

-
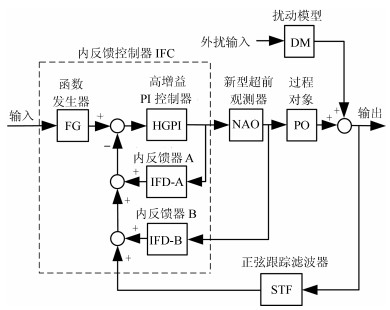
摘要: 鉴于在控制实际中存在的不确定性问题, 提出了一种针对大滞后过程的不确定性抑制的新型高性能控制器(New higher performance controller, NHPC).基于在新型观测方法和新型控制方法包括新型滤波方法上的良好进展, 将一种新型超前观测器(New advanced observer, NAO)、一种内反馈控制器(Internal feedback controller, IFC)包括一种正弦跟踪滤波器(Sinusoid tracking filter, STF)等用于构造NHPC.将NHPC运用于大滞后过程控制, 能够对较宽的范围内的时变性和非线性等不确定性问题进行较好的抑制.数学分析、仿真实验和实际电力控制工程应用的结果验证了本文所提观点和方法的正确性和有效性.Abstract: As the uncertainty in automatic control, a new higher performance controller (NHPC) of uncertainty suppression for large-lag process is proposed. Based on good progress in new observation methods and new control methods as well as new filtering methods, a new advanced observer (NAO) and a internal feedback controller (IFC) as well as a sinusoidal tracking filter (STF), etc. are used to construct NHPC. NHPC which can effectively suppress the time variability and nonlinear uncertainty in a wider range is used to large-lag process control. The mathematical analysis, simulation experiments and actual power engineering application results verify the correctness and effectiveness of the proposed ideas and methods in this paper.
-
Key words:
- Process control /
- proportional-integral-derivative (PID) controller /
- sinusoid tracking filter (STF) /
- internal feedback controller (IFC) /
- new advanced observer (NAO) /
- new high performance controller (NHPC)
1) 本文责任编委 乔俊飞 -

图 1 二阶惯性滤波器内部结构示意图
Fig. 1 The inside structure diagram of second order inertial filter
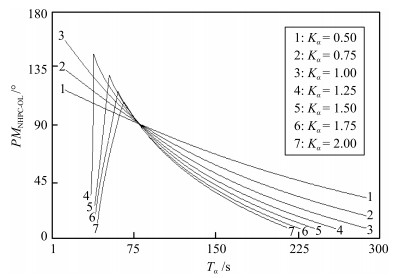
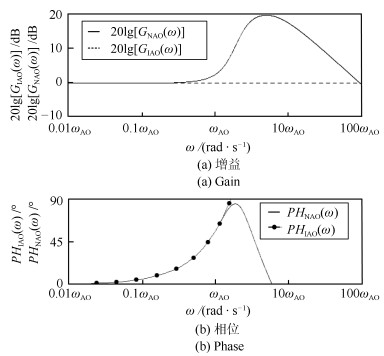
图 6 NHPC开环系统相位稳定裕度
Fig. 6 The diagram of open loop system phase stability margin of NHPC

图 7 PID开环系统相位稳定裕度
Fig. 7 The diagram of open loop system phase stability margin of PID
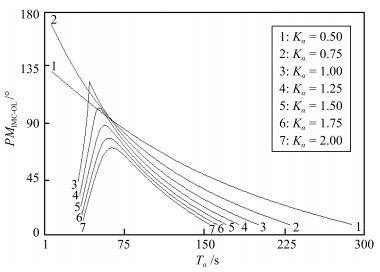
图 9 IMC开环系统相位稳定裕度
Fig. 9 The diagram of open loop system phase stability margin of IMC
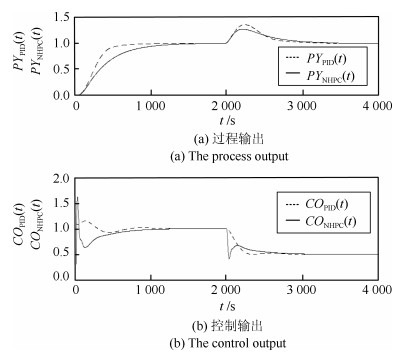
图 10 控制特性仿真实验结果(意图 1)
Fig. 10 The results of control characteristic simulation (NO. 1)
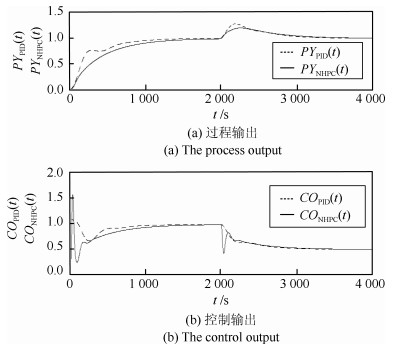
图 11 控制特性仿真实验结果(意图 2)
Fig. 11 The results of control characteristic simulation (NO. 2)
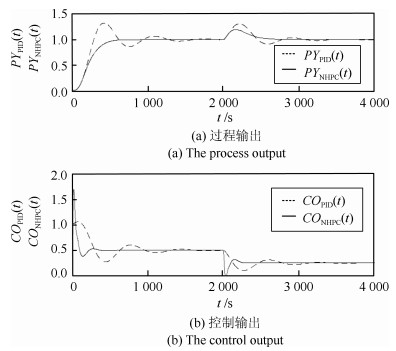
图 12 控制特性仿真实验结果(意图 3)
Fig. 12 The results of control characteristic simulation (NO. 3)

图 13 控制特性仿真实验结果(意图 4)
Fig. 13 The results of control characteristic simulation (NO. 4)
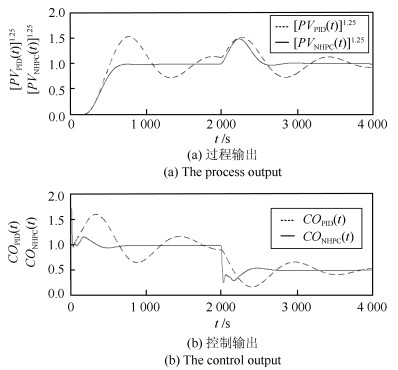
图 14 控制特性仿真实验结果(意图 5)
Fig. 14 The results of control characteristic simulation (NO. 5)

图 15 控制特性仿真实验结果(意图 6)
Fig. 15 The results of control characteristic simulation (NO. 6)

图 16 控制特性仿真实验结果(意图 7)
Fig. 16 The results of control characteristic simulation (NO. 7)

图 17 控制特性仿真实验结果(意图 8)
Fig. 17 The results of control characteristic simulation (NO. 8)

图 18 控制特性仿真实验结果(意图 9)
Fig. 18 The results of control characteristic simulation (NO. 9)
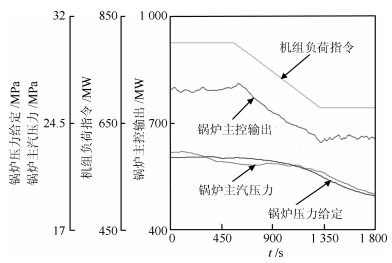
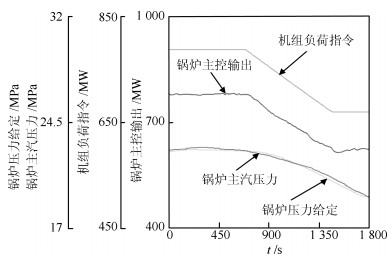
图 19 优化前锅炉主控系统控制特性示意图
Fig. 19 The control properties of boiler master control system before optimization
-
[1] 柴天佑.复杂工业过程运行优化与反馈控制.自动化学报, 2013, 39(11): 1744-1757 doi: 10.3724/SP.J.1004.2013.01744Chai Tian-You. Operational optimization and feedback control for complex industrial processes. Acta Automatica Sinica, 2013, 39(11): 1744-1757 doi: 10.3724/SP.J.1004.2013.01744 [2] 高志强.自抗扰控制思想探究.控制理论与应用, 2013, 30(12): 1498-1510 doi: 10.7641/CTA.2013.31087Gao Zhi-Qiang. On the foundation of active disturbance rejection control. Control Theory and Applications, 2013, 30(12): 1498-1510 doi: 10.7641/CTA.2013.31087 [3] Minorsky N. Directional stability and automatically steered bodies. Journal of the American Society of Naval Engineers, 1922, 42(2): 280-309 http://ci.nii.ac.jp/naid/10003428066/ [4] 王维洲, 吴志伟, 柴天佑.电熔镁砂熔炼过程带输出补偿的PID控制.自动化学报, 2018, 44(7): 1282-1292 doi: 10.16383/j.aas.2018.c170620Wang Wei-Zhou, Wu Zhi-Wei, Chai Tian-You. PID control with output compensation for the fused magnesia smelting process. Acta Automatica Sinica, 2018, 44(7): 1282-1292 doi: 10.16383/j.aas.2018.c170620 [5] 张冬丽, 唐英干, 关新平.用改进的人工蜂群算法设计AVR系统最优分数阶PID控制器.自动化学报, 2014, 40(5): 973-979 doi: 10.3724/SP.J.1004.2014.00973Zhang Dong-Li, Tang Ying-Gan, Guan Xin-Ping. Optimum design of fractional order PID controller for an AVR system using an improved artificial bee colony algorithm. Acta Automatica Sinica, 2014, 40(5): 973-979 doi: 10.3724/SP.J.1004.2014.00973 [6] 赵建华, 沈永良.一种自适应PID控制算法.自动化学报, 2001, 27(03): 417-420 http://www.aas.net.cn/article/id/16426Zhao Jian-Hua, Shen Yong-Liang. An adaptive PID control algorithm. Acta Automatica Sinica, 2001, 27(03): 417-420 http://www.aas.net.cn/article/id/16426 [7] 胡包钢, 应浩.模糊PID控制技术研究发展回顾及其面临的若干重要问题.自动化学报, 2001, 27(04): 567-584 http://www.aas.net.cn/article/id/16439Hu Bao-Gang, Ying Hao. Review of fuzzy PID control techniques and some important issues. Acta Automatica Sinica, 2001, 27(04): 567-584 http://www.aas.net.cn/article/id/16439 [8] 韩京清.非线性PID控制器.自动化学报, 1994, 20(04): 487-490 http://www.aas.net.cn/article/id/14059Han Jing-Qing. Nonlinear PID controller. Acta Automatica Sinica, 1994, 20(04): 487-490 http://www.aas.net.cn/article/id/14059 [9] 罗传翼, 程桂芬, 付家才.控制工程与信号处理.北京:化学工业出版社, 2004.Luo Chuan-Yi, Cheng Gui-Fen, Fu Jia-Cai. Control engineering and signal processing. Beijing: ChemistryIndustry Press, 2004. [10] 黄德先, 江永亨, 金以慧.炼油工业过程控制的研究现状、问题与展望.自动化学报, 2017, 43(6): 902-916 doi: 10.16383/j.aas.2017.c170157Huang De-Xian, Jiang Yong-Heng, Jin Yi-Hui. Present research situation, major bottlenecks, and prospect of refinery industry process control. Acta Automatica Sinica, 2017, 43(6): 902-916 doi: 10.16383/j.aas.2017.c170157 [11] Kalman R E. On the general theory of control systems. Ire Transactions on Automatic Control, 1959, 4(3): 110-110 doi: 10.1109/TAC.1959.1104873 [12] Kalman R E. Canonical structure of linear dynamical systems. Proceedings of the National Academy of Sciences of the United States of America, 1962, 48(4): 596-600 doi: 10.1073/pnas.48.4.596 [13] 胡品慧, 袁璞.状态反馈预测控制系统的鲁棒稳定性.控制与决策, 2001, 16(1): 126-128 doi: 10.3321/j.issn:1001-0920.2001.01.034Hu Pin-Hui, Yuan Pu. Robustness of state feedback predictive control systems. Control and Decision, 2001, 16(1): 126 -128 doi: 10.3321/j.issn:1001-0920.2001.01.034 [14] 许锋, 魏小丽, 任丽红, 罗雄麟.基于多变量广义预测控制的不稳定系统控制结构选择方法.自动化学报, 2013, 39(9): 1547-1551 doi: 10.3724/SP.J.1004.2013.01547Xu Feng, Wei Xiao-Li, Ren Li-Hong, Luo Xiong-Lin. A control structure selection method based on multivariable generalized predictive control for unstable processes. Acta Automatica Sinica, 2013, 39(9): 1547-1551 doi: 10.3724/SP.J.1004.2013.01547 [15] 尹良震, 李奇, 洪志湖, 韩莹, 陈维荣. PEMFC发电系统FFRLS在线辨识和实时最优温度广义预测控制方法.中国电机工程学报, 2017, 37(11): 3223-3235 http://www.cqvip.com/QK/90021X/201711/672271672.htmlYin Liang-Zhen, Li Qi, Hong Zhi-Hu, Han Ying, Chen Wei-Rong. FFRLS online identification and real-time optimal temperature generalized predictive control method of PEMFC power generation system. Proceedings of the CSEE, 2017, 37(11): 3223-3235 http://www.cqvip.com/QK/90021X/201711/672271672.html [16] 司文杰, 董训德, 王聪.输入饱和的一类切换系统神经网络跟踪控制.自动化学报, 2017, 43(8): 1383-1392 doi: 10.16383/j.aas.2017.c160372Si Wen-Jie, Dong Xun-De, Wang Cong. Adaptive neural tracking control design for a class of uncertain switched nonlinear systems with input saturation. Acta Automatica Sinica, 2017, 43(8): 1383-1392 doi: 10.16383/j.aas.2017.c160372 [17] 朱宇轩, 李少远.双层模型预测控制系统的多包镇定域分析与系统设计.自动化学报, 2018, 44(2): 262-269 doi: 10.16383/j.aas.2018.c160394Zhu Yu-Xuan, Li Shao-Yuan. Analysis and system design of multi-convex hull stabilization domain for double-layered model predictive control system. Acta Automatica Sinica, 2018, 44(2): 262-269 doi: 10.16383/j.aas.2018.c160394 [18] 谢澜涛, 谢磊, 苏宏业.不确定系统的鲁棒与随机模型预测控制算法比较研究.自动化学报, 2017, 43(6): 969-992 doi: 10.16383/j.aas.2017.c170082Xie Lan-Tao, Xie Lei, Su Hong-Ye. A comparative study on algorithms of robust and stochastic MPC for uncertain systems. Acta Automatica Sinica, 2017, 43(6): 969-992 doi: 10.16383/j.aas.2017.c170082 [19] 刘向杰, 孔小兵.电力工业复杂系统模型预测控制—现状与发展.中国电机工程学报, 2013, 33(5): 79-85 http://d.wanfangdata.com.cn/Periodical/zgdjgcxb201305012Liu Xiang-Jie, Kong Xiao-Bing. Present situation and prospect of model predictive control application in complex power industrial process. Proceedings of the CSEE, 2013, 33(5): 79-85 http://d.wanfangdata.com.cn/Periodical/zgdjgcxb201305012 [20] 席裕庚, 李德伟, 林姝.模型预测控制—现状与挑战.自动化学报, 2013, 39(3): 222-236 doi: 10.3724/SP.J.1004.2013.00222Xi Yu-Geng, Li De-Wei, Lin Shu. Model predictive control—status and challenges. Acta Automatica Sinica, 2013, 39(3): 222-236 doi: 10.3724/SP.J.1004.2013.00222 [21] 李世卿, 丁宝苍.基于动态矩阵控制的双层结构预测控制的整体解决方案.自动化学报, 2015, 41(11): 1857-1866 doi: 10.16383/j.aas.2015.c150126Li Shi-Qing, Ding Bao-Cang. An overall solution to double-layered model predictive control based on dynamic matrix control. Acta Automatica Sinica, 2015, 41(11): 1857-1866 doi: 10.16383/j.aas.2015.c150126 [22] Eykhoff P. System Identification: Parameter and State Es-timation. Chichester, England: Wiley, 1974. [23] 鲁兴举, 郑志强.一类MIMO系统连续状态空间模型的参数辨识频域方法.自动化学报, 2016, 42(1): 145-153 doi: 10.16383/j.aas.2016.c150150Lu Xing-Ju, Zheng Zhi-Qiang. Identification of continuous state-space model parameters for a class of mimo systems: a frequency domain approach. Control Theory and Applications, 2016, 42(1): 145-153 doi: 10.16383/j.aas.2016.c150150 [24] 侯杰, 刘涛.基于新息估计和正交投影的闭环子空间模型辨识.自动化学报, 2016, 42(11): 1657-1663 doi: 10.16383/j.aas.2016.c160050Hou Jie, Liu Tao. Closed-loop subspace model identification using innovation estimation and orthogonal projection. Control Theory and Applications, 2016, 42(11): 1657-1663 doi: 10.16383/j.aas.2016.c160050 [25] 潘天红, 李少远.基于模糊聚类的PWA系统的模型辨识.自动化学报, 2007, 33(3): 327-330 doi: 10.1360/aas-007-0327Pan Tian-Hong, Li Shao-Yuan. Model identification of piecewise affine (PWA) systems based on fuzzy cluster. Acta Automatica Sinica, 2007, 33(3): 327-330 doi: 10.1360/aas-007-0327 [26] 李军, 万文军, 刘志刚, 陈世和, 张曦.一种基于时域响应的控制系统频率特性分析方法.中国电机工程学报, 2012, 32(29): 116-122 http://qikan.cqvip.com/Qikan/Article/Detail?id=43552907Li Jun, Wan Wen-Jun, Liu Zhi-Gang, Chen Shi-He, Zhang Xi. A method of frequency domain analysis for control system based on process response in time domain. Proceedings of the CSEE, 2012, 32(29): 116-122 http://qikan.cqvip.com/Qikan/Article/Detail?id=43552907 [27] 刘小斌.基于BP神经网络PID参数整定的空燃比控制策略研究.兰州工业学院学报, 2013, 20(6): 7-11 doi: 10.3969/j.issn.1009-2269.2013.06.002Liu Xiao-Bin. Study on the control strategy of air-fuel ratio of network PID parameter tuning based on BP neural. Journal of Lanzhou Higher Polytechnical College, 2013, 20(6): 7-11 doi: 10.3969/j.issn.1009-2269.2013.06.002 [28] 杨智, 陈颖.改进粒子群算法及其在PID整定中的应用.控制工程, 2016, 23(2): 161-166 http://www.cqvip.com/QK/98133A/20162/667904229.htmlYang Zhi, Chen Ying. Improved particle swarm optimization and its application in PID tuning. Control Engineering of China, 2016, 23(2): 161-166 http://www.cqvip.com/QK/98133A/20162/667904229.html [29] 徐传敬, 赵敏, 李天明.一种改进遗传算法的PID参数整定研究.计算机技术与发展, 2016, 26(9): 12-15 http://www.cqvip.com/QK/97969A/20169/669935643.htmlXu Chuan-Jing, Zhao Min, LI Tian-Ming. Research on PID parameter genetic tuning based on an improved algorithm. Computer Technology and Development, 2016, 26(9): 12-15 http://www.cqvip.com/QK/97969A/20169/669935643.html [30] 齐朝阳, 郑恩让, 侯再恩.迭代模型Smith预估控制:算法和稳定性.控制工程, 2015, 22(1): 133-138 http://www.cnki.com.cn/Article/CJFDTotal-JZDF201501025.htmQi Zhao-Yang, Zheng En-Rang, Hou Zai-En. Iterative model smith predictive control:algorithm and stability. Control Engineering of China, 2015, 22(1): 133-138 http://www.cnki.com.cn/Article/CJFDTotal-JZDF201501025.htm [31] 张宁.基于自适应Smith预估算法的再热蒸汽温度控制策略.热力发电, 2013, 42(4): 98-101 doi: 10.3969/j.issn.1002-3364.2013.04.098Zhang Ning. Self-adaptive Smith prediction algorithm based control strategy for reheat steam temperature. Thermal Power Generation, 2013, 42(4): 98-101 doi: 10.3969/j.issn.1002-3364.2013.04.098 [32] 王正齐, 刘贤兴.基于神经网络逆系统的无轴承异步电机非线性内模控制.自动化学报, 2013, 39(4): 433-439 doi: 10.3724/SP.J.1004.2013.00433Wang Zheng-Qi, Liu Xian-Xing. Nonlinear internal model control for bearingless induction motor based on neural network inversion. Acta Automatica Sinica, 2013, 39(4): 433-439 doi: 10.3724/SP.J.1004.2013.00433 [33] 黄宇, 韩璞, 李永玲.主汽温系统模糊自适应内模控制.中国电机工程学报, 2008, 28(23): 93-98 http://www.cnki.com.cn/Article/CJFDTotal-ZGDC200823018.htmHuang Yu, Han Pu, Li Yong-Ling. Fuzzy adaptive internal model control in main steam temperature system. Proceedings of the CSEE, 2008, 28(23): 93-98 http://www.cnki.com.cn/Article/CJFDTotal-ZGDC200823018.htm [34] 蔡改贫, 许琴, 曾艳祥, 杨丽荣.预磨机磨矿系统的IMC-PID串联解耦控制.北京工业大学学报, 2016, 42(1): 35-41 http://www.cqvip.com/QK/95054X/20161/667678318.htmlCai Gai-Pin, Xu Qin, Zeng Yan-Xiang, Yang Li-Rong. IMC-PID series decoupling control of the pre-mill grinding system. Journal of Beijing Polytechnic University, 2016, 42(1): 35-41 http://www.cqvip.com/QK/95054X/20161/667678318.html [35] 黄攀峰, 胡永新, 王东科, 孟中杰, 刘正雄.空间绳系机器人目标抓捕鲁棒自适应控制器设计.自动化学报, 2017, 43(4): 538-547 doi: 10.16383/j.aas.2017.c150602Huang Pan-Feng, Hu Yong-Xin, Wang Dong-Ke, Meng Zhong-Jie, Liu Zheng-Xiong. Capturing the target for a tethered space robot using robust adaptive controller. Acta Automatica Sinica, 2017, 43(4): 538-547 doi: 10.16383/j.aas.2017.c150602 [36] 陈光荣, 王军政, 汪首坤, 赵江波, 沈伟, 李静.自适应鲁棒控制器设计新方法在电液伺服系统中的应用.自动化学报, 2016, 42(3): 375-384 doi: 10.16383/j.aas.2016.c150473Chen Guang-Rong, Wang Jun-Zheng, Wang Shou-Kun, Zhao Jiang-Bo, Shen Wei, Li Jing. Application of a new adaptive robust controller design method to electro-hydraulic servo system. Acta Automatica Sinica, 2016, 42(3): 375-384 doi: 10.16383/j.aas.2016.c150473 [37] 刘斌, 孙久强, 翟志强, 李卓, 王常虹.一种改进的同伦算法与$H_{\infty}$鲁棒控制器设计.自动化学报, 2013, 39(8): 1374-1380 http://d.wanfangdata.com.cn/Periodical/zdhxb201308022Liu Bin, Sun Jiu-Qiang, Zhai Zhi-Qiang, Li Zhuo, Wang Chang-Hong. A modified homotopy method and $H_{\infty}$ robust controller design. Acta Automatica Sinica, 2013, 39(8): 1374-1380 http://d.wanfangdata.com.cn/Periodical/zdhxb201308022 [38] 刘希, 孙秀霞, 董文瀚, 杨朋松.一种新的约束变速趋近律离散滑模控制方法.自动化学报, 2013, 39(9): 1552-1557 doi: 10.3724/SP.J.1004.2013.01552Liu Xi, Sun Xiu-Xia, Dong Wen-Han, Yang Peng-Song. A new discrete-time sliding mode control method based on restricted variable trending law. Acta Automatica Sinica, 2013, 39(9): 1552-1557 doi: 10.3724/SP.J.1004.2013.01552 [39] 韩京清.控制理论—模型论还是控制论.系统科学与数学, 1989, 9(4): 328-335 http://www.cqvip.com/QK/95649X/19894/162139.htmlHan Jing-Qing. Control theory, is it a model analysis approach or a direct control approach? Journal of Systems Science and Mathematical Sciences, 1989, 9(4): 328-335 http://www.cqvip.com/QK/95649X/19894/162139.html [40] 王建宏.内模控制中的虚拟参考反馈校正设计.系统科学与数学, 2017, 37(2): 355-369 http://www.cnki.com.cn/Article/CJFDTotal-STYS201702005.htmWang Jian-Hong. Virtual reference feedback tuning design in internal model control. Journal of Systems Science and Mathematical Sciences, 2017, 37(2): 355-369 http://www.cnki.com.cn/Article/CJFDTotal-STYS201702005.htm [41] 邹涛, 王丁丁, 丁宝苍, 于海斌.积分过程预测控制的稳态分析及反馈校正.控制理论与应用, 2014, 31(2): 165-174 http://d.wanfangdata.com.cn/Periodical/kzllyyy201402005Zou Tao, Wang Ding-Ding, Ding Bao-Cang, Yu Hai-Bin. Steady-state analysis and feedback correction of model predictive control for integrating process. Control Theory and Applications, 2014, 31(2): 165-174 http://d.wanfangdata.com.cn/Periodical/kzllyyy201402005 [42] 韩京清.自抗扰控制技术:估计补偿不确定因素的控制技术.北京:国防工业出版社, 2008.Han Jing-Qing. Active Disturbance Rejection Control: the Technique for Estimating and Compensating the Uncertain-ties. Beijing: National Denfence Industry Press, 2008. [43] 孙立, 董君伊, 李东海, 薛亚丽.基于扩张状态观测器的汽轮机功频电液串级控制.中国电机工程学报, 2015, 35(7): 1697-1703 http://www.cqvip.com/QK/90021X/20157/664192326.htmlSun Li, Dong Jun-Yi, Li Dong-Hai, Xue Ya-Li. Cascaded load-frequency digital electric-hydraulic regulation of turbine via extended state observer. Proceedings of the CSEE, 2015, 35(7): 1697-1703 http://www.cqvip.com/QK/90021X/20157/664192326.html [44] Zheng Q, Gao L Q, Gao Z Q. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknow dynamics. In: Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, LA, USA: IEEE, 2007. 3501-3506 [45] 袁东, 马晓军, 曾庆含, 邱晓波.基二阶系统线性自抗扰控制器频带特性与参数配置研究.控制理论与应用, 2013, 30(12): 1630-1640 doi: 10.7641/CTA.2013.30424Yuan Dong, Ma Xiao-Jun, Zeng Qing-Han, Qiu Xiao-Bo. Research on frequency-band characteristics and parameters configuration of linear active disturbance rejection control for second-order systems. Control Theory and Applications, 2013, 30(12): 1630-1640 doi: 10.7641/CTA.2013.30424 [46] 刘善慧, 梅雪松, 何奎, 李健.凹印机多色套准系统自抗扰解耦控制.控制理论与应用, 2014, 31(11): 1574-1579 doi: 10.7641/CTA.2014.30825Liu Shan-Hui, Mei Xue-Song, He Kui, Li Jian. Active disturbance rejection decoupling control for multi-color register system in gravure printing machine. Control Theory and Applications, 2014, 31(11): 1574-1579 doi: 10.7641/CTA.2014.30825 [47] 陈增强, 孙明玮, 杨瑞光.线性自抗扰控制器的稳定性研究.自动化学报, 2013, 39(5): 574-580 doi: 10.3724/SP.J.1004.2013.00574Chen Zeng-Qiang, Sun Ming-Wei, Yang Rui-Guang. On the stability of linear active disturbance rejection control. Acta Automatica Sinica, 2013, 39(5): 574-580 doi: 10.3724/SP.J.1004.2013.00574 [48] 李向阳, 哀薇, 田森平.惯性串联系统的自抗扰控制.自动化学报, 2018, 44(3): 562-568 doi: 10.16383/j.aas.2018.c160568Li Xiang-Yang, Ai Wei, Tian Sen-Ping. Active disturbance rejection control of cascade inertia systems. Acta Automatica Sinica, 2018, 44(3): 562-568 doi: 10.16383/j.aas.2018.c160568 [49] 李杰, 齐晓慧, 夏元清, 高志强.线性/非线性自抗扰切换控制方法研究.自动化学报, 2016, 42(2): 202-212 doi: 10.16383/j.aas.2016.c150338Li Jie, Qi Xiao-Hui, Xia Yuan-Qing, Gao Zhi-Qiang. On linear/nonlinear active disturbance rejection switching control. Acta Automatica Sinica, 2016, 42(2): 202-212 doi: 10.16383/j.aas.2016.c150338 [50] 竹瑞博, 董泽, 冉宁.自抗扰控制在火电厂主蒸汽温度控制中的应用.电力科学与工程, 2012, 28(5): 46-49 doi: 10.3969/j.issn.1672-0792.2012.05.010Zhu Rui-Bo, Dong Ze, Ran Ning. Application of active disturbance rejection control in main steam temperature control of thermal power plant. Power Science and Engineering, 2012, 28(5): 46-49 doi: 10.3969/j.issn.1672-0792.2012.05.010 [51] 楼冠男, 谭文, 郑勤玲.汽包锅炉单元机组协调系统的线性自抗扰控制.中国电机工程学报, 2011, 31(23): 94-100 http://www.cnki.com.cn/Article/CJFDTotal-ZGDC201123014.htmLou Guan-Nan, Tan Wen, Zheng Qin-Ling. Linear active disturbance rejection control for the coordinated system of drum boiler-turbine units. Proceedings of the CSEE, 2011, 31(23): 94-100 http://www.cnki.com.cn/Article/CJFDTotal-ZGDC201123014.htm [52] 刘希, 孙秀霞, 郝震, 刘宇坤.最速跟踪微分器的一种新型离散形式.信息与控制, 2013, 42(6): 729-734 http://www.cqvip.com/QK/93243X/201306/48330018.htmlLiu Xi, Sun Xiu-Xia, Hao Zhen, Liu Yu-Kun. A new discrete-time form of optimal tracking differentiator. Information and control, 2013, 42(6): 729-734 http://www.cqvip.com/QK/93243X/201306/48330018.html [53] Guo B Z, Zhao Z L. On convergence of tracking differentiator. International Journal of Control, 2011, 84(4): 693-701 doi: 10.1080/00207179.2011.569954 [54] 王艳, 刘斌.基于双曲函数的非线性跟踪微分器.系统科学与数学, 2017, 37(2): 321-327 http://d.wanfangdata.com.cn/Periodical/xtkxysx-zw201702001Wang Yan, Liu Bin. Nonlinear tracking differentiator based on the hyperbolic function. Journal of Systems Science and Mathematical Sciences, 2017, 37(2): 321-327 http://d.wanfangdata.com.cn/Periodical/xtkxysx-zw201702001 [55] Guo B Z, Han J Q, Xi F B. Linear tracking differentiator and application to online estimation of the frequency of a sinusoidal signal with random noise perturbation. Intetnational Journal of System Science, 2002, 33(5): 351-358 doi: 10.1080/00207720210121771 [56] 李军, 万文军, 王越超.一种新型线性二阶滤波器的研究与应用.控制理论与应用, 2017, 34(3): 312-320 http://www.cqvip.com/QK/90555X/20173/7000196711.htmlLi Jun, Wan Wen-Jun, Wang Yue-Chao. Research and application of a new type of linear second-order filter. Control Theory and Applications, 2017, 34(3): 312-320 http://www.cqvip.com/QK/90555X/20173/7000196711.html [57] 李军, 朱亚清, 陈文, 万文军, 陈世和, 胡康涛, 等.一种新型正弦跟踪微分器的研究与应用.控制理论与应用, 2016, 33(9): 1182-1192 http://www.cnki.com.cn/Article/CJFDTotal-KZLY201609007.htmLi Jun, Zhu Ya-Qing, Chen Wen, Wan Wen-Jun, Chen Shi-He, Hu Kang-Tao, et al. Research and application of a new type of sinusoid tracking differentiator. Control Theory and Applications, 2016, 33(9): 1182-1192 http://www.cnki.com.cn/Article/CJFDTotal-KZLY201609007.htm [58] 李军, 万文军, 胡康涛.一种基于点频滤波器的微分信号提取方法.自动化学报, 2017, 43(3): 478-486 doi: 10.16383/j.aas.2017.c160012Li Jun, Wan Wen-Jun, Hu Kang-Tao. A new method for extraction of process differential signal based onsingle-frequency-pass filter. Acta Automatica Sinica, 2017, 43(3): 478-486 doi: 10.16383/j.aas.2017.c160012 [59] 李军, 陈世和, 万文军, 王越超, 黄卫剑.一种内反馈控制器IFC的研究与应用.自动化学报, 2018, 44(9): 1706-1716 doi: 10.16383/j.aas.2018.c160815Li Jun, Chen Shi-He, Wan Wen-Jun, Wang Yue-Chao, Huang Wei-Jian.An internal feedback controller. Acta Automatica Sinica, 2018, 44(9): 1706-1716 doi: 10.16383/j.aas.2018.c160815 [60] 李军, 黄卫剑, 万文军, 朱亚清, 潘凤萍.一种新型抗扰控制方法的研究与应用.广东电力, 2018, 31(3): 1-8 http://www.cnki.com.cn/Article/CJFDTotal-GDDL201803002.htmLi Jun, Huang Wei-Jian, Wang Wen-Jun, Zhu Ya-Qing, Pan Feng-Ping. Research and application of one new-type disturbance rejection control method. Guangdong Electric Power, 2018, 31(3): 1-8 http://www.cnki.com.cn/Article/CJFDTotal-GDDL201803002.htm [61] 李军, 万文军.一种基于序列零初相位调制的新型正弦信号频率测量方法.自动化学报, 2016, 42(10): 1585-1594 doi: 10.16383/j.aas.2016.c150891Li Jun, Wan Wen-Jun. A novel sinusoidal frequency measurement method based on modulation of sequence with zero initial phase. Acta Automatica Sinica, 2016, 42(10): 1585-1594 doi: 10.16383/j.aas.2016.c150891 [62] 李军, 王越超, 李锋.一种基于序列和反褶序列精密初相位计算的新型正弦频率测量方法.电子学报, 2016, 44(10): 2370-2376 doi: 10.3969/j.issn.0372-2112.2016.10.013Li Jun, Wang Yue-Chao, Li Feng. A novel sinusoidal frequency measurement method based on precise calculation of Initial phase of sequence and deconvolution sequence. Acta Electronica Sinica, 2016, 44(10): 2370-2376 doi: 10.3969/j.issn.0372-2112.2016.10.013 [63] 朱波, 王新华, 蔡开元.双积分系统阶跃响应快速无超调控制:一种增益切换非线性PD控制.控制理论与应用, 2009, 26(10): 1111 -1117 http://www.cnki.com.cn/Article/CJFDTotal-KZLY200910014.htmZhu Bo, Wang Xin-Hua, Cai Kai-Yuan. Fast and nonovershooting control for a double-integral system with step input: nonlinear PD control based on gain-switching. Control Theory and Applications, 2009, 26(10): 1111-1117 http://www.cnki.com.cn/Article/CJFDTotal-KZLY200910014.htm [64] 黄伟煌, 胡书举, 林资旭, 付勋波, 许洪华.一种采用相位超前校正技术的电压源逆变器单环控制策略.中国电机工程学报, 2013, 33(30): 18-25 http://d.wanfangdata.com.cn/Periodical/zgdjgcxb201330005Huang Wei-Huang, Hu Shu-Ju, Lin Zi-Xu, Fu Xun-Bo, Xu Hong-Hua. A single-loop control strategy based on phase lead correction for voltage source inverters. Proceedings of the CSEE, 2013, 33(30): 18-25 http://d.wanfangdata.com.cn/Periodical/zgdjgcxb201330005 [65] 叶智, 李晓博, 康毅, 马乐, 杨新民, 高海东. FCS165现场总线控制系统实际微分PID控制器的设计.热力发电, 2011, 40(8): 38-40 doi: 10.3969/j.issn.1002-3364.2011.08.038Ye Zhi, Li Xiao-Bo, Kang Yi, Ma Le, Yang Xin-Min, Gao Hai-Dong. Design of actual differential PID controller used in FCS 165 field bus control system. Thermal Power Generation, 2011, 40(8): 38-40 doi: 10.3969/j.issn.1002-3364.2011.08.038 [66] 程赟, 陈增强, 孙明玮, 孙青林.多变量逆解耦自抗扰控制及其在精馏塔过程中的应用.自动化学报, 2017, 43(6): 1080-1088 doi: 10.16383/j.aas.2017.c170137Cheng Yun, Chen Zeng-Qiang, Sun Ming-Wei, Sun Qing-Lin. Multivariable inverted decoupling active disturbance rejection control and its application to a distillation column process. Acta Automatica Sinica, 2017, 43(6): 1080-1088 doi: 10.16383/j.aas.2017.c170137 [67] 陈烨, 李银伢, 戚国庆, 盛安冬.多通道解耦事件触发机制及其在光电传感网络中的应用.自动化学报, 2017, 43(2): 227-237 doi: 10.16383/j.aas.2017.c160088Chen Ye, Li Yin-Ya, Qi Guo-Qing, Sheng An-Dong. A multi-channel decoupled event triggered transmission mechanism and its application to optic-electric sensor network. Acta Automatica Sinica, 2017, 43(2): 227-237 doi: 10.16383/j.aas.2017.c160088 -

 下载:
下载:




计量
- 文章访问数: 1652
- HTML全文浏览量: 767
- PDF下载量: 607
- 被引次数: 0
