

Disturbance Rejection and Vibration Control for a Floating Ocean Thermal Energy Conversion System
-
摘要: 随着化石能源的日渐枯竭,海洋热能转换系统(Ocean thermal energy conversion,OTEC)是可以利用海水间的温差将清洁、可再生的海洋能转换为电能的能源系统,关于该系统的研究已引起了越来越多的关注与研究.在工作过程中,浮式海浪温差发电系统中用于传输深层低温海水的管道会受到外界环境的影响产生振动,而这些振动会直接影响系统的性能.本文将研究该柔性系统的振动控制问题,首先,建立用一个偏微分方程和一组常微分方程组成的模型来描述OTEC系统的动力学特性,并直接基于系统的动力学模型设计主动的边界控制器以及边界扰动观测器,从而消除外界扰动的影响,以及减少OTEC系统中柔性管道的横向形变,抑制系统的振动.此外,本文还考虑了OTEC系统中存在的输出约束问题,并且在所设计边界控制律的作用下,从理论上证明OTEC系统的稳定性,保证OTEC系统中的柔性管道的形变量最终收敛于平衡点附近以及浮式平台固定在初始位置附近.最后,通过选择合适的控制参数来对OTEC系统进行数字仿真,利用所得到的仿真结果验证了所设计控制律的有效性.Abstract: With the demands of the renew resource, the ocean thermal energy conversion system which transfers the ocean resource to electrical energy draws lots of attentions. The flexible pipe which is used to transport cold water in the ocean thermal energy conversion (OTEC) system will generate the vibration under the external disturbances. A partial differential equation and some ordinary differential equations are presented to describe the dynamics of the float OTEC system, and active boundary control laws with disturbance observers are designed based on the dynamical model to reduce the transverse displacement. Besides, the output constraint problem of this system is handled with the control method. Further, the stability of the floating OTEC system and the effectiveness of the designed control laws are proven in theory and in numerical simulation.1) 本文责任编委 姚鹏飞
-
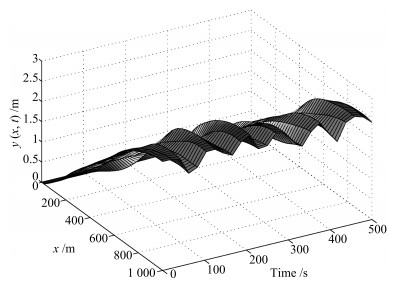
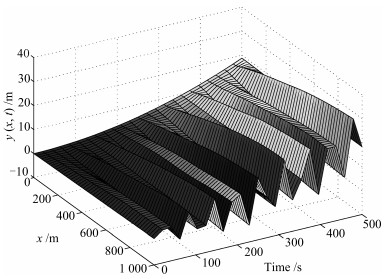
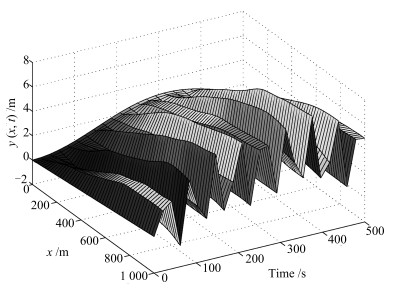
图 6 施加所设计控制器下的柔性输水管道的位移量
Fig. 6 Displacement of the flexible pipe with the designed controllers
表 1 浮式OTEC系统的参数
Table 1 Parameters of floating OTEC system
参数 参数值 参数 参数值 $L$ 1 000 $\rm{m}$ $\rho$ 500 $\rm{kg/m}$ $EI$ $2.5\times{}10^{4}$ $\rm{N}\small{\cdot}\rm{m}^{2}$ $T$ $1\times10^{7} \rm{N}$ $M_{s}$ $9.0\times10^{4} \rm{kg}$ $M_{0}$ $9.5\times10^{6} \rm{kg}$ $c$ 2 $\rm{N}\small{\cdot}\rm{s/m}^{2}$ $d_{s}$ $2.0\times10^{3}$ $\rm{N}\small{\cdot}\rm{s/m}^{2}$ $d_{0}$ $9.0\times10^{2}$ $\rm{N}\small{\cdot}\rm{s/m}^{2}$  下载: 导出CSV
下载: 导出CSV
表 2 扰动参数
Table 2 Parameters of ocean disturbances
参数 参数值 参数 参数值 $U'_{1}$ 0.8 $\rm{m/s}$ $\omega_{3}$ 2.946 $\rm{rad/s}$ $U'_{2}$ 1.0 $\rm{m/s}$ $\omega_{4}$ 4.282 $\rm{rad/s}$ $U'_{3}$ 1.0 $\rm{m/s}$ $D$ 0.15 $\rm{m}$ $U'_{4}$ 1.0 $\rm{m/s}$ $\rho_{s}$ 1 024 $\rm{kg/m}^{3}$ $\bar{U}$ 0.5 $\rm{m/s}$ $S_{t}$ 0.2 $A_{D}$ 1.0 $C_{D}$ 1.0 $\omega_{1}$ 0.867 $\rm{rad/s}$ $\omega_{2}$ 1.827 $\rm{rad/s}$
下载: 导出CSV
-
[1] Yeh R H, Su T Z, Yang M S. Maximum output of an OTEC power plant. Ocean Engineering, 2005, 32(5):685-700 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ed0656f1abe705754e3eac1159b539f2 [2] Straatman P J T, Wilfried G J H M van Sark. A new hybrid ocean thermal energy conversio-offshore solar pond (OTEC-OSP) design:a cost optimization approach. Solar Energy, 2008, 82(6):520-527 doi: 10.1016/j.solener.2007.12.002 [3] Yuan H, Mei N, Hu S, Wang L, Yang S. Experimental investigation on an ammonia-water based ocean thermal energy conversion system. Applied Thermal Engineering, 2013, 61(2):327-333 doi: 10.1016/j.applthermaleng.2013.07.050 [4] Tchanche B F, Pétrissans M, Papadakis G. Heat resources and organic rankine cycle machines. Renewable and Sustainable Energy Reviews, 2014, 39:1185-1199 doi: 10.1016/j.rser.2014.07.139 [5] Rajagopalan K, Nihous G C. Estimates of global ocean thermal energy conversion (OTEC) resources using an ocean general circulation model. Renewable Energy, 2013, 50:532-540 doi: 10.1016/j.renene.2012.07.014 [6] Nihous G C. An estimate of Atlantic ocean thermal energy conversion (OTEC) resources. Ocean Engineering, 2007, 34(17):2210-2221 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a784f942a52169333fe284482e305024 [7] Wang L, Huang C B. Dynamic stability analysis of a grid-connected solar-concentrated ocean thermal energy conversion system. IEEE Transactions on Sustainable Energy, 2010, 1(1):10-18 doi: 10.1109/TSTE.2010.2046189 [8] He W, Ge S S, How B V E, Choo Y S. Dynamics and Control of Mechanical Systems in Offshore Engineering. London, UK:Springer, 2014. [9] Wang J M, Ren B, Krstic M. Stabilization and gevrey regularity of a Schrödinger equation in boundary feedback with a heat equation. IEEE Transactions on Automatic Control, 2012, 57(1):179-185 doi: 10.1109/TAC.2011.2164299 [10] Wu H N, Wang J W. Static output feedback control via PDE boundary and ODE measurements in linear cascaded ODE-beam systems. Automatica, 2014, 50(11):2787-2798 doi: 10.1016/j.automatica.2014.09.006 [11] Luo B, Wu H N, Li H X. Adaptive optimal control of highly dissipative nonlinear spatially distributed processes with neuro-dynamic programming. IEEE Transactions on Neural Networks and Learning Systems, 2015, 26(4):684-696 doi: 10.1109/TNNLS.2014.2320744 [12] Wang J W, Wu H N, L H X. Stochastically exponential stability and stabilization of uncertain linear hyperbolic PDE systems with Markov jumping parameters. Automatica, 2012, 48(3):569-576 doi: 10.1016/j.automatica.2012.01.006 [13] Endo T, Matsuno F, Jia Y M. Boundary cooperative control by flexible Timoshenko arms. Automatica, 2017, 81:377-389 doi: 10.1016/j.automatica.2017.04.017 [14] Guo B Z, Jin F F. The active disturbance rejection and sliding mode control approach to the stabilization of the Euler-Bernoulli beam equation with boundary input disturbance, Automatica, 2013, 49(9):2911-2918 doi: 10.1016/j.automatica.2013.06.018 [15] Jin F F, Guo B Z. Lyapunov approach to output feedback stabilization for the Euler-Bernoulli beam equation with boundary input disturbance. Automatica, 2015, 52(1):95-102 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=24130845da1dde25931039a5fdf6b963 [16] He W, Zhang S, Ge S S. Boundary control of a flexible riser with application to marine installation. IEEE Transactions on Industrial Electronics, 2013, 60(12):5802-5810 doi: 10.1109/TIE.2013.2238873 [17] Do K D. Stochastic boundary control design for extensible marine risers in three dimensional space. Automatica, 2017, 77(3):184-197 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b4a0296362a5c661c371a769cd898ef8 [18] Bhikkaji B, Moheimani S O R, Petersen I R. A negative imaginary approach to modeling and control of a collocated structure. IEEE/ASME Transactions on Mechatronics, 2012, 17(4):717-727 doi: 10.1109/TMECH.2011.2123909 [19] Wang F Y, Gao Y Q. On Frequency sensitivity and mode orthogonality of flexible robotic manipulators. IEEE/CAA Journal of Automatica Sinica, 2016, 3(4):394-397 doi: 10.1109/JAS.2016.7510112 [20] Zhang S. Sliding mode control for an inhomogeneous heat equation with global constraint. Asian Journal of Control, 2017, 19(6):2116-2126 doi: 10.1002/asjc.1607 [21] He W, He X Y, Ge S S. Vibration control of flexible marine riser systems with input saturation. IEEE/ASME Transactions on Mechatronics, 2016, 21(1):254-265 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=6c294a19272e13a2abda4b6224a3457f [22] Endo T, Sasaki M, Matsuno F, Jia Y M. Contact-force control of a flexible timoshenko arm in rigid/soft environment. IEEE Transactions on Automatic Control. 2016, 62(5):2546-2553 [23] Do K D, Sasaki M, Matsuno F, Jia Y M. Modeling and boundary control of translational and rotational motions of nonlinear slender beams in three-dimensional space. Journal of Sound and Vibration, 2017, 389:1-23 doi: 10.1016/j.jsv.2016.10.044 [24] Cai X S, Krstic M. Nonlinear stabilization through wave PDE dynamics with a moving uncontrolled boundary. Automatica, 2016, 68:27-38 doi: 10.1016/j.automatica.2016.01.043 [25] Paranjape A A, Guan J, Chung S J, Krstic M. PDE boundary control for flexible articulated wings on a robotic aircraft. IEEE Transactions on Robotics, 2013, 29(3):625-640 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0cac9b0ef5b48000e43b6f8592ddbb2b [26] Liu Z J, Liu J K, He W. Modeling and vibration control of a flexible aerial refueling hose with variable lengths and input constraint. Automatica, 2017, 77:302-310 doi: 10.1016/j.automatica.2016.11.002 [27] Zhao Z J, Liu Z J, Li Z F, Wang N, Yang J F. Control design for a vibrating flexible marine riser system. Journal of the Franklin Institute, 2017, 354(18):8117-8133 doi: 10.1016/j.jfranklin.2017.10.004 [28] Zhao Z J, Liu Y, Guo F, Fu Y. Modelling and control for a class of axially moving nonuniform system. International Journal of Systems Science, 2017, 48(4):849-861 doi: 10.1080/00207721.2016.1217099 [29] Liu Z J, Liu J K, He W. Robust adaptive fault tolerant control for a linear cascaded ODE-beam systems. Automatica, 2018, 98:42-50 doi: 10.1016/j.automatica.2018.09.021 [30] He X Y, He W, Shi J, Sun C Y. Boundary vibration control of variable length crane systems in two dimensional space with output constraints. IEEE/ASME Transactions on Mechatronics, 2017, 22(5):1952-1962 doi: 10.1109/TMECH.2017.2721553 [31] Rahn C D. Mechatronic Control of Distributed Noise and Vibration. New York, USA:Springer-Verlag, 2001. [32] Hardy G H, Littlewood J E, Polya G. Inequalities. Cambridge, UK:Cambridge University Press, 1959. [33] Polycarpou M M, Loannou P A. A robust adaptive nonlinear control design. Automatica, 1996, 32(3):423-427 doi: 10.1016/0005-1098(95)00147-6 [34] Blevins R D. Flow-induced Vibration. New York, USA:Van Nostrand Reinhold, 1977. [35] Faltinsen O M. Sea Loads on Ships and Offshore Structures. Cambridge, UK:Cambridge Unversity Press, 1990. [36] Skjetne R, Fossen T I, Kokotovimć P V. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica, 2005, 41(2):289-298 doi: 10.1016/j.automatica.2004.10.006 [37] Tee K P, Ge S S. Control of fully actuated ocean surface vessels using a class of feedforward approximators. IEEE Transactions on Control Systems Technology, 2006, 14(4):750-756 doi: 10.1109/TCST.2006.872507 -

 下载:
下载:

图(7) / 表(2)
计量
- 文章访问数: 1550
- HTML全文浏览量: 294
- PDF下载量: 131
- 被引次数: 0
