

Dynamic Cooperative Deployment of Emergency Internet of Things Near Ground Space Based on Drone
-
摘要: 针对基于旋翼无人机的近地面空间应急物联网在缺少地面基站和能量受限的情况下, 可靠节能地远距离传输重点区域全信息的要求, 研究由无人机组成的移动Ad-Hoc网络的远距离通信问题, 提出近地面空间应急物联网空地节点动态协同部署方法. 首先, 对该类物联网进行系统建模; 其次, 根据所建模型中无人机编队大范围、队列化、微漂移地分散于监测区域的特点和编队的联合分布情况, 在提供可靠通信的同时, 将系统通信能耗和移动能耗的计算构建成二次约束二次规划问题; 再次, 根据Gerschgorin圆盘定理和根的存在性定理, 证明了此问题为凸优化问题, 进而可求解得到移动地面站的最佳路径点, 实现近地面空间应急物联网空地节点动态协同部署. 最后, 通过实验, 从通信耗能和运动耗能两方面验证了本文所提方法的有效性, 同时, 也分析了影响本文所述方法效能的因素.Abstract: Aiming at the reliable, energy-saving and long-distance transmission requirement of key areas information, without ground base station and limited energy, the long-distance communication problem of a mobile Ad-Hoc network based on multi-drones in the near ground space as emergency Internet of things (eIoT) is studied. A dynamic cooperative deployment method based on drone was proposed. First, model this type of eIoT. Second, given drones' formation scattered in large area, in formation, and moved slowly, energy consumption of communication and movement was calculated as a quadratic programming problem with quadratic constraint. Third, according to the Gerschgorin disc theorem and the existence theorem of the root, the problem above was proved as a convex optimization problem. So the optimal path point of the mobile earth station could be obtained. Dynamic cooperative deployment of eIoT near ground space was realized. Finally, from transferring to moving energy consumption, the effect of the proposed method was verified through experiments. At the same time, the factors that affect the effectiveness of the methods were also analyzed.
-
Key words:
- Public security /
- emergency internet of things /
- mobile earth station /
- drone /
- air-ground synergy
1) 本文责任编委 陈积明 -
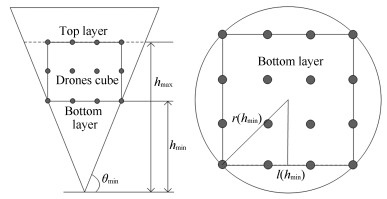
图 3 Drones cube中无人机空基监测平台立体结构
Fig. 3 The three-dimensional structure of the air based monitoring platform for unmanned aerial vehicle in drones cube
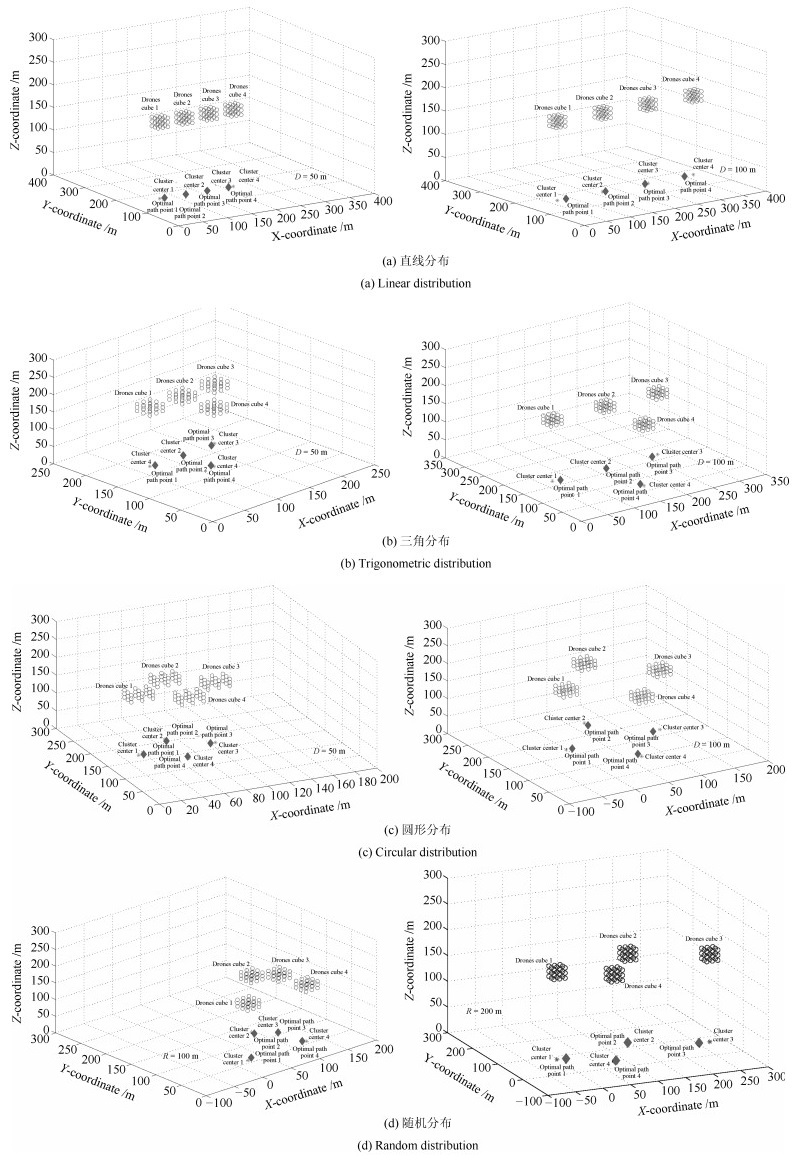
图 4 不同分布的最佳路径点$(h_{\text{min}} = 160 \text{m})$
Fig. 4 The optimal path points in different distribution condition $(h_{\text{min}} = 160 \text{m})$
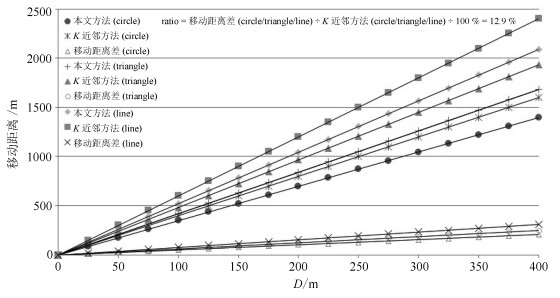
图 5 三种Drones cube分布下的MES移动距离
Fig. 5 MES moving distance under three kinds of drones cube distribution
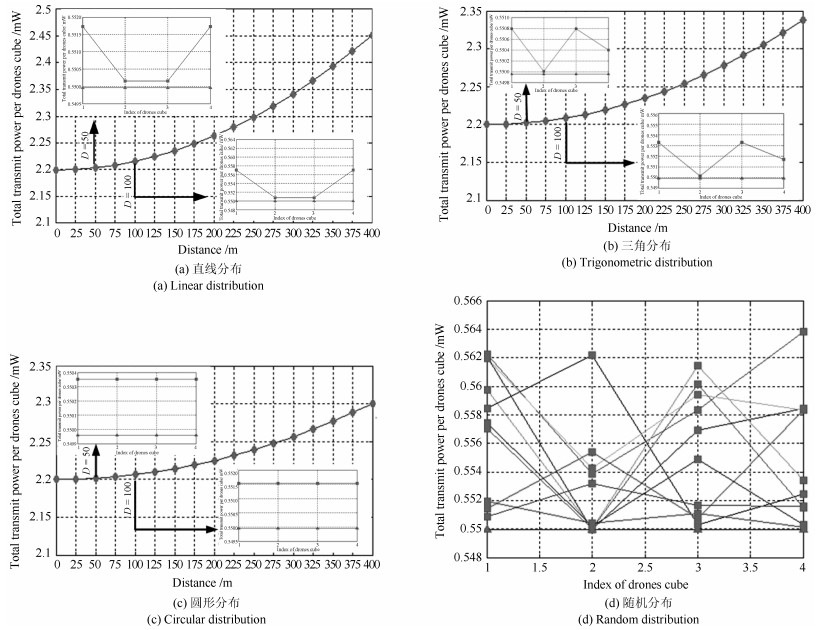
图 6 不同分布的Drones cube静态通信能量$(H = 160 \text{m})$
Fig. 6 Static communication energy under different kinds of Drones cube distribution $(H = 160 \text{m})$
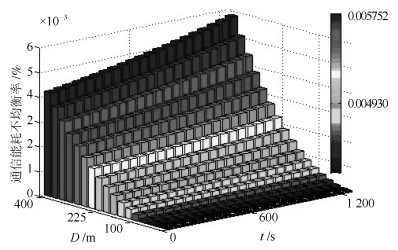
图 7 直线分布Drones cube静态通信能耗纵向不均衡率
Fig. 7 Vertical disequilibrium rate of energy consumption in Drones cube static communication under linear distribution
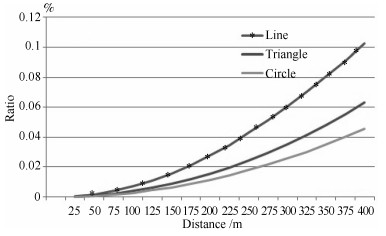
图 8 三种Drones cube分布下的静态通信能耗增长率
Fig. 8 Energy consumption growth rate of static communication under three kinds of Drones cube distribution
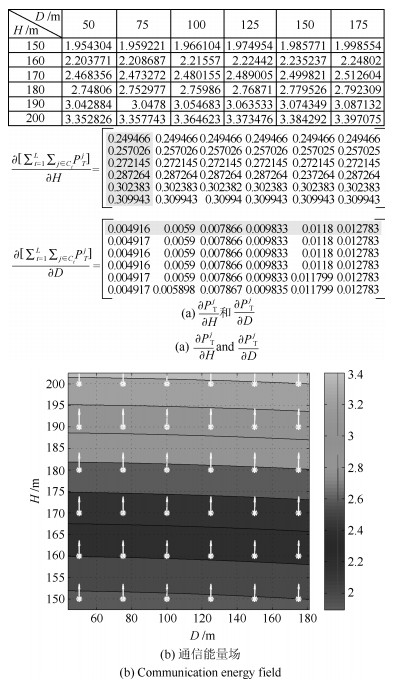
图 9 直线分布的Drones cube静态通信能耗与H和D的关系
Fig. 9 The relationship between the energy consumption of drones cube static communication and H and D

图 10 直线分布的Drones cube静态通信能耗拟合
Fig. 10 Energy consumption fitting of drones cube static communication under linear distribution

图 11 直线分布的Drones cube动态通信能耗$(H = 150, D = 75)$
Fig. 11 Dynamic communication energy consumption of drones cube under linear distribution$(H = 150, D = 75)$
表 1 国内外相关研究
Table 1 Related works
文献 内容 网络类型 无人机数量 不足 [4] 无人机最优部署与移动 D2D通信网络 一个 未研究上行通信 [5] 无人机最优轨迹 Ad-hoc网络 多个 未研究无人机运动 [6] 静态地面用户与无人机联合最优部署 IoT (Internet of things) 多个 未研究地面用户的动态问题 [7] 高效地数据采集与簇头充电方法 WSN (Wireless sensor networks) 多个 只针对静态传感网, 未研究最优部署问题 [8-9] 节能的上行传输策略 IoT M2M (Machine-to machine)网络 – 未考虑设备的运动 [10-11] 过载和中断预防方法 蜂窝网络 多个 未研究无人机覆盖性能 [12] 无人机最优轨迹 WSN 多个 只针对静态传感设备 [13-14] 蜂窝网与D2D (Device-to-device)设备共存 蜂窝网络 一个 未研究无人机的覆盖和通信性能  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数
Table 2 Simulation parameters
参数 描述 值 $f_{c}$ 载波频率 $\text{2 GHz}$ $v_{\cdot}^{t}$ 地面移动中继的速度 $\text{3.6 km/h}$ $E$ 各簇旋翼无人机用于通信总能量 $\text{3 J}$ $\delta$ 误码率要求 $10^{-8}$ $\varepsilon$ 视距通信概率要求 0.95 $N_{\text{o}}$ 噪声功率谱密度 $-170$ dBm/Hz $R_{\text{b}}$ 数据传输速率 $\text{200 kbps}$ $B$ 传输带宽 $\text{200 kHz}$ $\eta$ 附加路径损耗 $\text{5 dB}$ $\psi$ 环境参数1 11.95 $\beta$ 环境参数2 0.14
下载: 导出CSV
表 3 旋翼无人机数量与算法运行时长
Table 3 Number of drones and algorithm running 09:39:56
分布形式 数量$K$ 算法运行时长$(\text{s})$ 平均时长$(\text{s})$ 第1次 第2次 第3次 第4次 第5次 直线 96 10.773 10.722 10.683 10.731 10.689 10.719 108 10.788 10.753 10.761 10.742 10.814 10.772 120 10.795 10.821 10.728 10.801 10.722 10.773 三角 96 10.821 10.791 10.844 10.861 10.742 10.811 108 10.994 11.069 10.711 10.670 10.781 10.845 120 10.892 10.931 10.897 10.911 10.821 10.890 圆形 96 10.873 10.810 10.822 10.789 10.867 10.832 108 10.849 10.872 10.893 10.812 10.827 10.851 120 10.974 10.912 10.812 10.832 10.844 10.874
下载: 导出CSV
表 4 Drones cube簇数与算法运行时长
Table 4 Number of drones cube and algorithm running 09:42:00
分布形式 簇数$L$ 算法运行时长$(\text{s})$ 平均时长$(\text{s})$ 第1次 第2次 第3次 第4次 第5次 直线 3 10.644 10.685 10.673 10.731 10.508 10.648 4 10.788 10.753 10.761 10.742 10.814 10.772 5 10.821 10.876 10.824 10.897 10.933 10.870 三角 3 10.878 10.787 10.709 10.801 10.822 10.799 4 10.994 11.069 10.711 10.670 10.781 10.845 5 10.892 10.977 11.021 10.709 10.898 10.899 圆形 3 10.842 10.801 10.756 10.722 10.793 10.782 4 10.849 10.872 10.893 10.812 10.827 10.851 5 10.910 10.953 10.871 11.213 10.945 10.978
下载: 导出CSV
-
[1] Mozaffari M, Saad W, Bennis M, et al. Mobile internet of things: can UAVs provide an energy-efficient mobile architecture. In: Proceeding of the 2016 IEEE Global Communications Conference (GLOBECOM). Piscataway, USA: IEEE, 2016. 1-6 [2] Sánchez-García J, García-Campos J M, Arzamendia M, et al. A survey on unmanned aerial and aquatic vehicle multi-hop networks: Wireless communications, evaluation tools and applications. Computer Communications, 2018, 119: 43-65 http://www.sciencedirect.com/science/article/pii/S0140366416304315 [3] Jawhar I, Mohamed N, Al-Jaroodi J, et al. Communication and networking of UAV-based systems: Classification and associated architectures. Journal of Network and Computer Applications, 2017, 84: 93-108 doi: 10.1016/j.jnca.2017.02.008 [4] Mozaffari M, Saad W, Bennis M, and et al. Unmanned aerial vehicle with underlaid device-to-device communications: Performance and tradeoffs. IEEE Transaction on Wireless Communications, 2016, 15 (6): 3949-3963 doi: 10.1109/TWC.2016.2531652 [5] Han Z, Swindlehurst A L, Liu K. Optimization of MANET connectivity via smart deployment/movement of unmanned air vehicles. IEEE Transaction on Vehicular Technology, 2009, 58 (7): 3533-3546 doi: 10.1109/TVT.2009.2015953 [6] Mozaffari M, Saad W, Bennis M, et al. Optimal transport theory for power-efficient deployment of unmanned aerial vehicles. In: Proceeding of the 2016 IEEE International Conference on Communications (ICC). Piscataway, USA: IEEE, 2016. 1-6 [7] Pang Y, Zhang Y, Gu Y, et al. Efficient data collection for wireless rechargeable sensor clusters in harsh terrains using UAVs. In: Proceeding of the 2016 IEEE Global Communications Conference (GLOBECOM). Piscataway, USA: IEEE, 2014. 234-239 [8] Abuzainab N, Saad W, Poor H V. Cognitive hierarchy theory for heterogeneous uplink multiple access in the internet of things. In: Proceeding of the 2016 IEEE International Symposium on Information Theory (ISIT). Piscataway, USA: IEEE, 2016. 1252-1256 [9] Tu C Y, Ho C Y, Huang C Y. Energy-efficient algorithms and evaluations for massive access management in cellular based machine to machine communications. In: Proceeding of the 2011 IEEE Vehicular Technology Conference (VTC). Piscataway, USA: IEEE, 2011. 1-5 [10] Daniel K, Wietfeld C. Using public network infrastructures for UAV remote sensing in civilian security operations. Tech. Rep., 2011 [11] Rohde S, Wietfeld C. Interference aware positioning of aerial relays for cell overload and outage compensation. In: Proceeding of the 2012 IEEE Vehicular Technology Conference (VTC). Piscataway, USA: IEEE, 2012. 1-5 [12] Jiang F, Swindlehurst A L. Optimization of UAV heading for the ground-to-air uplink. IEEE Journal on Selected Areas in Communications, 2012, 30 (5): 993-1005 doi: 10.1109/JSAC.2012.120614 [13] Shalmashi S, Bjornson E, Kountouris M, et al. Energy efficiency and sum rate tradeoffs for massive MIMO systems with underlaid device-to-device communications. EURASIP Journal on Wireless Communications and Networking, 2016, 2016 (1): 175 doi: 10.1186/s13638-016-0678-1 [14] Lin X, Heath R, Andrews J. The interplay between massive MIMO and underlaid D2D networking. IEEE Transaction on Wireless Communications, 2015, 14 (6): 1-10 doi: 10.1109/TWC.2015.2434891 [15] 白天翔, 王帅, 沈震, 等. 平行机器人与平行无人系统: 框架、结构、过程、平台及其应用. 自动化学报, 2017, 43 (2): 161-175 doi: 10.16383/j.aas.2017.y000002Bai Tian-Xiang, Wang Shuai, Shen Zhen, et al. Parallel robotics and parallel unmanned systems: Framework, structure, process, platform and applications. Acta Automatica Sinica, 2017, 43 (2): 161-175 doi: 10.16383/j.aas.2017.y000002 [16] 胡向东, 王瑞, 胡蓉. 一种改进的物联网感知层簇维护优化算法. 系统工程与电子技术, 2017, 39 (1): 198-205 https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201701031.htmHu Xiang-Dong, Wang Rui, Hu Rong. Improved optimization algorithm of clusters maintenance for sensing layer of the internet of things. Systems Engineering and Electronics, 2017, 39 (1): 198-205 https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201701031.htm [17] 陈珍萍, 黄友锐, 唐超礼, 等. 物联网感知层低能耗时间同步方法研究. 电子学报, 2017, 44 (1): 193-199 https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201601028.htmChen Zhen-Ping, Huang You-Rui, Tang Chao-Li, et al. Research on low energy consumption time synchronization method for internet of things' perception layer. Acta Electronica Sinica, 2016, 44 (1): 193-199 https://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201601028.htm [18] Hourani A, Kandeepan S, Jamalipour A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In: Proceeding of the 2014 IEEE Global Communications Conference (GLOBECOM). Piscataway, USA: IEEE, 2014. 2898-2904 [19] Fei Z, Li B, Yang S, et al. A survey of multi-objective optimization in wireless sensor networks: metrics, algorithms and open problems. IEEE Communications Surveys & Tutorials, 2017, 19: 550-586 http://ieeexplore.ieee.org/document/7570253 [20] 张霞, 周刚, 于宏毅. 一种协作和中继混合的传感网寿命最大化路由算法. 软件学报, 2013, 24 (12): 2859-2870 https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB201312007.htmZhang Xia, Zhou Gang, Yu Hong-Yi. Cooperative and forwarding hybrid routing algorithm for network lifetime maximization in wireless sensor network. Journal of Software, 2013, 24 (12): 2859-2870 https://www.cnki.com.cn/Article/CJFDTOTAL-RJXB201312007.htm [21] 侯定仁. 内点算法研究[硕士论文], 中国科学技术大学, 中国2001Hou Ding-Ren. Research on Interior-point Algorithm[Master thesis], University of Science and Technology of China, China 2001 [22] 刘美杏. 不等式约束优化新型SQCQP算法研究[硕士论文], 广西大学, 中国2014Liu Mei-Xing. Research on New SQCQP Algorithms for Inequality Constrained Optimization[Master thesis], Guangxi University, China 2014 -

 下载:
下载:


计量
- 文章访问数: 1233
- HTML全文浏览量: 556
- PDF下载量: 240
- 被引次数: 0
