

-
摘要: 针对现代智能交通信息物理融合路网建设中的对象种类复杂、采集数据量大、传输及计算需求高以及实时调度控制能力弱等问题,基于云控制系统理论,以现代智能交通控制网络为研究对象,设计了智能交通信息物理融合云控制系统方案,包括智能交通边缘控制技术和智能交通网络虚拟化技术.基于智能交通流大数据,在云控制管理中心服务器上利用深度学习和超限学习机等智能学习方法对采集的交通流数据进行训练预测计算,能够预测城市道路的短时交通流和拥堵状况.进一步在云端利用智能优化调度算法得到实时的交通流调控策略,用于解决拥堵路段交通流分配难题,提高智能交通控制系统动态运行性能.仿真结果表明了本文方法的有效性.Abstract: Based on the theory of cloud control systems, an intelligent transportation cyber-physical cloud control system is designed due to the problems of complex objects, big data, high demand for transmission and calculation and poor real-time control ability in the modern intelligent transportation cyber-physical network. It includes intelligent transportation edge control technology and intelligent transportation network virtualization technology. Based on the big data of intelligent traffic flow, two intelligent learning methods, deep learning and extreme learning machine, are used to train and predict the traffic flow data on the servers of the cloud control management center. The short time traffic flow and the congestion of roads are predicted accurately. Then the real-time traffic flow control strategy is obtained by intelligent optimization scheduling algorithm in the cloud. The problem of traffic flow distribution in congested roads is solved and the dynamic performance of intelligent transportation control systems can be improved. The simulation results show the effectiveness of the proposed method.1) 本文责任编委 贺威
-
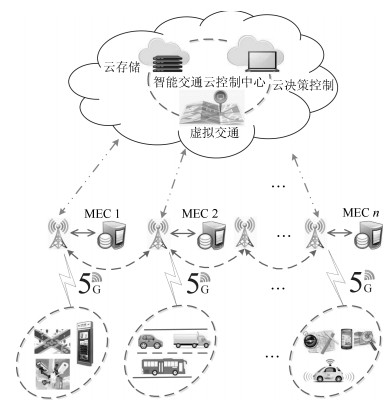
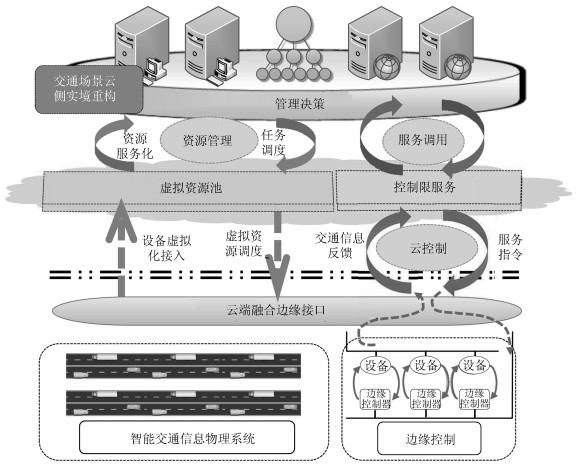
图 1 智能交通云控制系统示意图
Fig. 1 Schematic diagram of intelligent transportation cloud control systems

图 4 智能交通云控制网络虚拟化架构
Fig. 4 Intelligent transportation cloud control network virtualization architecture
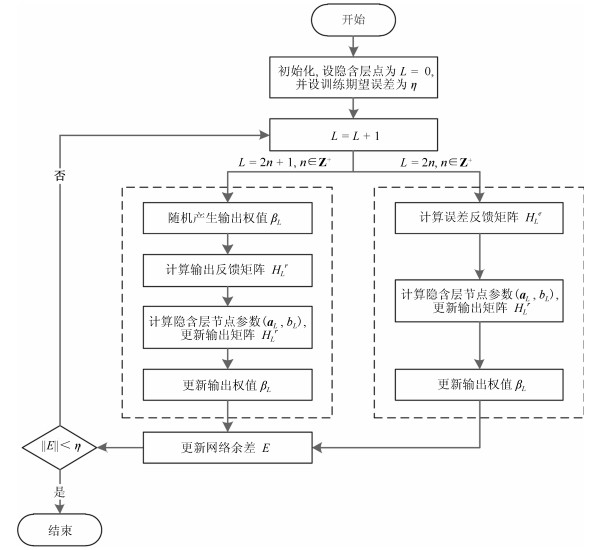
图 6 基于反向传播的双端超限学习机算法流程图
Fig. 6 Algorithm flow chart of back propagation bilateral extreme learning machine
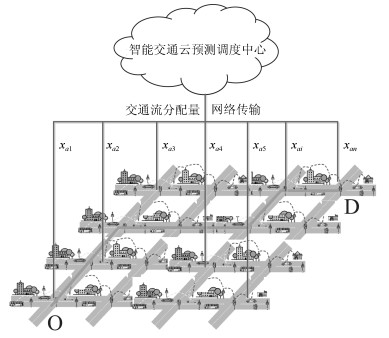
图 7 智能交通云控制系统预测调度示意图
Fig. 7 Schematic diagram of prediction scheduling for intelligent transportation cloud control systems
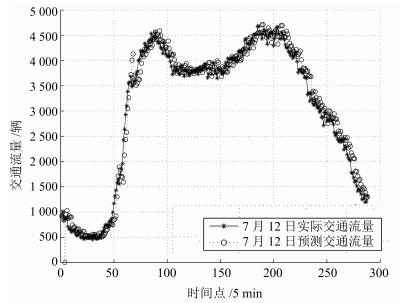
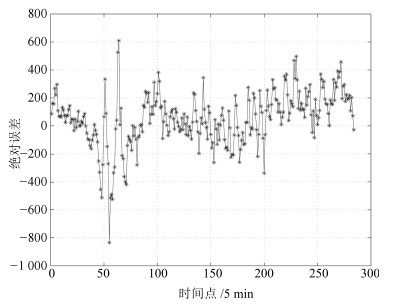
图 8 DBN-SVR预测交通流与实际交通流的对比
Fig. 8 Comparison of DBN-SVR prediction traffic flow and actual traffic flow
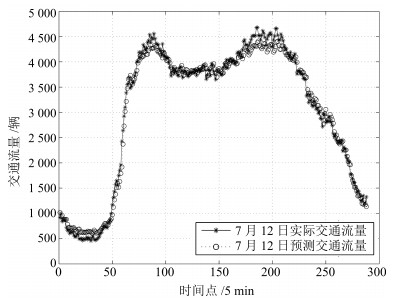
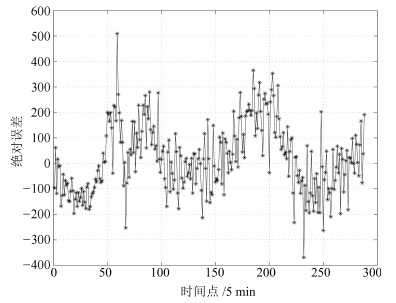
图 10 BP-BELM预测交通流与实际交通流的对比
Fig. 10 Comparison of BP-BELM prediction traffic flow and actual traffic flow
表 1 三种预测模型的性能比较
Table 1 Performance comparison of three prediction models
模型 MSE MAPE (%) DBN-SVR 0.05999 1.68051 BP-BELM 0.34084 10.7250 LSTM 0.37157 105.6117  下载: 导出CSV
下载: 导出CSV
-
[1] 王中杰, 谢璐璐.信息物理融合系统研究综述.自动化学报, 2011, 37(10):1157-1166 http://www.aas.net.cn/CN/abstract/abstract17604.shtmlWang Zhong-Jie, Xie Lu-Lu. Review on information physics fusion system. Acta Automatica Sinica, 2011, 37(10):1157-1166 http://www.aas.net.cn/CN/abstract/abstract17604.shtml [2] Xia Y. Cloud control systems. IEEE/CAA Journal of Automatica Sinica, 2015, 2(2):134-142 doi: 10.1109/JAS.2015.7081652 [3] 夏元清.云控制系统及其面临的挑战.自动化学报, 2016, 42(1):1-12 doi: 10.3969/j.issn.1003-8930.2016.01.001Xia Yuan-Qing. Cloud control systems and its challenges. Acta Automatica Sinica, 2016, 42(1):1-12 doi: 10.3969/j.issn.1003-8930.2016.01.001 [4] Xia Y. From networked control systems to cloud control systems. In:Proceedings of the 31st Chinese Control Conference (CCC). Hefei, China, 2012. 5878-5883 http://www.researchgate.net/publication/261129459_From_networked_control_systems_to_cloud_control_systems [5] 马庆禄, 斯海林, 郭建伟.物联网环境下城市交通区域联动的云控制策略.计算机应用研究, 2013, 30(9):2711-2714 doi: 10.3969/j.issn.1001-3695.2013.09.038Ma Qing-Lu, Si Hai-Lin, Guo Jian-Wei. Cloud control strategy for urban traffic area linkage under the environment of Internet of things. Application Research of Computers, 2013, 30(9):2711-2714 doi: 10.3969/j.issn.1001-3695.2013.09.038 [6] Wang F Y, Zheng N N, Cao D, Martinez C M, Li L, Liu T. Parallel driving in CPSS:a unified approach for transport automation and vehicle intelligence. IEEE/CAA Journal of Automatica Sinica, 2017, 4(4):577-587 doi: 10.1109/JAS.2017.7510598 [7] Chan K Y, Dillon T S, Singh J, Chang E. Neural-network-based models for short-term traffic flow forecasting using a hybrid exponential smoothing and Levenberg-Marquardt algorithm. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(2):644-654 doi: 10.1109/TITS.2011.2174051 [8] Meng D, Jia Y. Finite-time consensus for multi-agent systems via terminal feedback iterative learning. IET Control Theory & Applications, 2011, 5(8):2098-2110 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0d19fb99fae3b04d7e99faaa0550cdb1 [9] Nascimento J C, Silva J G, Marques J S, Lemos J M. Manifold learning for object tracking with multiple nonlinear models. IEEE Transactions on Image Processing, 2014, 23(4):1593-1604 doi: 10.1109/TIP.2014.2303652 [10] Xue J, Shi Z. Short-time traffic flow prediction based on chaos time series theory. Journal of Transportation Systems Engineering and Information Technology, 2014, 8(5):68-72 http://www.sciencedirect.com/science/article/pii/S1570667208600409 [11] Polson N G, Sokolov V O, Deep learning for short-term traffic flow prediction. Transportation Research Part C Emerging Technologies, 2017, 79, 1-17 doi: 10.1016/j.trc.2017.02.024 [12] Kumar S V, Traffic flow prediction using Kalman filtering technique. Procedia Engineering, 2017, 187, 582-587 doi: 10.1016/j.proeng.2017.04.417 [13] 罗向龙, 焦琴琴, 牛力瑶, 孙壮文.基于深度学习的短时交通流预测.计算机应用研究, 2017, 34(1):91-93 doi: 10.3969/j.issn.1001-3695.2017.01.018Luo Xiang-Long, Jiao Qin-Qin, Niu Li-Yao, Sun Zhuang-Wen. Short term traffic flow prediction based on deep learning. Application Research of Computers, 2017, 34(1):91-93 doi: 10.3969/j.issn.1001-3695.2017.01.018 [14] Xu Y, Kong Q, Klette R, Liu Y, Accurate and interpretable bayesian MARS for traffic flow prediction. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(6):2457-2469 doi: 10.1109/TITS.2014.2315794 [15] Oh S, Kim Y, Hong J, Urban traffic flow prediction system using a multifactor pattern recognition model. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5):2744-2755 doi: 10.1109/TITS.2015.2419614 [16] Moretti F, Pizzuti S, Panzieri S, Annunziato M, Urban traffic flow forecasting through statistical and neural network bagging ensemble hybrid modeling. Neurocomputing, 2015, 167(C):3-7 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0235390321/ [17] Jeong Y S, Byon Y J, Castro-Neto M M, Easa S M, Supervised weighting-online learning algorithm for short-term traffic flow prediction. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(4):1700-1707 doi: 10.1109/TITS.2013.2267735 [18] Chan K Y, Dillion T S. On-road sensor configuration design for traffic flow prediction using fuzzy neural networks and taguchi method. IEEE Transactions on Instrumentation and Measurement, 2013, 62(1):50-59 doi: 10.1109/TIM.2012.2212506 [19] 满瑞君, 梁雪春.基于多尺度小波支持向量机的交通流预测.计算机仿真, 2013, 30(11):156-159 doi: 10.3969/j.issn.1006-9348.2013.11.035Man Rui-Jun, Liang Xue-Chun. Traffic flow forecasting based on multi-scale wavelet support vector machine. Computer Simulation, 2013, 30(11):156-159 doi: 10.3969/j.issn.1006-9348.2013.11.035 [20] Huang W H, Song G J, Hong H K, Xie K. Deep architecture for traffic flow prediction:deep belief networks with multitask learning. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(5):2191-2201 doi: 10.1109/TITS.2014.2311123 [21] Koesdwiady A, Soua R, Karray F. Improving traffic flow prediction with weather information in connected cars:a deep learning approach. IEEE Transactions on Vehicular Technology, 2016, 65(12):9508-9517 doi: 10.1109/TVT.2016.2585575 [22] Hinton G, Osindero S, Teh Y. A fast learning algorithm for deep belief nets. Neurocomputing, 2006, 18(7):1527-1554 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b66e97177e8ce3590f5b9369eb533e53 [23] Kuremoto T, Kimura S, Kobayashi K, Obayashi M. Time series forecasting using a deep belief network with restricted Boltzmann machines. Neurocomputing, 2014, 137(15):47-56 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=716bafba78199bab1f5dc7ff8e6838db [24] 谭娟, 王胜春.基于深度学习的交通拥堵预测模型研究.计算机应用研究, 2015, 32(10):2951-2954 doi: 10.3969/j.issn.1001-3695.2015.10.016Tan Juan, Wang Sheng-Chun. Traffic congestion prediction model based on deep learning. Application Research of Computers, 2015, 32(10):2951-2954 doi: 10.3969/j.issn.1001-3695.2015.10.016 [25] Lv Y, Duan Y, Wang W, Li Z, Wang F, Traffic flow prediction with big data:a deep learning approach. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2):865-873 http://www.researchgate.net/publication/273564489_traffic_flow_prediction_with_big_data_a_deep_learning_approach [26] Huang G B, Chen L, Siew C K. Universal approximation using incremental constructive feedforward networks with random hidden nodes. IEEE Transactions on Neural Networks, 2006, 17(4):879-892 doi: 10.1109/TNN.2006.875977 [27] Huang G B, Zhou H, Ding X, Zhang R. Extreme learning machine for regression and multiclass classification. IEEE Transactions on Systems Man and Cybernetics, 2012, 42(2):513-529 doi: 10.1109/TSMCB.2011.2168604 [28] Huang W H, Song G J, Hong H K, Xie K. Deep architecture for traffic flow prediction:deep belief networks with multitask learning. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(5):2191-2201 doi: 10.1109/TITS.2014.2311123 [29] Xia Y, Qin Y, Zhai D H, Chai S. Further results on cloud control systems. Science China Information Sciences, 2016, 59(7):073201 doi: 10.1007/s11432-016-5586-9 [30] 夏元清, Mahmoud M S, 李慧芳, 张金会.控制与计算理论的交互:云控制.指挥与控制学报, 2017, 3(2):99-118 doi: 10.3969/j.issn.2096-0204.2017.02.0099Xia Yuan-Qing, Mahmoud M S, Li Hui-Fang, Zhang Jin-Hui. Interaction between control and computation theory:cloud control. Journal of Command and Control, 2017, 3(2):99-118 doi: 10.3969/j.issn.2096-0204.2017.02.0099 [31] Kang D, Lv Y, Chen Y. Short-term traffic flow prediction with LSTM recurrent neural network. In:Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems. Yokohama, Japan:IEEE, 2017. 1-6 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_af8df0c3cad045255a265484eebd5503 -

 下载:
下载:

计量
- 文章访问数: 4417
- HTML全文浏览量: 1163
- PDF下载量: 1583
- 被引次数: 0
