

-
摘要: 平行系统是一种建立在人工社会和计算实验基础上的科学研究方法,它的特点是既能真实反映现实系统的动态过程,又能实时优化现实系统的控制过程.自动化集装箱码头是一类典型的复杂系统,既存在不计其数的作业方案,同时也有大量的约束条件.如何在最短时间和最低能源消耗的前提下,完成具有间歇和批次特征的集装箱转运任务,是涉及到数学、控制、管理和计算机等多个学科的重大课题.本文采用数据引擎作为人工社会中的基本计算单元,构成一个复杂的平行系统,用于自动化集装箱码头信息控制系统的研究.数据引擎作为一种面向图形化元件组态的计算环境,非常适用于复杂系统的建模与计算.在可视化和动态重构技术的支持下,利用380个数据引擎对一个具有8台岸桥、25辆AGV和16台龙门吊组成的港机系统进行了自动化作业过程的计算实验.研究结果表明,数据引擎技术是实现平行系统的有效方法,由多数据引擎组成的计算环境,能够大幅度降低自动化集装箱码头信息控制系统建模的复杂程度,能够将码头系统的管理和控制过程无缝地融合在一起.该平行系统可直接与港机设备对接,建立“人工码头”和“物理码头”之间的平行关系,从而实现对港机设备的最优控制.Abstract: Parallel systems are a kind of scientific research method based on artificial society and computational experiments, which can not only reflect the dynamic process of real system but also optimize the control process of the real system in real time. The automatic container terminal is a typical complex system having numerous operating schemes and a large number of constraints. How to accomplish the container transport task with intermittent and batch features while using minimum time and energy consumption is a major issue, which involves many disciplines such as mathematics, control, management and computer. In this paper, the data engine is used as the basic computing unit of the artificial society of parallel systems, to study the information control system of the container terminal. As a computing environment for graphical configuration, the data engine is ideal for modeling and computation of complex systems. With the support of the visualization and dynamic reconfiguration technologies, 380 data engines are used to perform computational experiments on the automation process of a port system, which consists of 8 bridge cranes, 25 AGVs and 16 gantry cranes. The results indicate the effectiveness of the data engine technology for parallel systems, and the computing environment composed of multiple data engines can greatly reduce the modeling complexity of the port information control system as well as make the information management work with the control process cooperatively. The proposed parallel systems can connect to port devices directly to establish a parallel relationship between "artificial container terminal" and "physical container terminal" so as to achieve the optimal control of the port devices.
-
Key words:
- Parallel system /
- automatic container terminal /
- data engine /
- complex system /
- multi-agents
1) 本文责任编委 魏庆来 -
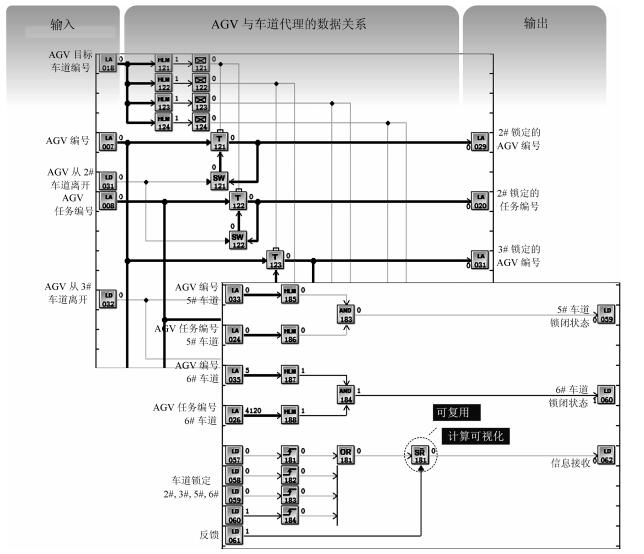
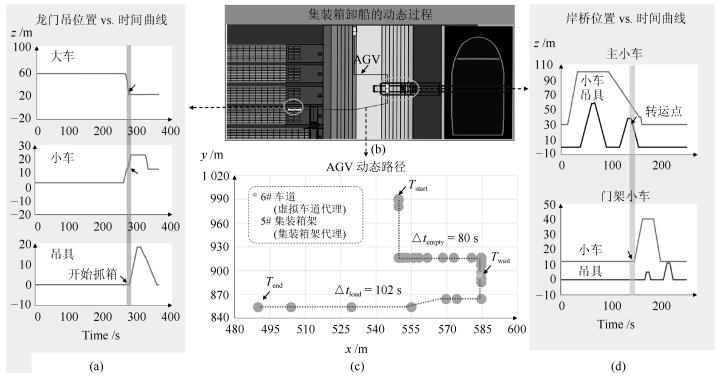
图 6 卸船模型的应用实例: AGV代理与车道代理的动态交互
Fig. 6 An application example of the discharge model: The dynamic interaction among AGV agents and lane agents
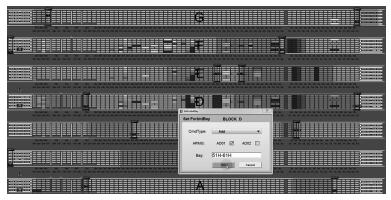
图 12 平行码头中人机交互系统工程应用实例
Fig. 12 An application example of PCTICS human-computer interaction system
表 1 不同行驶策略下AGV的任务时耗(s) $^{1}$
Table 1 The time cost of AGV task under different driving strategies (s) $^{1}$
$T_{\rm mode 1}$ $T'_{\rm mode 1}$ $T_{\rm mode 2}$ $T'_{\rm mode 2}$ (Task 1) (Task 2) (Task 1) (Task 2) 251 316 243 328 267 320 245 315 284 330 253 301 256 349 254 322 257 328 253 327 432 334 260 320 526 328 261 457 468 304 248 533 318 323 265 450 241 323 276 322 $^{1}$Task 1表示从104号岸桥搬运10个集装箱至47号堆场, Task 2表示从105号岸桥搬运10个集装箱至49号堆场; $T_{\rm mode 1}$和$T'_{\rm mode 1}$分别表示无汇流行驶策略下AGV完成任务1和任务2的时耗; $T_{\rm mode 2}$和$T'_{\rm mode 2}$分别表示汇流行驶策略下AGV完成任务1和任务2的时耗.  下载: 导出CSV
下载: 导出CSV
-
[1] Steenken D, Voß S, Stahlbock R. Container terminal operation and operations research-a classification and literature review. OR Spectrum, 2004, 26(1):3-49 doi: 10.1007/s00291-003-0157-z [2] Liu C I, Jula H, Ioannou P A. Design, simulation, and evaluation of automated container terminals. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(1):12-26 doi: 10.1109/6979.994792 [3] Kim K H, Phan M H T, Woo Y J. New conceptual handling systems in container terminals. Industrial Engineering & Management Systems, 2012, 11(4):299-309 http://cn.bing.com/academic/profile?id=f6b73cd7114f43a5dd80468a9a00ca87&encoded=0&v=paper_preview&mkt=zh-cn [4] Dkhil H, Yassine A, Chabchoub H. Optimization of container handling systems in automated maritime terminal. In:Advanced Methods for Computational Collective Intelligence. Studies in Computational Intelligence, vol 457. Berlin, Heidelberg:Springer, 2013. 301-312 https://www.researchgate.net/publication/287785081_Optimization_of_Container_Handling_Systems_in_Automated_Maritime_Terminal [5] Jin J G, Lee D H, Hu H. Tactical berth and yard template design at container transshipment terminals:a column generation based approach. Transportation Research, Part E:Logistics and Transportation Review, 2015, 73:168-184 doi: 10.1016/j.tre.2014.11.009 [6] 王飞跃.平行系统方法与复杂系统的管理和控制.控制与决策, 2004, 19(5):485-489, 514 doi: 10.3321/j.issn:1001-0920.2004.05.002Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control & Decision, 2004, 19(5):485-489, 514 doi: 10.3321/j.issn:1001-0920.2004.05.002 [7] 王飞跃, 刘德荣, 熊刚, 程长建, 赵冬斌.复杂系统的平行控制理论及应用.复杂系统与复杂科学, 2012, 9(3):1-12 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201203001Wang Fei-Yue, Liu De-Rong, Xiong Gang, Cheng Chang-Jian, Zhao Dong-Bin. Parallel control theory of complex systems and applications. Complex Systems and Complexity Science, 2012, 9(3):1-12 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201203001 [8] 王飞跃.平行控制:数据驱动的计算控制方法.自动化学报, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtmlWang Fei-Yue. Parallel control:a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtml [9] Stula M, Stipanicev D, Maras J. Distributed computation multi-agent system. New Generation Computing, 2013, 31(3):187-209 doi: 10.1007/s00354-012-303-8 [10] Frees S. Context-driven interaction in immersive virtual environments. Virtual Reality, 2010, 14(4):277-290 doi: 10.1007/s10055-010-0178-2 [11] Carlo H J, Vis I F A, Roodbergen K J. Storage yard operations in container terminals:literature overview, trends, and research directions. European Journal of Operational Research, 2014, 235(2):412-430 doi: 10.1016/j.ejor.2013.10.054 [12] Liu Q W. Efficiency Analysis of Container Ports and Terminals[Ph.D. dissertation], University College London, London, 2010 [13] Zhen L, Jiang X J, Lee L H, Chew E P. A review on yard management in container terminals. Industrial Engineering & Management Systems, 2013, 12(4):289-304 http://cn.bing.com/academic/profile?id=db4bc6d3ddf5f290c546ba23e391b546&encoded=0&v=paper_preview&mkt=zh-cn [14] Tao J H, Qiu Y Z. A simulation optimization method for vehicles dispatching among multiple container terminals. Expert Systems with Applications, 2015, 42(7):3742-3750 doi: 10.1016/j.eswa.2014.12.041 [15] Vacca I, Salani M, Bierlaire M. Optimization of operations in container terminals:hierarchical vs integrated approaches. In:Proceedings of the 10th SWISS Transport Research Conference. Switzerland, 2010. [16] Cai B H, Huang S D, Liu D K, Yuan S, Dissanayake G, Lau H, et al. Multiobjective optimization for autonomous straddle carrier scheduling at automated container terminals. IEEE Transactions on Automation Science & Engineering, 2013, 10(3):711-725 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a6dafcbdcf9938869e13a2579ba59c26 [17] Lau H Y K, Zhao Y. Integrated scheduling of handling equipment at automated container terminals. International Journal of Production Economics, 2008, 112(2):665-682 doi: 10.1016/j.ijpe.2007.05.015 [18] Yang Y C. Operating strategies of CO2 reduction for a container terminal based on carbon footprint perspective. Journal of Cleaner Production, 2017, 141:472-480 doi: 10.1016/j.jclepro.2016.09.132 [19] Yun W Y, Choi Y S. A simulation model for container-terminal operation analysis using an object-oriented approach. International Journal of Production Economics, 1999, 59(1-3):221-230 doi: 10.1016/S0925-5273(98)00213-8 [20] Dulebenets M A. Application of evolutionary computation for berth scheduling at marine container terminals:parameter tuning versus parameter control. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(1):25-37 doi: 10.1109/TITS.2017.2688132 [21] Speer U, Fischer K. Scheduling of different automated yard crane systems at container terminals. Transportation Science, 2017, 51(1):305-324 doi: 10.1287/trsc.2016.0687 [22] Al-Dhaheri N, Jebali A, Diabat A. A simulation-based Genetic Algorithm approach for the quay crane scheduling under uncertainty. Simulation Modelling Practice & Theory, 2016, 66:122-138 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5295b68b0d3df361df4c9690cd2811dc [23] Tang G L, Wang W Y, Song X Q, Guo Z J, Yu X H, Qiao F F. Effect of entrance channel dimensions on berth occupancy of container terminals. Ocean Engineering, 2016, 117:174-187 doi: 10.1016/j.oceaneng.2016.03.047 [24] Dkhil H, Yassine A, Chabchoub H. Multi-objective optimization of the integrated problem of location assignment and straddle carrier scheduling in maritime container terminal at import. Journal of the Operational Research Society, to be published doi: 10.1057%2Fs41274-017-0184-9 [25] Gharehgozli A H, Vernooij F G, Zaerpour N. A simulation study of the performance of twin automated stacking cranes at a seaport container terminal. European Journal of Operational Research, 2017, 261(1):108-128 doi: 10.1016/j.ejor.2017.01.037 [26] Liang C J, Fan L B, Xu D H, Ding Y, Gen M. Research on coupling scheduling of quay crane dispatch and configuration in the container terminal. Computers & Industrial Engineering, 2018, 125:649-657 http://cn.bing.com/academic/profile?id=314f6fc5b2995f21b6c55af5790f0ae7&encoded=0&v=paper_preview&mkt=zh-cn [27] Xin J B, Negenborn R R, Lodewijks G. Rescheduling of interacting machines in automated container terminals. In:Proceedings of the 19th World Congress the International Federation of Automatic Control. Cape Town, South Africa:IFAC, 2014. 1698-1704 [28] Homayouni S M, Tang S H, Motlagh O. A genetic algorithm for optimization of integrated scheduling of cranes, vehicles, and storage platforms at automated container terminals. Journal of Computational & Applied Mathematics, 2014, 270:545-556 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=6d82689959e2463ebd9ab637310393b0 [29] Yang X M, Mi W J, Li X, An G L, Zhao N, Mi C. A simulation study on the design of a novel automated container terminal. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5):2889-2899 doi: 10.1109/TITS.2015.2425547 [30] Kim K H, Won S H, Lim J K, Takahashi T. An architectural design of control software for automated container terminals. Computers & Industrial Engineering, 2004, 46(4):741-754 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ca2f4c69c9f6a74d857be61799464fd5 [31] Xin J B, Negenborn R R, Lodewijks G. Energy-aware control for automated container terminals using integrated flow shop scheduling and optimal control. Transportation Research, Part C:Emerging Technologies, 2014, 44:214-230 doi: 10.1016/j.trc.2014.03.014 [32] Thurston T, Hu H S. Distributed agent architecture for port automation. In:Proceedings of the 26th Annual International Computer Software and Applications. Oxford, UK:IEEE, 2002. 81-87 [33] Li L, Wang X D. Modeling and simulation of container terminal logistics system. In:Proceedings of the 2009 Second International Workshop on Knowledge Discovery and Data Mining. Moscow, Russia:IEEE, 2009. 729-732 [34] Rebollo M, Julián V, Carrascosa C, Botti V. A multi-agent system for the automation of a port container terminal. In:Proceedings of Autonomous Agents 2000 Workshop on Agents in Industry. 2000. https://www.researchgate.net/publication/2896616_A_Multi-Agent_System_for_the_Automation_of_a_Port [35] 王祥雪, 朱瑾.基于MAS的集装箱自动化码头协同作业系统模型.计算机应用研究, 2013, 30(4):1072-1075 doi: 10.3969/j.issn.1001-3695.2013.04.030Wang Xiang-Xue, Zhu Jin. Multi-agent system based collaborative operation system about ZPMC automatic container terminal. Application Research of Computers, 2013, 30(4):1072-1075 doi: 10.3969/j.issn.1001-3695.2013.04.030 [36] Haramabadi H R. Dynamic Scheduling of Automated Guided Vehicles in Container Terminals[Ph.D. dissertation], University of Essex, England, 2006 [37] Choi H R, Kim H S, Park B J, Park N K, Lee S W. An ERP approach for container terminal operating systems. Maritime Policy & Management, 2003, 30(3):197-210 http://cn.bing.com/academic/profile?id=9ec0583adeeb1d4d129c5b77e6c0e94c&encoded=0&v=paper_preview&mkt=zh-cn [38] Hoshino S, Fujisawa T, Maruyama S, Hino H, Ota J. Double container-handling operation for an efficient seaport terminal system. Intelligent Autonomous Systems, 2008, 10:173-182 [39] 李斌, 杨家其. PID控制框架下的集装箱码头调度算法.交通运输系统工程与信息, 2014, 14(1):124-130 doi: 10.3969/j.issn.1009-6744.2014.01.020Li Bin, Yang Jia-Qi. A scheduling algorithm for container terminals within PID control framework. Journal of Transportation Systems Engineering & Information Technology, 2014, 14(1):124-130 doi: 10.3969/j.issn.1009-6744.2014.01.020 [40] Dragović B, Tzannatos E, Park N K. Simulation modelling in ports and container terminals:literature overview and analysis by research field, application area and tool. Flexible Services & Manufacturing Journal, 2017, 29(1):4-34 http://cn.bing.com/academic/profile?id=51b2621a1a4499ff735a8b4c06e1075f&encoded=0&v=paper_preview&mkt=zh-cn [41] 郑松, 倪维斗.基于数据引擎技术的通用控制站.电气时代, 2008, (9):122-125 doi: 10.3969/j.issn.1000-453X.2008.09.034Zheng Song, Ni Wei-Dou. Data engine based universal controller. Electric Age, 2008, (9):122-125 doi: 10.3969/j.issn.1000-453X.2008.09.034 [42] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1):1-8 doi: 10.3969/j.issn.1003-8930.2015.01.001Wang Fei-Yue. Software-defined systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1):1-8 doi: 10.3969/j.issn.1003-8930.2015.01.001 [43] 王坤峰, 苟超, 王飞跃.平行视觉:基于ACP的智能视觉计算方法.自动化学报, 2016, 42(10):1490-1500 http://www.aas.net.cn/CN/abstract/abstract18936.shtmlWang Kun-Feng, Gou Chao, Wang Fei-Yue. Parallel vision:an ACP-based approach to intelligent vision computing. Acta Automatica Sinica, 2016, 42(10):1490-1500 http://www.aas.net.cn/CN/abstract/abstract18936.shtml [44] 王飞跃.关于复杂系统研究的计算理论与方法.中国基础科学, 2004, 6(5):3-10 doi: 10.3969/j.issn.1009-2412.2004.05.001Wang Fei-Yue. Computational theory and method on complex system. China Basic Science, 2004, 6(5):3-10 doi: 10.3969/j.issn.1009-2412.2004.05.001 [45] 郑松, 倪维斗.分布式控制系统动态重构技术研究与实现.原子能科学技术, 2009, 43(8):724-729 http://d.old.wanfangdata.com.cn/Periodical/yznkxjs200908011Zheng Song, Ni Wei-Dou. Research and implementation of dynamic reconfiguration technology in distributed control system. Atomic Energy Science & Technology, 2009, 43(8):724-729 http://d.old.wanfangdata.com.cn/Periodical/yznkxjs200908011 [46] Zheng S, Zhang Q, Zheng R, Huang B Q, Song Y L, Chen X C. Combining a multi-agent system and communication middleware for smart home control:a universal control platform architecture. Sensors, 2017, 17(9):2135 doi: 10.3390/s17092135 [47] 刘烁, 王帅, 孟庆振, 叶佩军, 王涛, 黄文林, 王飞跃.基于ACP行为动力学的犯罪主体行为平行建模分析.自动化学报, 2018, 44(2):251-261 http://www.aas.net.cn/CN/abstract/abstract19220.shtmlLiu Shuo, Wang Shuai, Meng Qing-Zhen, Ye Pei-Jun, Wang Tao, Huang Wen-Lin, Wang Fei-Yue. Parallel modeling of criminal subjects behavior based on ACP behavioral dynamics. Acta Automatica Sinica, 2018, 44(2):251-261 http://www.aas.net.cn/CN/abstract/abstract19220.shtml [48] Chen D W, Yin J T, Chen L, Xu H Z. Parallel control and management for high-speed maglev systems. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(2):431-440 doi: 10.1109/TITS.2016.2577037 [49] 吴沙坪, 何继红, 罗勋杰.洋山四期自动化集装箱码头装卸工艺设计.水运工程, 2016, (9):159-162, 166 doi: 10.3969/j.issn.1002-4972.2016.09.033Wu Sha-Ping, He Ji-Hong, Luo Xun-Jie. Handling technology design for automated container terminal of Yangshan deepwater port phase Ⅳ project. Port & Waterway Engineering, 2016, (9):159-162, 166 doi: 10.3969/j.issn.1002-4972.2016.09.033 [50] 刘广红, 程泽坤, 罗勋杰, 庄骅, 何继红.洋山四期工程全自动化集装箱码头总体布置.水运工程, 2016, (9):46-51 doi: 10.3969/j.issn.1002-4972.2016.09.010Liu Guang-Hong, Cheng Ze-Kun, Luo Xun-Jie, Zhuang Hua, He Ji-Hong. General layout of fully automated container terminal in phase Ⅳ of Yangshan project. Port & Waterway Engineering, 2016, (9):46-51 doi: 10.3969/j.issn.1002-4972.2016.09.010 [51] 程泽坤, 刘广红, 何继红.洋山港四期全自动化集装箱码头总体布置创新.中国港湾建设, 2016, 36(10):1-7 doi: 10.7640/zggwjs201610001Cheng Ze-Kun, Liu Guang-Hong, He Ji-Hong. Innovation on general layout of fully-automated container terminal in Yangshan Port phase Ⅳ project. China Harbour Engineering, 2016, 36(10):1-7 doi: 10.7640/zggwjs201610001 [52] Li D L, Niu K. Dijkstra's algorithm in AGV. In:Proceedings of the 9th IEEE Conference on Industrial Electronics and Applications. Hangzhou, China:IEEE, 2014. 1867-1871 [53] Gayathri N, Chandrakala K R M V. A novel technique for optimal vehicle routing. In:Proceedings of the 2014 International Conference on Electronics and Communication Systems. Coimbatore, India:IEEE, 2014. 1-5 -

 下载:
下载:




图(12) / 表(1)
计量
- 文章访问数: 2728
- HTML全文浏览量: 783
- PDF下载量: 734
- 被引次数: 0
