

-
摘要:
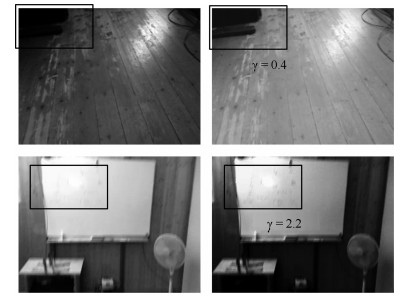
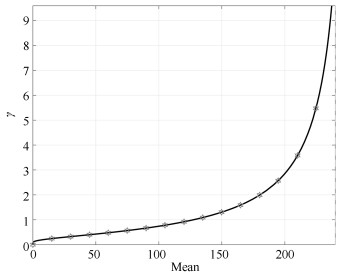
针对移动机器人视觉同步定位与地图创建中由于相机大角度转动造成的帧间匹配失败以及跟踪丢失等问题, 提出了一种基于局部图像熵的细节增强视觉里程计优化算法. 建立图像金字塔, 划分图像块进行均匀化特征提取, 根据图像块的信息熵判断其信息量大小, 将对比度低以及梯度变化小的图像块进行删除, 减小图像特征点计算量. 对保留的图像块进行亮度自适应调整, 增强局部图像细节, 尽可能多地提取能够表征图像信息的局部特征点作为相邻帧匹配以及关键帧匹配的关联依据. 结合姿态图优化方法对位姿累计误差进行局部和全局优化, 进一步提高移动机器人系统性能. 采用TUM数据集测试验证, 由于提取了更能反映物体纹理以及形状的特征属性, 本文算法的运动跟踪成功率最高可提升至60 % 以上, 并且测量的轨迹误差、平移误差以及转动误差都有所降低. 与目前ORB-SLAM2系统相比, 本文提出的算法不但提高了移动机器人视觉定位精度, 而且满足实时SLAM的应用需要.
Abstract:For the problems of failed matching and tracking loss due to big camera rotation in simultaneous localization and mapping (SLAM) for mobile robots, an optimized detail enhancement algorithm of visual odometry based on the local image entropy is proposed. The image pyramid is built and is divided into blocks on each level to extract features homogeneously. The information of each image block is determined through its entropy value and the blocks with low contrast and small intensity gradient will be deleted to reduce feature calculation. Nonlinear and adaptive illumination adjustment on each reserved block is applied to increase local image details. Local features that representing image information is preserved as much as possible to be the correlations between adjacent frames and keyframes. Combined with the pose graph optimization method, the local and global optimization of accumulation error is carried out to further improve the system performance for mobile robot. The proposed method is verifled on the TUM dataset. Since using the feature properties which are more reflective of texture and shape, the maximum success rate of motion tracking is increased to over 60 %. And the results also show that the tracking error, translational error and rotation error is decreased. Compared with the original system ORB-SLAM2, this method can not only improve visual positioning accuracy of the mobile robot, but also meet the application need of real-time SLAM requirement.
-
Key words:
- SLAM /
- visual odometry /
- sparse feature /
- information entropy /
- pose-graph optimization
-
焚烧可以实现城市固体废物(Municipal solid waste, MSW)的减量化、无害化和资源化, 是MSW处理的主要方式之一[1-2]. 在MSW焚烧过程中, 炉温是评估焚烧过程运行合格与否的关键指标之一. 为了保证焚烧过程中二噁英气体被完全分解, 炉温需要持续控制在850 ℃以上[3]. 然而, 在焚烧炉内的高温环境下, 炉内热电偶存在易损坏和精度低等问题, 并且由于焚烧过程具有滞后性, 操作人员难以及时判断炉温变化情况. 因此, 构建炉温预测模型, 对指导与优化MSW焚烧过程稳定运行, 具有现实意义.
目前, 炉温预测模型主要包括机理模型和数据驱动模型两类. 机理模型是根据焚烧过程中固、气相反应的物理化学变化以及能量、动量守恒等先验知识, 确定炉排速度、一次和二次风机风量等操作变量与炉温的映射关系[4-5]. 虽然这类模型在可靠性和解释性方面具有优势, 但焚烧过程机理的复杂性和MSW热值的不确定性导致机理模型的预测精度无法保证. 而以人工神经网络为代表的数据驱动模型, 无需获取焚烧过程中的复杂机理和先验知识, 通过运行数据, 学习输入变量与炉温之间的映射关系[6-7]. 这类模型的训练算法普遍采用误差反向传播算法, 存在收敛速度慢和容易陷入局部最优等问题. 随机学习技术通过随机分配隐含层输入权重和偏置, 将神经网络模型训练问题转化为求解线性优化问题[8], 可以实现神经网络的快速训练. Wang等[9]引入一种依赖于数据的监督机制, 递增式地快速构建神经网络模型, 从而获得了具有万能逼近性质的随机配置网络(Stochastic configuration network, SCN)模型. 该模型在参数建模领域的成功应用, 为构建焚烧过程炉温预测模型提供了技术支持[10-12]. 然而, 焚烧过程数据存在异常值和特征变量维度高的现象, 使得SCN模型的准确性和泛化能力仍有待提升.
在提升SCN模型对异常值的鲁棒性方面, 文献[13]将核密度估计方法与M估计相结合, 并采用加权最小二乘法计算模型输出权重, 提升了SCN模型对异常值的鲁棒性. 文献[14]使用最大相关熵准则度量训练样本的惩罚权重, 在提升SCN模型鲁棒性方面, 有不错的效果. 此外, 工业过程的复杂性和不确定性导致单一分布难以恰当描述样本中异常值的分布情况, 文献[15]和文献[16]分别采用将高斯分布与若干个拉普拉斯分布的混合分布以及混合t分布, 作为训练样本的异常值分布, 均在不同程度上缓解了异常值对建模性能的影响. 但随着特征变量维度的增加, 单个SCN模型的泛化能力难以保证.
在具有高维特征变量情况下, 虽然特征选择与特征提取技术通过选择部分重要特征或提取高维数据中的主成分来构建数据驱动模型[17-18], 但可能损失高维特征数据中蕴含的部分信息, 从而影响模型准确性. 文献[19]提出一种异构特征神经网络集成的框架, 该框架以SCN为基模型, 并通过负相关学习(Negative correlation learning, NCL)策略[20], 实现了基模型之间的同步训练, 在高维特征数据建模方面, 具有不错的应用前景. 但该方法未考虑各组异构特征对输出变量的重要性以及异常值对模型准确性的影响.
基于上述分析, 本文综合考虑MSW焚烧过程数据中同时存在异常值和高维特征变量两种情况, 提出一种用于构建MSW焚烧过程炉温预测模型的鲁棒加权异构特征集成建模方法. 本文主要贡献如下: 1)综合焚烧过程运行机理以及焚烧炉排构造, 将高维特征变量划分为异构特征集合, 应用后续集成建模; 2)在异构特征集成框架的基础上, 采用互信息和皮尔逊相关系数(后续简称“相关系数”),确定每组异构特征对输出变量的贡献度, 从而明确每个基模型的重要性; 3)采用文献[16]的鲁棒SCN构建基模型, 并综合各个基模型的训练过程确定样本惩罚权重; 4)设计一种鲁棒加权NCL策略, 实现基模型之间的鲁棒同步训练. 采用焚烧过程的炉温历史数据, 验证了本文方法的有效性和优越性.
1. MSW焚烧过程
MSW焚烧过程的工艺流程如图1所示. MSW焚烧过程由固体废物储运系统、固体废物焚烧系统、余热锅炉系统、蒸汽发电系统和烟气处理系统5个系统组成, 各系统的具体功能如下:
1)固体废物储运系统. 生活中产生的MSW由固体废物清运车送至固体废物储蓄池内. MSW具有高水分、低热值的特点, 需要在储蓄池内静置3 ~ 10天, 以完成MSW的脱水、发酵环节, 并由抓手送至焚烧炉的进料器, 进行焚烧.
2)固体废物焚烧系统. 预处理后的MSW由进料器送入干燥炉排. 在一次风对流换热以及炉内高温辐射的作用下, 完成MSW的水分干燥过程; 干燥后的MSW经过2段燃烧炉排, 在高温作用下, 析出挥发分, 并与一次风中的氧气在一燃室燃烧, 未充分燃烧的挥发分气体在二次风的作用下, 进一步燃烧; MSW中的固定碳在燃烬段炉排燃烧.
3)余热锅炉系统和蒸汽发电系统. 由MSW焚烧产生的高温气体在烟气通道内, 依次通过过热器、蒸发器和省煤器, 实现烟气余热回收, 回收的热量将冷却水转化为主蒸汽, 用于汽轮机发电, 从而实现焚烧过程的资源化.
4)烟气处理系统. 焚烧过程产生的烟气将分别通过脱酸反应、布袋除尘设备实现烟气处理, 并在引风机的作用下, 由烟囱排出.
在焚烧工艺流程中, 炉温通常指一燃室烟气的平均温度, 是衡量焚烧过程运行是否正常的关键指标之一. 目前, 现场采用热电偶实时测量炉温的变化情况. 然而, 在炉内高温环境下, 热电偶存在精 度低和易损坏等问题. 并且, 炉温变化具有滞后性, 即调整过程变量后, 炉内的热电偶难以及时反映炉温的变化情况. 基于上述炉温的特点可知, 构建炉温预测模型, 对保证焚烧过程安全稳定运行, 具有现实意义.
从构建炉温预测模型的角度看, 影响炉温的机理反应主要包括水分干燥、挥发分析出、挥发分燃烧等多阶段的物理化学变化[21]. 这导致构建炉温预测模型涉及的特征变量数量众多, 变量明细如表A1所示. 采用特征选择或特征提取方法可以降低预测模型的输入变量维度, 提升模型的泛化能力, 但降低特征维度会损失过程数据中蕴含的部分信息. 另外, 焚烧过程数据中包含的异常值会导致炉温预测的准确性降低. 因此, 本文的研究重点是在焚烧过程数据具有高维特征变量和异常值的情况下, 提升炉温预测模型的准确性和泛化能力.
2. 鲁棒加权异构特征集成建模方法
针对焚烧过程数据同时存在异常值和高维特征变量的特点, 提出一种鲁棒加权异构特征集成建模方法, 着重提升MSW焚烧过程炉温预测模型的准确性和泛化能力. 下面分别介绍该方法的建模策略和实现过程.
2.1 建模策略
鲁棒加权异构特征集成建模方法的建模策略如图2所示. 首先, 依据焚烧过程机理和炉排结构, 将MSW焚烧过程炉温的高维特征变量训练集划分为异构特征集合, 并以互信息和相关系数综合评估每组异构特征对炉温的贡献度; 其次, 采用文献[16]的鲁棒SCN建模方法, 构建每组异构特征对应的基模型, 并综合所有基模型的训练情况, 确定训练样本的惩罚权重; 最后, 根据训练样本的惩罚权重和每组异构特征的贡献度, 设计一种鲁棒加权NCL策略, 实现基模型间的同步训练, 从而获得最终的炉温预测模型.
图2中, $ D $表示炉温的高维特征训练集, $ d $表示输入变量维度, $ N $表示训练样本数量; $ D_p $表示第$ p $组异构特征对应的训练子集, $ d_p $表示第$ p $组异构特征的维度, $p = 1,2,\cdots,12$, 所有训练集的输出变量保持一致; $ {\tilde A_p} $表示第$ p $组异构特征对炉温的贡献度, 由输入变量和输出变量的互信息和相关系数综合确定; $ e_p $表示第$ p $个基模型的损失函数, $ \Phi $是训练样本的惩罚权重, $ H_p $和$ \beta_p $分别表示第$ p $个基模型的隐含层输出矩阵和输出权重矩阵, $ H $和$ \beta $分别由所有基模型隐含层输出矩阵和输出权重矩阵组成; $ \mu $为NCL惩罚因子, $ Y $为相应的输出矩阵.
2.2 实现过程
基于上述建模策略, 本节分别介绍异构特征划分与贡献度评估、基模型训练和鲁棒加权同步训练的实现过程, 并在最后给出算法伪代码.
2.2.1 异构特征划分与贡献度评估
从焚烧过程运行机理看, 炉温受水分干燥、挥发分析出、挥发分燃烧等阶段影响[21-22]. 另外, 从炉排上方热电偶分布情况看, 炉排上方安装了12组K型铠装热电偶, 分布情况如图3所示. 综合考虑各阶段的运行机理和炉排上方热电偶分布, 将表A1中的特征变量划分为12组异构特征, 每组异构特征包括当前段的炉排速度、一次风量、炉排出口温度、一次风温度、一次风机压力、二次风量和当前炉温7个变量. 此时, 异构特征对应的训练集记为$ D_p=\{X_p,Y\} $, 其中$ p=1,2,\cdots,12 $, $ X_p $为第$ p $个训练集的输入矩阵.
首先, 对第$ p $个训练集$ D_p $, 分别计算每个输入变量与炉温的互信息和相关系数:
$$ \begin{align} I({x_i};Y) = \sum\limits_{x \in {x_i}} {\sum\limits_{y \in Y} {p(x,y){\log_2} \frac{{p(x,y)}}{{{p_x}(x){p_y}(y)}}} } \end{align} $$ (1) $$ \begin{align} \rho ({x_i};Y) = \frac{{{\rm{Cov}}({x_i},Y)}}{{\sqrt {{\rm{Var}}({x_i}){\rm{Var}}(Y)} }} \end{align} $$ (2) 式中, $ x_i\in{\bf{R}}^{1\times N} $表示第$ i $个输入变量, $ Y\in {\bf{R}}^{1 \times N} $表示输出矩阵即炉温; $ p_x(x) $和$ p_y(y) $分别表示$ x $和$ y $的边缘概率分布; $ p(x, y) $表示$ x $和$ y $的联合概率分布; $ i = 1, 2,\cdots,d_p $, $ d_p $为第$ p $组异构特征的特征数量, $ p = 1, 2,\cdots, 12 $; ${\rm{Cov}}(x_i, Y)$表示$ x_i $与$ Y $之间的协方差; ${\rm{Var}}(x_i)$和${\rm{Var}}(Y)$分别表示$ x_i $与$ Y $之间的方差. 然后, 采用互信息和相关系数的乘积作为每个特征变量与输出变量相关性的评估指标, 并以所有变量与炉温相关性的平均值表示第$ p $组异构特征的贡献度:
$$ \begin{align} \left\{ \begin{aligned} &{a_i} = I({x_i};Y)\rho ({x_i};Y),\;i = 1,2,\cdots,{d_p}\\ &{A_p} = \frac{1}{{{d_p}}}\sum\limits_{i = 1}^{{d_p}} {{a_i}} \end{aligned} \right. \end{align} $$ (3) 式中, $ a_i $表示第$ i $个特征变量与炉温的相关性; $ A_p $表示第$ p $组异构特征的贡献度, 故$ A_p $越大, 表示该异构特征对炉温影响越大.
最后, 对每组异构特征的贡献度进行归一化处理:
$$ \begin{align} {\tilde A_p} = \frac{{{A_p}}}{{\sum\limits_{p = 1}^{12} {{A_p}} }} \end{align} $$ (4) 式中, $ \tilde A_p $表示归一化后, 第$ p $组异构特征的贡献度.
2.2.2 基模型训练
焚烧过程数据中的异常值会降低基模型准确性, 因此, 本节采用基于混合t分布的鲁棒SCN[16], 实现基模型的训练过程. 该方法实现步骤如下:
步骤1. 初始化基模型的最大隐含层神经元数量、最大随机配置次数和混合t分布的位置参数、尺度参数和自由度;
步骤2. 采用SC-III算法, 确定基模型的网络结构和连接权重;
步骤3. 计算基模型输出权重在给定训练集下的期望值;
步骤4. 使步骤3中的期望值最大化, 从而确定模型输出权重和混合t分布的位置参数、尺度参数和自由度;
步骤5. 判断算法是否收敛? 若达到收敛条件, 基模型训练结束; 否则, 返回步骤3.
因此, 训练完成的基模型$ M_p $可以表示为:
$$ \begin{split} M_p^{} = \;&H_p^{}\beta _p^{}= \\ &\left[ {\begin{array}{*{20}{c}} {\varphi _{p,1}^{}(x_{p,1}^{})}& \cdots &{\varphi _{p,{L_p}}^{}(x_{p,1}^{})} \\ \vdots & \ddots & \vdots \\ {\varphi _{p,1}^{}(x_{p,N}^{})}& \cdots &{\varphi _{p,{L_p}}^{}(x_{p,N}^{})} \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {\beta _{p,1}^{}} \\ \vdots \\ {\beta _{p,{L_p}}^{}} \end{array}} \right] \end{split} $$ (5) 式中, $ H_p $和$ \beta_p $分别表示第$ p $个基模型的隐含层输出矩阵和输出权重矩阵; $ \varphi(\cdot) $是Sigmoid激活函数; $ L_p $表示第$ p $个基模型的隐含层神经元数量, $p = 1, 2,\cdots,12$. 为了后续表述简洁, 令$H = [ H_1,\cdots, H_{12}]$表示由所有基模型隐含层输出和贡献度乘积构成的矩阵; $ \beta = [\beta_1,\cdots,\beta_{12}] $表示所有基模型输出权重构成的矩阵. 在上述训练过程中, 每个基模型均可获得一组训练样本的惩罚权重矩阵, 综合考虑所有基模型的训练结果, 将所有惩罚权重矩阵的均值作为最终训练集的惩罚权重, 记为$ \Phi $. 此时, 基模型训练过程结束.
注 1. 本节采用基于混合t分布的鲁棒SCN[16]构建基模型, 其优势在于混合t分布具有重尾特性, 且通过调整自由度可以使其概率密度曲线适应不同类型的异常值分布, 故该方法构建的基模型对训练数据中的异常值具有较强的鲁棒性. 此外, 在基模型训练过程中, 可以获得训练样本的惩罚权重, 这为后续鲁棒加权同步训练奠定了基础.
2.2.3 鲁棒加权同步训练
NCL策略是实现神经网络集成模型同步训练的重要方法, 该方法通过在神经网络集成的损失函数中, 引入基模型间的相关惩罚项, 实现基模型输出之间的负相关, 从而降低基模型输出之间的协方差[20]. 文献[19]和文献[23]均采用了NCL策略, 实现了随机学习模型间的同步训练, 从而提升了神经网络集成模型的准确性. 然而, 在MSW焚烧过程中, 由于运行数据中存在服从未知分布的异常值, 导致NCL策略的鲁棒性难以保证. 因此, 本节设计一种鲁棒加权NCL策略, 来实现基模型之间的鲁棒同步训练.
在每个基模型的代价函数中引入训练样本的惩罚权重矩阵$ \Phi $, 则第$ p $个基模型的训练代价函数为:
$$ \begin{split} e_p^{} =\;& \frac{1}{2}\bigg({\left\| {\sqrt \Phi \left( {{H_p}{\beta _p} - Y} \right)} \right\|^2} - \\ &\mu {\left\| {\sqrt \Phi \left( { {H_p}{\beta _p} - H\beta } \right)} \right\|^2}\bigg) \end{split} $$ (6) 式中, $ p = 1,2,\cdots,12 $, $ H_p $和$ \beta_p $分别表示第$ p $个基模型的隐含层输出矩阵和输出权重矩阵, $H = [{\tilde A_1}{H_1},\cdots,{\tilde A_{12}}{H_{12}}]$表示由所有基模型隐含层输出和贡献度乘积构成的矩阵, $ \beta = [\beta_1,\cdots,\beta_{12}]^{\rm {T}} $表示所有基模型输出权重构成的矩阵, $ Y $表示输出矩阵, $ \mu \in [0,1] $表示惩罚因子.
此时, 鲁棒异构特征集成模型的目标函数可以表示为:
$$ \begin{align} {\beta ^*} = \{ \beta _1^*,\cdots,\beta _{12}^*\} = \arg \mathop {\min }\limits_{\beta _p^*} \{ e_p^{}\} \end{align} $$ (7) 式中, $ \beta^* $表示同步训练后集成模型的隐含层输出权重矩阵.
因此, 令${ \frac {{\partial e_p} } {{\partial }\beta _p}} = 0$, 可得:
$$ \begin{split} & \left( {1 - \mu {{\left( {{{\tilde A}_p} - 1} \right)}^2}} \right)H_p^{\text{T}}\Phi {H_p}{\beta _p}\;+\\ &\qquad\mu \left( {1 - {{\tilde A}_p}} \right)H_p^{\text{T}}\Phi {{\tilde H}_p} \beta = H_p^{\text{T}}\Phi Y \end{split} $$ (8) 式中, $ {\tilde H_p} $定义为:
$$ \begin{split} {{\tilde H}_p} = \;&[{{\tilde A}_1}H_1^{},\cdots,{{\tilde A}_{p - 1}}H_{p - 1}^{},\cdots,{0_{N \times {L_p}}},\cdots,\\ & {{\tilde A}_{p + 1}}H_{p + 1}^{},\cdots, {\rm{ }}{{\tilde A}_{12}}H_{12}^{}] \end{split} $$ (9) 式中, $ N $表示训练样本数量, $ L_p $表示第$ p $个基模型的隐含层神经元数量.
对于$ p = 1,2,\cdots, 12 $, 采用线性矩阵运算形式, 可将式(9)表示为:
$$ \begin{align} \mathcal{H}\beta = {H^{\text{T}}}\Phi Y \end{align} $$ (10) 式中, $\mathcal{H}$定义如下:
$$ \begin{split} \mathcal{H} =\;& \left[ {\begin{array}{*{20}{c}} {\begin{array}{*{20}{c}} {{c_{1,1}}{{(H_1^{})}^{\rm{T}}}\Phi H_1^{}}\\ {{c_{2,1}}{{(H_2^{})}^{\rm{T}}}\Phi H_1^{}}\\ \vdots \\ {{c_{12,1}}{{(H_{12}^{})}^{\rm{T}}}\Phi H_1^{}} \end{array}}&{\begin{array}{*{20}{c}} {{c_{1,2}}{{(H_1^{})}^{\rm{T}}}\Phi H_2^{}}\\ {{c_{2,2}}{{(H_2^{})}^{\rm{T}}}\Phi H_2^{}}\\ \vdots \\ {{c_{12,2}}{{(H_{12}^{})}^{\rm{T}}}\Phi H_2^{}} \end{array}} \end{array}} \right.\\ &\qquad\quad\left. {\begin{array}{*{20}{c}}\ \ \ \ \ \ \ \ \ \ \ \begin{array}{l} \cdots \\ \cdots \\ \ddots \\ \cdots \end{array}&{\begin{array}{*{20}{c}} {{c_{1,12}}{{(H_1^{})}^{\rm{T}}}\Phi H_{12}^{}}\\ {{c_{2,12}}{{(H_2^{})}^{\rm{T}}}\Phi H_{12}^{}}\\ \vdots \\ {{c_{12,12}}{{(H_{12}^{})}^{\rm{T}}}\Phi H_{12}^{}} \end{array}} \end{array}} \right] \end{split} $$ (11) 式中, ${c_{i,j}} = \left\{ \begin{gathered} 1 - \mu {({{\tilde A}_i} - 1)^2},i = j \\ \mu (1 - {{\tilde A}_i}){{\tilde A}_j},\;\;\;i \ne j \\ \end{gathered} \right.$, $i = 1, 2,\cdots, 12$, $ j = 1, 2,\cdots,12 $.
根据式(10), 可得基模型隐含层输出权重的解析解:
$$ \begin{align} {\beta ^*} = {\mathcal{H}^\dagger }{H^{\text{T}}}\Phi Y \end{align} $$ (12) 此时, MSW焚烧过程炉温的鲁棒异构特征集成模型构建完毕. 基于上述分析, 鲁棒异构特征集成算法伪代码见算法1.
算法1. 鲁棒加权异构特征集成算法
输入. 训练子集$ D=\{D_1,\cdots,D_{12}\} $.
输出. 鲁棒加权异构特征集成模型.
1)初始化. 鲁棒SCN的超参数、基模型的最大隐含层神经元数量$ L_{max} $、NCL的惩罚因子$ \mu $;
2) for {$ p\leftarrow 1 $ to $ 12 $};
3)用式(1)和式(2)计算每组异构特征与炉温的互信息和相关系数;
4)用式(3)和式(4)计算每组异构特征的贡献度$ {\tilde A_p} $;
5)依据文献[16]的鲁棒SCN, 构建基模型$ M_p $;
6) end;
7)用式(11)计算$\mathcal{H}$;
8)用式(12)更新集成模型输出权重;
9)返回鲁棒加权异构特征集成模型.
注 2. 本文提出的鲁棒加权异构特征集成建模方法以异构特征集成框架为基础, 采用基于混合t分布的鲁棒SCN构建基模型, 保证了基模型对训练数据的鲁棒性. 通过设计鲁棒加权NCL策略, 实现了基模型的同步训练, 并依据每组异构特征的贡献度, 将各个基模型输出的加权平均值作为集成模型的最终输出. 该方法对训练数据中的异常值具有较强的鲁棒性, 并且通过将表A1中的高维特征变量划分为$12 $组异构特征, 降低了基模型的复杂程度, 从而保证了炉温预测模型的泛化能力.
3. 实验测试
本节采用MSW焚烧过程的历史数据, 验证鲁棒加权异构特征集成建模方法的有效性, 并将结果与其他典型集成建模方法进行比较.
3.1 数据准备
本文采用的实验数据为2020年10月北京某焚烧发电厂的历史运行数据, 其中样本采样间隔为5 min且所有数据经过归一化处理. 训练集样本数量为700, 测试集样本数量为200, 验证集样本数量为100, 均由随机采样获得. 输入特征变量维度为42, 输出变量为10 min后的炉温预测值, 详细信息见表A1. 在本文提出的鲁棒加权异构特征集成炉温预测模型中, 依据第2.2.1节内容, 异构特征共划分为12组, 其中第1 ~ 4组对应干燥段炉排, 第5 ~ 8组对应燃烧1段炉排, 第9 ~ 12组对应燃烧2段炉排. 每组异构特征包含对应段的炉排速度、一次风量、炉排出口温度、一次风温度、一次风机压力、二次风量以及当前炉温. 本文实验采用的性能评价指标为均方根误差(Root mean square error, RMSE)和平均绝对误差(Mean absolute error, MAE), 计算公式如下:
$$ \begin{align} {\rm{RMSE}} = \sqrt {\frac{{\sum\limits_{i = 1}^N {{{\left( {{y_i} - {{\hat y}_i}} \right)}^2}} }}{N}} \end{align} $$ (13) $$ \begin{align} {\text{MAE}} = \frac{{\sum\limits_{i = 1}^N {\left| {{y_i} - {{\hat y}_i}} \right|} }}{N} \end{align} $$ (14) 式中, $ N $表示样本数量, $ y_i $表示炉温的真值, $ {\hat y_i} $是炉温的预测值. 为了避免随机参数对实验结果的影响, 所有实验结果均为50次独立重复实验结果的均值和标准差.
为了突显模型对训练数据中异常值的鲁棒性, 在训练样本中, 分别随机选择0%、10%和20%比例的样本作为异常样本, 并将这些样本的输出进行异常化处理, 具体处理方式为:
$$ \begin{align} {y_{i,outlier}} = {y_i} + {\rm{sign}}[{\rm{rand}}(0,1)(\max ({y_i}) - \min ({y_i}))] \end{align} $$ (15) 式中, $ y_i $和$ y_{i,outlier} $分别表示炉温的真实值和处理后的异常值, rand(0, 1)表示0和1之间的随机数, ${\rm{max}}(y_i)$和${\rm{min}}(y_i)$分别表示正常工况下炉温的最大值和最小值. 为了使异常值分布更加不平衡, 正偏差异常值(sign = 1)和负偏差异常值(sign = −1)的比例设置为2:1.
3.2 性能测试
本节对基于鲁棒加权异构特征集成的炉温预测模型开展性能测试. 为了后续表述简洁, 将本文方法命名为Mt-RSCNE. 由图4的异构特征集合对炉温的互信息、相关系数和贡献度的对比可以看出, 第1 ~ 4组的贡献度较高, 说明干燥段炉排对应的特征变量对炉温变化的影响较大. 其原因在于MSW具有高水分、低热值的特点, 随着焚烧过程运行, 在水分干燥过程中吸收的热量差异较大. 因此, 结果与焚烧过程的运行机理存在一致性.
 图 4 每组异构特征集合对炉温的互信息、相关系数和贡献度对比Fig. 4 Comparison of mutual information, correlation coefficient, and contribution of each heterogeneous feature set to furnace temperature
图 4 每组异构特征集合对炉温的互信息、相关系数和贡献度对比Fig. 4 Comparison of mutual information, correlation coefficient, and contribution of each heterogeneous feature set to furnace temperature基模型隐含层神经元数量$ L_{max} $和NCL惩罚因子$ \mu $是Mt-RSCNE模型中的两个重要参数. 为了验证模型对上述超参数的鲁棒性, 图5和图6分别为$ L_{max} $和$ \mu $取不同数值时, 模型测试误差的分布情况. 其中, $ L_{max} $的取值为10 ~ 50, 间隔数量为5; $ \mu $的取值为0.1 ~ 0.9, 间隔数量为0.1. 由图5可以看出, 随着基模型隐含层神经元数量的增加, 炉温预测模型50次实验的测试误差均值变化较小, 但测试误差的标准差变化较大, 说明当$ L_{max} $较大时, 炉温预测模型可能出现过拟合现象. 因此, 在后续实验中, 基模型隐含层神经元数量设置为15. 由图6可以看出, $ \mu $的取值对炉温预测模型的测试性能有轻微影响, 但影响并不显著, 说明本文方法对参数$ \mu $具有较好的鲁棒性.
 图 5 $L_{max}$取值为10 ~ 50时, 炉温预测模型在验证集上的误差分布Fig. 5 Error distribution of the furnace temperature prediction model on the verification set with $L_{max}$ from 10 ~ 50
图 5 $L_{max}$取值为10 ~ 50时, 炉温预测模型在验证集上的误差分布Fig. 5 Error distribution of the furnace temperature prediction model on the verification set with $L_{max}$ from 10 ~ 50 图 6 $\mu$取值为0.1 ~ 0.9时, 炉温预测模型在验证集上的误差分布Fig. 6 Error distribution of the furnace temperature prediction model on the verification set with $\mu$ from 0.1 ~ 0.9
图 6 $\mu$取值为0.1 ~ 0.9时, 炉温预测模型在验证集上的误差分布Fig. 6 Error distribution of the furnace temperature prediction model on the verification set with $\mu$ from 0.1 ~ 0.93.3 对比分析
为了验证本文提出的Mt-RSCNE模型在准确性和泛化能力方面的优越性, 本节将该方法与典型建模方法构建的炉温预测模型的预测结果进行对比分析. 为表达简洁, 使用如下缩写表示各建模方法: MoGL-SCNE表示基于混合高斯分布和拉普拉斯分布的集成SCN建模方法[15], SCNE表示基于SCN的经典异构特征集成方法[19], DNNE表示快速去相关神经网络集成方法[23], BESCN表示基于Bootstrap集成的SCN[24].
本文的Mt-RSCNE方法的实验参数设置如下: 基模型隐含层神经元数量为15, 基模型最大配置次数为50, 混合t分布的组分数量为3, 权重分别为0.5、0.3和0.2, 位置参数均为0, 尺度参数分别为0.12、0.11和0.10, 自由度均为4, NCL惩罚因子$ \mu $为0.1. 对比方法参数设置如下: 1) DNNE方法. 基模型数量为12, 基模型隐含层神经元数量为15, 随机权重选择范围为[−1, 1]. 2) SCNE方法. 与本文方法一致. 3) MoGL-SCNE方法. 基模型数量为12, 基模型隐含层神经元数量为15, 混合分布由高斯分布和两个拉普拉斯分布组成. 其中高斯分布的权重为0.8, 均值为0, 方差为0.2, 两个拉普拉斯分布权重均为0.1, 尺度参数均为0.1. 4) BESCN方法. 基模型数量为12, 基模型隐含层神经元数量为15, 误差分布和输出权重先验分布的方差分别为1和0.5. 上述实验参数均采用验证集测试获得.
在训练数据输出中, 分别引入0%、10%和20%比例的异常值时, 上述5种建模方法构建的炉温预测模型的RMSE和MAE分布如图7所示. 由图7可以看出, 采用异构特征集成框架的炉温预测模型(Mt-RSCNE和SCNE)的测试误差明显低于其他方法, 这说明异构特征集成可以缓解高维特征变量对模型准确性和泛化能力的影响. 当训练集引入10%和20%的异常值时, 本文提出的Mt-RSCNE的测试误差变化幅度较小, 说明本文设计的鲁棒加权NCL策略可以提升炉温预测模型对异常数据的鲁棒性. 表1和表2为上述对比结果的具体数值.
 图 7 在不同异常值比例下, 各集成模型对炉温预测的性能对比Fig. 7 Performance comparison of ensemble models for furnace temperature prediction under different percentages of abnormal value
图 7 在不同异常值比例下, 各集成模型对炉温预测的性能对比Fig. 7 Performance comparison of ensemble models for furnace temperature prediction under different percentages of abnormal value 图 8 在20%异常值情况下, 各集成模型输出的散点图Fig. 8 Scatter diagram of the output of each ensemble model under 20% abnormal value表 1 在不同异常值比例下, 各集成炉温预测模型的测试RMSE (均值$\pm$标准差) (℃)Table 1 Test RMSE of each ensemble furnace temperature prediction model under different percentages of abnormal value (mean $\pm$ standard deviation) (℃)
图 8 在20%异常值情况下, 各集成模型输出的散点图Fig. 8 Scatter diagram of the output of each ensemble model under 20% abnormal value表 1 在不同异常值比例下, 各集成炉温预测模型的测试RMSE (均值$\pm$标准差) (℃)Table 1 Test RMSE of each ensemble furnace temperature prediction model under different percentages of abnormal value (mean $\pm$ standard deviation) (℃)异常值比例 (%) Mt-RSCNE DNNE SCNE MoGL-SCNE BESCN 0 16.3 $\pm$ 0.06 18.0 $\pm$ 0.24 16.4 $\pm$ 0.06 17.1 $\pm$ 0.12 17.1 $\pm$ 0.13 10 16.6 $\pm$ 0.06 18.1 $\pm$ 0.23 16.9 $\pm$ 0.11 17.2 $\pm$ 0.14 17.2 $\pm$ 0.20 20 16.6 $\pm$ 0.06 19.6 $\pm$ 0.26 18.0 $\pm$ 0.10 18.6 $\pm$ 0.12 17.9 $\pm$ 0.22 表 2 在不同异常值比例下, 各集成炉温预测模型的测试MAE (均值$\pm$标准差) (℃)Table 2 Test MAE of each ensemble furnace temperature prediction model under different percentages of abnormal value (mean $\pm$ standard deviation) (℃)异常值比例 (%) Mt-RSCNE DNNE SCNE MoGL-SCNE BESCN 0 12.9 $\pm$ 0.06 14.4 $\pm$ 0.23 13.0 $\pm$ 0.07 13.8 $\pm$ 0.12 13.8 $\pm$ 0.13 10 13.1 $\pm$ 0.06 14.3 $\pm$ 0.22 13.3 $\pm$ 0.10 13.5 $\pm$ 0.12 13.7 $\pm$ 0.15 20 13.1 $\pm$ 0.05 15.6 $\pm$ 0.21 14.4 $\pm$ 0.09 15.3 $\pm$ 0.13 14.6 $\pm$ 0.19 为了更直观地表现本文Mt-RSCNE方法对训练数据中异常值的鲁棒性, 图8绘制了上述5种集成炉温预测模型在20%的异常值情况下的散点图. 由图8可以看出, Mt-RSCNE方法对应点的位置更加靠近对角线, 说明该方法得到炉温预测模型的结果更接近真实值. 再次验证了本文方法在炉温预测准确性和泛化能力方面的优越性, 同时也说明了本文方法在工业过程参数建模领域中, 具有一定的应用价值.
4. 结束语
为了提升MSW焚烧过程炉温预测模型的准确性和泛化能力, 本文提出一种鲁棒加权异构特征集成建模方法, 并采用焚烧过程历史运行数据验证了该方法的有效性. 本文的主要贡献如下:
1)针对焚烧过程数据具有高维特征变量的特点, 依据MSW焚烧过程的机理和炉排结构, 将高维特征划分为异构特征集合, 并采用互信息与相关系数, 综合确定每组异构特征对炉温的贡献度;
2)针对焚烧过程数据具有异常值的特点, 采用基于混合t分布的鲁棒SCN构建基模型, 并综合基模型的训练过程确定样本惩罚权重, 从而保证了基模型对数据中异常值的鲁棒性;
3)设计一种鲁棒加权NCL策略, 实现了基模型之间的鲁棒同步训练, 从而提升了炉温预测模型的准确性和泛化能力.
实验结果表明, 与典型集成建模方法相比, 本文构建的MSW焚烧过程炉温预测模型在准确性和泛化能力方面具有优势, 说明该方法在工业过程参数建模领域具有应用价值. 值得注意的是, 该方法的训练模式为离线批量训练, 这导致模型的训练效率会随训练样本数量的增加而降低. 因此, 针对提升模型训练效率或模型在线自适应学习能力的研究, 是未来研究的主要方向.
附录A
表 A1 炉温预测模型过程变量明细Table A1 Process variable details of furnace temperature prediction model序号 名称 单位 1 干燥炉排左内侧速度 % 2 干燥炉排左外侧速度 % 3 干燥炉排右内侧速度 % 4 干燥炉排右外侧速度 % 5 燃烧炉排1左内侧速度 % 6 燃烧炉排1左外侧速度 % 7 燃烧炉排1右内侧速度 % 8 燃烧炉排1右外侧速度 % 9 燃烧炉排2左内侧速度 % 10 燃烧炉排2左外侧速度 % 11 燃烧炉排2右内侧速度 % 12 燃烧炉排2右外侧速度 % 13 干燥炉排左1空气流量 ${\rm {km^3N/h} }$ 14 干燥炉排右1空气流量 ${\rm {km^3N/h} }$ 15 干燥炉排左2空气流量 ${\rm {km^3N/h} }$ 16 干燥炉排右2空气流量 ${\rm {km^3N/h} }$ 17 燃烧段炉排左1-1段空气流量 ${\rm {km^3N/h} }$ 18 燃烧段炉排右1-1段空气流量 ${\rm {km^3N/h} }$ 19 燃烧段炉排左1-2段空气流量 ${\rm {km^3N/h} }$ 20 燃烧段炉排右1-2段空气流量 ${\rm {km^3N/h} }$ 21 燃烧段炉排左2-1段空气流量 ${\rm {km^3N/h} }$ 22 燃烧段炉排右2-1段空气流量 ${\rm {km^3N/h} }$ 23 燃烧段炉排左2-2段空气流量 ${\rm {km^3N/h} }$ 24 燃烧段炉排右2-2段空气流量 ${\rm {km^3N/h} }$ 25 二次风流量 ${\rm {km^3N/h} }$ 26 一次风机出口空气压力 kPa 27 干燥段炉排左内侧温度 ℃ 28 干燥段炉排左外侧温度 ℃ 29 干燥段炉排右内侧温度 ℃ 30 干燥段炉排右外侧温度 ℃ 31 燃烧段炉排1左内侧温度 ℃ 32 燃烧段炉排1左外侧温度 ℃ 33 燃烧段炉排1右内侧温度 ℃ 34 燃烧段炉排1右外侧温度 ℃ 35 燃烧段炉排2左内侧温度 ℃ 36 燃烧段炉排2左外侧温度 ℃ 37 燃烧段炉排2右内侧温度 ℃ 38 燃烧段炉排2右外侧温度 ℃ 39 干燥段炉排进口空气温度 ℃ 40 燃烧段炉排进口空气温度 ℃ 41 一次风加热器出口空气温度 ℃ 42 炉温(当前值) ℃ 43 炉温(预测值) ℃
-
表 1 阈值选取
Table 1 Threshold selection
fr1_desk μ = 0.3 μ = 0.4 μ = 0.5 μ = 0.6 μ = 0.7 平均处理时间 0.063 s 0.064 s 0.062 s 0.063 s 0.06 s 绝对轨迹误差 0.0156 m 0.0156 m 0.0153 m 0.0163 m 0.0165 m 相对平移误差 0.0214 m 0.0215 m 0.0209 m 0.0216 m 0.0218 m 相对旋转误差 1.455° 1.426° 1.412° 1.414° 1.39° 成功跟踪概率 50 % 40 % 62 % 30 % 25 %  下载: 导出CSV
下载: 导出CSV
表 2 轨迹分析结果
Table 2 Trajectory analysis results
图像序列 平均处理时间 绝对轨迹误差 相对平移误差 相对旋转误差 fr1_desk ORB-SLAM2 0.036 s 0.0176 m 0.0241 m 1.532° 优化算法 0.062 s 0.0153 m 0.0209 m 1.412° fr1_360 ORB-SLAM2 0.030 s 0.2031 m 0.1496 m 3.806° 优化算法 0.048 s 0.1851 m 0.1313 m 3.635° fr1_floor ORB-SLAM2 0.028 s 0.0159 m 0.0133 m 0.955° 优化算法 0.051 s 0.0138 m 0.0126 m 0.979° fr1_room ORB-SLAM2 0.037 s 0.0574 m 0.0444 m 1.859° 优化算法 0.057 s 0.047 m 0.0441 m 1.797°
下载: 导出CSV
-
[1] Fink G K, Franke M, Lynch A F, R"obenack K, Godbolt B. Visual inertial SLAM: Application to unmanned aerial vehicle. IFAC-PapersOnline, 2017, 50(1): 1965-1970 doi: 10.1016/j.ifacol.2017.08.162 [2] Höll M, Lepetit V. Monocular LSD-SLAM Integration within AR System, Technical Report ICG-CVARLab-TR-ICGCVARLab-TR003, Inst. for Computer Graphics and Vision, Graz University of Technology, Austria, 2017 http://arxiv.org/abs/1702.02514?context=cs.CV [3] 王楠, 马书根, 李斌, 王明辉, 赵明杨. 震后建筑内部层次化SLAM的地图模型转换方法. 自动化学报, 2015, 41(10): 1723-1733 doi: 10.16383/j.aas.2015.c150125Wang Nan, Ma Shu-Gen, Li Bin, Wang Ming-Hui, Zhao Ming-Yang. A model transformation of map representation for hierarchical SLAM that can be used for after-earthquake buildings. Acta Automatica Sinica, 2015, 41(10): 1723-1733 doi: 10.16383/j.aas.2015.c150125 [4] 赵洋, 刘国良, 田国会, 罗勇, 王梓任, 张威, 李军伟. 基于深度学习的视觉SLAM综述. 机器人, 2017, 39(6): 889-896 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201706015.htmZhao Yang, Liu Guo-Liang, Tian Guo-Hui, Luo Yong, Wang Zi-Ren, Zhang Wei, Li Jun-Wei. A survey of visual SLAM based on deep learning. Robot, 2017, 39(6): 889-896 https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201706015.htm [5] Yi K M, Trulls E, Lepetit V, Fua P. LIFT: Learned invariant feature transform. In: Proceedings of the 14th European Conference on Computer Vision. Amsterdam, Netherlands: 2016. 9910: 467-483 [6] DeTone D, Malisiewicz T, Rabinovich A. Toward geometric deep SLAM. Computer Vision and Pattern Recognition, arXiv preprint arXiv: 1707.07410, 2017 [7] 丁文东, 徐德, 刘希龙, 张大朋, 陈天. 移动机器人视觉里程计综述. 自动化学报, 2018, 44(3): 385-400 doi: 10.16383/j.aas.2018.c170107Ding Wen-Dong, Xu De, Liu Xi-Long, Zhang Da-Peng, Chen Tian. Review on visual odometry for mobile robots. Acta Automatica Sinica, 2018, 44(3): 385-400 doi: 10.16383/j.aas.2018.c170107 [8] Cadena C, Carlone L, Carrillo H, Latif Y, Scaramuzza D, Neira J, Reid I, Leonard J J. Past, present, and future of simultaneous localization and mapping: Towards the robust-perception age. IEEE Transactions on Robotics, 2016, 32(6): 1309-1332 doi: 10.1109/TRO.2016.2624754 [9] Kim J, Kim A. Light condition invariant visual SLAM via entropy based image fusion. In: Proceedings of the 14th International Conference on Ubiquitous Robots and Ambient Intelligence. Jeju, Korea: 2017. 529-533 [10] Davison A J, Reid I D, Molton N D, Stasse O. MonoSLAM: Real-time single camera SLAM. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2007, 29(6): 1052-1067 doi: 10.1109/TPAMI.2007.1049 [11] Klein G, Murray D. Parallel tracking and mapping for small AR workspaces. In: Proceedings of the 6th IEEE and ACM International Symposium on Mixed and Augmented Reality. Nara, Japan: IEEE, 2007. 225-234 [12] Endres F, Hess J, Sturm J, Cremers D, Burgard W. 3D mapping with an RGB-D camera. IEEE Transactions on Robotics, 2014, 30(1): 177-187 doi: 10.1109/TRO.2013.2279412 [13] Mur-Artal R, Montiel J M M, Tard's J D. Orb-SLAM: A versatile and accurate monocular slam system. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163 doi: 10.1109/TRO.2015.2463671 [14] Mur-Artal R, Tard'os J D. ORB-SLAM2: An open-source SLAM system for monocular, stereo and RGB-D cameras. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262 doi: 10.1109/TRO.2017.2705103 [15] Lv Q, Lin H, Wang G, Wei H, Wang Y. ORB-SLAM-based tracing and 3d reconstruction for robot using Kinect 2.0. In: Proceedings of the 29th Chinese Control and Decision Conference. Chongqing, China: 2017. 3319-3324 [16] Newcombe R A, Lovegrove S J, Davison A J. DTAM: dense tracking and mapping in real-time. In: Proceedings of the 2011 IEEE International Conference on Computer Vision. Barcelona, Spain: IEEE, 2011. 2320-2327 [17] Engel J, Sch"ops T, Cremers D. LSD-SLAM: Large-scale direct monocular SLAM. In: Proceedings of the 13th European Conference on Computer Vision. Zurich, Switzerland: Springer, 2014. 834-849 [18] Engel J, Usenko V, Cremers D. Direct sparse odometry. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(3): 611-625 doi: 10.1109/TPAMI.2017.2658577 [19] Forster C, Pizzoli M, Scaramuzza D. SVO: fast semi-direct monocular visual odometry. In: Proceedings of the 2014 IEEE International Conference on Robotics and Automation. Hong Kong, China: IEEE, 2014. 15-22 [20] Shannon C E. A mathematical theory of communication. ACM SIGMOBILE Mobile Computing and Communications Review, 2001, 5(1): 3-55 doi: 10.1145/584091.584093 [21] Farid H. Blind inverse gamma correction. IEEE Transactions on Image Processing, 2001, 10(10): 1428-1433 doi: 10.1109/83.951529 [22] Siebert A. Retrieval of gamma corrected images. Pattern Recognition Letters, 2001, 22(2): 249-256 doi: 10.1016/S0167-8655(00)00107-0 期刊类型引用(9)
1. 曹学伟,袁杰,梁荣光. 基于特征点云配准的SLAM重建深度优化方法. 计算机工程与设计. 2025(03): 657-664 .  百度学术
百度学术2. 翁剑鸿,雷群楼,陶杰,鲁仁全. 基于改进ORB的视觉里程计算法. 控制与决策. 2024(03): 819-826 . 百度学术3. 黄绪勇,林中爱,唐标,赵李强. 基于三维激光点云数据的电力电缆绝缘缺陷识别. 沈阳工业大学学报. 2024(04): 409-415 . 百度学术4. 计志威,刘安东,付明磊,孙虎,张文安,金锦峰,Ryhor Prakapovich,Uladzislau Sychou. 基于运动约束的无监督单目视觉里程计. 传感技术学报. 2024(09): 1545-1554 . 百度学术5. 刘哲,史殿习,杨绍武,李睿豪. 视觉惯性导航系统初始化方法综述. 国防科技大学学报. 2023(02): 15-26 . 百度学术6. 周书华,许四祥,董晨晨,张浩. 基于局部信息熵和梯度漂移的双目视觉测量算法. 激光与光电子学进展. 2023(12): 333-341 . 百度学术7. 刘艳丽,刘圣东,张恒,廖志芳. 基于语义分割不确定性的特征点选择算法. 计算机应用研究. 2022(03): 943-948+955 . 百度学术8. 陈孟元,丁陵梅,张玉坤. 基于改进关键帧选取策略的快速PL-SLAM算法. 电子学报. 2022(03): 608-618 . 百度学术9. 谢波,孙一杰,张国良. 静态与动态场景下视觉里程计定位精度优化方法. 四川轻化工大学学报(自然科学版). 2022(04): 56-65 . 百度学术其他类型引用(16)
-


 下载:
下载:











计量
- 文章访问数: 1324
- HTML全文浏览量: 497
- PDF下载量: 395
- 被引次数: 25
