

Research on Structure Model of General Intelligent System Based on Ecological Evolution
-
摘要: 从系统论、认知神经科学和生态演化的角度看, 智能是指生物体根据环境、条件、目标, 自适应地调整自身或调度各种资源实现目标的能力, 智能起源于生命, 智能是生物的基本特征.借助于脑神经系统演化的历史, 展示了自然智能的演化过程, 并由此构建了一个基于生态演化的通用智能系统结构模型, 系统地分析了一般智能系统的普遍性、开放性、动态演化性、相对稳定性、功能性、结构性、依附性、相对独立性、可延续性等基本特征.论文根据智能演化进程将智能系统分为7级, 利用智能系统结构模型分类探索专用人工智能和通用人工智能的发展方向以及有关智能系统的学习方法.这些工作对人工智能和智能科学基础理论研究与应用具有一定的启发意义.Abstract: From the perspective of system theory, cognitive neuroscience and ecological evolution, intelligence refers to the ability of organism to adjust itself adaptively or to schedule various resources to achieve the goals according to the environment, conditions and targets. Intelligence originates from life and is a basic biological feature. Based on the history of the evolution of the brain nervous system, this paper shows the evolution of natural intelligence and constructs a general intelligent system structure model based on ecological evolution. It systematically analyzes the universality, openness, dynamic evolution, relative stability, functionality, structuredness, dependence, relative independence, continuity and other basic features. According to the process of intelligent evolution, this paper divides the intelligent system into 7 levels. Using the structure model of intelligent system, the development direction of special artificial intelligence, general artificial intelligence and the learning methods of intelligent system are explored. These works have some enlightening significance to the research and application of artificial intelligence and basic theory of intelligent science.
-
Key words:
- Intelligence /
- brain intelligence /
- structure of intelligent systems /
- artificial intelligence /
- origin and evolution of intelligence
1) 本文责任编委 段书凯 -
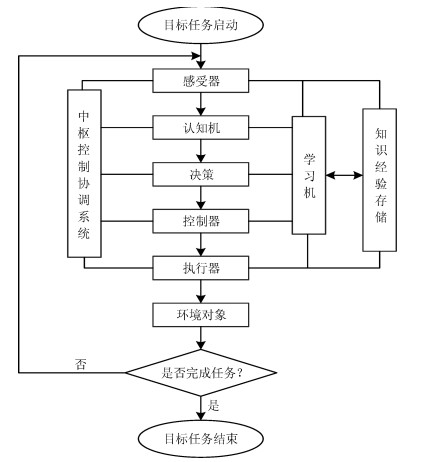
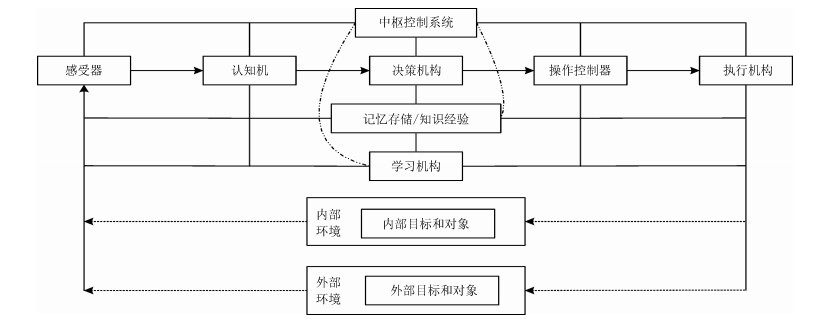
图 4 智能系统信息加工逻辑结构图
Fig. 4 Logic diagram of information processing in intelligent system
表 1 演化模型与现有模型的比较
Table 1 Comparison between evolutionary model and existing modes
主要模型 原理 功能描述 应用 参考文献 知识模型 基于物理符号系统假设 基于知识的智能系统 专家系统等专用智能系统 [6-7] 信息生态模型 基于信息转换原理的机制主义和信息生态方法 信息观、系统观、机制观指导下的信息–知识–智能转换系统 通用智能系统信息生态模型 [22] 认知–意识模型 基于认知与心智的研究成果 认知系统和意识系统结合的智能系统 模拟认知与意识系统 [23] 认知计算模型 基于脑科学和生物神经网络工作原理 多尺度、多脑区、多认知功能融合的认知计算平台 模拟各种脑区的认知功能 [20-21] 基于Agent –环境–行为的UAI模型 基于Occam和Epicurus原理的贝叶斯概率论和图灵计算理论 智能体与贝叶斯理论、强化学习结合的计算平台 模拟推理预测决策和行动的过程 [9-10] LIDA模型 在认知和计算模型IDA的基础上, 增加学习功能构成LIDA 认知计算和学习的通用智能系统架构 模拟人类的认知和计算 [11] 类人通用智能架构AGI 在LIDA的基础上综合多人研究结果, 增加多模态感知、问题求解等内容形成AGI 具有认知计算、学习、多模态感知、问题求解等多种智能功能 构建通用的人类智能系统平台 [12] 抽象智能模型 认知功能和脑神经系统结构结合 一种认知功能和脑神经系统结构对应的抽象智能模型 理解认知和记忆的关系 [13-14] 智能演化模型 基于系统论、认知神经科学和进化论的智能演化 普适的一般智能系统模型 探索一般智能系统理论 本文  下载: 导出CSV
下载: 导出CSV
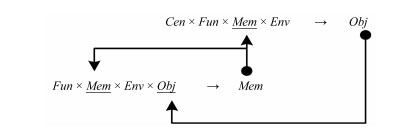
表 2 智能系统的分级和形式化表示
Table 2 The hierarchy and formal representation of intelligent systems
智能系统 形式化表示 极简智能系统 $(S, D, A, Env, Obj)$ 简单智能系统 $(Fun, Env, Obj)$ 基本智能系统 $(Mem_{1}, Fun, Env, Obj)$ 初级智能系统 $(Cen_{1}, Mem_{1}, Learn, Fun, Env, Obj)$ 中级智能系统 $(Cen_{2}, Mem_{2}, Learn, Fun, Env, Obj)$ 高级智能系统 $(Cen_{3}, Mem_{3}, Learn, Fun, Env, Obj)$ 超级智能系统 $(Others, Cen_{4}, Mem_{4}, Learn, Fun, Env, Obj)$
下载: 导出CSV
-
[1] 丘成桐. 2017中国计算机大会报告: 现代几何学在计算机科学中的应用[Online], available: http://cncc.ccf.org.cn/struct/24, October 26, 2017 [2] 2017中国国际工业博览会院士圆桌会议: 人工智能与上海发展[Online], available: http://sh.eastday.com/m/20171109/u1ai10985568.html, November 8, 2017 [3] Hassabis D, Kumaran D, Summerfield C, Botvinick M. Neuroscience-inspired artificial intelligence. Neuron, 2017, 95(2): 245-258 doi: 10.1016/j.neuron.2017.06.011 [4] 陈霖.新一代人工智能的核心基础科学问题:认知和计算的关系.中国科学院院刊, 2018, 33(10): 1104-1106 http://d.old.wanfangdata.com.cn/Periodical/zgkxyyk201810011Chen Lin. The core basic scientific problem of the new generation of artificial intelligence: the relationship between cognition and computation. Bulletin of Chinese Academy of Sciences, 2018, 33(10): 1104-1106 http://d.old.wanfangdata.com.cn/Periodical/zgkxyyk201810011 [5] 国务院.国务院关于印发新一代人工智能发展规划的通知, 国发〔2017〕35号[Online].获取自http://www.gov.cn/zhengce/content/2017-07/20/content_5211996.htm, 2017年7月20日China issues guideline on artificial intelligence development [Online], available: http://www.gov.cn/zhengce/content/2017-07/ 20/content_5211996.htm, July 20, 2017 [6] 王富东.结构化智能系统及其实现.河北省科学院学报, 1994, (1): 15-23Wang Fu-Dong. Structural intelligent system and its implemenlation. Journal of the Hebei Academy of Sciences, 1994, (1): 15-23 [7] 胡保生, 丁根芽.综合智能系统结构与智能系统生成.系统工程与电子技术, 1994, (5): 78-80 doi: 10.3321/j.issn:1001-506X.1994.05.014Hu Bao-Sheng, Ding Gen-Ya. Synthesized intelligent system architecture and intelligent system generation. Systems Engineering and Electronics, 1994, (5): 78-80 doi: 10.3321/j.issn:1001-506X.1994.05.014 [8] Weng J Y, McClelland J, Pentland A, Sporns O, Stockman I, Sur M, et al. Artificial intelligence - Autonomous mental development by robots and animals. Science, 2001, 291(5504): 599-600 doi: 10.1126/science.291.5504.599 [9] Hutter M. Universal Artificial Intelligence: Sequential Decisions Based on Algorithmic Probability. Berlin: Springer-Verlag, 2005. 1-300 [10] Hutter M. One decade of universal artificial intelligence. Theoretical Foundations of Artificial General Intelligence. Paris: Atlantis Press, 2012. 67-88 [11] Franklin C. A foundational architecture for artificial general intelligence. In: Proceedings of the 2007 Advances in Artificial General Intelligence: Concepts, Architectures and Algorithms. Washington, USA: IOS, 2007. 36-54 [12] Goertzel B, Iklé M, Wigmore J. The architecture of human-like general intelligence. Theoretical Foundations of Artificial General Intelligence. Paris: Atlantis Press, 2012. 123-144 [13] Wang Y X. Neuroinformatics models of human memory: mapping the cognitive functions of memory onto neurophysiological structures of the brain. International Journal of Cognitive Informatics and Natural Intelligence, 2013, 7(1): 98-122 doi: 10.4018/jcini.2013010105 [14] Wang Y X. On abstract intelligence and brain informatics: mapping cognitive functions of the brain onto its neural structures. International Journal of Cognitive Informatics and Natural Intelligence, 2012, 6(4): 54-80 doi: 10.4018/jcini.2012100103 [15] 蒲慕明, 徐波, 谭铁牛.脑科学与类脑研究概述.中国科学院院刊, 2016, 31(7): 725-736 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkxyyk201607001Poo Mu-Ming, Xu Bo, Tan Tie-Niu. Brain science and brain-inspired intelligence technology - an overview. Bulletin of Chinese Academy of Sciences, 2016, 31(7): 725-736 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkxyyk201607001 [16] 曾毅, 刘成林, 谭铁牛.类脑智能研究的回顾与展望.计算机学报, 2016, 39(1): 212-223 http://d.old.wanfangdata.com.cn/Periodical/jsjxb201601015Zeng Yi, Liu Cheng-Lin, Tan Tie-Niu. Retrospect and outlook of brain-inspired intelligence research. Chinese Journal of Computers, 2016, 39(1): 212-223 http://d.old.wanfangdata.com.cn/Periodical/jsjxb201601015 [17] 徐波, 刘成林, 曾毅.类脑智能研究现状与发展思考.中国科学院院刊, 2016, 31(7): 793-802 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkxyyk201607008Xu Bo, Liu Cheng-Lin, Zeng Yi. Research status and developments of brain-inspired intelligence. Bulletin of Chinese Academy of Sciences, 2016, 31(7): 793-802 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkxyyk201607008 [18] 阮梅花, 袁天蔚, 王慧媛, 王超男, 傅璐, 陈静, 等.神经科学和类脑人工智能发展:未来路径与中国布局-基于业界百位专家调研访谈.生命科学, 2017, 29(2): 97-113Ruan Mei-Hua, Yuan Tian-Wei, Wang Hui-Yuan, Wang Chao-Nan, Fu Lu, Chen Jing, et al. The strategic option of neuroscience and brain-inspired artificial intelligence in China: based on hundred of experts' insights. Chinese Bulletin of Life Sciences, 2017, 29(2): 97-113 [19] Lu H M, Li Y J, Chen M, Kim H, Serikawa S. Brain intelligence: go beyond artificial intelligence. Mobile Networks and Applications, 2018, 23(2): 368-375 http://d.old.wanfangdata.com.cn/Periodical/jsjxb201601015 [20] 余山.从脑网络到人工智能-类脑计算的机遇与挑战.科技导报, 2016, 34(7): 75-77Yu Shan. From brain networks to artificial intelligence- opportunities and challenges in brain-inspired computing. Science & Technology Review, 2016, 34(7): 75-77 [21] Eliasmith C, Stewart T C, Choo X, Bekolay T, DeWolf T, Tang Y C, et al. A large-scale model of the functioning brain. Science, 2012, 338(6111): 1202-1205 doi: 10.1126/science.1225266 [22] 钟义信.人工智能:概念·法·机遇.科学通报, 2017, 62(22): 2473-2479 http://d.old.wanfangdata.com.cn/Periodical/hnsfdx-jy201805007Zhong Yi-Xin. Artificial intelligence: Concept, approach and opportunity. Chinese Science Bulletin, 2017, 62(22): 2473-2479 http://d.old.wanfangdata.com.cn/Periodical/hnsfdx-jy201805007 [23] 史忠植.展望智能科学.科学中国人, 2003, (8): 47-49 doi: 10.3969/j.issn.1005-3573.2003.08.021Shi Zhong-Zhi. Outlook intelligent science. Scientific Chinese, 2003, (8): 47-49 doi: 10.3969/j.issn.1005-3573.2003.08.021 [24] 史忠植.智能科学.北京:清华大学出版社, 2006. 1-551Shi Zhong-Zhi. Intelligence Science. Beijing: Tsinghua University Press, 2006. 1-551 [25] 蔡自兴, 王勇.智能系统原理算法与应用.北京:机械工业出版社, 2014. 1-372Cai Zi-Xing, Wang Yong. Intelligent Systems: Principles, Algorithms and Applications. Beijing: China Machine Press, 2014. 1-372 [26] Legg S, Hutter M. A collection of definitions of intelligence. In: Proceedings of the 2007 Advances in Artificial General Intelligence: Concepts, Architectures and Algorithms. Washington, USA: IOS, 2007. 17-24 [27] Legg S, Hutter M. Universal intelligence: a definition of machine intelligence. Minds and Machines, 2007, 17(4): 391-444 doi: 10.1007/s11023-007-9079-x [28] 程红.脊椎动物神经系统的比较.生物学通报, 2000, 35(11): 12-14 doi: 10.3969/j.issn.0006-3193.2000.11.005Cheng Hong. Comparative nervous system of the vertebrates. Bulletin of Biology, 2000, 35(11): 12-14 doi: 10.3969/j.issn.0006-3193.2000.11.005 [29] 王亚亚.脊椎动物的大脑皮层.生物学通报, 2005, 40(1): 20-22 doi: 10.3969/j.issn.0006-3193.2005.01.012Wang Ya-Ya, Cerebral cortex of vertebrate. Bulletin of Biology, 2005, 40(1): 20-22 doi: 10.3969/j.issn.0006-3193.2005.01.012 [30] Baars B J, Gage N M. Cognition, Brain, and Consciousness: Introduction to Cognitive Neuroscience. Beijing: Beijing Science Press, 2012. 1-653 [31] Rose S. The Future of The Brain: The Promise and Perils of Tomorrow's Neuroscience. New York: Oxford University Press, 2006. 1-344 [32] 艾森克M W, 基恩M T[著], 高定国, 肖晓云[译].认知心理学.第4版.上海: 华东师范大学出版社, 2004. 1-557Eysenck M W, Keane M T[Author], Gao Ding-Guo, Xiao Xiao-Yun[Translator]. Cognitive Psychology (Fourth edition). Shanghai: East China Normal University Press, 2004. 1-557 [33] 随婷婷, 王晓峰.一种基于视觉知识加工模型的目标识别方法.自动化学报, 2016, 42(5): 760-770 doi: 10.16383/j.aas.2016.c150207Sui Ting-Ting, Wang Xiao-Feng. A novel object recognition method based on visual knowledge processing model. Acta Automatica Sinica, 2016, 42(5): 760-770 doi: 10.16383/j.aas.2016.c150207 [34] 随婷婷, 王晓峰.一种基于CLMF的深度卷积神经网络模型.自动化学报, 2016, 42(6): 875-882 doi: 10.16383/j.aas.2016.c150741Sui Ting-Ting, Wang Xiao-Feng. Convolutional neural networks with candidate location and multi-feature fusion. Acta Automatica Sinica, 2016, 42(6): 875-882 doi: 10.16383/j.aas.2016.c150741 [35] 林益.一般系统论研究的过去、现在和未来(下).空军工程大学学报(自然科学版), 2002, 3(1): 1-10 doi: 10.3969/j.issn.1009-3516.2002.01.001Lin Yi. The past, present and future of general systems studies (continue). Journal of Air Force Engineering University (Natural Science Edition), 2002, 3(1): 1-10 doi: 10.3969/j.issn.1009-3516.2002.01.001 [36] (von Bertalanffy L[著], 林康义, 魏宏森[译].一般系统论: 基础发展和应用.北京: 清华大学出版社, 1987. 1-279von Bertalanffy L[Author], Lin Kang-Yi, Wei Hong-Sen[Translator]. General System Theory (Fundamentals, Development and Applications). Beijing: Tsinghua University Press, 1987. 1-279 [37] (Goodfellow I, Bengio Y, Courville A[著], 赵申剑, 黎彧君, 符天凡, 李凯[译].深度学习.北京: 人民邮电出版社, 2017. 1-486Goodfellow I, Bengio Y, Courville A[Author], Zhao Shen-Jian, Li Yu-Jun, Fu Tian-Fan, Li Kai[Translator]. Deep Learning. Beijing: Posts & Telecom Press, 2017. 1-486 [38] 周志华.机器学习.北京:清华大学出版社, 2016. 1-425Zhou Zhi-Hua. Machine Learning. Beijing: Tsinghua University Press, 2016. 1-425 [39] 李晨溪, 曹雷, 张永亮, 陈希亮, 周宇欢, 段理文.基于知识的深度强化学习研究综述.系统工程与电子技术, 2017, 39(11): 2603-2613 doi: 10.3969/j.issn.1001-506X.2017.11.30Li Chen-Xi, Cao Lei, Zhang Yong-Liang, Chen Xi-Liang, Zhou Yu-Huan, Duan Li-Wen. Knowledge-based deep reinforcement learning: a review. Systems Engineering and Electronics, 2017, 39(11): 2603-2613 doi: 10.3969/j.issn.1001-506X.2017.11.30 [40] 林懿伦, 戴星原, 李力, 王晓, 王飞跃.人工智能研究的新前线:生成式对抗网络.自动化学报, 2018, 44(5): 775-792 doi: 10.16383/j.aas.2018.y000002Lin Yi-Lun, Dai Xing-Yuan, Li Li, Wang Xiao, Wang Fei-Yue. The new frontier of AI research: generative adversarial networks. Acta Automatica Sinica, 2018, 44(5): 775-792 doi: 10.16383/j.aas.2018.y000002 [41] 罗建豪, 吴建鑫.基于深度卷积特征的细粒度图像分类研究综述.自动化学报, 2017, 43(8): 1306-1318 doi: 10.16383/j.aas.2017.c160425Luo Jian-Hao, Wu Jian-Xin. A survey on fine-grained image categorization using deep convolutional features. Acta Automatica Sinica, 2017, 43(8): 1306-1318 doi: 10.16383/j.aas.2017.c160425 [42] 刘丽, 赵凌君, 郭承玉, 王亮, 汤俊.图像纹理分类方法研究进展和展望.自动化学报, 2018, 44(4): 584-607 doi: 10.16383/j.aas.2018.c160452Liu Li, Zhao Ling-Jun, Guo Cheng-Yu, Wang Liang, Tang Jun. Texture classification: state-of-the-art methods and prospects. Acta Automatica Sinica, 2018, 44(4): 584-607 doi: 10.16383/j.aas.2018.c160452 [43] 张慧, 王坤峰, 王飞跃.深度学习在目标视觉检测中的应用进展与展望.自动化学报, 2017, 43(8): 1289-1305 doi: 10.16383/j.aas.2017.c160822Zhang Hui, Wang Kun-Feng, Wang Fei-Yue. Advances and perspectives on applications of deep learning in visual object detection. Acta Automatica Sinica, 2017, 43(8): 1289-1305 doi: 10.16383/j.aas.2017.c160822 [44] Goodfellow I J, Pouget-Abadie J, Mirza M, Xu B, Warde-Farley D, Ozair S, et al. Generative adversarial nets. In: Proceedings of the 27th International Conference on Neural Information Processing Systems. Montreal, Canada: MIT, 2014. 2672-2680 [45] Ho J, Ermon S. Generative Adversarial Imitation Learning[Online], available: https://arxiv.org/pdf/1606.03476.pdf, February 2, 2017 [46] 著], 陈禹[译].涌现-从混沌到有序.上海: 上海科学技术出版社, 2001. 1-293Holland J[Author], Chen Yu[Translator]. Emergence: From Chaos to Order. Shanghai: Shanghai Science & Technical Publishers, 2001. 1-293 (Holland J[ [47] Wang M, Li H S, Miao Q, Bian G R. Intelligent control algorithm for ship dynamic positioning. Archives of Control Sciences, 2014, 24(4): 479-497 doi: 10.2478/acsc-2014-0026 [48] Xie T H, Lin Y, Chi W, Yang Z Y. Intelligent identification of fires in ship compartments using a Bayesian network. Journal of Marine Science and Technology, 2016, 24(4): 842-850 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5d9b7e2940d8c9e14bd33105dc614d59 [49] Borkowski P. Inference engine in an intelligent ship course-keeping system. Computational Intelligence and Neuroscience, 2017, 2017: Article No.2561383 [50] 吴笑风, 张郑海, 许攸, 范维, 石瑶, 岳宏.基于信息流视角的智能船舶系统模型.舰船科学技术, 2016, 38(10): 14-19 http://d.old.wanfangdata.com.cn/Periodical/jckxjs201610004Wu Xiao-Feng, Zhang Zheng-Hai, Xu You, Fan Wei, Shi Yao, Yue Hong. System model for intelligent ships: an information flow oriented representation. Ship Science and Technology, 2016, 38(10): 14-19 http://d.old.wanfangdata.com.cn/Periodical/jckxjs201610004 [51] 严新平, 吴超, 马枫.面向智能航行的货船"航行脑"概念设计.中国航海, 2017, 40(4): 95-98, 136 doi: 10.3969/j.issn.1000-4653.2017.04.020Yan Xin-Ping, Wu Chao, Ma Feng. Conceptual design of navigation brain system for intelligent cargo ship. Navigation of China, 2017, 40(4): 95-98, 136 doi: 10.3969/j.issn.1000-4653.2017.04.020 [52] 梁云芳, 谢俊元, 陈虎, 季寒, 吴鸿程, 闵婕.智能船舶的发展研究.船舶力学, 2017, (S1): 651-664 http://d.old.wanfangdata.com.cn/Periodical/cblx2017z1080Liang Yun-Fang, Xie Jun-Yuan, Chen Hu, Ji Han, Wu Hong-Cheng, Min Jie. Research and development review on smart ships. Journal of Ship Mechanics, 2017, (S1): 651-664 http://d.old.wanfangdata.com.cn/Periodical/cblx2017z1080 -

 下载:
下载:


图(4) / 表(2)
计量
- 文章访问数: 3882
- HTML全文浏览量: 2040
- PDF下载量: 285
- 被引次数: 0
