

Motor Imagery EEG Classification Based on Immune Multi-domain-feature Fusion and Multiple Kernel Learning SVM
-
摘要: 针对多通道四类运动想象(Motor imagery, MI)脑电信号(Electroencephalography, EEG)的分类问题, 提出免疫多域特征融合的多核学习SVM (Support vector machine)运动想象脑电信号分类算法.首先, 通过离散小波变换(Discrete wavelet transform, DWT)提取脑电信号的时频域特征, 并利用一对多公共空间模式(One versus the rest common spatial patterns, OVR-CSP)提取脑电信号的空域特征, 融合时频空域特征形成特征向量.其次, 利用多核学习支持向量机(Multiple kernel learning support vector machine, MKL-SVM)对提取的特征向量进行分类.最后, 利用免疫遗传算法(Immune genetic algorithm, IGA)对模型的相关参数进行优化, 得到识别率更高的脑电信号分类模型.采用BCI2005desc-Ⅲa数据集进行实验验证, 对比结果表明, 本文所提出的分类模型有效地解决了传统单域特征提取算法特征单一、信息描述不足的问题, 更准确地表达了不同受试者个性化的多域特征, 取得了94.21%的识别率, 优于使用相同数据集的其他方法.Abstract: For the classification problem of four kinds of multi-channel motor imagery (MI) EEG, a multi-class motor imagery EEG classification algorithm based on immune multi-domain-feature fusion and multiple kernel learning SVM is proposed. Firstly, discrete wavelet transform (DWT) is used to extract the time-frequency features of EEG signals. The spatial features of EEG are extracted by using one versus the rest common spatial patterns (OVR-CSP). And then time-frequency and spatial features are fused to form one-dimensional feature vector. Secondly, multiple kernel learning support vector machine (MKL-SVM) is used as a classifier to classify the feature vectors. Finally, immune genetic algorithm (IGA) is used to optimize the parameters of MKL-SVM. The experimental results on BCI2005desc-Ⅲa dataset show that the classification model proposed in this paper not only effectively overcomes the shortcomings that is the traditional single-domain feature extraction algorithm is lack of information description, but also more accurately expresses the multi-domain characteristics of different subjects. It achieves a recognition rate of 94.21%, which is better than other methods of using the same data set.
-
Key words:
- Discrete wavelet transform /
- common spatial patterns /
- multiple kernel learning support vector machine /
- immune genetic algorithm /
- motor imagery /
- electroencephalography
1) 本文责任编委 董峰 -
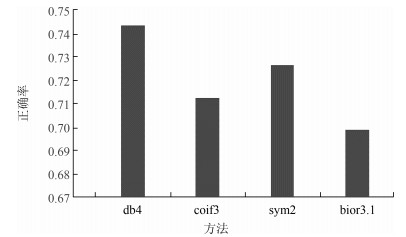
图 1 不同小波函数的SVM分类正确率
Fig. 1 Classification accuracies of different wavelets using the SVM classifier

图 2 不同种类核函数MKL-SVM分类正确率
Fig. 2 Classification accuracy of different kinds of kernel functions MKL-SVM

图 3 不同基核个数的训练耗时对比
Fig. 3 Training time-consuming obtained by different number of kernel
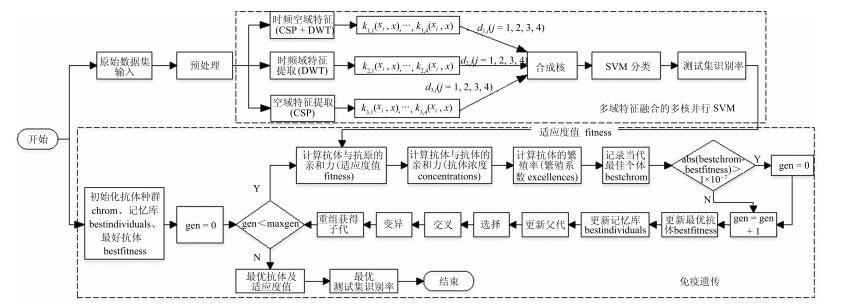
图 4 免疫多域特征融合的多核学习SVM运动想象脑电信号分类算法流程图
Fig. 4 Flow chart of multi-class motion imaging EEG classification based on immune multi-domain-feature fusion and multiple kernel learning SVM

图 8 不同数量的训练集分类正确率
Fig. 8 Classification accuracy of different numbers of training sets
表 1 DWT分解250 Hz采样频率所对应各层的频率
Table 1 Frequencies corresponding to different levels of DWT decomposition with a 250 Hz sampling rate
分解信号 频率范围(Hz) A1 0$\sim$62.5 D1 62.5$\sim$125 D2 31.25$\sim$62.5 D3 15.625$\sim$31.25 D4 7.8125$\sim$15.625  下载: 导出CSV
下载: 导出CSV
表 2 免疫遗传算法参数设置
Table 2 IGA parameter settings
参数 说明 参数 说明 参数 说明 编码方式 二进制编码 选择 轮盘赌选择 适应度值偏差 $1\times 10^{-7}$ 初始种群 随机产生0、1矩阵 交叉 低位交叉, 交叉率0.9 种群多样性参数 $ps=0.95$ 种群大小 30 变异 高位变异, 变异率0.1 抗体浓度阈值 $ t=0.6 $ 记忆库大小 10 停止方式 停止代数和适应度偏差 适应度 测试集识别率 个体大小 151 停止代数 20
下载: 导出CSV
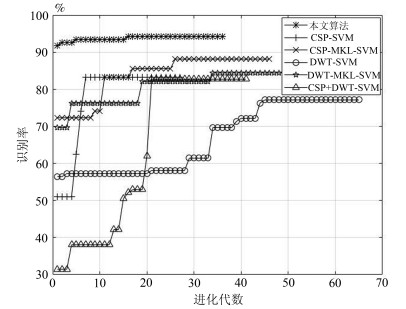
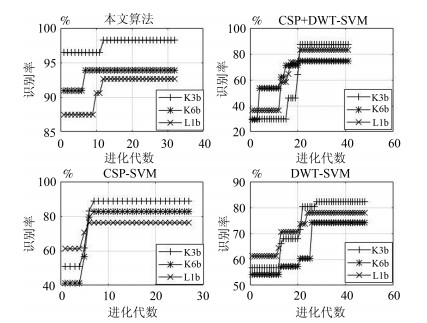
表 3 四种算法识别率对比
Table 3 Recognition rate comparison of four algorithms
方法 识别率(%) K3b K6b L1b 三者 本文方法 98.21 93.91 92.63 94.21 CSP-SVM 88.71 82.55 76.13 83.21 DWT-SVM 82.21 74.24 78.00 77.11 CSP+DWT-SVM 87.14 74.70 83.13 82.69
下载: 导出CSV
表 4 四种算法下K3b受试者识别率对比
Table 4 Recognition rate comparison of four algorithms for K3b
方法 识别率(%) 1 2 3 平均 本文方法 92.36 94.44 93.06 93.29 CSP-SVM 81.94 83.33 82.64 82.64 DWT-SVM 78.47 79.86 79.17 79.17 CSP+DWT-SVM 80.56 81.94 79.86 80.79
下载: 导出CSV
-
[1] Wang X Y, Jin J, Zhang Y, et al. Brain control: human-computer integration control based on brain-computer interface approach. Acta Automatica Sinica, 2013, 39(3): 208-221 http://www.sciencedirect.com/science/article/pii/S1874102913600233 [2] 王行愚, 金晶, 张宇, 等.脑控:基于脑-机接口的人机融合控制.自动化学报, 2013, 39(3): 208-221 doi: 10.3724/SP.J.1004.2013.00208Wang Xing-Yu, Jin Jing, Zhang Yu, et al. Brain control: human-computer integration control based on brain-computer interface approach. Acta Automatica Sinica, 2013, 39(3): 208-221 doi: 10.3724/SP.J.1004.2013.00208 [3] Zeng H, Song A, Yan R, et al. EOG artifact correction from EEG recording using stationary subspace analysis and empirical mode decomposition. Sensors, 2013, 13(11): 14839-14859 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=sensors-13-14839 [4] Nicolas-Alonso L F, Corralejo R, Gomez-Pilar J, et al. Adaptive semi-supervised classification to reduce intersession non-stationarity in multiclass motor imagery-based brain-computer interfaces. Neurocomputing, 2015, 159(C): 186-196 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=df6f82b648cd42eba72270dea70a5097 [5] Li M, Lin L, Jia S. Multi-class imagery EEG recognition based on adaptive subject-based feature extraction and SVM-BP classifier. In: Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation. Beijing, China: IEEE, 2011. 1184-1189 [6] Wang H. Optimizing spatial filters for single-trial EEG classification via a discrimin-ant extension to CSP: The Fisher crit-erion. Medical & Biological Engineering & Computing, 2011, 49(9): 997-1001 http://europepmc.org/abstract/MED/21437733 [7] Berta R, Bellotti F, Gloria A D, et al. Electroencephalogram and physiological signal analysis for assessing flow in games. Computational Intelligence & AI in Games, 2013, 5(2): 164-175 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=4c6c19c1cdf9e7875dbbd5202d828662 [8] Sun H, Xiang Y, Sun Y, et al. On-line EEG classification for brain-computer interface based on CSP and SVM. In: Proceedings of the 2010 International Congress on Image and Signal Processing. IEEE, 2010. 4105-4108 [9] Kevric J, Subasi A. Comparison of signal decomposition methods in classification of EEG signals for motor-imagery BCI system. Biomedical Signal Processing & Control, 2017, 31: 398-406 http://www.sciencedirect.com/science/article/pii/S1746809416301331 [10] 陈魁. CSP算法在多任务下的扩展及在脑-机接口中的应用[博士论文].南昌大学, 中国, 2010Chen Kui. The Extended CSP Algorithm in Multi-task and in BCI Application[Ph. D dissertation], Nanchang University, China, 2010 [11] 李德强, 吴永国, 罗海波.基于冗余离散小波变换的信号配准及分类.自动化学报, 2011, 37(1): 61-66 doi: 10.3724/SP.J.1004.2011.00061Li De-Qiang, Wu Yong-Guo, Luo Hai-Bo. Redundant DWT based signal registration and classification. Acta Automatica Sinica, 2011, 37(1): 61-66 doi: 10.3724/SP.J.1004.2011.00061 [12] 杨默涵, 陈万忠, 李明阳.基于总体经验模态分解的多类特征的运动想象脑电识别方法研究.自动化学报, 2017, 43(5): 743-752 doi: 10.16383/j.aas.2017.c160175Yang Mo-Han, Chen Wan-Zhong, Li Ming-Yang. Multiple feature extraction based on ensemble empirical mode decomposition for motor imagery EEG recognition tasks. Acta Automatica Sinica, 2017, 43(5): 743-752 doi: 10.16383/j.aas.2017.c160175 [13] 孟明, 朱俊青, 佘青山, 马玉良, 罗志增.多类运动想象脑电信号的两级特征提取方法.自动化学报, 2016, 42(12): 1915-1922 doi: 10.16383/j.aas.2016.c160122Meng Ming, Zhu Jun-Qing, She Qing-Shan, Ma Yu-Liang, Luo Zhi-Zeng. Two-level feature extraction method for multi-class motor imagery EEG. Acta Automatica Sinica, 2016, 42(12): 1915-1922 doi: 10.16383/j.aas.2016.c160122 [14] Rakotomamonjy A, Bach F R, Canu S, et al. Simplemkl. Journal of Machine Learning Research, 2008, 9(3): 2491-2521 http://www.ams.org/mathscinet-getitem?mr=2460891 [15] 郝矿荣, 原博炜, 陈磊, 丁永生.基于免疫堆叠降噪自编码机网络的运动想象脑电信号识别.控制与决策, 2018, 33(4): 719-723 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201804019Hao Kuang-Rong, Yuan Bo-Wei, Chen Lei, Ding Yong-Sheng. Recognition of motor imagery EEG based on immune stacked denoising auto-encoders network. Control and Decision, 2018, 33(4): 719-723 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201804019 [16] Schlogl A, Lee F, Bischof H, et al. Char-acterization of four-class motor imagery EEG data for the BCI-competition 2005. Journal of Neural Engineering, 2005, 2(4): L14 http://europepmc.org/abstract/MED/16317224 [17] 曾庆山, 范明莉, 宋庆祥.基于CSP与卷积神经网络算法的多类运动想象脑电信号分类.科学技术与工程, 2017, (27): 144-149 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kxjsygc201727023Zeng Qing-Shan, Fan Ming-Li, Song Qing-Xiang. Multi -- Kinematics Imaging EEG Signal Classification Based on CSP and Convolutional Neural Network. Science Technology and Enginee-ring, 2017, (27): 144-149 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kxjsygc201727023 [18] Li M, Zhang M, Luo X, et al. Combined long short-term memory based network employing wavelet coefficients for MI-EEG recognition. In: Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation. IEEE, 2016. 1971-1976 [19] 张焕, 乔晓艳.多任务运动想象脑电特征的融合分类研究.传感技术学报, 2016, 29(6): 802-807 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cgjsxb201606003Zhang Huan, Qiao Xiao-Yan. Study on the classification of EEG characteristics of multi task motor imagery. Journal of Sensor Technology, 2016, 29(6): 802-807 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cgjsxb201606003 [20] Dornhege G, Blankertz B, Curio G, Muller K R. Boosting bit rates in non-invasive EEG single-trial classifications by feature combination and multi-class paradigms. IEEE Transactions on Biomedical Engineering, 51(6): 993-1002 http://www.ncbi.nlm.nih.gov/pubmed/15188870?dopt=AbstractPlus [21] Li Y Q, Long J Y, Yu J Y, et al. An EEG-based BCI system for 2-D cursor control by combining Mu/Beta rhythm and P300 potential. IEEE Transactions on Biomedical Engineering, 2010, 57(10): 2495-2505 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=9e4e42a15887929d0811bc93fbfb7b64 [22] Brunner C, Allison B Z, Krusienski D J, et al. Improved signal processing approaches in an offline simulation of a hybrid brain-computer interface. Journal of Neuroscience Methods, 2010, 188(1): 165 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=53edfb1850872e410a69ebd3ff255598 -

 下载:
下载:


计量
- 文章访问数: 2376
- HTML全文浏览量: 397
- PDF下载量: 216
- 被引次数: 0
