

A Preferential Growing Evolution-model of Terrorist Networks Based on Multi-local Network
-
摘要: 恐怖组织网络是一种特殊的复杂网络,其时空演化规律反映出恐怖组织活动的特征.为更准确地理解恐怖组织网络的动态演化规律,提出一种基于多局域的恐怖组织网络择优增长演化模型,并对此模型进行了仿真与模拟.该模型能准确地描述在局部信息条件下,新节点的择优和网络的增长过程及其规律;并且利用网络信息中心度来衡量恐怖组织网络节点的信念水平,动态地刻画了恐怖组织网络的增长过程.实验结果表明:恐怖组织网络的局域度分布仍服从幂律分布,网络信息中心度具有集中与分散性的特征;最后,对多个恐怖组织网络按该模型进行仿真演化,验证了该模型的准确性与科学性.Abstract: The network of terrorist organizations is a special complex network, and its spatiotemporal evolution process reflects the characteristics of terrorist organization activities. To more accurately depict the dynamic evolution process of terrorist network, this paper puts forward a preferential-growing evolution model of terrorist networks based on the multi-local network, and the model is simulated. The model can accurately describe the growth of new nodes and the growth process of network under the condition of local information. We use the node network information center degree to measure the level of terrorist beliefs, dynamic characterization of a terrorist network growth process. The experimental results show:in the terrorist networks, the degree distribution of local network follows the power-law distribution, the network information center degree of the nodes of local network has the characteristics of centralized and decentralized. Finally, the model is verified with the data of terrorist networks. The verification results show that the model is accurate.
-
Key words:
- Terrorist networks /
- preferential-growth /
- multi-local network /
- information center degree /
- power law distribution
-
近年来, 多传感器信息融合技术得到广泛关注.经典Kalman滤波需要已知模型参数和噪声统计特性[1].而在实际应用中, 系统可能会出现模型参数或噪声统计特性未知情况.文献[2-4]研究了带未知噪声方差系统的自校正估计问题.文献[5]和[6]研究了模型参数和噪声方差未知系统的自校正融合估计问题.文献[7]针对带未知模型参数和噪声统计特性且噪声相关的多传感器系统, 分别应用RELS算法、Gevers-Wouters算法对未知模型参数和噪声统计特性进行辨识, 并提出了自校正融合估值器.文献[5-7]中在对未知模型参数进行融合处理时, 采用加权平均方法获得最终融合辨识器.该方法没有考虑不同传感器的局部参数辨识的差异, 不能保证融合后的参数估计精度都优于每个局部参数估计.上述文献所提出的辨识和估计算法都是基于完整的传感器观测数据, 而没有考虑数据的不完整现象.
在实际的网络化系统或传感器网络中, 由于传感器老化或故障、以及传感器的观测数据在通信传输过程中由于带宽有限, 可能会出现数据丢失、衰减、延迟等问题, 使得估值器所收到的传感器数据具有不完整现象[8].文献[9]研究了带多丢包系统的最优估计问题.文献[10]将文献[9]的单传感器系统推广到了多传感器系统, 对带有不同丢包率的多传感器系统, 提出了集中式和分布式融合估值器.文献[11-14]考虑数据在传输过程中存在的丢失和延迟现象, 设计了相应的最优估值器.其中文献[13]在文献[12]的基础上研究了带随机乘性噪声、多丢包和滞后系统的最优估计问题.文献[14]考虑了过程噪声和观测噪声具有一步自相关和互相关的情况.文献[15]和[16]对带有数据包丢失的多传感器系统, 应用协方差信息方法设计了分布式融合估值器.在上述文献[9-17]中数据丢失现象均由一组满足伯努利分布的随机变量所描述, 这种数据丢失可以看作是观测数据发生衰减现象的一种特殊情况.文献[18]和[19]考虑了带随机参数矩阵、相关噪声和衰减观测系统的最优和次优估计问题.文献[20]中研究了带衰减观测系统的Kalman滤波估计问题, 同时分析了误差协方差的有界性和稳态特性.文献[21-22]对带衰减观测的随机不确定系统, 分别设计了多传感器分布式和序贯融合估值器.上述文献都是在假设观测丢失率或衰减率已知的情况下得到的最优估计结果.而没有考虑观测丢失率或衰减率未知的自校正估计问题.目前, 有关同时考虑带有未知模型参数和未知衰减观测率多传感器系统的自校正融合估计问题的报导甚少.
基于以上文献分析, 本文将对带有未知模型参数和衰减观测率的多传感器随机系统, 应用相关函数和递推增广最小二乘算法, 分别在线辨识衰减观测的数学期望、方差和模型参数.应用线性无偏最小方差估计准则, 分别提出了分布式模型参数融合辨识器和自校正融合状态滤波器, 并分析算法的收敛性.
1. 问题阐述
考虑带衰减观测的多传感器随机系统
$$ \begin{equation} {\boldsymbol x(t+1)} = {\Phi}{\boldsymbol x(t)}+{\Gamma}{\boldsymbol w}(t) \end{equation} $$ (1) $$ \begin{equation} {{y}_{i}}(t) = {\mu_{i}(t)}{ h_{i}}{\boldsymbol x}(t)+{v_{i}(t)}, \ i = 1, 2, \cdots, L \end{equation} $$ (2) 其中状态$ \boldsymbol x(t)\in {\bf R}^n $, 观测$ {{y}_{i}}(t)\in {{\bf R}} $, 过程噪声$ \boldsymbol w(t)\in {\bf R}^r $, 观测噪声$ {{v}_{i}}(t)\in {{\bf R}} $, 下标$ i $表示第$ i $个传感器, $ L $表示传感器的个数. $ \left\{ {{\mu _i}(t)} \right\} $为一组在${[0, 1]}$区间取值的用来描述第$ i $个传感器衰减观测现象的标量随机变量.其中$ {\rm E}{[\mu_{i}(t)] = \alpha_{i}} $, $ {\rm Cov}[\mu_{i}(t)] = \sigma_{i}^2 $, $ {\rm E} $为数学期望符号, $ {\rm Cov} $为协方差符号. $ \left\{ {{\mu _i}(t)} \right\} $与其他随机变量不相关. $ \Phi $, $ \Gamma $, $ { h_{i}} $是适当维数矩阵.
假设1. $ {\boldsymbol w}(t) $和$ {v_{i}(t)} $为零均值、方差阵分别为$ Q_{{\boldsymbol w}} $和$ Q_{v_{i}} $的不相关白噪声.
假设2. 初值$ {\boldsymbol x(0)} $不相关于$ {\boldsymbol w}(t) $和$ {v_{i}(t)} $, 且$ {\rm{E}}\left\{ {\boldsymbol x(0)} \right\} = {\boldsymbol u_0}, {\rm{E}}\left\{ {\left[{\boldsymbol x(0) - {\boldsymbol u_0}} \right]{{\left[{\boldsymbol x(0) - {\boldsymbol u_0}} \right]}^{\rm{T}}}} \right\} = {P_0} $.其中$ {\rm T} $为转置号.
假设3. $ \Phi $为稳定矩阵, ($ \Phi, { h_{i}} $)是完全可观对, ($ \Phi, \Gamma $)是完全可控对.
假设4. $ \Phi $中部分参数未知, $ \left\{ {{\mu _i}(t)} \right\} $的数学期望$ {\alpha_i} $和方差$ \sigma_{i}^2 $未知.
问题是基于观测$ ({y}_{i}(1), \cdots, {y}_{i}(t)) $, $ i = 1, 2, $ $ \cdots, L $, 辨识$ \Phi $中未知参数、$ \left\{ {{\mu _i}(t)} \right\} $的数学期望$ {\alpha_i} $和方差$ \sigma_{i}^2 $, 并求$ \Phi $中未知参数的融合辨识器$ {{\rm{\hat \Phi }}_o}(t) $和状态$ {\boldsymbol x(t)} $的自校正融合滤波器$ {\hat{\boldsymbol {x}}_s(t|t)} $.
注1. 为了阅读方便, 这里对后文中经常遇到一些术语给予解释.局部滤波器, 即基于单个传感器的观测数据所获得的滤波器; 最优滤波器, 即系统的模型参数以及衰减观测期望和方差已知情况下, 获得的线性最小方差意义下的滤波器; 自校正滤波器, 即系统模型含有未知参数, 以及衰减观测期望和方差未知情况下, 通过辨识这些未知参数, 然后代入最优滤波算法中获得的滤波器.分布式融合滤波器, 即基于各个传感器的局部滤波器, 应用线性无偏最小方差矩阵加权融合估计算法[23]获得的融合滤波器.
2. 分布式最优融合滤波
当系统模型参数、$ \left\{ {{\mu _i}(t)} \right\} $的数学期望$ {\alpha_i} $和方差$ \sigma_{i}^2 $已知时, 应用线性无偏最小方差意义下的矩阵加权融合估计算法[23]可获得分布式最优融合滤波器.下面给出实现过程.
由式(2)可得
$$ \begin{equation} {{y}_{i}}(t) = {\alpha_i}{ h_{i}}{\boldsymbol x(t)}+{V_i(t)} \end{equation} $$ (3) 其中
$$ \begin{equation} {V_i(t)} = (\mu_{i}(t)-{\alpha_i}){h_{i}}{\boldsymbol x(t)}+v_i(t) \end{equation} $$ (4) 可计算其方差阵为
$$ \begin{equation} Q_{{V_i(t)}} = {\rm E}[V_i^2(t)] = {{{\sigma}}_{i}^2}{ h_{i}}X(t){ h_{i}^{\rm T}}+Q_{v_i} \end{equation} $$ (5) 状态二阶矩$ X(t) = {\rm E}[{\boldsymbol x}(t){\boldsymbol x}^{\rm T}(t)] $可递推计算如下:
$$ \begin{equation} X(t + 1) = {\rm{\Phi }}X(t){{\rm{\Phi }}^{\rm{T}}} + {\rm{\Gamma }}{Q_{\boldsymbol w}}{{\rm{\Gamma }}^{\rm{T}}} \end{equation} $$ (6) 初值为$ X(0) = {\boldsymbol \mu_0}{\boldsymbol \mu}_0^{\rm{T}}+ {P_0} $.由假设3可知$ X(t) $有界.
下面引理1给出了最优局部滤波器算法; 引理2给出了互协方差计算公式; 引理3给出了分布式最优加权融合滤波算法.
引理1[24]. 在假设1$ \sim $3下, 随机系统(1)和(3)基于每个传感器的观测有最优局部滤波器
$$ \begin{equation} {\hat {\boldsymbol x}_i}(t + 1|t + 1) = {\Psi _{fi}}(t + 1){\hat {\boldsymbol x}_i}(t|t)+{{K}_i}(t + 1){{ y}_i}(t + 1) \end{equation} $$ (7) $$ \begin{equation} {{ K}_i}(t + 1) = {\Sigma _i}(t + 1|t) F_i^{\rm{T}}Q_{{{{C}}_i}}^{ - 1}(t + 1) \end{equation} $$ (8) $$ \begin{equation} {\Sigma _i}(t + 1|t) = \Phi {P_i}(t|t){\Phi ^{\rm{T}}} + \Gamma {Q_{\boldsymbol w}}{\Gamma ^{\rm{T}}} \end{equation} $$ (9) $$ \begin{equation} {Q_{{{{C}}_i}}}(t + 1) = { F_i}{\Sigma _i}(t + 1|t)F_i^{\rm{T}} + {Q_{{V_i}}}(t + 1) \end{equation} $$ (10) $$ \begin{equation} {P_i}(t + 1|t + 1) = [{I_n} - {{ K}_i}(t + 1){ F_i}]{\Sigma _i}(t + 1|t) \end{equation} $$ (11) 其中$ { F_i} = {\alpha _i}{ h_i}, {\Psi _{fi}}(t + 1) = {\rm{[}}{I_n}-{{ K}_i}(t + 1){F_i}]\Phi $. $ {\hat {\boldsymbol x}_i}(t|t) $为第$ i $个传感器的局部滤波器, $ {K_i}(t + 1) $为相应的滤波增益, $ {P_i}(t|t) $为滤波误差方差阵.初值为$ {\hat {\boldsymbol x}_i}(0|0) = {\boldsymbol u_0}, {P_i}(0|0) = {P_0} $.
引理2[24]. 任意两个局部滤波误差之间的互协方差阵$ {P_{ij}}(t|t) = {\rm E}[{\tilde {\boldsymbol x}_i}(t|t)\tilde {\boldsymbol x}_j^{\rm T}(t|t)] $ (其中滤波误差$ {\tilde {\boldsymbol x}_i}(t|t) = {\boldsymbol x}(t)-{\hat {\boldsymbol x}_i}(t|t) $)可递推计算如下:
$$ \begin{align} {P_{ij}}&(t + 1|t + 1) = [{I_n} - { K_i}(t + 1){ F_i}]\times \\ &[\Phi{P_{ij}}(t|t){\Phi ^{\rm{T}}} + \Gamma {Q_{\boldsymbol w}}{\Gamma ^{\rm{T}}}]{[{I_n} - { K_j}(t + 1){ F_j}]^{\rm{T}}} \end{align} $$ (12) 初值为$ {P_{ij}}(0|0) = {P_0} $.
引理3[23]. 基于引理1的各局部滤波器和引理2的任意两个局部滤波误差之间的互协方差阵, 分布式最优矩阵加权融合滤波器可计算如下:
$$ \begin{equation} {\hat {\boldsymbol x}_o}(t|t) = \sum\limits_{i = 1}^L {W_i^{}(t){{\hat {\boldsymbol x}}_i}(t|t)} \end{equation} $$ (13) 加权矩阵计算为
$$ \begin{equation} [W_1^{}(t), \cdots , W_L^{}(t)]{\kern 1pt} {\kern 1pt} {\kern 1pt} = {(e_{}^{\rm{T}}P_{}^{ - 1}(t|t)e)^{ - 1}}e_{}^{\rm{T}}P_{}^{ - 1}(t|t) \end{equation} $$ (14) 其中$ e = [I_{n}, \cdots, I_{n}]^{\mathrm{T}}, P(t|t) = {\left[{{P_{ij}}(t|t)} \right]_{nL \times nL}} $是以$ {P_{ij}}(t|t) $为第$ (i, j) $元素的分块矩阵.融合滤波器的估计误差方差阵计算为
$$ \begin{equation} {P_o}(t|t) = {(e_{}^{\rm T}P_{}^{ - 1}(t|t)e)^{ - 1}} \end{equation} $$ (15) 且有$ {P_o}(t|t) \le {P_i}(t|t), i = 1, \cdots, L. $
3. 未知模型参数融合辨识器
上一节我们针对系统模型精确已知时给出了分布式最优融合估计算法.而在实际应用中, 系统模型可能含有未知参数.当$ \Phi $中含有未知参数时, 本节采用RELS算法辨识未知模型参数, 并对辨识得到的$ L $组参数估值进行加权融合, 获得模型参数的分布式融合辨识器.下面给出具体实现过程.
由式(1)可得
$$ \begin{equation} {\boldsymbol x}(t) = {({I_n} - {q^{ - 1}}\Phi )^{ - 1}}{q^{ - 1}}\Gamma {\boldsymbol w}(t) \end{equation} $$ (16) 式中$ q^{-1} $为单位滞后算子, 即$ {q^{ - 1}}{\boldsymbol x}(t) = {\boldsymbol x}(t - 1) $.将式(16)代入式(3)得
$$ \begin{equation} {y_i}(t) = {\alpha _i}{ h_i}{({I_n} - {q^{ - 1}}\Phi )^{ - 1}}{q^{ - 1}}\Gamma {\boldsymbol w}(t) + {V_i}(t) \end{equation} $$ (17) 将式(17)进一步化简得
$$ \begin{equation} A({q^{ - 1}}){ y_i}(t) = {\alpha _i}{B_i}({q^{-1}}){\boldsymbol w}(t)+ A({q^{ - 1}}){V_i}(t) \end{equation} $$ (18) 其中$ A({q^{-1}}) = \det ({I_n}-{q^{ - 1}}\Phi), {B_i}({q^{ - 1}}) = { h_i}{\rm{adj}}({I_n}-{q^{ - 1}}\Phi){q^{ - 1}}\Gamma $, 式中det和adj分别表示矩阵行列式和伴随矩阵. $ A(q^{-1}) $和$ B_i(q^{-1}) $具有如下多项式形式:
$$ \begin{equation} A({q^{ - 1}}) = 1 + {a_1}{q^{ - 1}} + \cdots + {a_{{n_a}}}{q^{ - {n_a}}} \end{equation} $$ (19) $$ \begin{equation} {B_i}({q^{ - 1}}) = {B_{i1}}{q^{ - 1}} + \cdots + {B_{i{n_{{B_i}}}}}{q^{ - {n_{{B_i}}}}} \end{equation} $$ (20) 其中$ {a_k}, k = {\rm{1}}, \cdots, {n_a} $和$ {B_{ik}}, k = {\rm{1}}, \cdots, {n_{{B_i}}} $是多项式系数. $ n_A, n_{B_i} $分别为$ A(q^{-1}) $和$ B_i(q^{-1}) $的阶次.式(18)等号右侧两个滑动平均过程可以等价为一个稳定的滑动平均过程$ {D_i}({q^{ - 1}}){\varepsilon _i}(t) $[24], 即
$$ \begin{equation} {D_i}({q^{ - 1}}){\varepsilon _i}(t) = {\alpha _i}{B_i}({q^{ - 1}}){\boldsymbol w}(t) + A({q^{ - 1}}){V_i}(t) \end{equation} $$ (21) 其中$ {\varepsilon _i}(t) $是零均值且带有未知噪声方差$ \sigma _{{\varepsilon _i}}^2 $的白噪声, $ {D_i}({q^{ - 1}}) $具有如下多项式形式:
$$ \begin{equation} {D_i}({q^{ - 1}}) = 1 + {d_{i1}}{q^{ - 1}} + \cdots + {d_{i{n_{{D_i}}}}}{q^{ - {n_{{D_i}}}}} \end{equation} $$ (22) 其中$ {d_{ik}}, k = 1, \cdots, {n_{{D_i}}} $是多项式$ {D_i}({q^{ - 1}}) $的系数, $ {n_{{D_i}}} $是$ {D_i}({q^{ - 1}}) $的阶次.
将式(18)重写为
$$ \begin{equation} A({q^{ - 1}}){y_i}(t) = {D_i}({q^{ - 1}}){\varepsilon _i}(t) \end{equation} $$ (23) 令$ \varphi _i^{\rm{T}}(t) = [-{y_i}(t- 1), \cdots, -{y_i}(t- {n_a}), {\hat \varepsilon _i}(t - 1), \cdots, {\hat \varepsilon _i}(t -{n_{{D_i}}})], {\vartheta _i} = [{a_1}, \cdots, {a_{{n_a}}}, {d_{i1}}, \cdots, {d_{i{n_{{D_i}}}}}{{\rm{]}}^{\rm{T}}} $, 则式(23)可表示为
$$ \begin{equation} {y_i}(t) = \varphi _i^{\rm{T}}(t){\vartheta _i} + {\varepsilon _i}(t) \end{equation} $$ (24) 参数$ {a_k}, k = 1, \cdots, {n_a}; {d_{ik}}, k = 1, \cdots, {n_{{D_i}}} $未知.
基于每个单传感器的观测数据, 应用RELS算法[24]可得到局部参数估计为
$$ \begin{equation} {\hat \vartheta _i}(t + 1) = {\hat \vartheta _i}(t) + {M_i}(t + 1){\hat \varepsilon _i}(t{\rm{ + }}1) \end{equation} $$ (25) $$ \begin{equation} {\hat \varepsilon _i}(t + 1) = {y_i}(t + 1) - \varphi _i^{\rm{T}}(t + 1){\hat \vartheta _i}(t) \end{equation} $$ (26) $$ \begin{equation} {M_i}(t + 1) = \frac{{{Z_i}(t){\varphi _i}(t + 1)}}{{1 + \varphi _i^{\rm{T}}(t + 1){Z_i}(t){\varphi _i}(t + 1)}} \end{equation} $$ (27) $$ \begin{equation} {Z_i}(t + 1) = [{I_{{n_a} + {n_{{D_i}}}}} - {M_i}(t + 1)\varphi _i^{\rm{T}}(t + 1)]{Z_i}(t) \end{equation} $$ (28) 代初值$ {\hat \vartheta _i}{\rm{(}}0) = 0, \; {Z_i}(0) = {\beta _i}I, {\beta _i} $为充分大的正数, 且规定$ {\hat \varepsilon _i}(j) = 0, \; {y_i}(j) = 0\; (j \le 0) $.
由文献[24]可知, RELS算法参数估计是一致的, 即$ {\hat \vartheta _i}(t) \to {\vartheta _i}, t \to \infty, w.p.1 $.符号"$ w.p.1. $"表示"以概率1".
由式(25)可得基于单传感器的局部参数估计误差$ {\tilde \vartheta _i}(t) = {\vartheta _i} - {\hat \vartheta _i}(t) $满足如下方程:
$$ \begin{align} {\tilde \vartheta _i}(t + 1) = \, & [{I_{{n_A} + {n_{{D_i}}}}} - {M_i}(t + 1)\varphi _i^{\rm{T}}(t + 1)]{\tilde \vartheta _i}(t) -\\ & {M_i}(t + 1){\varepsilon _i}(t + 1) \end{align} $$ (29) 于是, 任意两个局部参数估计之间的估计误差协方差阵$ {P_{{\vartheta _{ij}}}}(t) = {\rm{E}}[{\tilde \vartheta _i}(t)\tilde \vartheta _j^{\rm{T}}(t)] $可计算如下:
$$ \begin{align} {P_{{\vartheta _{ij}}}}(t + 1) = \, &[{I_{{n_A} + {n_{{D_i}}}}} - {M_i}(t + 1)\varphi _i^{\rm{T}}(t + 1)]{P_{{\vartheta _{ij}}}}(t) \\ &{[{I_{{n_A} + {n_{{D_j}}}}} - {M_j}(t + 1)\varphi _j^{\rm{T}}(t + 1)]^{\rm{T}}} +\\ & {M_i}(t + 1)\hat \sigma _{{\varepsilon _{ij}}}^2(t + 1)M_j^{\rm{T}}(t + 1) \end{align} $$ (30) 当$ i = j $时, $ {P_{{\vartheta _{ii}}}}(t) $即为局部参数估计误差方差阵$ {P_{{\vartheta _i}}}(t) $. $ {\varepsilon _i}(t) $与$ {\varepsilon _j}(t) $之间的互协方差$ \sigma _{{\varepsilon _{ij}}}^2 $可近似计算如下:
$$ \begin{equation} \hat \sigma _{{\varepsilon _{ij}}}^2(t) = \frac{1}{t}\sum\limits_{k = 1}^t {\hat \varepsilon _i^{}(k)\hat \varepsilon _j^{}(k)} \end{equation} $$ (31) 它可递推地计算为
$$ \begin{equation} \hat \sigma _{{\varepsilon _{ij}}}^2(t) = \hat \sigma _{{\varepsilon _{ij}}}^2(t - 1) + \frac{1}{t}[\hat \varepsilon _i^{}(t)\hat \varepsilon _j^{}(t) - \hat \sigma _{{\varepsilon _{ij}}}^2(t - 1)] \end{equation} $$ (32) 初值为$ \hat \sigma _{{\varepsilon _{ij}}}^2(0) = {y_i}(0){y_j}(0), i, j = 1, \cdots, L $.
令$ {\vartheta _A} = {[{a_1}, \cdots, {a_{{n_a}}}]^{\rm{T}}} $, 则有$ {\vartheta _{A_i}} = [{I_{{n_a}}}, 0]{\vartheta _i} $.于是, 我们有参数$ {\vartheta _A} $基于传感器$ i $的局部估计和估计误差协方差阵如下:
$$ \begin{equation} {\hat \vartheta _{Ai}}(t) = [{I_{{n_a}}}, 0]{\hat \vartheta _i}(t) \end{equation} $$ (33) $$ \begin{equation} {P_{{\vartheta _{Aij}}}}(t) = [{I_{{n_a}}}, 0]{P_{{\vartheta _{ij}}}}(t){[{I_{{n_a}}}, 0]^{\rm{T}}} \end{equation} $$ (34) 当$ i = j $时, $ {P_{{\vartheta _{Aii}}}}(t) $即为局部参数$ {\vartheta _A} $的估计误差方差阵$ {P_{{\vartheta _{Ai}}}}(t) $.
由式(18)可知, 参数$ {\vartheta _A} = {[{a_1}, \cdots, {a_{{n_a}}}]^{\rm{T}}} $是$ \Phi $中未知参数的函数.假设$ \Phi $中未知模型参数组成的列向量为$ {\Lambda ^{[{\rm{\Phi }}]}} \in {{\boldsymbol{\rm R}}^{{n_\Phi }}}, {n_\Phi } \le {n_a} $, 且可由$ {\vartheta _A} $唯一确定.设${\Lambda ^{[{\rm{\Phi }}]}}$与${\vartheta _A}$之间满足如下关系:
$$ \begin{equation} {\Lambda ^{[{\rm{\Phi }}]}} = f({\vartheta _A}) \end{equation} $$ (35) 其中$ f({\vartheta _A}) $为关于$ {\vartheta _A} $的线性或非线性函数.
1) 如果$ f({\vartheta _A}) $是线性函数, 我们将式(35)重写为
$$ \begin{equation} {\Lambda ^{{\rm{[\Phi }}]}} = S{\vartheta _A} + \gamma \end{equation} $$ (36) 式中$ S, \gamma $为适当维数的系数阵.
那么, 基于传感器$ i $的数据获得的$ \Phi $中未知模型参数在$ t $时刻的局部估计为
$$ \begin{equation} \hat \Lambda _i^{[{\rm{\Phi }}]}(t) = S{\hat \vartheta _{Ai}}(t) + \gamma \end{equation} $$ (37) 定义局部估计误差方差$ {P_{\Lambda _i^{[{\rm{\Phi }}]}}}(t) = {\rm{E}}[\tilde \Lambda _i^{[{\rm{\Phi }}]}(t){(\tilde \Lambda _i^{[{\rm{\Phi }}]}(t))^{\rm{T}}}] $, 任意两个局部参数估值器之间的估计误差互协方差为$ {P_{\Lambda _{ij}^{[{\rm{\Phi }}]}}}(t) = {\rm{E}}[\tilde \Lambda _i^{{\rm{[\Phi }}]}(t){(\tilde \Lambda _j^{[{\rm{\Phi]}}}(t))^{\rm{T}}}] $, 其中估计误差$ \tilde \Lambda _i^{[\Phi]}(t) = \Lambda _{}^{[\Phi]} - \hat \Lambda _i^{[\Phi]}(t) = S{\tilde \vartheta _{Ai}}(t) $, 则可获得
$$ \begin{equation} {P_{\Lambda _i^{[{\rm{\Phi }}]}}}(t) = S{P_{{\vartheta _{Ai}}}}(t){S^{\rm{T}}}, {P_{\Lambda _{ij}^{[{\rm{\Phi }}]}}}(t) = S{P_{{\vartheta _{Aij}}}}(t){S^{\rm{T}}} \end{equation} $$ (38) 2) 如果$ f({\vartheta _A}) $是非线性函数, 我们将$ f({\vartheta _A}) $在点$ {\hat \vartheta _{Ai}}(t - 1) $处进行线性化, 有
$$ \begin{equation} \Lambda _i^{[\Phi ]}(t) \approx S({\hat \vartheta _{Ai}}(t - 1)){\vartheta _A} + \gamma ({\hat \vartheta _{Ai}}(t - 1)) \end{equation} $$ (39) 那么, 基于传感器$ i $的数据获得的$ \Phi $中未知模型参数在$ t $时刻的局部估计为
$$ \begin{equation} \hat \Lambda _i^{[\Phi ]}(t) \approx S({\hat \vartheta _{Ai}}(t - 1)){\hat \vartheta _{Ai}}(t) + \gamma ({\hat \vartheta _{Ai}}(t - 1)) \end{equation} $$ (40) 类似地, 可以得到相应的估计误差方差$ {P_{\Lambda _i^{[{\rm{\Phi }}]}}}(t) $和互协方差$ P_{ij}^{{\Lambda ^{[{\rm{\Phi }}]}}}(t) $分别为
$$ \begin{align} &{P_{\Lambda _i^{[{\rm{\Phi }}]}}}(t) = S({\hat \vartheta _{Ai}}(t - 1)){{{P}}_{{\vartheta _{Ai}}}}(t){S^{\rm{T}}}({\hat \vartheta _{Ai}}(t - 1)) \\ &{P_{\Lambda _{ij}^{[{\rm{\Phi }}]}}}(t) = S({\hat \vartheta _{Ai}}(t - 1)){P_{{\vartheta _{Aij}}}}(t){S^{\rm{T}}}({\hat \vartheta _{Aj}}(t - 1)) \end{align} $$ (41) 其中$ i, j = 1, \cdots, L $.通过以上算法, 基于$ L $个传感器的数据可获得$ \Phi $中未知参数在时刻$ t $处的局部估值$ \hat \Lambda _i^{[\Phi]}(t), i, j = 1, \cdots, L $.由于对$ \Phi $中未知参数估计了$ L $次, 因此我们可应用线性无偏最小方差加权融合估计算法[23]将它们进行融合处理.下面定理1给出了未知参数分布式融合估计的结果.
定理1. 基于局部参数估计$ \hat \Lambda _i^{[{\rm{\Phi }}]}(t) $、局部参数估计误差方差阵$ {P_{\Lambda _i^{[{\rm{\Phi }}]}}}(t) $, 以及参数估计误差互协方差$ {P_{\Lambda _{ij}^{[{\rm{\Phi }}]}}}(t) $, 可得在线性无偏最小方差意义下的矩阵加权参数融合辨识器如下:
$$ \begin{equation} \hat \Lambda _o^{{\rm{[\Phi ]}}}(t) = \sum\limits_{i = 1}^L {{W_{\Lambda _i^{{\rm{[\Phi }}]}}}(t)\hat \Lambda _i^{[{\rm{\Phi }}]}(t)} \end{equation} $$ (42) 参数融合加权矩阵计算为
$$ \begin{align} [{W_{\Lambda _i^{[{\rm{\Phi }}]}}}(t), &\cdots , {W_{\Lambda _L^{[{\rm{\Phi }}]}}}(t)] = \\ &{(e_{{\Lambda ^{[\Phi ]}}}^{\rm{T}}P_{{\Lambda ^{[\Phi ]}}}^{ - 1}(t){e_{{\Lambda ^{[\Phi ]}}}})^{ - 1}}e_{{\Lambda ^{[\Phi ]}}}^{\rm{T}}P_{{\Lambda ^{[\Phi ]}}}^{ - 1}(t) \end{align} $$ (43) 其中$ {e_{{\Lambda ^{[\Phi]}}}} = {[{\begin{array}{*{20}{c}} {{I_{{n_\Phi }}}} & \cdots & {{I_{{n_\Phi }}}} \\ \end{array}}]^{\rm T}}_{{n_\Phi }L \times {n_\Phi }}, {P_{{\Lambda ^{[\Phi]}}}}(t) = {[{{P_{\Lambda _{ij}^{[{\rm{\Phi }}]}}}(t|t)}]_{{n_\Phi }L \times {n_\Phi }L}} $是以$ {P_{\Lambda _{ij}^{[{\rm{\Phi }}]}}}(t|t) $为第$ (i, j) $元素的分块矩阵.
参数融合辨识器的估计误差方差阵计算为
$$ \begin{equation} {P_{\Lambda _o^{[{\rm{\Phi }}]}}}(t) = {(e_{{\Lambda ^{[\Phi ]}}}^{\rm{T}}P_{{\Lambda ^{[\Phi ]}}}^{ - 1}(t){e_{{\Lambda ^{[\Phi ]}}}})^{ - 1}} \end{equation} $$ (44) 且$ {P_{\Lambda _o^{{\rm{[\Phi]}}}}}(t) \le {P_{\Lambda _i^{[{\rm{\Phi }}]}}}(t), i = 1, \cdots, L. $
基于以上算法可以获得未知模型参数融合辨识器$ \Lambda _o^{[{\rm{\Phi]}}}(t) $, 进而可获得$ \Phi $的融合估值$ {{\rm{\hat \Phi }}_o}(t) $.由前面的分析, 有$ {\hat \Phi _o}(t) \to \Phi, t \to \infty, w.p.1 $.
注2. 文献[5-7, 24]在进行模型参数融合辨识时, 将各传感器辨识得到的模型参数采用加权平均方法进行融合处理.该方法不能保证所获得的参数融合辨识器的估计精度不低于所有的局部参数估计.而本文采用线性无偏最小方差分布式矩阵加权融合算法[23]对各传感器辨识得到的参数进行融合处理.所获得的参数融合辨识器的估计精度不低于所有的局部参数估计.因此, 本文的矩阵加权融合的参数估计精度高于加权平均融合的参数估计精度.这在后面的仿真研究中也能看到.
4. $ \boldsymbol {\mu _i(t)} $的数学期望与方差辨识
当各传感器的衰减观测率未知时, 为了能应用第2节中的算法获得状态估计, 我们需要辨识描述衰减观测的随机变量$ \{ {\mu _i}(t)\} $的均值和方差.下面我们采用相关函数来辨识它们.
将模型参数融合辨识器$ {\hat \Phi _o}(t) $代入式(6)中, 得到
$$ \begin{equation} \hat X(t + 1) = {\hat \Phi _o}(t) \hat X(t)\hat \Phi _o^{\rm{T}}(t) + {\rm{\Gamma }}{Q_{\boldsymbol w}}{{\rm{\Gamma }}^{\rm{T}}} \end{equation} $$ (45) 由式(2)可计算零步相关函数$ R_i(t, 0) = {\rm E}[y_i^2(t)] $为
$$ \begin{equation} {R_i}(t, 0) = (\alpha _i^2 + \sigma _i^2){h_{i}}{{\hat X}}(t)h_{i}^{\rm{T}} + {{{Q}}_{{v_i}}} \end{equation} $$ (46) 一步相关函数$ {{{R}}_i}(t, {\rm{1}}) = {\rm{E}}[{y_i}(t){y_i}(t- {\rm{1}})] $为
$$ \begin{equation} {R_i}(t, 1) = \alpha _i^2{ h_{i}}{\hat \Phi _o}(t - 1)\hat X(t - 1) h_{i}^{\rm{T}} \end{equation} $$ (47) 零阶和一阶相关函数阵$ {{{R}}_i}(t, r), r = 0, {\rm{1}} $可通过如下采样相关函数$ {{{\hat R}}_i}(t, r) $逼近:
$$ \begin{align} {\hat R_i}(t, r) \approx &\frac{1}{t}\sum\limits_{s = 1}^t {{{ y}_i}(s){{y}_i}(s - r)} = {\hat R_i}(t - 1, r) + \\ & \frac{1}{t}[{y_i}(t){y_i}(t - r) - {\hat R_i}(t - 1, r)] \end{align} $$ (48) 初值为$ {{{\hat R}}_i}(0, 0) = {\rm E}[y_i^2{\rm{(0)]}}, \; {{{\hat R}}_i}(0, 1){\rm{ = 0}} $.
最后, 由式(47)可求出随机变量$ {\rm{\{ }}{\mu _i}{\rm{(}}t{\rm{)\} }} $的数学期望为
$$ \begin{equation} {\hat \alpha _i}(t) = \sqrt {\frac{{{{\hat R}_i}(t, 1)}}{{{{ h}_i}{{\hat \Phi }_o}(t - 1)\hat X(t - 1){ h}_i^{\rm{T}}}}} \end{equation} $$ (49) 将式(49)代入式(46)可得随机变量$ {\rm{\{ }}{\mu _i}{\rm{(}}t{\rm{)\} }} $的方差为
$$ \begin{equation} \hat \sigma _i^2(t) = \frac{{{{\hat R}_i}(t, 0) - {{{Q}}_{{v_i}}}}}{{ {h_{i}}{{\hat X}}(t)h_{i}^{\rm{T}}}} - \hat \alpha _i^2(t) \end{equation} $$ (50) 通过式(49)可获得$ {\alpha _i} $在$ t $时刻的估值.由第3节可知$ {\hat \Phi _o}(t) \to \Phi, t \to \infty $.由$ \Phi $的稳定性和式(45)可得$ \hat X(t) \to X(t), t \to \infty $.又由随机过程的遍历性可得$ {{{\hat R}}_i}(t, r) \to {{{R}}_i}(t, r), t \to \infty $.因而, 有估值$ {\hat \alpha _i}(t) $, $ \hat \sigma _i^2(t) $具有一致性, 即
$$ \begin{equation} {\hat \alpha _i}(t) \to {\alpha _i}, \hat \sigma _i^2(t) \to \sigma _i^2, t \to \infty , w.p.1 \end{equation} $$ (51) 进一步, 有$ {\hat Q_{{V_i}}}(t) = \hat \sigma _i^2(t){{{{ h}}}_i}\hat X(t){{ h}_i^{\rm{T}}} + {Q_{{v_i}}} \to {Q_{{V_i}}}(t) = \sigma _i^2{{{ h}}_i}X(t){{{ h}}_i^{\rm{T}}} + {Q_{{v_i}}}, t \to \infty, w.p.1 $.
将每时刻辨识的$ {\hat \Phi _o}(t) $、$ {\hat \alpha _i}(t) $和$ {\hat Q_{{V_i}}}(t) $替代第2节中的局部最优滤波器、互协方差阵和分布式融合滤波算法中的$ \Phi $、$ {\alpha _i} $和$ {Q_{{V_i}}}(t) $, 可得到相应的自校正状态估计算法.为了后文阐述方便, 记相应的自校正局部滤波器、预报误差方差、滤波误差协方差、增益、融合滤波器分别为$ {\hat {\boldsymbol x}_{si}}(t|t) $、$ {\hat \Sigma _{si}}(t|t - 1) $、$ {\hat P_{sij}}(t|t) $、$ {\hat K_{si}}(t) $和$ {\hat {\boldsymbol x}_s}(t|t) $.
5. 自校正滤波器的收敛性分析
下面的引理4给出了DESA方法, 应用DESA方法可证明自校正融合状态滤波器$ {\hat {\boldsymbol x}_s}(t|t) $的收敛性.
引理4[24]. 考虑动态误差系统
$$ \begin{equation} \delta (t) = T(t)\delta (t - 1) + u(t) \end{equation} $$ (52) 其中$ t \ge 0 $, 输出$ \delta (t) \in{{\bf R}}^n $, 输入$ u(t) \in {{\bf R}}^n $, 并且矩阵$ T(t) \in {{{\bf R}}^{n \times n}} $是一致渐近稳定的.若$ u(t) $是有界的, 则$ \delta {\rm{(}}t{\rm{)}} $是有界的.当$ t \to \infty $时, 若$ u(t) \to 0 $, 则$ \delta (t) \to 0 $.
记带已知参数$ \Phi $、$ {\alpha _i} $和$ \sigma _i^2 $的系统(1)和(3)为$ ({\rm{\Phi }}, {\rm{\Gamma}}, {F_i}, {Q_{\boldsymbol w}}, {Q_{{V_i}}}(t)) $, 相应的带时变参数$ {{\rm{\hat \Phi }}_o}(t) $、$ {\hat \alpha _i}(t) $和$ \hat \sigma_i^2(t) $的系统(1)和(3)为$ ({{\rm{\hat \Phi }}_o}(t), {\rm{\Gamma }}, {\hat F_i}(t), {Q_{\boldsymbol w}}, {\hat Q_{{V_i}}}(t)) $.
引理5[24]. 在假设1$ \, \sim\, $4下, 系统$ ({\rm{\Phi }}, {\rm{\Gamma }}, $ $ {F_i}, $ $ {Q_{\boldsymbol w}}, $ $ {Q_{{V_i}}}(t)) $和$ ({{\rm{\hat \Phi }}_o}(t), \Gamma, {\hat F_i}(t), {Q_{\boldsymbol w}}, {\hat Q_{{V_i}}}(t)) $是一致完全可观和一致完全可控的; 系统$ ({\rm{\Phi }}, \Gamma, {F_i}, {Q_{\boldsymbol w}}, {Q_{{V_i}}}(t)) $的最优局部滤波器的状态转移阵$ {\Psi _{fi}}(t) = [{I_n}-{K_i}(t){F_i}]{\rm{\Phi }} $是一致渐近稳定的, 且$ {K_i}(t) $是有界的; 系统$ ({{\rm{\hat \Phi }}_o}(t), \Gamma, {\hat F_i}(t), {Q_{\boldsymbol w}}, {\hat Q_{{V_i}}}(t)) $的自校正局部滤波器的状态转移阵$ {\hat \Psi _{sfi}}(t) = [{I_n}-{\hat K_{si}}(t){\hat F_i}{\rm{(}}t{\rm{)}}]{{\rm{\hat \Phi }}_o}(t) $是一致渐近稳定的, 且$ {\hat K_{si}}(t) $是有界的.而且$ \Delta {\hat K_i}(t) = {\hat K_{si}}(t)-{K_i}(t)\to 0 $和$ \Delta {\hat \Psi _{fi}}(t) = {\hat \Psi _{sfi}}(t)-{\Psi _{fi}}(t) \to 0 $, $ t \to\infty $.自校正局部滤波误差方差阵$ {\hat P_{si}}(t|t) $收敛于最优局部滤波误差方差阵$ {P_i}(t|t) $, 自校正滤波误差互协方差阵$ {\hat P_{sij}}(t|t) $收敛于最优滤波误差互协方差阵$ {P_{ij}}(t|t) $.
定理2. 在假设1$ \, \sim\, $4下, 自校正局部滤波器$ {\hat {\boldsymbol x}_{si}}(t|t) $收敛于最优局部滤波器$ {\hat {\boldsymbol x}_i}(t|t) $, 即
$$ \begin{equation} [{\hat {\boldsymbol x}_{si}}(t|t) - {\hat {\boldsymbol x}_i}(t|t)] \to 0, t \to \infty \end{equation} $$ (53) 证明. 由式(7)可得自校正滤波器为
$$ \begin{equation} {\hat {\boldsymbol x}_{si}}(t|t) = {\hat \Psi _{sfi}}(t){\hat {\boldsymbol x}_{si}}(t - 1|t - 1)+{\hat K_{si}}(t){y_i}(t) \end{equation} $$ (54) 注意到$ {\hat K_{si}}(t) $和$ {y_i}(t) $是有界的, $ {\hat \Psi _{sfi}}(t) $是一致渐近稳定的, 应用引理4得到$ {\hat {\boldsymbol x}_{si}}(t|t) $是有界的.令$ {\delta _i}(t) = {\hat {\boldsymbol x}_{si}}(t|t) - {\hat {\boldsymbol x}_i}(t|t) $, 式(54)减式(7)有动态误差方程
$$ \begin{equation} {\delta _i}(t) = {\Psi _{fi}}(t){\delta _i}(t - 1) + {u_i}(t) \end{equation} $$ (55) 其中$ {u_i}(t) = \Delta {\hat \Psi _{fi}}(t){\hat {\boldsymbol x}_{si}}(t - 1|t - 1) + \Delta {\hat K_i}(t){y_i}(t) $.根据$ {\hat {\boldsymbol x}_{si}}(t|t) $和$ { y_i}(t) $的有界性, 由$ \Delta {\hat K_i}(t)\to 0 $和$ \Delta{\hat \Psi _{fi}}(t){\to0} $, 有$ {u_i}(t)\to0 $.对式(55)应用引理4, 当$ t \to \infty $时, 有$ {\delta _i}(t) \to 0 $, 即式(53)成立.
定理3. 在假设1$ \, \sim\, $4下, 自校正加权融合滤波器$ {\hat {\boldsymbol x}_s}(t|t) $收敛于最优加权融合滤波器$ {\hat {\boldsymbol x}_o}(t|t) $, 即
$$ \begin{equation} [{\hat {\boldsymbol x}_s}(t|t) - {\hat {\boldsymbol x}_o}(t|t)] \to 0, t \to \infty \end{equation} $$ (56) 证明. 由引理3和引理5有$ {W_i}(t) $有界且$ \Delta {\hat W_i}(t) = [{\hat W_{si}}(t) -{W_i}(t)] \to 0 $.由式(53)以及$ {\hat {\boldsymbol x}_{si}}(t|t) $的有界性可得
$$ \begin{align} {\hat {\boldsymbol x}_s}(t|t) & - {\hat {\boldsymbol x}_o}(t|t) = \sum\limits_{i = 1}^L {{W_i}(t)[{{\hat {\boldsymbol x}}_{si}}(t|t) - {{\hat {\boldsymbol x}}_i}(t|t)} ]+ \\ &\sum\limits_{i = 1}^L {\Delta {{\hat W}_i}(t){{\hat {\boldsymbol x}}_{si}}(t|t)} \to 0 \end{align} $$ (57) 即式(56)成立.
6. 仿真例子
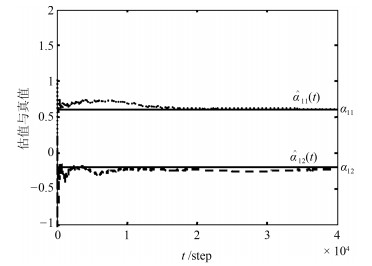
考虑带三传感器系统(1)和(2), 其中系数阵为$ \Phi = \left[{\begin{array}{*{20}{c}} {{a_{11}}} & {{a_{12}}} \\ {0.4} & { - 0.8} \\ \end{array}} \right], \Gamma = \left[{\begin{array}{*{20}{c}} {0.5} \\ {0.6} \\ \end{array}} \right], {{h}_1} = \left[{\begin{array}{*{20}{c}} {0.5} & {1.2} \\ \end{array}} \right] $, $ {{ h}_2} = \left[{\begin{array}{*{20}{c}} {0.6} & {1.9} \\ \end{array}}\right], {{ h}_3} = \left[{\begin{array}{*{20}{c}} {1.4} & 2 \\ \end{array}} \right], $噪声方差为$ {Q_{\boldsymbol w}} = 3, {Q_{{v_1}}} = 2, {Q_{{v_2}}} = 0.4, {Q_{{v_3}}} = 1, \left\{ {{\mu _i}(t)} \right\} $, $ i = 1, 2, 3 $为在$ [0, 1] $区间取值的标量随机变量.取初值$ {\hat{\boldsymbol x}_i}(0|0) = 0, {P_{ij}}(0|0) = 0.1{I_2}, i, j = 1, 2, 3 $.假设$ {a_{11}}, {a_{12}}, \{ {\mu _i}(t)\} $的数学期望$ {\alpha _i} $与方差$ \sigma _i^2, i = 1, 2, 3 $, 未知.目的是辨识未知模型参数$ {a_{11}} $和$ {a_{12}} $、期望$ {\alpha _i} $和方差$ \sigma _i^2, i = 1, 2, 3 $并求自校正融合状态滤波器.
在仿真中假设未知模型参数$ {a_{11}} = 0.6 $, $ {a_{12}} = -0.2 $, $ {\mu _i}(t), i = 1, 2, 3 $, 的概率分布分别为$ P{\rm{\{ }}{\mu _1}(t){\rm{ = 0.3\} = 0.3}} $, $ P{\rm{\{ }}{\mu _1}(t){\rm{ = 0.5\} = 0.2}} $, $ P{\rm{\{ }}{\mu _1}(t){\rm{ = 1\} = 0.5}} $, $ P{\rm{\{ }}{\mu_2}(t){\rm{ = 0.4\} = 0.4}} $, $ P{\rm{\{ }}{\mu_2}(t) {\rm{ = 0.7\} = 0.3}} $, $ P{\rm{\{ }}{\mu_2}(t){\rm{ = 0.9\} = 0.3}} $, $ P{\rm{\{ }}{\mu_3}(t){\rm{ = 0.1\}}} $ $ {{ = 0.2}} $, $ P{\rm{\{ }}{\mu_3}(t){\rm{ = 0.6\} = 0.6}} $, $ P{\rm{\{ }}{\mu_3}(t){\rm{ = 0.9\} = 0.2}} $.我们可以计算$ {\mu _i}(t) $, $ i = 1, 2, 3 $的数学期望和方差分别为$ {\alpha _1} = 0.69 $, $ {\alpha _2}{\rm{ = }}0.64 $, $ {\alpha_3} = 0.56 $, $ \sigma _1^2 = 0.1009 $, $ \sigma_2^2 = 0.0444 $, $ \sigma_3^2 = 0.0664 $.
为了与文献[5-7, 24]中的参数加权平均融合算法相比较.如下给出了模型参数$ {a_{11}} $和$ {a_{12}} $的局部估计误差方差、加权平均估计误差方差以及分布式加权融合估计误差方差算法.
a) 局部参数估计和分布式加权融合估计:
根据前面的第3节, 可知未知模型参数与$ {\vartheta _A} = {[{a_1}, {a_2}]^{\rm{T}}} $有如下线性关系
$$ \begin{equation} {\Lambda ^{[\Phi ]}} = S{\vartheta _A} + \gamma \end{equation} $$ (58) 其中$ {\Lambda ^{[\Phi]}} = \left[{\begin{array}{*{20}{c}} {{a_{11}}} \\ {{a_{12}}} \\ \end{array}} \right] $, $ S = \left[{\begin{array}{*{20}{c}} { - 1} & 0 \\ {{ {{ - {a_{22}}} \over {{a_{21}}}}}} & {{ {{ - 1} \over {{a_{21}}}}}} \\ \end{array}} \right] $, $ \gamma = \left[{\begin{array}{*{20}{c}} {{a_{22}}} \\ {{ {{a_{_{22}}^2} \over {{a_{21}}}}}} \\ \end{array}} \right]. $
${\Lambda ^{[{\rm{\Phi }}]}}$的局部估值为
$$ \begin{equation} \hat \Lambda _i^{[\Phi ]}(t) = S{\hat \vartheta _{Ai}}(t) + \gamma , i = 1, 2, 3 \end{equation} $$ (59) $ {\hat \vartheta _{Ai}}(t) $可由最小二乘算法辨识, 将$ S, {\hat \vartheta _{Ai}}(t), \gamma $代入式(38)中, 可分别获得局部估值$ \hat \Lambda _i^{[\Phi]}(t) $和局部估计误差方差$ {P_{\Lambda _i^{[\Phi]}}}(t) $以及误差互协方差$ {P_{\Lambda _{ij}^{[\Phi]}}}(t), i, j = 1, 2, 3 $.再根据定理1中参数融合估计算法, 可得参数融合估计误差方差$ {P_{\Lambda _0^{[{\rm{\Phi }}]}}}(t) $.
b) 参数的加权平均融合估计:
${\Lambda ^{[{\rm{\Phi }}]}}$的加权平均估值为
$$ \begin{equation} \bar \Lambda _{}^{[\Phi ]}(t) = { {1 \over 3}}\sum\limits_{i = 1}^3 {\hat \Lambda _i^{[\Phi ]}(t)} \end{equation} $$ (60) 定义加权平均估计误差方差为$ {P_{\bar \Lambda _{}^{[\Phi]}}}(t) = {\rm{E}}[\tilde {\bar \Lambda}_{}^{[\Phi]}(t)(\tilde {\bar \Lambda} _{}^{[\Phi]}(t)){^{\rm{T}}}] $, 其中$ \tilde {\bar \Lambda} _{}^{[\Phi]}(t) = {\Lambda ^{[\Phi]}} -\bar \Lambda _{}^{[\Phi]}(t) = { {1 \over 3}}\sum_{i = 1}^3 {(S{{\tilde \vartheta }_{Ai}}(t))} $.于是, 加权平均估计误差方差可计算为
$$ \begin{equation} {P_{\bar \Lambda _{}^{[\Phi ]}}}(t) = { {1 \over 9}}S\left(\sum\limits_{i = 1}^3 {\sum\limits_{j = 1}^3 ({P_{{\vartheta _{Aij}}}}}(t))\right){S^{\rm{T}}} \end{equation} $$ (61) 图 1给出了应用部分3参数融合辨识算法获得的未知模型参数融合辨识结果.由图可知随着时间的增长, 辨识结果收敛于真值.
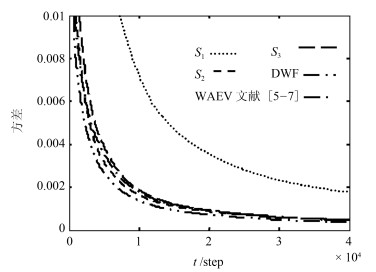
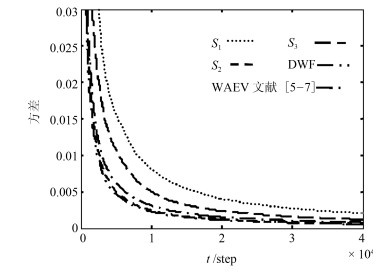
图 2和图 3分别给出了未知模型参数$ {a_{11}} $和$ {a_{12}} $的局部估计误差方差、加权平均估计误差方差和分布式融合估计误差方差的比较结果.由图可知分布式加权融合辨识误差方差小于各局部辨识误差方差和加权平均辨识误差方差.图中$ {S_i}, i = 1, 2, 3 $表示第$ i $个传感器的局部辨识的误差方差, DWF表示分布式加权融合辨识的误差方差, WAEV表示加权平均融合辨识的误差方差.
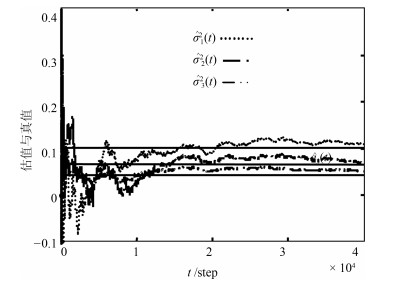
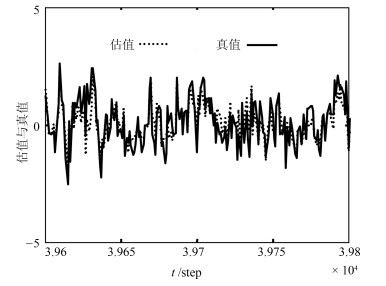
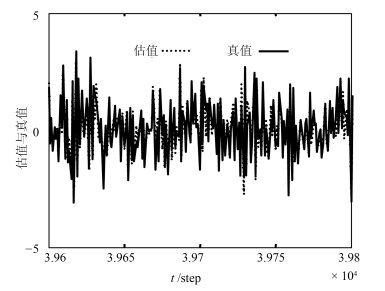
图 4和图 5给出了应用部分4中辨识算法分别对不同传感器的随机变量$ \{ {\mu _i}(t)\}, i = 1, 2, 3 $的数学期望和方差进行辨识的结果.曲线表示辨识结果, 直线表示相应的真值.由图可知随着时间的增长, 辨识结果收敛于真值.图 6和图 7给出了自校正融合状态滤波器, 可见自校正融合估计具有有效性.
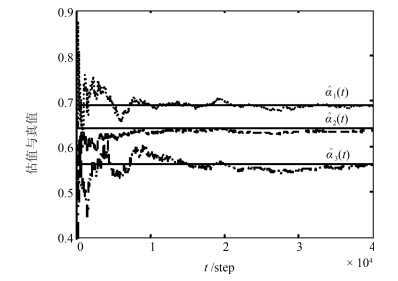 图 4 $\mu_{i}(t)$的数学期望辨识Fig. 4 Identification of Mathematical expectation of $\mu_{i}(t)$
图 4 $\mu_{i}(t)$的数学期望辨识Fig. 4 Identification of Mathematical expectation of $\mu_{i}(t)$图 8和图 9给出了局部和融合的最优与自校正状态估计误差方差图.由图可见, 各局部自校正误差方差收敛于局部最优误差方差, 自校正融合误差方差收敛于最优融合误差方差, 即自校正滤波器具有渐近最优性.而且自校正融合滤波器比各局部自校正滤波器具有更高精度.图中$ {S_i}, i = 1, 2, 3 $表示第$ i $个传感器的局部自校正估计误差方差, SF表示自校正融合估计误差方差, 直线表示相应的最优方差.
 图 8 局部、融合最优与自校正状态分量1的滤波误差方差Fig. 8 Variance of the first state component of local, fusion optimal and self-tuning filters
图 8 局部、融合最优与自校正状态分量1的滤波误差方差Fig. 8 Variance of the first state component of local, fusion optimal and self-tuning filters 图 9 局部、融合最优与自校正状态分量2的滤波误差方差Fig. 9 Variance of the second state component of local, fusion optimal and self-tuning filters
图 9 局部、融合最优与自校正状态分量2的滤波误差方差Fig. 9 Variance of the second state component of local, fusion optimal and self-tuning filters目前参考文献[5-7, 24]中的自校正滤波算法大都没有考虑传感器的衰减观测现象.图 10给出了传感器存在衰减观测而没有给予考虑的自校正融合滤波器与本文考虑衰减观测的自校正融合滤波器在30次蒙特卡洛实验下均方误差迹的比较.可见, 在传感器存在衰减观测时, 本文考虑衰减观测的自校正融合滤波器具有更高的精度.
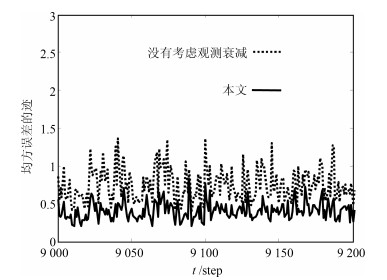 图 10 考虑衰减观测与没有考虑衰减观测自校正融合滤波器的均方误差的迹Fig. 10 Trace of mean square error of the self-tuning fusion filters with/without considering fading measurements
图 10 考虑衰减观测与没有考虑衰减观测自校正融合滤波器的均方误差的迹Fig. 10 Trace of mean square error of the self-tuning fusion filters with/without considering fading measurements7. 结论
对带未知模型参数和衰减观测率的多传感器随机系统, 应用RELS算法和相关函数分别对未知模型参数、描述衰减观测现象的随机变量的数学期望和方差进行在线实时辨识, 提出了线性无偏最小方差矩阵加权融合模型参数辨识器.与已有文献的加权平均融合模型参数辨识算法相比, 本文所提出的线性无偏最小方差矩阵加权融合参数辨识算法具有更高的估计精度.将实时辨识的模型参数、数学期望和方差代入到最优局部和融合状态估计算法中获得了相应的自校正状态滤波算法.利用DESA方法证明了自校正状态滤波器收敛于最优状态滤波器.与现有文献的带未知模型参数的自校正估计算法相比, 本文还考虑了传感器的衰减观测现象, 并给出了采用相关函数辨识衰减观测的数学期望和方差的算法.
-

图 1 恐怖组织网络时空演化过程
Fig. 1 Spatiotemporal evolution of the terrorism organization network
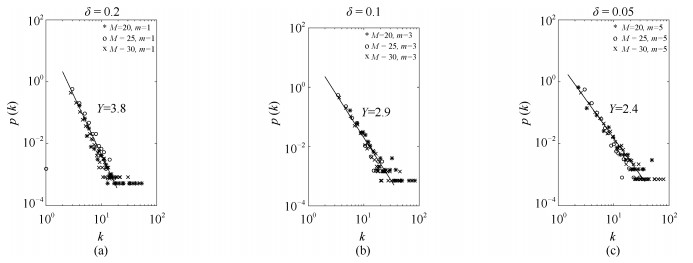
图 3 $N(t)=10\, 000, $ $M=20, 25, $ 30, $m=1, 3, $ 5, 在双对数坐标下, $\delta=0.2, 0.1, 0.05$的局域网络度分布比较图
Fig. 3 The comparison of degree distribution at $\delta=0.2, $ 0.1, 0.05 of the local network, in the log-log scale, for the case that $N(t) = 10 000$, $M = 20, 25, $30 and $m= 1, 3, 5$

图 4 网络($M=25$)增长到10 000个节点时, 在$m=1, 3, 5$条件下, 局域内节点的$C'(n_i)$值比较图
Fig. 4 The comparison of $C'(n_i)$ of local network, at network ($M=25$) growing to $10 000$ nodes with $m = 1, 3, 5$


图 6 "9$\cdot$11"恐怖组织网络择优增长演化过程
Fig. 6 Preferential-growing evolution of "9$\cdot$11" terrorist network

图 7 伦敦爆炸案恐怖组织网络择优增长演化过程
Fig. 7 Preferential-growing evolution of London bombing terrorist network

图 8 马德里火车站爆炸案恐怖组织网络择优增长演化过程
Fig. 8 Preferential-growing evolution of Madrid train bombings terrorist network

图 9 在双对数坐标下, 基于多局域的"9$\cdot$11"恐怖组织网络择优增长模型中局域度分布对比图
Fig. 9 In the log-log scale, the comparison of local network degree distribution of "9$\cdot$11" terrorist network based on multi-local-network preferential-growing model
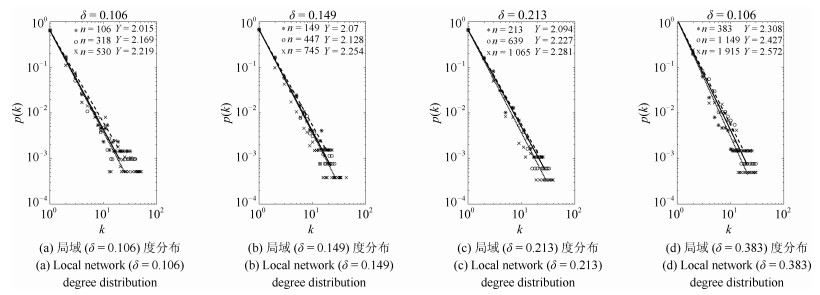
图 10 在双对数坐标下, 基于多局域的伦敦爆炸案恐怖组织网络择优增长模型中局域度分布对比图
Fig. 10 In the log-log scale, the comparison of local network degree distribution of London bombing terrorist network based on multi-local-network preferential-growing model

图 11 在双对数坐标下, 基于多局域的伦敦爆炸案恐怖组织网络择优增长模型中局域度分布对比图
Fig. 11 In the log-log scale, the comparison of local network degree distribution of London bombing terrorist network based on multi-local-network preferential-growing model

图 12 三个恐怖组织网络演化到1 000个节点时, $C'_i(n_i)$统计对比图
Fig. 12 The statistical comparison of $C'_i(n_i)$, with the three terrorist networks ha"ing grown to 1 000 nodes

图 13 三个恐怖组织网络演化到3 000个节点时, $C'_i(n_i)$统计对比图
Fig. 13 The statistical comparison of $C'_i(n_i)$, with the three terrorist networks ha"ing grown to 3 000 nodes

图 14 三个恐怖组织网络演化到5 000个节点时, $C'_i(n_i)$统计对比图
Fig. 14 The statistical comparison of $C'_i(n_i)$, with the three terrorist networks ha"ing grown to 5 000 nodes
表 1 "9$\cdot$11"恐怖组织网络局域划分
Table 1 The di"ision on local network of "9$\cdot$11" Terrorist Network
$L_j (t)$ $\delta$ 5 0.263 4 0.211 5 0.263 5 0.263  下载: 导出CSV
下载: 导出CSV
表 2 伦敦爆炸案恐怖组织网络局域划分
Table 2 The division on local network of London bombing terrorist network
$L_j (t)$ $\delta$ 5 0.106 7 0.149 7 0.149 10 0.213 18 0.383
下载: 导出CSV
表 3 马德里火车站爆炸案恐怖组织网络局域划分
Table 3 The division on local network of Madrid train bombings terrorist network
$L_j (t)$ $\delta$ 4 0.06 4 0.06 6 0.09 10 0.149 11 0.164 13 0.193 19 0.284
下载: 导出CSV
-
[1] 程聪慧, 郭俊华.网络恐怖主义的挑战及其防范.情报杂志, 2015, 34(3):10-15, 20 doi: 10.3969/j.issn.1002-1965.2015.03.003Cheng Cong-Hui, Guo Jun-Hua. Challenges and prevention of cyberterrorism. Journal of Intelligence, 2015, 34(3):10-15, 20 doi: 10.3969/j.issn.1002-1965.2015.03.003 [2] Stripling M. Embodying terror networks: How directioncreates structure[Online], available: http://www.crisisville.com/files/Terrorism-DirectedNetworks.pdf, January 8, 2013. [3] Moon I C, Carley K M. Modeling and simulating terrorist networks in social and geospatial dimensions. IEEE Intelligent Systems, 2007, 22(5):40-49 doi: 10.1109/MIS.2007.4338493 [4] Krebs V E. Mapping networks of terrorist cells. Connections, 2002, 24(3):43-52 [5] Krebs V E. Uncloaking terrorist networks. First Monday, 2002, 7(4):1-4 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Open J-Gate000002557116 [6] Memon N, Hicks D L, Harkiolakis N, Rajput A Q K. Retracted: Small world terrorist networks: a preliminary investigation. Applications and Innovations in Intelligent Systems XV. London: Springer, 2008. 339-344 [7] Memon N, Larsen H L, Hicks D L, Harkiolakis N. Retracted: detecting hidden hierarchy in terrorist networks: some case studies. In: Proceedings of the 2008 International Conference on Intelligence and Security Informatics. Taipei, China: Springer-Verlag, 2008. 477-489 [8] Memon N, Larsen H L. Practical Approaches for analysis, visualization and destabilizing terrorist networks. In: Proceedings of the First International Conference on Availability, Reliability and Security. Vienna, Austria: IEEE, 2006. 435-448 [9] Will U K, Memon N, Karampelas P. Detecting new trends in terrorist networks. In: Proceedings of the 2010 International Conference on Social Networks Analysis and Mining. Odense, Denmark: IEEE, 2010. 435-440 [10] Enders W, Su X J. Rational terrorists and optimal network structure. Journal of Conflict Resolution, 2007, 52(1):33-57 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1177/0022002706296155 [11] Carly K M. Dynamic network analysis for counter-terrorism[Online], available: https://www.researchgate.net/publication/228770516_Dynamic_network_analysis_for_counter-terrorism, January 7, 2017. [12] Carly K M. Destabilization of covert networks. Computational and Mathematical Organization Theory, 2006, 12(1):51-56 doi: 10.1007/s10588-006-7083-y [13] 毕震坤, 张伟, 余浩淼, 陈云芳.恐怖网络中基于节点割集分层的组织结构发现方法.南京邮电大学学报(自然科学版), 2014, 34(5):111-118 doi: 10.3969/j.issn.1673-5439.2014.05.018Bi Zhen-Kun, Zhang Wei, Yu Hao-Miao, Chen Yun-Fang. Organizational structure discovery in terrorist networks based on cut Set and hierarchical method. Journal of Nanjing University of Posts and Telecommunications (Nature Science), 2014, 34(5):111-118 doi: 10.3969/j.issn.1673-5439.2014.05.018 [14] 张海, 孙多勇.基于社会网络理论的恐怖组织隐蔽网络分析方法.安全与环境学报, 2011, 11(3):259-264 doi: 10.3969/j.issn.1009-6094.2011.03.063Zhang Hai, Sun Duo-Yong. Study on the terrorist covert networks from the perspective of social network analysis. Journal of Safety and Environment, 2011, 11(3):259-264 doi: 10.3969/j.issn.1009-6094.2011.03.063 [15] 李本先, 凌云翔, 方锦清, 梅建明.恐怖组织如何编制网络.复杂系统与复杂性科学, 2016, 13(1):68-73 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201601006Li Ben-Xian, Ling Yun-Xiang, Fang Jin-Qing, Mei Jian-Ming. How to map the network of terrorism group. Complex Systems and Complexity Science, 2016, 13(1):68-73 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201601006 [16] 李本先, 李孟军, 方锦清, 仰琎歆.恐怖组织网络的时空演化规律.自动化学报, 2013, 39(6):772-779 http://www.aas.net.cn/CN/abstract/abstract18102.shtmlLi Ben-Xian, Li Meng-Jun, Fang Jin-Qing, Yang Jin-Xin. Empirical study on spatiotemporal evolution of terrorism organization network. Acta Automatica Sinica, 2013, 39(6):772-779 http://www.aas.net.cn/CN/abstract/abstract18102.shtml [17] 李本先, 江成俊, 方锦清.网络科学在反恐研究中面临的挑战和机遇.复杂系统与复杂性科学, 2014, 11(1):60-66 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201401008Li Ben-Xian, Jiang Cheng-Jun, Fang Jin-Qing. Network science's challenges and opportunities in counter-terrorism research. Complex Systems and Complexity Science, 2014, 11(1):60-66 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201401008 [18] 李本先, 方锦清, 江成俊, 梅建明, 迟妍.恐怖组织网络的心理学与动力学分析:从个体到群体.复杂系统与复杂性科学, 2014, 11(2):87-94 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201402011Li Ben-Xian, Fang Jin-Qing, Jiang Cheng-Jun, Mei Jian-Ming, Chi Yan. Psychology and dynamical analysis of terrorism organization:from individual to group. Complex Systems and Complexity Science, 2014, 11(2):87-94 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx201402011 [19] 许晴, 祖正虎, 郑涛.恐怖组织网络的实证研究.合肥工业大学学报(自然科学版), 2010, 33(2):242-244, 292 doi: 10.3969/j.issn.1003-5060.2010.02.020Xu Qing, Zu Zheng-Hu, Zheng Tao. Empirical study of terrorist organizations network. Journal of Hefei University of Technology (Natural Science), 2010, 33(2):242-244, 292 doi: 10.3969/j.issn.1003-5060.2010.02.020 [20] 孙多勇, 李文举, 付举磊, 李博.基于Agent建模的恐怖袭击影响因素仿真分析.安全与环境学报, 2013, 13(5):259-264 http://d.old.wanfangdata.com.cn/Periodical/aqyhjxb201305055Sun Duo-Yong, Li Wen-Ju, Fu Ju-Lei, Li Bo. On the factors leading to terror attacks based on the agent simulation analysis approach. Journal of Safety and Environment, 2013, 13(5):259-264 http://d.old.wanfangdata.com.cn/Periodical/aqyhjxb201305055 [21] Lange S, Donges J F, Volkholz J, Kurths J. Local difference measures between complex networks for dynamical system model evaluation. PLoS One, 2015, 10(4):Article No. e0129413 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Doaj000004522087 [22] Li B, Sun D Y, Zhu R Q, Li Z. Agent based modeling on organizational dynamics of terrorist network. Discrete Dynamics in Nature and Society, 2015, 2015: Article No. 237809 [23] Gaharwar R D, Shah D B. Application of centrality principles for terrorist network role analysis. International Journal of Scientific Research in Science and Technology, 2018, 4(2):1216-1221 [24] Barabási A L, Albert R. Emergence of scaling in random networks. Science, 1999, 286(5439):509-512 doi: 10.1126/science.286.5439.509 [25] Barabasi A L. Linked:The New Science of Networks. Cambridge, MA:Perseus, 2002. [26] Michalak T P, Rahwan T, Skibski O, Wooldridge M. Defeating terrorist networks with game theory. IEEE Intelligent Systems, 2015, 30(1):53-61 doi: 10.1109/MIS.2015.11 [27] Husslage B, Borm P, Burg T, Hamers H, Lindelauf R. Ranking terrorists in networks:a sensitivity analysis of Al Qaedaś 9/11 attack. Social Networks, 2015, 42:1-7 doi: 10.1016/j.socnet.2015.02.003 [28] Aitkin M, Vu D, Francis B. Statistical modelling of a terrorist network. Journal of the Royal Statistical Society, 2017, 180(3):751-768 doi: 10.1111/rssa.12233 [29] Penzar D, Srbljinovic A. About modeling of complex networks with applications to terrorist group modeling. Interdisciplinary Description of Complex Systems, 2005, 3(1):27-43 [30] Li X, Chen G R. A local-world evolving network model. Physica A:Statistical Mechanics and its Applications, 2003, 328(1-2):274-286 doi: 10.1016/S0378-4371(03)00604-6 [31] Qin S, Dai G Z. A new local-world evolving network model. Chinese Physics B, 2009, 18(2):383-390 doi: 10.1088/1674-1056/18/2/001 [32] Arquilla J, Ronfeldt D F. Networks and Netwars:the Future of Terror, Crime, and Militancy. California:Santa Monica, 2001. 20-24 [33] Bohannon J. Counter terrorism's new tool:"metanetwork" analysis. Science, 2009, 325(5939):409-411 doi: 10.1126/science.325_409 [34] Wasserman S, Faust K. Social Network Analysis:Methods and Applications. London:Cambridge University Press, 1994. 125-245 [35] Stephenson K, Zelen M. Rethinking centrality:methods and examples. Social Networks, 1989, 11(1):1-37 doi: 10.1016/0378-8733(89)90016-6 [36] Morris M. Networks and Diffusion: An Application of Loglinear Models to the Population Dynamics of Disease. Chicago: Dissertation Department of Sociology, 1989. 110-126 [37] Gill P, Corner E, Conway M, Thornton A, Bloom M, Horgan J. Terrorist use of the internet by the numbers. Criminology & Public Policy, 2017, 16(1):99-117 doi: 10.1111/1745-9133.12249 [38] Gaharwar R D, Shah D B, Gaharwar G K S. Terrorist network mining:issues and challenges. International Journal of Advance Research in Science and Engineering, 2015, 4(1):33-37 http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0211627901/ [39] 张将星. 1970-2013年全球恐怖主义活动的特征分析-兼论"9·11"事件前后时段比较.同济大学学报(社会科学版), 2016, 27(2):48-57 doi: 10.3969/j.issn.1009-3060.2016.02.008Zhang Jiang-Xing. An analysis of the features of global terrorist activities from 1970 to 2013-a comparison of those before and after Sept. 11. Journal of Tongji University (Social Science Section), 2016, 27(2):48-57 doi: 10.3969/j.issn.1009-3060.2016.02.008 期刊类型引用(3)
1. 苏彦龙,胡雨,计昊,王玉玲,潘士通,刘膨源. 基于贝叶斯概率更新的电力物资质量检测方法. 自动化与仪器仪表. 2024(06): 127-131 .  百度学术
百度学术2. 唐浩然. 机器视觉的研究及应用进展. 科技与创新. 2024(16): 52-55 . 百度学术3. 彭姗姗. 基于优化AE数学模型的计算机网络风险检测与评估方法. 辽东学院学报(自然科学版). 2024(02): 129-135 . 百度学术其他类型引用(7)
-

 下载:
下载:

计量
- 文章访问数: 1668
- HTML全文浏览量: 504
- PDF下载量: 95
- 被引次数: 10
