

-
摘要: 针对无迹卡尔曼滤波(Unscented Kalman fllter,UKF)在强非线性系统中估计效果差的问题,提出了双层无迹卡尔曼滤波(Double layer unscented Kalman filter,DLUKF)算法,该算法用带权值的采样点表征先验分布,而后用内层UKF算法对每个采样点进行更新,最后引入外层UKF算法的更新机制得到估计值和估计协方差.仿真结果表明,相比于传统算法,所提的DLUKF算法可以在较低计算负载下获得较高滤波估计精度.
-
关键词:
- 状态估计 /
- 采样策略 /
- 无迹卡尔曼滤波 /
- 改进的无迹卡尔曼滤波 /
- 无迹粒子滤波
Abstract: The unscented Kalman filter (UKF) has the problem of the inaccurate estimation in strong nonlinear systems. To solve this problem, the double layer unscented Kalman filter (DLUKF) algorithm is proposed. In the proposed algorithm, the weighted sampling points are used to represent the prior distribution, and then the inner layer UKF algorithm is used to update each sampling point. Finally, the state estimations are obtained by the update mechanism of the outer layer UKF algorithm. Simulation results show that the proposed algorithm not only has a low computational complexity, but also has a very good estimation accuracy, compared with the existing filtering algorithms.1) 本文责任编委 朱纪洪 -
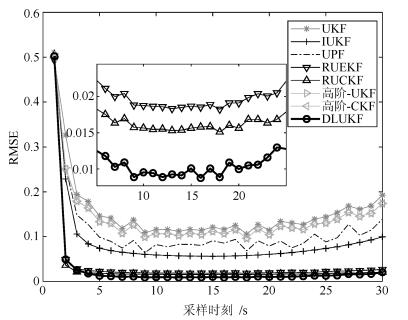
表 1 各算法计算时间及RMSE对比分析表
Table 1 The calculation time and RMSE of each algorithm
算法 运行时间(s) 平均RMSE UKF 0.0002 0.1566 IUKF 0.0014 0.0881 RUEKF 0.0006 0.0378 RUCKF 0.0031 0.0337 高阶UKF 0.0006 0.1434 高阶CKF 0.0006 0.1437 UPF (100) 0.1032 0.1153 UPF (200) 0.2097 0.0714 UPF (300) 0.3200 0.0626 UPF (400) 0.4296 0.0564 UPF (500) 0.5416 0.0476 DLUKF 0.0016 0.0297  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数设置
Table 2 The Simulation parameters
参数 $T$ $q$ ${\sigma _{1r}}$ ${\sigma _{1\varepsilon }}$ ${\sigma _{2r}}$ ${\sigma _{2\varepsilon }}$ $\varepsilon $ 数值 1 1 20 m 0.2$^{o}$ 200 m 0.2$^{o}$ 0.1
下载: 导出CSV
表 3 各个算法的性能
Table 3 The performance of each algorithm
算法 运行时间(s) 平均RMSE UKF 0.0059 99.8709 IUKF 0.0424 85.0107 RUEKF 0.0150 100.2616 RUCKF 0.0397 99.8704 高阶UKF 0.0193 100.4763 高阶CKF 0.0191 99.7558 UPF (300) 3.5953 88.2638 UPF (400) 4.8406 86.5004 UPF (500) 6.0552 85.8206 UPF (600) 7.2596 85.1056 UPF (700) 8.4211 84.6700 UPF (800) 9.6178 83.2706 UPF (900) 10.8389 82.9057 UPF (1 000) 12.0105 82.4258 DLUKF 0.0757 78.5559
下载: 导出CSV
-
[1] Song W J, Yang Y, Fu M Y, Kornhauser A, Wang M L. Critical rays self-adaptive particle filtering SLAM. Journal of Intelligent and Robotic Systems, 2018, 92(1):107-124 [2] Zhang T, Zhu Y Y, Zhou F, Yan Y X, Tong J W. Coarse alignment technology on moving base for SINS based on the improved quaternion filter algorithm. Sensors, 2017, 17(6):1424 doi: 10.3390/s17061424 [3] 朱书军, 刘伟峰, 崔海龙.基于广义标签多伯努利滤波的可分辨群目标跟踪算法.自动化学报, 2017, 43(12):2178-2189 http://www.aas.net.cn/CN/abstract/abstract19191.shtmlZhu Shu-Jun, Liu Wei-Feng, Cui Hai-Long. Multiple resolvable groups tracking using the GLMB filter. Acta Automatica Sinica, 2017, 43(12):2178-2189 http://www.aas.net.cn/CN/abstract/abstract19191.shtml [4] 胡艳艳, 金增旺, 薛晓玲, 孙长银.基于异步IMM融合滤波的网络化系统故障诊断.自动化学报, 2017, 43(8):1329-1338 http://www.aas.net.cn/CN/abstract/abstract19107.shtmlHu Yan-Yan, Jin Zeng-Wang, Xue Xiao-Ling, Sun Chang-Yin. Fault diagnosis for networked systems by asynchronous IMM fusion filtering. Acta Automatica Sinica, 2017, 43(8):1329-1338 http://www.aas.net.cn/CN/abstract/abstract19107.shtml [5] 李军, 万文军, 胡康涛.一种基于点频滤波器的微分信号提取方法.自动化学报, 2017, 43(3):478-486 http://www.aas.net.cn/CN/abstract/abstract19026.shtmlLi Jun, Wan Wen-Jun, Hu Kang-Tao. A new method for extraction of process difierential signal based on single-frequency-pass fllter. Acta Automatica Sinica, 2017, 43(3):478-486 http://www.aas.net.cn/CN/abstract/abstract19026.shtml [6] 申屠晗, 薛安克, 周治利.多传感器高斯混合PHD融合多目标跟踪方法.自动化学报, 2017, 43(6):1028-1037 http://www.aas.net.cn/CN/abstract/abstract19078.shtmlShen Tu-Han, Xue An-Ke, Zhou Zhi-Li. Multi-sensor Gaussian mixture PHD fusion for multi-target tracking, Acta Automatica Sinica, 2017, 43(6):1028-1037 http://www.aas.net.cn/CN/abstract/abstract19078.shtml [7] Kalman R E. A new approach to linear filtering and prediction problems. Journal of Basic Engineering Transactions, 1960, 82:35-45 doi: 10.1115/1.3662552 [8] Arulampalam M S, Maskell S, Gordon N, Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Transactions on Signal Processing, 2002, 50(2):174-188 doi: 10.1109/78.978374 [9] Julier S J, Uhlmann J K. Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92(3):401-422 doi: 10.1109/JPROC.2003.823141 [10] 潘泉, 杨峰, 叶亮, 梁彦, 程咏梅.一类非线性滤波器——UKF综述.控制与决策, 2005, 20(5):481-489 doi: 10.3321/j.issn:1001-0920.2005.05.001Pan Quan, Yang Feng, Ye Liang, Liang Yan, Cheng Yong-Mei. Survey of a kind of nonlinear filters——UKF. Control and Decision, 2005, 20(5):481-489 doi: 10.3321/j.issn:1001-0920.2005.05.001 [11] Peng S, Chen C, Shi H, Yao Z. State of charge estimation of battery energy storage systems based on adaptive unscented Kalman filter with a noise statistics estimator. IEEE Access, 2017, 13202-13212 [12] Merwe R V D, Wan E A. The square-root unscented Kalman filter for state and parameter-estimation. IEEE International Conference on Acoustics, Speech, and Signal Processing, 2001. 3461-3464 doi: 10.1111-j.1365-2559.2010.03597.x/ [13] 占荣辉, 郁春来, 万建伟.简化UKF算法在单站无源目标跟踪中的应用.现代雷达, 2007, 29(3):42-46 doi: 10.3969/j.issn.1004-7859.2007.03.012Zhan Rong-Hui, Yu Chun-Lai, Wan Jian-Wei. Aplication of simplified UKF algorithm to single observer passive target tracking. Modern Radar, 2007, 29(3):42-46 doi: 10.3969/j.issn.1004-7859.2007.03.012 [14] Zhan R, Wan J. Iterated unscented Kalman filter for passive target tracking. Aerospace and Electronic Systems IEEE Transactions on, 2007, 43(3):1155-1163 doi: 10.1109/TAES.2007.4383605 [15] Zanetti. Recursive update filtering for nonlinear estimation. IEEE Transactions on Automatic Control, 2012, 57(6):1481-1490 doi: 10.1109/TAC.2011.2178334 [16] Huang Y L, Zhang Y G, Li N, Zhao L. Design of sigma-point Kalman filter with recursive updated measurement. Circuits Systems and Signal Processing, 2016, 35(5):1767-1782 doi: 10.1007/s00034-015-0137-y [17] Lerner U N. Hybrid Bayesian Networks for Reasoning about Complex Systems.[Ph.D. thesis], Stanford University, USA, 2002. [18] 张勇刚, 黄玉龙, 武哲民, 李宁.一种高阶无迹卡尔曼滤波方法.自动化学报, 2014, 40(5):838-848 http://www.aas.net.cn/CN/abstract/abstract18352.shtmlZhang Yong-Gang, Huang Yu-Long, Wu Zhe-Min, Li Ning. A high order unscented Kalman filtering method. Acta Automatica Sinica, 2014, 40(5):838-848 http://www.aas.net.cn/CN/abstract/abstract18352.shtml [19] Jia B, Xin M, Cheng Y. High-degree cubature Kalman filter. Automatica, 2013, 49(2):510-518 doi: 10.1016/j.automatica.2012.11.014 [20] Zhang Y, Huang Y, Li N, Zhao L. Embedded cubature Kalman filter with adaptive setting of free parameter. Signal Processing, 2015, 114(C):112-116 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=1baebea928940e67256ccd3de6879aed [21] Zhang Y, Huang Y, Li N, Zhao L. Interpolatory cubature Kalman filters. Control Theory and Applications Iet, 2015, 9(11):1731-1739 doi: 10.1049/iet-cta.2014.0873 [22] Merwe R V D, Doucet A, Freitas N D, Wan E. The unscented particle filter. International Conference on Neural Information Processing Systems. MIT Press, 2000: 563-569 [23] Wang X, Li T, Sun S, Corchado J M. A survey of recent advances in particle filters and remaining challenges for multi-target tracking, Sensors, 2017, 17(12):2707 doi: 10.3390/s17122707 -

 下载:
下载:



图(3) / 表(3)
计量
- 文章访问数: 3741
- HTML全文浏览量: 536
- PDF下载量: 726
- 被引次数: 0
