

SAR Target Recognition Based on Dictionary Learning and Extended Joint Dynamic Sparse Representation
-
摘要: 提出了一种基于字典学习和拓展联合动态稀疏表示的合成孔径雷达(Synthetic aperture radar, SAR)图像的目标自动识别(Automatic target recognition, ATR)方法.首先, 在图像预处理时, 分割出目标区域和目标遮挡地面形成的阴影区域, 将这两个区域的信息结合起来能更好地表示图像.其次, 将字典学习方法LC-KSVD (Label consistent k-singular value decomposition)引入到训练阶段中, 分别学习目标区域和阴影区域的特征字典, 而不是直接将所有训练样本作为固定字典.最后, 在测试阶段提出了拓展联合动态稀疏表示算法, 使图像数据中的两个特征共享相似但不完全相同的稀疏模式, 还可处理图像噪声遮挡损坏问题.标准数据集上的实验结果表明, 该方法使不同类别更具区分性, 有效地提高了SAR图像的目标识别准确度.
-
关键词:
- 字典学习 /
- 拓展联合动态稀疏表示 /
- 目标识别 /
- 合成孔径雷达图像
Abstract: This paper proposes a target automatic recognition (ATR) method for synthetic aperture radar (SAR) images based on dictionary learning and extended joint dynamic sparse representation. First of all, in the step of image preprocessing, the target area and the shadow area formed by the target obstructing the ground are segmented. Combining the information of these two areas can represent the image better. Secondly, instead of directly using all the training samples as fixed dictionaries, a dictionary learning method, LC-KSVD (Label consistent k-singular value decomposition), is introduced into the training phase to learn the feature dictionaries of target area and shadow area. Finally, the extended joint dynamic sparse representation algorithm, EJDSR (Extended joint dynamic sparse representation), is proposed in the testing phase. It allows two features in the image data to share similar but not identical sparse patterns. It can also handle the noise, occlusion, damage problems of images. The experimental result on the standard data set shows that this method makes different categories more distinguishable and effectively improves the target recognition accuracy of SAR images.-
Key words:
- Dictionary learning /
- extended joint dynamic sparse representation /
- target recognition /
- synthetic aperture radar (SAR) image
1) 本文责任编委 桑农 -

图 1 基于字典学习和拓展联合动态稀疏表示的SAR目标识别方法流程图
Fig. 1 Flowchart of SAR target recognition based on dictionary learning and extended joint dynamic sparse representation
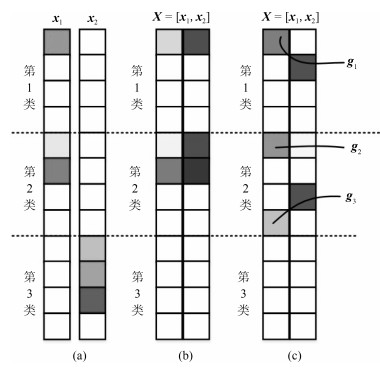
图 3 不同稀疏模型的系数矩阵
Fig. 3 Illustration of coefficient matrix $\mathit{\boldsymbol{X}}$ of different sparse models
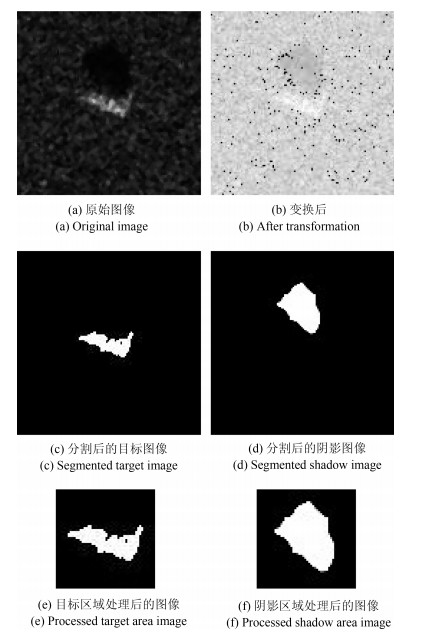
图 4 SAR图像(以BMP2为例)预处理结果
Fig. 4 Preprocessing result of SAR image (take BMP2 as an example)

图 6 不同稀疏度下识别正确率随字典尺寸变化的情况
Fig. 6 The variety trend of recognition accuracy with the dictionary size under different sparsity
表 1 样本的类别和数量
Table 1 Categories and quantities of samples
训练样本 样本数量 测试样本 样本数量 BMP2-SN9563 233 BMP2-SN9563 195 – – BMP2-SN9566 196 – – BMP2-SNC21 196 BTR70-SNC71 233 BTR70-SNC71 196 T72-SN132 233 T72-SN132 196 – – T72-SN812 195 – – T72-SNS7 191 总数 698 总数 1 365  下载: 导出CSV
下载: 导出CSV
表 2 DL + EJDSR方法的识别结果
Table 2 The identification result of DL + EJDSR
型号 BMP2 BTR70 T72 识别正确率(%) BMP2-SN9563 190 5 0 97.44 BMP2-SN9566 181 6 9 92.35 BMP2-SNC21 182 4 10 92.85 BTR70-SNC71 0 196 196 100 T72-SN132 0 0 196 100 T72-SN812 9 12 174 89.23 T72-SNS7 20 6 165 86.39
下载: 导出CSV
-
[1] Yang H Y, Cao Z J. Target detection performance analysis of SAR image with different resolutions based on template matching. In: Proceedings of the 3rd International Conference on Communications, Signal Processing, and Systems. Switzerland: Springer, 2015. 322: 177-185 [2] Zhou P, Guo G, Xiong F. Research on modified SVM for classification of SAR images. In: Proceedings of the 2017 International Conference on Frontiers of Manufacturing Science and Measuring Technology. France: Atlantis Press, 2017 [3] Zhan R H, Hu J M, Zhang J. SAR ATR based on convolutional neural network. Journal of Radars, 2016, 5(3): 229- 243 [4] Wright J, Yang A Y, Ganesh A, Sastry S S, Ma Y. Robust face recognition via sparse representation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009, 31(2): 210-227 doi: 10.1109/TPAMI.2008.79 [5] Zhang H C, Nasrabadi N M, Zhang Y, Huang T S. Multi-view automatic target recognition using joint sparse representation. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(3): 2481-2497 doi: 10.1109/TAES.2012.6237604 [6] 丁军, 刘宏伟, 王英华, 王正珏, 齐会娇, 时荔蕙.一种联合阴影和目标区域图像的SAR目标识别方法.电子与信息学报, 2015, 37(3): 594-600 http://www.cnki.com.cn/Article/CJFDTotal-DZYX201503013.htmDing Jun, Liu Hong-Wei, Wang Ying-Hua, Wang Zheng-Jue, Qi Hui-Jiao, Shi Li-Hui. SAR Target recognition by combining images of the shadow region and target region. Journal of Electronic Information, 2015, 37(3): 594-600 http://www.cnki.com.cn/Article/CJFDTotal-DZYX201503013.htm [7] Aharon M, Elad M, Bruckstein A. K-SVD: an algorithm for designing overcomplete dictionaries for sparse representation. IEEE Transactions on Signal Processing, 2006, 54(11): 4311-4322 doi: 10.1109/TSP.2006.881199 [8] Jiang Z L, Lin Z, Davis L S. Label consistent K-SVD: learning a discriminative dictionary for recognition. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(11): 2651-2664 doi: 10.1109/TPAMI.2013.88 [9] Zhang H C, Nasrabadi N M, Zhang Y, Huang T S. Joint dynamic sparse representation for multi-view face recognition. Pattern Recognition, 2012, 45(4): 1290-1298 doi: 10.1016/j.patcog.2011.09.009 [10] 齐会娇, 王英华, 丁军, 刘宏伟.基于多信息字典学习及稀疏表示的SAR目标识别.系统工程与电子技术, 2015, 37(6): 1280-1287 http://d.wanfangdata.com.cn/periodical/xtgcydzjs201506009Qi Hui-Jiao, Wang Ying-Hua, Ding Jun, Liu Hong-Wei. SAR target recognition based multi-information dictionary learning and sparse representation. System Engineering and Electronic Technology, 2015, 37(6): 1280-1287 http://d.wanfangdata.com.cn/periodical/xtgcydzjs201506009 [11] Lian X J, Wu Y, Zhao W, Wang F, Zhang Q, Li M. Unsupervised SAR image segmentation based on conditional triplet markov fields. IEEE Geoscience and Remote Sensing Letters, 2014, 11(7): 1185-1189 doi: 10.1109/LGRS.2013.2286222 [12] 方庆.基于压缩感知的SAR图像目标识别技术研究[硕士学位论文].电子科技大学, 中国, 2012.Fang Qing. Research on SAR image target recognition technology based on compressive Sensing[Master thesis], University of Electronic Science and Technology, China, 2012. [13] Zhang H C, Nasrabadi N M, Huang T S, Zhang Y N. Joint sparse representation based automatic target recognition in SAR images. In: Proceedings of the 2011 SPIE——The International Society for Optical Engineering. Washington, USA: SPIE, 2011. 8051(5): 361-372 [14] 周唯.基于局部约束联合动态稀疏表示的人脸识别研究[硕士学位论文].东北师范大学, 中国, 2015.Zhou Wei. Research on face recognition based on locally constrained joint dynamic sparse representation[Master thesis], Northeast Normal University, China, 2015. [15] Tropp J A, Gilbert A C, Strauss M J. Algorithms for simultaneous sparse approximation. Part Ⅰ: Greedy pursuit. Signal Processing, 2006, 86(3): 572-588 doi: 10.1016/j.sigpro.2005.05.030 [16] Duarte M F, Cevher V, Baraniuk R G. Model-based compressive sensing for signal ensembles. In: Proceedings of the 2009 Allerton Conference on Communication, Control, and Computing. New York, USA: IEEE, 2009. 244-250 -

 下载:
下载:



计量
- 文章访问数: 849
- HTML全文浏览量: 610
- PDF下载量: 204
- 被引次数: 0
