

-
摘要: 针对发生执行器故障的多智能体系统, 论文提出一种新型分布式中间观测器的设计方法, 可以同时估计系统的状态和故障.本文设计的观测器可以应用于严格正实条件和观测器匹配条件不满足的系统.针对多智能体系统的通讯拓扑是有向图和无向图的情况, 分别获得估计误差系统稳定的条件.观测器的参数矩阵可以通过求解线性矩阵不等式(Linear matrix inequality, LMI)计算.针对具有有向拓扑的多智能体系统, 本文方法所需求解的LMI的维数, 等于对单个智能体系统设计观测器所需求解的LMI的维数.这表明应用本文方法进行故障估计时, 计算量不会随着系统中智能体数目的增加而增加.针对多智能体系统通讯拓扑是无向图的情况, 利用Laplacian矩阵的对称性, 可以得到保守性更小的结论.最后, 仿真算例验证了本文方法的有效性.Abstract: This paper focuses on the problem of robust distributed fault estimation for multi-agent systems with actuator faults. An intermediate observer design method is proposed to estimate the system states and faults simultaneously. The proposed observer can be used for the systems in which the strictly positive real condition and the observer matching condition are not satisfied. For the cases that the communication topology is a directed graph and an undirected graph respectively, sufficient conditions are obtained, which can ensure that the error systems are stable. The observer parameter matrices can be calculated utilizing the linear matrix inequality (LMI) technique. For the case that the communication topology is a directed graph, the dimension of the LMI needed to be solved is equal to that for the single agent system. This implies that the calculated amount remains unchanged even the number of agents increasing. For the case that the communication topology is an undirected graph, based on the symmetry of the Laplacian matrix, results with less conservative can be obtained. At last, simulation results are provided to illustrate the effectiveness of the proposed techniques.
-
Key words:
- Multi-agent systems /
- distributed fault estimation /
- intermediate observer /
- linear matrix inequality (LMI)
1) 本文责任编委 潘泉 -
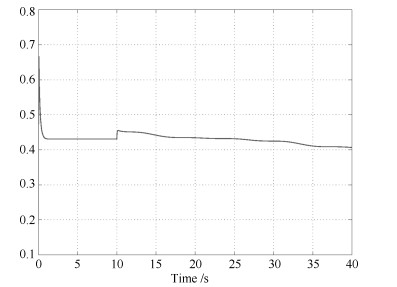
图 5 $\sqrt{\int_0^tY^{\rm T}(s)Y(s){\rm d}s}$和$\sqrt{\int_0^t\bar{\omega}^{\rm T}(s)\bar{\omega}(s){\rm d}s}$的比值
Fig. 5 The ratio of $\sqrt{\int_0^tY^{\rm T}(s)Y(s){\rm d}s}$ and $\sqrt{\int_0^t\bar{\omega}^{\rm T}(s)\bar{\omega}(s){\rm d}s}$
-
[1] Huang J, Fang H, Dou L H, Chen J. An overview of distributed high-order multi-agent coordination. IEEE/CAA Journal of Automatica Sinica, 2014, 1(1): 1-9 [2] Zhang H G, Liang H J, Wang Z S, Feng T. Optimal output regulation for heterogeneous multiagent systems via adaptive dynamic programming. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(1): 18-29 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=623b87f38a880ce3eb2224e8f92de769 [3] 唐于涛, 洪奕光.基于近似模拟的多智能体系统分布式层次控制设计.自动化学报, 2013, 39(6): 868-874 doi: 10.3724/SP.J.1004.2013.00868Tang Yu-Tao, Hong Yi-Guang. Hierarchical distributed control design for multi-agent systems using approximate simulation. Acta Automatica Sinica, 2013, 39(6): 868-874 doi: 10.3724/SP.J.1004.2013.00868 [4] Wang Z, He M, Zheng T, Fan Z L, Liu G B. Guaranteed cost consensus for high-dimensional multi-agent systems with time-varying delays. IEEE/CAA Journal of Automatica Sinica, 2018, 5(1): 181-189 doi: 10.1109/JAS.2017.7510430 [5] 许耀赆, 田玉平.线性及非线性一致性问题综述.控制理论与应用, 2014, 31(7): 837-849 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201407003Xu Yao-Jin, Tian Yu-Ping. A survey of linear and nonlinear consensus problems in multi-agent systems. Control Theory & Applications, 2014, 31(7): 837-849 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201407003 [6] Wu Y M, Wang Z S, Ding S B, Zhang H G. Leader-follower consensus of multi-agent systems in directed networks with actuator faults. Neurocomputing, 2018, 275: 1177-1185 doi: 10.1016/j.neucom.2017.09.066 [7] Chen J, Patton R J. Robust Model-Based Fault Diagnosis for Dynamic Systems. Norwell, MA: Kluwer Academic Publishers, 1999. [8] 周东华, 刘洋, 何潇.闭环系统故障诊断技术综述.自动化学报, 2013, 39(11): 1933-1943 doi: 10.3724/SP.J.1004.2013.01933Zhou Dong-Hua, Liu Yang, He Xiao. Review on fault diagnosis techniques for closed-loop systems. Acta Automatica Sinica, 2013, 39(11): 1933-1943 doi: 10.3724/SP.J.1004.2013.01933 [9] 鄢镕易, 何潇, 周东华.一类存在参数摄动的线性随机系统的鲁棒间歇故障诊断方法.自动化学报, 2016, 42(7): 1004-1013 doi: 10.16383/j.aas.2016.c150756Yan Rong-Yi, He Xiao, Zhou Dong-Hua. Robust diagnosis of intermittent faults for linear stochastic systems subject to time-varying perturbations. Acta Automatica Sinica, 2016, 42(7): 1004-1013 doi: 10.16383/j.aas.2016.c150756 [10] Ding S X. Model-Based Fault Diagnosis Techniques: Design Schemes, Algorithms and Tools. Berlin: Springer-Verlag, 2008. [11] Teixeira A, Shames I, Sandberg H, Johansson K H. Distributed fault detection and isolation resilient to network model uncertainties. IEEE Transactions on Cybernetics, 2014, 44(11): 2024-2037 doi: 10.1109/TCYB.2014.2350335 [12] Liu X H, Gao X W, Han J. Observer-based fault detection for high-order nonlinear multi-agent systems. Journal of the Franklin Institute, 2016, 353(1): 72-94 doi: 10.1016/j.jfranklin.2015.09.022 [13] Davoodi M R, Khorasani K, Talebi H A, Momeni H R. Distributed fault detection and isolation filter design for a network of heterogeneous multiagent systems. IEEE Transactions on Control Systems Technology, 2014, 22(3): 1061-1069 doi: 10.1109/TCST.2013.2264507 [14] Jiang Y L, Liu J C, Wang S Q. A consensus-based multi-agent approach for estimation in robust fault detection. ISA Transactions, 2014, 53(5): 1562-1568 doi: 10.1016/j.isatra.2014.05.011 [15] Davoodi M, Meskin N, Khorasani K. Simultaneous fault detection and consensus control design for a network of multi-agent systems. Automatica, 2016, 66: 185-194 doi: 10.1016/j.automatica.2015.12.027 [16] Chen G, Song Y D. Fault-tolerant output synchronisation control of multi-vehicle systems. IET Control Theory & Applications, 2014, 8(8): 574-584 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=da89099e46701bec2373ab36ded954e0 [17] 邱爱兵, 吉虹钢, 顾菊平.非均匀采样数据系统时变故障估计与调节最优集成设计.自动化学报, 2014, 40(7): 1493-1504 doi: 10.3724/SP.J.1004.2014.01493Qiu Ai-Bing, Ji Hong-Gang, Gu Ju-Ping. Optimal integrated design of time-varying fault estimation and accommodation for nonuniformly sampled data systems. Acta Automatica Sinica, 2014, 40(7): 1493-1504 doi: 10.3724/SP.J.1004.2014.01493 [18] Youssef T, Chadli M, Karimi H R, Wang R. Actuator and sensor faults estimation based on proportional integral observer for T-S fuzzy model. Journal of the Franklin Institute, 2017, 354(6): 2524-2542 doi: 10.1016/j.jfranklin.2016.09.020 [19] Zhang J, Swain A K, Nguang S K. Robust sensor fault estimation scheme for satellite attitude control systems. Journal of the Franklin Institute, 2013, 350(9): 2581-2604 doi: 10.1016/j.jfranklin.2013.06.010 [20] Yin S, Gao H J, Qiu J B, Kaynak O. Descriptor reduced-order sliding mode observers design for switched systems with sensor and actuator faults. Automatica, 2017, 76: 282-292 doi: 10.1016/j.automatica.2016.10.025 [21] Zhang K, Jiang B, Shi P. Fast fault estimation and accommodation for dynamical systems. IET Control Theory & Applications, 2009, 3(2): 189-199 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b63b863ad1d8fa80b286bc305f985f4f [22] Zhang K, Jiang B, Shumsky A. A new criterion of fault estimation for neutral delay systems using adaptive observer. Acta Automatica Sinica, 2009, 35(1): 85-91 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdhxb200901013 [23] Zhu J W, Yang G H, Wang H, Wang F L. Fault estimation for a class of nonlinear systems based on intermediate estimator. IEEE Transactions on Automatic Control, 2016, 61(9): 2518-2524 doi: 10.1109/TAC.2015.2491898 [24] Menon P P, Edwards C. Robust fault estimation using relative information in linear multi-agent networks. IEEE Transactions on Automatic Control, 2014, 59(2): 477-482 doi: 10.1109/TAC.2013.2274689 [25] Zhu J W, Yang G H. Robust distributed fault estimation for a network of dynamical systems. IEEE Transactions on Control of Network Systems, 2018, 5(1): 14-22 [26] Zhang K, Jiang B, Cocquempot V. Adaptive technique-based distributed fault estimation observer design for multi-agent systems with directed graphs. IET Control Theory & Applications, 2015, 9(18): 2619-2625 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cd863b3a0dbfd900226af9a468a52e3d [27] Zhang K, Jiang B, Shi P. Adjustable parameter-based distributed fault estimation observer design for multiagent systems with directed graphs. IEEE Transactions on Cybernetics, 2017, 47(2): 306-314 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ca9b49f404683a471d2f2ef433d7c10e [28] 俞立.鲁棒控制:线性矩阵不等式处理方法.北京:清华大学出版社, 2002.Yu Li. Robust Control: A Linear Matrix Inequality Approach. Beijing: Tsinghua University Press, 2002. -

 下载:
下载:



图(8)
计量
- 文章访问数: 3199
- HTML全文浏览量: 1827
- PDF下载量: 410
- 被引次数: 0
