:347-356 doi: 10.1016/j.renene.2012.12.041 [113] Pinson P, Kariniotakis G. Conditional prediction intervals of wind power generation. IEEE Transactions on Power Systems, 2010, 25(4):1845-1856 doi: 10.1109/TPWRS.2010.2045774 [114] Ghadi M J, Gilani S H, Afrakhte H, Baghramian A. A novel heuristic method for wind farm power prediction:a case study. International Journal of Electrical Power and Energy Systems, 2014, 63:962-970 doi: 10.1016/j.ijepes.2014.07.008 [115] Zhao P, Wang J F, Xia J R, Dai Y P, Sheng Y X, Yue J. Performance evaluation and accuracy enhancement of a day-ahead wind power forecasting system in China. Renewable Energy, 2012, 43:234-241 doi: 10.1016/j.renene.2011.11.051 [116] Poncela M, Poncela P, Perán J R. Automatic tuning of Kalman filters by maximum likelihood methods for wind energy forecasting. Applied Energy, 2013, 108:349-362 doi: 10.1016/j.apenergy.2013.03.041 [117] Yesilbudak M, Sagiroglu S, Colak I. A new approach to very short term wind speed prediction using k-nearest neighbor classification. Energy Conversion and Management, 2013, 69:77-86 doi: 10.1016/j.enconman.2013.01.033 [118] Guo Z H, Chi D Z, Wu J, Zhang W Y. A new wind speed forecasting strategy based on the chaotic time series modelling technique and the Apriori algorithm. Energy Conversion and Management, 2014, 84:140-151 doi: 10.1016/j.enconman.2014.04.028 [119] Bouzgou H, Benoudjit N. Multiple architecture system for wind speed prediction. Applied Energy, 2011, 88(7):2463-2471 doi: 10.1016/j.apenergy.2011.01.037 [120] Togelou A, Sideratos G, Hatziargyriou N D. Wind power forecasting in the absence of historical data. IEEE Transactions on Sustainable Energy, 2012, 3(3):416-421 doi: 10.1109/TSTE.2012.2188049 [121] Sideratos G, Hatziargyriou N D. Probabilistic wind power forecasting using radial basis function neural networks. IEEE Transactions on Power Systems, 2012, 27(4):17881796 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0227430087/ [122] Sideratos G, Hatziargyriou N D. An advanced statistical method for wind power forecasting. IEEE Transactions on Power Systems, 2007, 22(1):258-265 doi: 10.1109/TPWRS.2006.889078 [123] Sideratos G, Hatziargyriou N D. Wind power forecasting focused on extreme power system events. IEEE Transactions on Sustainable Energy, 2012, 3(3):445-454 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=74dcdc2b62e36196dcfa4d8793c42f1e [124] Amjady N, Keynia F, Zareipour H. Wind power prediction by a new forecast engine composed of modified hybrid neural network and enhanced particle swarm optimization. IEEE Transactions on Sustainable Energy, 2011, 2(3):265-276 https://ieeexplore.ieee.org/document/5713273 [125] Mahoney W P, Parks K, Wiener G, Liu Y B, Myers W L, Sun J Z, et al. A wind power forecasting system to optimize grid integration. IEEE Transactions on Sustainable Energy, 2012, 3(4):670-682 doi: 10.1109/TSTE.2012.2201758 [126] Alessandrini S, Sperati S, Pinson P. A comparison between the ECMWF and COSMO ensemble prediction systems applied to short-term wind power forecasting on real data. Applied Energy, 2013, 107:271-280 doi: 10.1016/j.apenergy.2013.02.041 [127] Bessa R J, Miranda V, Botterud A, Wang J H, Constantinescu E M. Time adaptive conditional kernel density estimation for wind power forecasting. IEEE Transactions on Sustainable Energy, 2012, 3(4):660-669 doi: 10.1109/TSTE.2012.2200302 [128] Giebel G, Brownsword R, Kariniotakis G, Denhard M, Draxl C. The State-of-the-Art in Short-Term Prediction of Wind Power: A Literature Overview (2nd edition). ANEMOS, 2011. [129] Wang J Z, Hu J M, Ma K L, Zhang Y X. A self-adaptive hybrid approach for wind speed forecasting. Renewable Energy, 2015, 78:374-385 doi: 10.1016/j.renene.2014.12.074 [130] Catalão J P S, Pousinho H M I, Mendes V M F. Short-term wind power forecasting in Portugal by neural networks and wavelet transform. Renewable Energy, 2011, 36(4):12451251 http://www.sciencedirect.com/science/article/pii/S0960148110004477 [131] Osorió G J, Matias J C O, Catalão J P S. Short-term wind power forecasting using adaptive neuro-fuzzy inference system combined with evolutionary particle swarm optimization, wavelet transform and mutual information. Renewable Energy, 2015, 75:301-307 doi: 10.1016/j.renene.2014.09.058 [132] Pousinho H M I, Mendes V M F, Catalão J P S. A hybrid PSO-ANFIS approach for short-term wind power prediction in Portugal. Energy Conversion and Management, 2011, 52(1):397-402 http://www.sciencedirect.com/science/article/pii/S0196890410003080 [133] Catalão J P S, Pousinho H M I, Mendes V M F. Hybrid wavelet-PSO-ANFIS approach for short-term wind power forecasting in Portugal. IEEE Transactions on Sustainable Energy, 2011, 2(1):50-59 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC0211195329 [134] Blonbou R, Monjoly S, Dorville J F. An adaptive short-term prediction scheme for wind energy storage management. Energy Conversion and Management, 2011, 52(6):2412-2416 doi: 10.1016/j.enconman.2011.01.013 [135] Bessa R J, Miranda V, Botterud A, Zhou Z, Wang J. Time-adaptive quantile-copula for wind power probabilistic forecasting. Renewable Energy, 2012, 40(1):29-39 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=1ec44dd2493380c18b80c437ddc95319 [136] Bilgili M, Sahin B, Yasar A. Application of artificial neural networks for the wind speed prediction of target station using reference stations data. Renewable Energy, 2007, 32(14):2350-2360 doi: 10.1016/j.renene.2006.12.001 [137] Mohandes M A, Halawani T O, Rehman S, Hussain A A. Support vector machines for wind speed prediction. Renewable Energy, 2004, 29(6):939-947 doi: 10.1016/j.renene.2003.11.009 [138] Fadare D A. The application of artificial neural networks to mapping of wind speed profile for energy application in Nigeria. Applied Energy, 2010, 87(3):934-942 doi: 10.1016/j.apenergy.2009.09.005 [139] Weekes S M, Tomlin A S. Comparison between the bivariate Weibull probability approach and linear regression for assessment of the long-term wind energy resource using MCP. Renewable Energy, 2014, 68:529-539 doi: 10.1016/j.renene.2014.02.020 [140] Weekes S M, Tomlin A S. Data efficient measure-correlate-predict approaches to wind resource assessment for small-scale wind energy. Renewable Energy, 2014, 63:162-171 doi: 10.1016/j.renene.2013.08.033 [141] Lackner M A, Rogers A L, Manwell J F. The round robin site assessment method:a new approach to wind energy site assessment. Renewable Energy, 2008, 33(9):2019-2026 doi: 10.1016/j.renene.2007.12.011 [142] Ramasamy P, Chandel S S, Yadav A K. Wind speed prediction in the mountainous region of India using an artificial neural network model. Renewable Energy, 2015, 80:338-347 doi: 10.1016/j.renene.2015.02.034 [143] 陈颖, 孙荣富, 吴志坚, 丁杰, 陈志宝, 丁宇宇.基于统计升尺度方法的区域风电场群功率预测.电力系统自动化, 2013, 37(7):15 http://d.old.wanfangdata.com.cn/Periodical/dlxtzdh201307001Chen Ying, Sun Rong-Fu, Wu Zhi-Jian, Ding Jie, Chen Zhi-Bao, Ding Yu-Yu. A regional wind power forecasting method based on statistical upscaling approach. Automation of Electric Power Systems, 2013, 37(7):1-5 http://d.old.wanfangdata.com.cn/Periodical/dlxtzdh201307001 [144] Lazić L, Pejanović G, Živković M. Wind forecasts for wind power generation using the Eta model. Renewable Energy, 2010, 35(6):1236-1243 doi: 10.1016/j.renene.2009.10.028 [145] Al-Yahyai S, Charabi Y, Al-Badi A, Gastli A. Nested ensemble NWP approach for wind energy assessment. Renewable Energy, 2012, 37(1):150-160 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bb9de490c954fe1df88a7635886ee47a [146] Cassola F, Burlando M. Wind speed and wind energy forecast through Kalman filtering of numerical weather prediction model output. Applied Energy, 2012, 99:154-166 doi: 10.1016/j.apenergy.2012.03.054 [147] Lobo M G, Sanchez I. Regional wind power forecasting based on smoothing techniques, with application to the Spanish peninsular system. IEEE Transactions on Power Systems, 2012, 27(4):1990-1997 doi: 10.1109/TPWRS.2012.2189418 [148] Kou P, Gao F, Guan X H. Sparse online warped Gaussian process for wind power probabilistic forecasting. Applied Energy, 2013, 108:410-428 doi: 10.1016/j.apenergy.2013.03.038 [149] Kou P, Liang D L, Gao F, Gao L. Probabilistic wind power forecasting with online model selection and warped Gaussian process. Energy Conversion and Management, 2014, 84:649-663 doi: 10.1016/j.enconman.2014.04.051 [150] Sailor D J, Hu T, Li X, Rosen J N. A neural network approach to local downscaling of GCM output for assessing wind power implications of climate change. Renewable Energy, 2000, 19(3):359-378 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c8dc0d0ad5c6d661d98fbe4c93717ad2 [151] Mabel M C, Fernandez E. Analysis of wind power generation and prediction using ANN:a case study. Renewable Energy, 2008, 33(5):986-992 doi: 10.1016/j.renene.2007.06.013 [152] Weekes S M, Tomlin A S, Vosper S B, Skea A K, Gallani M L, Standen J J. Long-term wind resource assessment for small and medium-scale turbines using operational forecast data and measure-correlate-predict. Renewable Energy, 2015, 81:760-769 doi: 10.1016/j.renene.2015.03.066 [153] Dinler A. A new low-correlation MCP (measure-correlate-predict) method for wind energy forecasting. Energy, 2013, 63:152-160 doi: 10.1016/j.energy.2013.10.007 [154] Wan J, Ren G R, Liu J F, Hu Q H, Yu D R. Ultra-short-term wind speed prediction based on multi-scale predictability analysis. Cluster Computing, 2016, 19(2):741-755 doi: 10.1007/s10586-016-0554-0 [155] Jiang Z Y, Jia Q S, Guan X H. Optimization of sensor location for improving wind power prediction accuracy. In: Proceedings of the 13th IEEE Conference on Automation Science and Engineering (CASE). Xi'an, China: IEEE, 2017. 1220-1225 https://ieeexplore.ieee.org/document/8256267 [156] Guan X L, Xu Z B, Jia Q S, Liu K, Zhou Y D. Cyber-physical model for efficient and secured operation of CPES or energy Internet. Science China Information Sciences, 2018, 61(11):110201 doi: 10.1007/s11432-018-9621-8 [157] Jia Q S, Wu J J. On distributed event-based optimization for shared economy in cyber-physical energy systems. Science China Information Sciences, 2018, 61(11):110203 doi: 10.1007/s11432-018-9597-8 期刊类型引用(7)
1. 刘彦希,吴浩,蔡源,唐丹,宋弘. 基于改进EAST算法的电气设备铭牌文字检测. 四川轻化工大学学报(自然科学版). 2024(03): 42-50 .  百度学术
百度学术2. 常荣,唐力. 基于监督和卷积循环神经网络算法的电力设备铭牌识别技术. 电子器件. 2024(04): 1027-1032 . 百度学术3. 陈桃. AI视觉赋能工业质检的研究和实践. 江苏通信. 2024(04): 91-95 . 百度学术4. 石煌雄,胡洋,蒋作,潘文林,杨凡. 基于改进CTPN网络的电气铭牌文本区域检测. 云南民族大学学报(自然科学版). 2023(01): 96-102 . 百度学术5. 李雨,闫甜甜,周东生,魏小鹏. 基于注意力机制与深度多尺度特征融合的自然场景文本检测. 图学学报. 2023(03): 473-481 . 百度学术6. 董晨,郑禄,于舒,饶白云. 基于上下文感知与多尺度注意力的遥感变化检测. 软件导刊. 2023(11): 65-70 . 百度学术7. 姬壮伟. 轻量化双通道图像语义分割模型. 山西大同大学学报(自然科学版). 2022(05): 6-8 . 百度学术其他类型引用(7)
-


 下载:
下载:


计量
- 文章访问数: 3183
- HTML全文浏览量: 1059
- PDF下载量: 1223
- 被引次数: 14
