

-
摘要: 基于可穿戴式惯性传感器(Inertial sensor unit,IMU)的人体运动跟踪技术具有佩戴方便、运动空间不受限和成本低等优点,已广泛应用于医疗康复、体育竞技、人机交互和虚拟现实等领域.本文对惯性式人体运动跟踪技术的发展历史、研究现状以及典型方法进行了较为全面的梳理和总结,主要包括人体运动学模型和生物学约束,传感器初始对准方法,传感器种类,传感器误差处理以及数据融合方法,并概述相关方法应用于实际的现状.最后,总结了该领域待解决的难点问题,并对未来的发展趋势进行了展望.Abstract: Human motion tracking based on wearable inertial sensors has the advantages of convenient wearing, unrestricted motion space and low cost. It has found wide applications in medical treatment, sports, human-machine interaction, virtual reality and other fields. A detail overview of the history, the state of the art, and typical methods are given in this paper. Special attention is paid to the following areas:human kinematics models and biological constraints, sensor-to-segment calibration, sensor technology, sensor interference handling, information fusion methods, and the relevant applications. Finally, the outstanding issues are summarized, and the future trends of this field are discussed.
-
Key words:
- Human motion tracking /
- wearable inertial sensors /
- kinematics /
- information fusion
1) 本文责任编委 郭戈 -
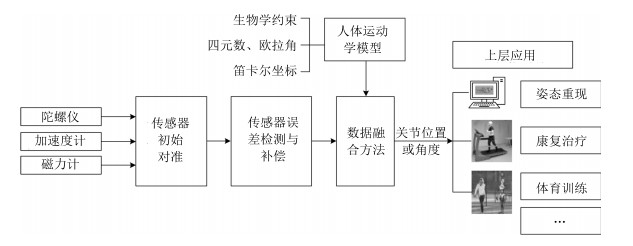
图 1 基于惯性传感器的人体运动跟踪系统示意图
Fig. 1 Diagram of human motion tracking system based on inertial sensors
-
[1] Luinge H J, Veltink P H, Baten C T. Estimating orientation with gyroscopes and accelerometers. Technology and Health Care:Official Journal of the European Society for Engineering and Medicine, 1999, 7(6):455-459 [2] Bachmann E R. Inertial and Magnetic Tracking of Limb Segment Orientation for Inserting Humans into Synthetic Environments[Ph. D. dissertation], Naval Postgraduate School, USA, 2000. [3] Bachmann E R, McGhee R B, Yun X P, Zyda M J. Inertial and magnetic posture tracking for inserting humans into networked virtual environments. In: Proceedings of the 2001 ACM Symposium on Virtual Reality Software and Technology. Baniff, Canada: ACM, 2001.9-16 [4] Yun X P, Lizarraga M, Bachmann E R, McGhee R B. An improved quaternion-based Kalman filter for real-time tracking of rigid body orientation. In: Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003). Las Vegas, USA: IEEE, 2003.1074-1079 [5] El-Gohary M, McNames J. Shoulder and elbow joint angle tracking with inertial sensors. IEEE Transactions on Biomedical Engineering, 2012, 59(9):2635-2641 doi: 10.1109/TBME.2012.2208750 [6] Zhang Z Q, Wong W C, Wu J K. Ubiquitous human upperlimb motion estimation using wearable sensors. IEEE Transactions on Information Technology in Biomedicine, 2011, 15(4):513-521 doi: 10.1109/TITB.2011.2159122 [7] Zhang Z Q, Wu J K. A novel hierarchical information fusion method for three-dimensional upper limb motion estimation. IEEE Transactions on Instrumentation and Measurement, 2011, 60(11):3709-3719 doi: 10.1109/TIM.2011.2135070 [8] Tao G H, Sun S Y, Huang S, Huang Z P, Wu J K. Human modeling and real-time motion reconstruction for micro-sensor motion capture. In: Proceedings of the 2011 IEEE International Conference on Virtual Environments, Human-Computer Interfaces and Measurement Systems. Ottawa, Canada: IEEE, 2011.1-5 [9] 吴健康.人体运动捕获三维再现系统, CN 201431466 Y, 2010.Wu Jian-Kang. Human Motion Capture 3D Reconstruction System. CN Patent 201431466 Y, 2010. [10] Li G, Wu Z, Meng X L, Wu J K. Modeling of human body for animation by micro-sensor motion capture. In: Proceedings of the 2nd International Symposium on Knowledge Acquisition and Modeling. Wuhan, China: IEEE, 2009.98-101 [11] 李启雷, 金文光, 耿卫东.基于无线惯性传感器的人体动作捕获方法.浙江大学学报(工学版), 2012, 46(2):280-285 doi: 10.3785/j.issn.1008-973X.2012.02.016Li Qi-Lei, Jin Wen-Guang, Geng Wei-Dong. Human motion capture using wireless inertial sensors. Journal of Zhejiang University (Engineering Science), 2012, 46(2):280-285 doi: 10.3785/j.issn.1008-973X.2012.02.016 [12] 容志能.惯性运动捕捉系统中传感数据的传输与处理[硕士学位论文], 浙江大学, 中国, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10335-1012312400.htmRong Zhi-Neng. Sensor Data Transmission and Processing of Inertia Motion Capture System[Master thesis], Zhejiang University, China, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10335-1012312400.htm [13] 张赛赛.面向人体运动捕获的姿态测量算法研究与实现[硕士学位论文], 浙江大学, 中国, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10335-1017242154.htmZhang Sai-Sai. Research and Implementation of Attitude Measurement Algorithm for Human Motion Capture[Master thesis], Zhejiang University, China, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10335-1017242154.htm [14] 王科俊, 陈玮.一种可穿戴式人体运动捕捉系统的设计与实现.黑龙江大学工程学报, 2013, 4(2):97-102 http://d.old.wanfangdata.com.cn/Periodical/hljsz201302015Wang Ke-Jun, Chen Wei. Design and implementation of a wearable human motion capture system. Journal of Engineering of Heilongjiang University, 2013, 4(2):97-102 http://d.old.wanfangdata.com.cn/Periodical/hljsz201302015 [15] 陈玮.惯性式人体运动传感器的关键技术研究[硕士学位论文], 哈尔滨工程大学, 中国, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10217-1014133314.htmChen Wei. Study on the Key Technologies for Inertial Human Motion Sensor[Master thesis], Harbin Engineering University, China, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10217-1014133314.htm [16] 刘星.多维MEMS惯性传感器的姿态解算算法研究[硕士学位论文], 哈尔滨工程大学, 中国, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10217-1014133393.htmLiu Xing. The Attitude Test Algorithm Based on MEMS Multidimensional Inertial Sensors[Master thesis], Harbin Engineering University, China, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10217-1014133393.htm [17] Qiu S, Wang Z L, Zhao H Y, Hu H S. Using distributed wearable sensors to measure and evaluate human lower limb motions. IEEE Transactions on Instrumentation and Measurement, 2016, 65(4):939-950 doi: 10.1109/TIM.2015.2504078 [18] 仇森.人体步态分析的多传感器数据融合研究[博士学位论文], 大连理工大学, 中国, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10141-1016204559.htmQiu Sen. Multi-sensor Data Fusion for Human Gait Analysis[Ph. D. dissertation], Dalian University of Technology, China, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10141-1016204559.htm [19] 武东辉.基于惯性传感器数据的人体日常动作识别研究[博士学位论文], 大连理工大学, 中国, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10141-1017022913.htmWu Dong-Hui. Research on Inertial Sensor Data Based Human Daily Activity Recognition[Ph. D. dissertation], Dalian University of Technology, China, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10141-1017022913.htm [20] Buke A, Fang G L, Wang Y C, Song L, Yang Z Q. Healthcare algorithms by wearable inertial sensors:a survey. China Communications, 2015, 12(4):1-12 [21] Harle R. A survey of indoor inertial positioning systems for pedestrians. IEEE Communications Surveys and Tutorials, 2013, 15(3):1281-1293 doi: 10.1109/SURV.2012.121912.00075 [22] Yang Z, Wu C S, Zhou Z M, Zhang X L, Wang X, Liu Y H. Mobility increases localizability:a survey on wireless indoor localization using inertial sensors. ACM Computing Surveys, 2015, 47(3):Article No. 54 [23] Yang S Z, Li Q G. Inertial sensor-based methods in walking speed estimation:a systematic review. Sensors, 2012, 12(5):6102-6116 doi: 10.3390/s120506102 [24] Camomilla V, Bergamini E, Fantozzi S, Vannozzi G. Trends supporting the in-field use of wearable inertial sensors for sport performance evaluation:a systematic review. Sensors, 2018, 18(3):Article No. 873 doi: 10.3390/s18030873 [25] Filippeschi A, Schmitz N, Miezal M, Bleser G, Ruffaldi E, Stricker D. Survey of motion tracking methods based on inertial sensors:a focus on upper limb human motion. Sensors, 2017, 17(6):Article No. 1257 doi: 10.3390/s17061257 [26] Wong C, Zhang Z Q, Lo B, Yang G Z. Wearable sensing for solid biomechanics:a review. IEEE Sensors Journal, 2015, 15(5):2747-2760 [27] López-Nava I H, Muñoz-Meléndez A. Wearable inertial sensors for human motion analysis:a review. IEEE Sensors Journal, 2016, 16(22):7821-7834 doi: 10.1109/JSEN.2016.2609392 [28] Kuipers J B. Quaternions and Rotation Sequences. Princeton:Princeton University Press, 1999. [29] Wenk F, Frese U. Posture from motion. In: Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Hamburg, Germany: IEEE, 2015.280-285 [30] Usta U Y. Comparison of Quaternion and Euler Angle Methods for Joint Angle Animation of Human Figure Models[Master thesis], Naval Postgraduate School, USA, 1999. [31] Shuster M D. A survey of attitude representations. The Journal of the Astronautical Sciences, 1993, 41(4):439-517 [32] Lee G X, Low K S. A factorized quaternion approach to determine the arm motions using triaxial accelerometers with anatomical and sensor constraints. IEEE Transactions on Instrumentation and Measurement, 2012, 61(6):1793-1802 doi: 10.1109/TIM.2011.2181884 [33] Yun X P, Bachmann E R, McGhee R B. A simplified quaternion-based algorithm for orientation estimation from earth gravity and magnetic field measurements. IEEE Transactions on Instrumentation and Measurement, 2008, 57(3):638-650 doi: 10.1109/TIM.2007.911646 [34] 黄雪樵.克服欧拉方程奇异性的双欧法.飞行力学, 1994, 12(4):28-37 http://d.old.wanfangdata.com.cn/Periodical/htfhyyg200303002Huang Xue-Qiao. The dual Euler method for overcoming the singularity of Euler equation. Flight Dynamics, 1994, 12(4):28-37 http://d.old.wanfangdata.com.cn/Periodical/htfhyyg200303002 [35] 张生志.多传感融合的室内行人定位技术研究[博士学位论文], 华中科技大学, 中国, 2016. http://d.wanfangdata.com.cn/Thesis/D01078525Zhang Sheng-Zhi. Research on the Techniques of Indoor Pedestrian Location Using Multi-sensing Fusion[Ph. D. dissertation], Huazhong University of Science and Technology, China, 2016. http://d.wanfangdata.com.cn/Thesis/D01078525 [36] Teu K K, Kim W, Tan J, Fuss F K. Using dual Euler angles for the analysis of arm movement during the badminton smash. Sports Engineering, 2005, 8(3):171-178 doi: 10.1007/BF02844017 [37] Cereatti A, Croce U D, Sabatini A M. Three-dimensional human kinematic estimation using magneto-inertial measurement units. Handbook of Human Motion. Cham: Springer, 2017.221-244 [38] 左国玉, 于双悦, 龚道熊.遥操作护理机器人系统的操作者姿态解算方法研究.自动化学报, 2016, 42(12):1839-1848 http://www.aas.net.cn/CN/abstract/abstract18972.shtmlZuo Guo-Yu, Yu Shuang-Yue, Gong Dao-Xiong. Operator attitude algorithm for telerobotic nursing system. Acta Automatica Sinica, 2016, 42(12):1839-1848 http://www.aas.net.cn/CN/abstract/abstract18972.shtml [39] Rong Z, Zhou Z Y. A real-time articulated human motion tracking using tri-axis inertial/magnetic sensors package. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2004, 12(2):295-302 doi: 10.1109/TNSRE.2004.827825 [40] Dumas R, Wojtusch J. Estimation of the body segment inertial parameters for the rigid body biomechanical models used in motion analysis. Handbook of Human Motion. Cham: Springer, 2017.1-31 [41] Baerlocher P. Inverse Kinematics of the Interactive Posture Control of Articulated Figures.[Ph. D. dissertation], École Polytechnique Fédérale de Lausanne, Switzerland, 2001. [42] Mihelj M. Human arm kinematics for robot based rehabilitation. Robotica, 2006, 24(3):377-383 doi: 10.1017/S0263574705002304 [43] Lambrecht J M, Kirsch R F. Miniature low-power inertial sensors:promising technology for implantable motion capture systems. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2014, 22(6):1138-1147 doi: 10.1109/TNSRE.2014.2324825 [44] Álvarez D, Álvarez J C, González R C, López A M. Upper limb joint angle measurement in occupational health. Computer Methods in Biomechanics and Biomedical Engineering, 2016, 19(2):159-170 doi: 10.1080/10255842.2014.997718 [45] Peppoloni L, Filippeschi A, Ruffaldi E, Avizzano C A. A novel 7 degrees of freedom model for upper limb kinematic reconstruction based on wearable sensors. In: Proceedings of the 11th International Symposium on Intelligent Systems and Informatics (SISY). Subotica, Serbia: IEEE, 2013.105-110 [46] Ruffaldi E, Peppoloni L, Filippeschi A, Avizzano C A. A novel approach to motion tracking with wearable sensors based on probabilistic graphical models. In: Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China: IEEE, 2014.1247-1252 [47] Zhou H Y, Hu H S, Tao Y Q. Inertial measurements of upper limb motion. Medical and Biological Engineering and Computing, 2006, 44(6):479-487 doi: 10.1007/s11517-006-0063-z [48] Jung Y, Kang D, Kim J. Upper body motion tracking with inertial sensors. In: Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics. Tianjin, China: IEEE, 2011.1746-1751 [49] 陈文斌.人体上肢运动学分析与类人肢体设计及运动规划[博士学位论文], 华中科技大学, 中国, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10487-1012361531.htmChen Wen-Bin. Human Upper Limb Kinematics and Anthropomorphic Robot Kinematic Design and Motion Planning[Ph. D. dissertation], Huazhong University of Science and Technology, China, 2012. http://cdmd.cnki.com.cn/Article/CDMD-10487-1012361531.htm [50] Meng X L, Zhang Z Q, Wu J K, Wong W C. Hierarchical information fusion for global displacement estimation in microsensor motion capture. IEEE Transactions on Biomedical Engineering, 2013, 60(7):2052-2063 doi: 10.1109/TBME.2013.2248085 [51] Joukov V, Karg M, Kulic D. Online tracking of the lower body joint angles using IMUs for gait rehabilitation. In: Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Chicago, USA: IEEE, 2014.2310-2313 [52] Yuan Q L, Chen I M. 3-D localization of human based on an inertial capture system. IEEE Transactions on Robotics, 2013, 29(3):806-812 doi: 10.1109/TRO.2013.2248535 [53] Zhang Z Q, Meng X L. Use of an inertial/magnetic sensor module for pedestrian tracking during normal walking. IEEE Transactions on Instrumentation and Measurement, 2015, 64(3):776-783 doi: 10.1109/TIM.2014.2349211 [54] Zihajehzadeh S, Park E J. A novel biomechanical modelaided IMU/UWB fusion for magnetometer-free lower body motion capture. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2017, 47(6):927-938 doi: 10.1109/TSMC.2016.2521823 [55] Cutti A G, Ferrari A, Garofalo P, Raggi M, Cappello A, Ferrari A. "Outwalk":a protocol for clinical gait analysis based on inertial and magnetic sensors. Medical and Biological Engineering and Computing, 2010, 48(1):17-25 doi: 10.1007/s11517-009-0545-x [56] Miezal M, Miezal G, Schmitz N, Stricker D. A generic approach to inertial tracking of arbitrary kinematic chains. In: Proceedings of the 8th International Conference on Body Area Networks. Boston, Massachusetts, USA: ACM, 2013.189-192 [57] Young A D. Use of body model constraints to improve accuracy of inertial motion capture. In: Proceedings of the 2010 International Conference on Body Sensor Networks. Singapore, Singapore: IEEE, 2010.180-186 [58] 刘博.基于MEMS传感器的动作捕捉系统开发设计[硕士学位论文], 北京理工大学, 中国, 2011. http://cdmd.cnki.com.cn/article/cdmd-10007-1012007188.htmLiu Bo. The Development and Design of Motion Capture System Based on Sensors[Master thesis], Beijing Institute of Technology, China, 2011. http://cdmd.cnki.com.cn/article/cdmd-10007-1012007188.htm [59] Kok M, Hol J D, Schön T B. An optimization-based approach to human body motion capture using inertial sensors. IFAC Proceedings Volumes, 2014, 47(3):79-85 doi: 10.3182/20140824-6-ZA-1003.02252 [60] Miezal M, Taetz B, Bleser G. On inertial body tracking in the presence of model calibration errors. Sensors, 2016, 16(7):Article No. 1132 doi: 10.3390/s16071132 [61] Ericson A, Arndt A, Stark A, Wretenberg P, Lundberg A. Variation in the position and orientation of the elbow flexion axis. Journal of Bone and Joint Surgery. British Volume, 2003, 85(4): 538-544 [62] Cutti A G, Giovanardi A, Rocchi L, Davalli A, Sacchetti R. Ambulatory measurement of shoulder and elbow kinematics through inertial and magnetic sensors. Medical and Biological Engineering and Computing, 2008, 46(2):169-178 doi: 10.1007/s11517-007-0296-5 [63] Zhang Z Q, Ji L Y, Huang Z P, Wu J K. Adaptive information fusion for human upper limb movement estimation. IEEE Transactions on Systems, Man, and CyberneticsPart A:Systems and Humans, 2012, 42(5):1100-1108 doi: 10.1109/TSMCA.2012.2189876 [64] Luinge H J, Veltink P H, Baten C T M. Ambulatory measurement of arm orientation. Journal of Biomechanics, 2007, 40(1):78-85 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=50fb3f07f3ff3dbe4a6412d434021a0a [65] Cooper G, Sheret L, McMillian L, Siliverdis K, Sha N, Hodgins D, et al. Inertial sensor-based knee flexion/extension angle estimation. Journal of Biomechanics, 2009, 42(16):2678-2685 doi: 10.1016/j.jbiomech.2009.08.004 [66] Meng X L, Zhang Z Q, Sun S Y, Wu J K, Wong W C. Biomechanical model-based displacement estimation in micro-sensor motion capture. Measurement Science and Technology, 2012, 23(7):Article No. 055101 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ff2d9de8d10873c224c05fe2b681e2c7 [67] Simon D. Kalman filtering with state constraints:a survey of linear and nonlinear algorithms. IET Control Theory and Applications, 2010, 4(8):1303-1318 doi: 10.1049/iet-cta.2009.0032 [68] Atrsaei A, Salarieh H, Alasty A, Abediny M. Human arm motion tracking by inertial/magnetic sensors using unscented Kalman filter and relative motion constraint. Journal of Intelligent and Robotic Systems, 2018, 90(1-2):161 -170 doi: 10.1007/s10846-017-0645-z [69] Picerno P, Cereatti A, Cappozzo A. Joint kinematics estimate using wearable inertial and magnetic sensing modules. Gait and Posture, 2008, 28(4):588-595 doi: 10.1016/j.gaitpost.2008.04.003 [70] Roetenberg D, Luinge H, Slycke P. Xsens MVN:full 6 DOF human motion tracking using miniature inertial sensors. Xsens Motion Technologies BV, 2009. [71] El-Gohary M, Pearson S, McNames J. Joint angle tracking with inertial sensors. In: Proceedings of the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Vancouver, Canada: IEEE, 2008.1068-1071 [72] Yang H, Ye J T. A calibration process for tracking upper limb motion with inertial sensors. In: Proceedings of the 2011 International Conference on Mechatronics and Automation. Beijing, China: IEEE, 2011.618-623 [73] Favre J, Jolles B M, Aissaoui R, Aminian K. Ambulatory measurement of 3D knee joint angle. Journal of Biomechanics, 2008, 41(5):1209-1035 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0dcbe97ba125e618ee842dfcc5729307 [74] Favre J, Aissaoui R, Jolles B M, de Guise J A, Aminian K. Functional calibration procedure for 3D knee joint angle description using inertial sensors. Journal of Biomechanics, 2009, 42(14):2330-2335 doi: 10.1016/j.jbiomech.2009.06.025 [75] Wang Y, Xu J, Wu X X, Pottie G, Kaiser W. A simple calibration for upper limb motion tracking and reconstruction. In: Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Chicago, USA: IEEE, 2014.5868-5871 [76] O'Donovan K J, Kamnik R, O'Keeffe D T, Lyons G M. An inertial and magnetic sensor based technique for joint angle measurement. Journal of Biomechanics, 2007, 40(12):2604-2611 doi: 10.1016/j.jbiomech.2006.12.010 [77] Taetz B, Bleser G, Miezal M. Towards self-calibrating inertial body motion capture. In: Proceedings of the 19th International Conference on Information Fusion (FUSION). Heidelberg, Germany: IEEE, 2016.1751-1759 [78] Müller P, Bégin M A, Schauer T, Seel T. Alignment-free, self-calibrating elbow angles measurement using inertial sensors. In: Proceedings of the 2016 IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI). Las Vegas, USA: IEEE, 2016.583-586 [79] van Lith M, Fong J, Crocher V, Tan Y, Mareels I, Oetomo D. Calibration free upper limb joint motion estimation algorithm with wearable sensors. In: Proceedings of the 14th International Conference on Control, Automation, Robotics, and Vision (ICARCV). Phuket, Thailand: IEEE, 2016.1-6 [80] Du G L, Zhang P, Li D. Human-manipulator interface based on multisensory process via Kalman filters. IEEE Transactions on Industrial Electronics, 2014, 61(10):5411 -5418 doi: 10.1109/TIE.2014.2301728 [81] Tao Y Q, Hu H S, Zhou H Y. Integration of vision and inertial sensors for 3D arm motion tracking in home-based rehabilitation. The International Journal of Robotics Research, 2007, 26(6):607-624 doi: 10.1177/0278364907079278 [82] Tao Y Q, Hu H S. A novel sensing and data fusion system for 3-D arm motion tracking in telerehabilitation. IEEE Transactions on Instrumentation and Measurement, 2008, 57(5):1029-1040 doi: 10.1109/TIM.2007.913828 [83] Nguyen K D, Chen I M, Luo Z Q, Yeo S H, Duh H B L. A wearable sensing system for tracking and monitoring of functional arm movement. IEEE/ASME Transactions on Mechatronics, 2011, 16(2):213-220 doi: 10.1109/TMECH.2009.2039222 [84] Weenk D, Roetenberg D, van Beijnum B J F, Hermens H J, Veltink P H. Ambulatory estimation of relative foot positions by fusing ultrasound and inertial sensor data. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2015, 23(5):817-826 doi: 10.1109/TNSRE.2014.2357686 [85] Luinge H J, Veltink P H. Measuring orientation of human body segments using miniature gyroscopes and accelerometers. Medical and Biological Engineering and Computing, 2005, 43(2):273-282 doi: 10.1007/BF02345966 [86] El-Gohary M, McNames J. Human joint angle estimation with inertial sensors and validation with a robot arm. IEEE Transactions on Biomedical Engineering, 2015, 62(7):1759-1767 doi: 10.1109/TBME.2015.2403368 [87] Godwin A, Agnew M, Stevenson J. Accuracy of inertial motion sensors in static, quasistatic, and complex dynamic motion. Journal of Biomechanical Engineering, 2009, 131(11):Article No. 114501 doi: 10.1115/1.4000109 [88] Ligorio G, Sabatini A M. A novel Kalman filter for human motion tracking with an inertial-based dynamic inclinometer. IEEE Transactions on Biomedical Engineering, 2015, 62(8):2033-2043 doi: 10.1109/TBME.2015.2411431 [89] Karunarathne M S, Ekanayake S W, Pathirana P N. An adaptive complementary filter for inertial sensor based data fusion to track upper body motion. In: Proceedings of the 7th International Conference on Information and Automation for Sustainability. Colombo, Sri Lanka: IEEE, 2014.1-5 [90] Roetenberg D, Luinge H J, Baten C T M, Veltink P H. Compensation of magnetic disturbances improves inertial and magnetic sensing of human body segment orientation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2005, 13(3):395-405 doi: 10.1109/TNSRE.2005.847353 [91] Schepers H M, Roetenberg D, Veltink P H. Ambulatory human motion tracking by fusion of inertial and magnetic sensing with adaptive actuation. Medical and Biological Engineering and Computing, 2010, 48(1):27-37 doi: 10.1007/s11517-009-0562-9 [92] Yun X P, Aparicio C, Bachmann E R, McGhee R B. Implementation and experimental results of a quaternion-based Kalman filter for human body motion tracking. In: Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain: IEEE, 2005.1216-1227 [93] Yun X P, Bachmann E R. Design, implementation, and experimental results of a quaternion-based Kalman filter for human body motion tracking. IEEE Transactions on Robotics, 2006, 22(6):1216-1227 doi: 10.1109/TRO.2006.886270 [94] Zhou H Y, Hu H S. Inertial motion tracking of human arm movements in stroke rehabilitation. In: Proceedings of the 2005 IEEE International Conference on Mechatronics and Automation. Niagara Falls, Canada: IEEE, 2005.1306-1311 [95] Zhou H Y, Stone T, Hu H S, Harris N. Use of multiple wearable inertial sensors in upper limb motion tracking. Medical Engineering and Physics, 2008, 30(1):123-133 doi: 10.1016/j.medengphy.2006.11.010 [96] Zhang Z Q, Wong W C, Wu J K. Wearable sensors for 3D upper limb motion modeling and ubiquitous estimation. Journal of Control Theory and Applications, 2011, 9(1):10-17 doi: 10.1007/s11768-011-0234-9 [97] Sabatini A M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Transactions on Biomedical Engineering, 2006, 53(7):1346-1356 doi: 10.1109/TBME.2006.875664 [98] Sabatini A M. Estimating three-dimensional orientation of human body parts by inertial/magnetic sensing. Sensors, 2011, 11(2):1489-1525 doi: 10.3390/s110201489 [99] Sabatini A M. Variable-state-dimension Kalman-based filter for orientation determination using inertial and magnetic sensors. Sensors, 2012, 12(7):8491-8506 doi: 10.3390/s120708491 [100] Fourati H, Manamanni N, Afilal L, Handrich Y. Complementary observer for body segments motion capturing by inertial and magnetic sensors. IEEE/ASME Transactions on Mechatronics, 2014, 19(1):149-157 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=f684318f66210278cbd777c3bf2706e2 [101] Fourati H, Manamanni N, Afilal L, Handrich Y. A nonlinear filtering approach for the attitude and dynamic body acceleration estimation based on inertial and magnetic sensors:bio-logging application. IEEE Sensors Journal, 2011, 11(1):233-244 doi: 10.1109/JSEN.2010.2053353 [102] Lee G X, Low K S, Taher T. Unrestrained measurement of arm motion based on a wearable wireless sensor network. IEEE Transactions on Instrumentation and Measurement, 2010, 59(5):1309-1317 doi: 10.1109/TIM.2010.2043974 [103] Zhou H Y, Hu H S. Reducing drifts in the inertial measurements of wrist and elbow positions. IEEE Transactions on Instrumentation and Measurement, 2010, 59(3):575-585 doi: 10.1109/TIM.2009.2025065 [104] Sun S Y, Meng X L, Ji L Y, Huang Z P, Wu J K. Adaptive Kalman filter for orientation estimation in micro-sensor motion capture. In: Proceedings of the 14th International Conference on Information Fusion. Chicago, USA: IEEE, 2011.1-8 [105] Kang C W, Kim H J, Park C G. A human motion tracking algorithm using adaptive EKF based on Markov chain. IEEE Sensors Journal, 2016, 16(24):8953-8962 doi: 10.1109/JSEN.2016.2607223 [106] Zhang Z Q. Two-step calibration methods for miniature inertial and magnetic sensor units. IEEE Transactions on Industrial Electronics, 2015, 62(6):3714-3723 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cf2853268b3b5ec0f423fb22ac165a4d [107] Zhang S, Xiao K, Zhang Q, Zhang H, Liu Y. Improved extended Kalman fusion method for upper limb motion estimation with inertial sensors. In: Proceedings of the 4th International Conference on Intelligent Control and Information Processing (ICICIP). Beijing, China: IEEE, 2013.587-593 [108] Harada T, Mori T, Sato T. Development of a tiny orientation estimation device to operate under motion and magnetic disturbance. The International Journal of Robotics Research, 2007, 26(6):547-559 doi: 10.1177/0278364907079272 [109] Lee J K, Park E J. Minimum-order Kalman filter with vector selector for accurate estimation of human body orientation. IEEE Transactions on Robotics, 2009, 25(5):1196-1201 doi: 10.1109/TRO.2009.2017146 [110] Ligorio G, Sabatini A M. Dealing with magnetic disturbances in human motion capture:a survey of techniques. Micromachines, 2016, 7(3):Article No. 43 doi: 10.3390/mi7030043 [111] Gallagher A, Matsuoka Y, Ang W T. An efficient realtime human posture tracking algorithm using low-cost inertial and magnetic sensors. In: Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Sendai, Japan: IEEE, 2004.2967-2972 [112] Tian Y, Wei H X, Tan J D. An adaptive-gain complementary filter for real-time human motion tracking with MARG sensors in free-living environments. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2013, 21(2):254-264 doi: 10.1109/TNSRE.2012.2205706 [113] Hsu Y L, Wang J S, Lin Y C, Chen S M, Tsai Y J, Chu C L, et al. A wearable inertial-sensing-based body sensor network for shoulder range of motion assessment. In: Proceedings of the 1st International Conference on Orange Technologies (ICOT). Tainan, China: IEEE, 2013.328-331 [114] Kanjanapas K, Wang Y Z, Zhang W L, Whittingham L, Tomizuka M. A human motion capture system based on inertial sensing and a complementary filter. In: Proceedings of the ASME 2013 Dynamic Systems and Control Conference. Palo Alto, USA: ASME, 2001.15-22 [115] Xu C, He J, Zhang X T, Yao C, Tseng P H. Geometrical kinematic modeling on human motion using method of multi-sensor fusion. Information Fusion, 2018, 41:243-254 doi: 10.1016/j.inffus.2017.09.014 [116] Taunyazov T, Omarali B, Shintemirov A. A novel low-cost 4-DOF wireless human arm motion tracker. In: Proceedings of the 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob). Singapore, Singapore: IEEE, 2016.157-162 [117] Mihelj M. Inverse kinematics of human arm based on multisensor data integration. Journal of Intelligent and Robotic Systems, 2006, 47(2):139-153 doi: 10.1007/s10846-006-9079-8 [118] Mazomenos E B, Biswas D, Cranny A, Rajan A, Maharatna K, Achner J, et al. Detecting elementary arm movements by tracking upper limb joint angles with MARG sensors. IEEE Journal of Biomedical and Health Informatics, 2016, 20(4):1088-1099 doi: 10.1109/JBHI.2015.2431472 [119] Comotti D, Caldara M, Galizzi M, Locatelli P, Re V. Inertial based hand position tracking for future applications in rehabilitation environments. In: Proceedings of the 6th International Workshop on Advances in Sensors and Interfaces (IWASI). Gallipoli, Italy: IEEE, 2015.222-227 [120] Bae J, Tomizuka M. A tele-monitoring system for gait rehabilitation with an inertial measurement unit and a shoetype ground reaction force sensor. Mechatronics, 2013, 23(6):646-651 doi: 10.1016/j.mechatronics.2013.06.007 [121] Wang Q, Markopoulos P, Yu B, Chen W, Timmermans A. Interactive wearable systems for upper body rehabilitation:a systematic review. Journal of Neuroengineering and Rehabilitation, 2017, 14:Article No. 20 doi: 10.1186/s12984-017-0229-y [122] Salarian A, Russmann H, Vingerhoets F J G, Dehollain C, Blanc Y, Burkhard P R, et al. Gait assessment in Parkinson.s disease:toward an ambulatory system for longterm monitoring. IEEE Transactions on Biomedical Engineering, 2004, 51(8):1434-1443 doi: 10.1109/TBME.2004.827933 [123] Macko R F, Haeuber E, Shaughnessy M, Coleman K L, Boone D A, Smith G V, et al. Microprocessor-based ambulatory activity monitoring in stroke patients. Medicine and Science in Sports and Exercise, 2002, 34(3):394-399 doi: 10.1097/00005768-200203000-00002 [124] Zheng H R, Yang M J, Wang H Y, McClean S. Machine learning and statistical approaches to support the discrimination of neuro-degenerative diseases based on gait analysis. Intelligent Patient Management. Berlin, Heidelberg: Springer, 2017.57-70 [125] Frank J, Mannor S, Precup D. Activity and gait recognition with time-delay embeddings. In: Proceedings of the 24th AAAI Conference on Artificial Intelligence. Atlanta, America: AAAI Press, 2010.1581-1586 [126] Mantyjarvi J, Lindholm M, Vildjiounaite E, Makela S M, Ailisto H A. Identifying users of portable devices from gait pattern with accelerometers. In: Proceedings of the 2005 IEEE International Conference on Acoustics, Speech, and Signal Processing. Philadelphia, USA: IEEE, 2005.973-976 [127] Vignais N, Miezal M, Bleser G, Mura K, Gorecky D, Marin F. Innovative system for real-time ergonomic feedback in industrial manufacturing. Applied Ergonomics, 2013, 44(4):566-574 doi: 10.1016/j.apergo.2012.11.008 [128] Álvarez D, Alvarez J C, González R C, López A M. Ambulatory human upper limb joint motion monitoring. In: Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings. Graz, Austria: IEEE, 2012.15-19 [129] Aziz O, Park E J, Mori G, Robinovitch S N. Distinguishing the causes of falls in humans using an array of wearable triaxial accelerometers. Gait and Posture, 2014, 39(1):506-512 doi: 10.1016/j.gaitpost.2013.08.034 [130] Shi G Y, Chan C S, Li W J, Leung K S, Zou Y X, Jin Y F. Mobile human airbag system for fall protection using MEMS sensors and embedded SVM classifier. IEEE Sensors Journal, 2009, 9(5):495-503 doi: 10.1109/JSEN.2008.2012212 [131] Miller N, Jenkins O C, Kallmann M, Mataric M J. Motion capture from inertial sensing for untethered humanoid teleoperation. In: Proceedings of the 4th IEEE/RAS International Conference on Humanoid Robots. Santa Monica, USA: IEEE, 2004.547-565 [132] Peppoloni L, Brizzi F, Avizzano C A, Ruffaldi E. Immersive ROS-integrated framework for robot teleoperation. In: Proceedings of the 2015 IEEE Symposium on 3D User Interfaces (3DUI). Arles, France: IEEE, 2015.177-178 [133] Rodriguez-Angeles A, Guzman-Gutierrez J L, Cruz-Villar C. User wearable interface based on inertial sensors for unilateral master-slave robot teleoperation. In: Proceedings of the 7th International Conference on Electrical Engineering Computing Science and Automatic Control. Tuxtla Gutierrez, Mexico: IEEE, 2010.458-463 [134] 王斐, 齐欢, 周星群, 王建辉.基于多源信息融合的协作机器人演示编程及优化方法.机器人, 2018, 40(4):551-559 http://d.old.wanfangdata.com.cn/Periodical/jqr201804019Wang Fei, Qi Huan, Zhou Xing-Qun, Wang Jian-Hui. Demonstration programming and optimization method of cooperative robot based on multi-source information fusion. Robot, 2018, 40(4):551-559 http://d.old.wanfangdata.com.cn/Periodical/jqr201804019 [135] Zhang Y Z, Chen K, Yi J G. Rider trunk and bicycle pose estimation with fusion of force/inertial sensors. IEEE Transactions on Biomedical Engineering, 2013, 60(9):2541-2551 doi: 10.1109/TBME.2013.2260339 [136] Zhang Y Z, Chen K, Yi J G, Liu T, Pan Q. Whole-body pose estimation in human bicycle riding using a small set of wearable sensors. IEEE/ASME Transactions on Mechatronics, 2016, 21(1):163-174 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=6e83bc11f12a36dea19ef67007601093 [137] Walsh M, Barton J, O'Flynn B, O'Mathuna C, Tyndyk M. Capturing the overarm throw in darts employing wireless inertial measurement. In: Proceedings of the 2011 IEEE Sensors. Limerick, Ireland: IEEE, 2011.1441-1444 [138] Ghasemzadeh H, Jafari R. Coordination analysis of human movements with body sensor networks:a signal processing model to evaluate baseball swings. IEEE Sensors Journal, 2011, 11(3):603-610 doi: 10.1109/JSEN.2010.2048205 [139] Blake A, Grundy C. Evaluation of motion capture systems for Golf swings: optical vs. gyroscopic. In: Proceedings of the 30th International Conference on Information Technology Interfaces. Dubrovnik, Croatia: IEEE, 2008.409-414 [140] Supej M. 3D measurements of alpine skiing with an inertial sensor motion capture suit and GNSS RTK system. Journal of Sports Sciences, 2010, 28(7):759-769 doi: 10.1080/02640411003716934 [141] Brodie M, Walmsley A, Page W. Fusion motion capture:a prototype system using inertial measurement units and GPS for the biomechanical analysis of ski racing. Sports Technology, 2008, 1(1):17-28 doi: 10.1080/19346182.2008.9648447 [142] De Magalhaes F A, Vannozzi G, Gatta G, Fantozzi S. Wearable inertial sensors in swimming motion analysis:a systematic review. Journal of Sports Sciences, 2015, 33(7):732-745 doi: 10.1080/02640414.2014.962574 [143] Callaway A J, Cobb J E, Jones I. A comparison of video and accelerometer based approaches applied to performance monitoring in swimming. International Journal of Sports Science and Coaching, 2009, 4(1):139-153 doi: 10.1260/1747-9541.4.1.139 [144] Higginson B K. Methods of running gait analysis. Current Sports Medicine Reports, 2009, 8(3):136-141 doi: 10.1249/JSR.0b013e3181a6187a [145] Norris M, Anderson R, Kenny I C. Method analysis of accelerometers and gyroscopes in running gait:a systematic review. Proceedings of the Institution of Mechanical Engineers, Part P:Journal of Sports Engineering and Technology, 2014, 228(1):3-15 doi: 10.1177/1754337113502472 [146] Yuan Q L, Chen I M. Kinematic uncertainties in human motion tracking and interaction. Advances on Theory and Practice of Robots and Manipulators. Cham: Springer, 2014.491-499 [147] Kim M, Lee D. Wearable inertial sensor based parametric calibration of lower-limb kinematics. Sensors and Actuators A:Physical, 2017, 265:280-296 doi: 10.1016/j.sna.2017.07.017 -

 下载:
下载:

图(5)
计量
- 文章访问数: 4594
- HTML全文浏览量: 2617
- PDF下载量: 540
- 被引次数: 0
