

Output Feedback Model Predictive Control for Interval Type-2 T-S Fuzzy Networked Control Systems
-
摘要: 针对干扰作用下的非线性网络控制系统,给出了带一个自由控制作用的输出反馈预测控制方法.首先,利用区间二型T-S模糊模型描述具有参数不确定性的非线性对象,采用马尔科夫链描述系统中的随机丢包过程,由此建立了丢包网络环境下的非线性网络控制系统的数学模型.然后,通过引入二次有界技术得到了干扰作用下网络控制系统的稳定性描述方法,并在此基础上给出了状态观测器的线性矩阵不等式条件.最后,基于估计状态,通过将无穷时域控制作用参数化为一个自由控制作用加一个线性反馈律得到了输出反馈预测控制方法.论文的特色在于构建了在线更新误差椭圆集合的基本方法,满足了约束条件下输出反馈预测控制保证稳定性的要求.仿真例子验证了所提方法的有效性.Abstract: For non-linear networked control systems with bounded disturbances, this paper presents an output feedback predictive control approach with one free control move. Firstly, an interval type-2 T-S fuzzy model is employed to describe the non-linear plant which is subject to parameter uncertainties, and a Markov chain is introduced to characterize the process of stochastic packet loss of the system, thus a mathematical model of non-linear networked control system with packet loss is established. Then, a method of describing the stability for a networked control system with bounded disturbances is obtained by using the technique of quadratic boundedness. With the help of the provided method, the linear matrix inequality conditions of the state observer are given. Finally, based on the estimated state, an output feedback predictive control algorithm is developed which parameterizes the infinite horizon control moves into one free control move and a linear feedback law. The main feature of this paper is that an essential formula for on-line refreshing ellipsoidal bounds of estimation errors is introduced, which meets the requirement of guaranteeing the stability of output feedback predictive control with input constraints. An example is given to demonstrate the effectiveness of the proposed method.
-
Key words:
- Networked control systems /
- predictive control /
- interval type-2 /
- quadratic boundedness
1) 本文责任编委 刘艳军 -
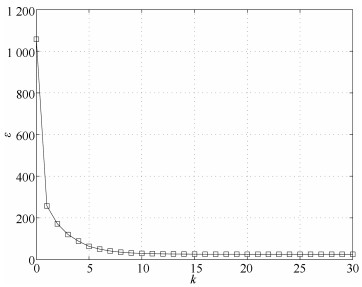
图 6 性能指标上界$\varepsilon$的轨迹
Fig. 6 Evolutions of performance objective upper bound $\varepsilon$
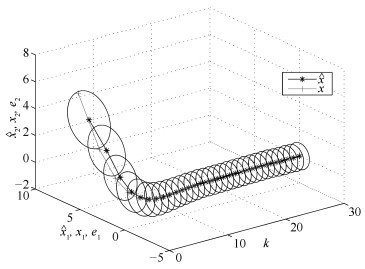
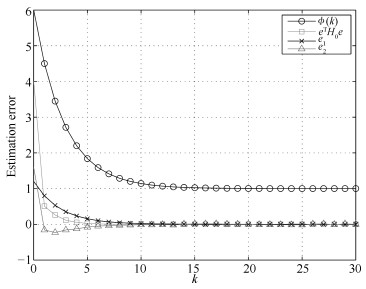
图 8 状态轨迹和估计误差椭圆集合
Fig. 8 State trajectories and ellipsoidal bounds of estimation error
表 1 观测器参数, 性能指标及计算时间
Table 1 Observer parameters, performance objective, and computational time
H0 Lp $J_0^\infty $ TAverage $\left[ \begin{array}{l} 0.7833\;\;\;0.0643\\ 0.0643\;\;\;1.0316 \end{array} \right] $ $\left[ \begin{array}{l} 0.0018\\ 0.5394 \end{array} \right] $ 62.98 0.93 s  下载: 导出CSV
下载: 导出CSV
-
[1] 席裕庚, 李德伟, 林姝.模型预测控制-现状与挑战.自动化学报, 2013, 39(3):222-236 http://www.aas.net.cn/CN/abstract/abstract17874.shtmlXi Yu-Geng, Li De-Wei, Lin Shu. Model predictive control-status and challenges. Acta Automatica Sinica, 2013, 39(3):222-236 http://www.aas.net.cn/CN/abstract/abstract17874.shtml [2] Cutler C R, Ramaker B L. Dynamic matrix control-A computer control algorithm. In:Proceedings of the Joint Automatic Control Conference. San Francisco:American Automatic Control Council, 1980. [3] Rouhani R, Mehra R K. Model algorithmic control (MAC):basic theoretical properties. Automatica, 1982, 18(4):401-414 doi: 10.1016/0005-1098(82)90069-3 [4] 席裕庚, 李德伟.预测控制定性综合理论的基本思路和研究现状.自动化学报, 2008, 34(10):1225-1234 http://www.aas.net.cn/CN/abstract/abstract17992.shtmlXi Yu-Geng, Li De-Wei. Fundamental philosophy and status of qualitative synthesis of model predictive control. Acta Automatica Sinica, 2008, 34(10):1225-1234 http://www.aas.net.cn/CN/abstract/abstract17992.shtml [5] Kothare M V, Balakrishnan V, Morari M. Robust constrained model predictive control using linear matrix inequalities. Automatica, 1996, 32(10):1361-1379 doi: 10.1016/0005-1098(96)00063-5 [6] Cuzzola F A, Geromel J C, Morari M. An improved approach for constrained robust model predictive control. Automatica, 2002, 38(7):1183-1189 doi: 10.1016/S0005-1098(02)00012-2 [7] Lu Y H, Arkun Y M. Quasi-min-max MPC algorithms for LPV systems. Automatica, 2000, 36(4):527-540 doi: 10.1016/S0005-1098(99)00176-4 [8] Schuurmans J, Rossiter J A. Robust predictive control using tight sets of predicted states. IEE Proceedings Control Theory & Applications, 2000, 147(1):13-18 http://cn.bing.com/academic/profile?id=4b8a4f310603adad86ed953f3dc23ccb&encoded=0&v=paper_preview&mkt=zh-cn [9] Kouvaritakis B, Rossiter J A, Schuurmans J. Efficient robust predictive control. IEEE Transactions on Automatic Control, 2000, 45(8):1545-1549 doi: 10.1109/9.871769 [10] Wan Z Y, Kothare M V. An efficient off-line formulation of robust model predictive control using linear matrix inequalities. Automatica, 2003, 39(5):837-846 doi: 10.1016/S0005-1098(02)00174-7 [11] Angeli D, Casavola A, Franzé G, Mosca E. An ellipsoidal off-line MPC scheme for uncertain polytopic discrete-time systems. Automatica, 2008, 44(12):3113-3119 doi: 10.1016/j.automatica.2008.04.027 [12] Wan Z Y, Kothare M V. Robust output feedback model predictive control using off-line linear matrix inequalities. Journal of Process Control, 2002, 12(7):763-774 doi: 10.1016/S0959-1524(02)00003-3 [13] Park J H, Kim T H, Sugie T. Output feedback model predictive control for LPV systems based on quasi-min-max algorithm. Automatica, 2011, 47(9):2052-2058 doi: 10.1016/j.automatica.2011.06.015 [14] Mayne D Q, Raković S V, Findeisen R, Allgöwer F. Robust output feedback model predictive control of constrained linear systems. Automatica, 2006, 42(7):1217-1222 doi: 10.1016/j.automatica.2006.03.005 [15] Li H P, Shi Y. Output feedback predictive control for constrained linear systems with intermittent measurements. Systems & Control Letters, 2013, 62(4):345-354 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=78f03765e5622206611a804992339894 [16] Farina M, Giulioni L, Magni L, Scattolini R. An approach to output-feedback MPC of stochastic linear discrete-time systems. Automatica, 2015, 55:140-149 doi: 10.1016/j.automatica.2015.02.039 [17] Ding B C, Pan H G. Output feedback robust MPC for LPV system with polytopic model parametric uncertainty and bounded disturbance. International Journal of Control, 2016, 89(8):1554-1571 doi: 10.1080/00207179.2016.1138144 [18] Hespanha J P, Naghshtabrizi P, Xu Y G. A survey of recent results in networked control systems. Proceedings of the IEEE, 2007, 95(1):138-162 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e47d717e96da82596eb9456b53ba7d81 [19] Zhang L X, Gao H J, Kaynak O. Network-induced constraints in networked control systems-a survey. IEEE Transactions on Industrial Informatics, 2013, 9(1):403-416 doi: 10.1109/TII.2012.2219540 [20] 游科友, 谢立华.网络控制系统的最新研究综述.自动化学报, 2013, 39(2):101-118 http://www.aas.net.cn/CN/abstract/abstract17806.shtmlYou Ke-You, Xie Li-Hua. Survey of recent progress in networked control systems. Acta Automatica Sinica, 2013, 39(2):101-118 http://www.aas.net.cn/CN/abstract/abstract17806.shtml [21] Selivanov A, Fridman E. Observer-based input-to-state stabilization of networked control systems with large uncertain delays. Automatica, 2016, 74:63-70 doi: 10.1016/j.automatica.2016.07.031 [22] Peng C, Han Q L. On designing a novel self-triggered sampling scheme for networked control systems with data losses and communication delays. IEEE Transactions on Industrial Electronics, 2016, 63(2):1239-1248 doi: 10.1109/TIE.2015.2504044 [23] 张必山, 马忠军, 杨美香.既含有一般多个随机延迟以及多个测量丢失和随机控制丢失的鲁棒H∞模糊输出反馈控制.自动化学报, 2017, 43(9):1656-1664 http://www.aas.net.cn/CN/abstract/abstract19142.shtmlZhang Bi-Shan, Ma Zhong-Jun, Yang Mei-Xiang. Robust H∞ fuzzy output-feedback control with both general multiple probabilistic delays and multiple missing measurements and random missing control. Acta Automatica Sinica, 2017, 43(9):1656-1664 http://www.aas.net.cn/CN/abstract/abstract19142.shtml [24] 李秀英, 王金玉, 孙书利.具有一步随机时滞和多丢包的网络系统H∞滤波器设计.自动化学报, 2014, 40(1):155-160 http://www.aas.net.cn/CN/abstract/abstract18277.shtmlLi Xiu-Ying, Wang Jin-Yu, Sun Shu-Li. H∞ filter design for networked systems with one-step random delays and multiple packet dropouts. Acta Automatica Sinica, 2014, 40(1):155-160 http://www.aas.net.cn/CN/abstract/abstract18277.shtml [25] 马伟伟, 贾新春, 张大伟.双率采样系统的基于观测器的网络化H∞控制.自动化学报, 2015, 41(10):1788-1797 http://www.aas.net.cn/CN/abstract/abstract18753.shtmlMa Wei-Wei, Jia Xin-Chun, Zhang Da-Wei. Observer-based networked H∞ control for dualrate sampling systems. Acta Automatica Sinica, 2015, 41(10):1788-1797 http://www.aas.net.cn/CN/abstract/abstract18753.shtml [26] 肖会芹, 何勇, 吴敏, 肖伸平.基于T-S模糊模型的采样数据网络控制系统H∞输出跟踪控制.自动化学报, 2015, 41(3):661-668 http://www.aas.net.cn/CN/abstract/abstract18642.shtmlXiao Hui-Qin, He Yong, Wu Min, Xiao Shen-Ping. H∞ output tracking control for sampled-data networked control systems in T-S fuzzy model. Acta Automatica Sinica, 2015, 41(3):661-668 http://www.aas.net.cn/CN/abstract/abstract18642.shtml [27] 宋杨, 董豪, 费敏锐.基于切换频度的马尔科夫网络控制系统均方指数镇定.自动化学报, 2012, 38(5):876-881 http://www.aas.net.cn/CN/abstract/abstract13556.shtmlSong Yang, Dong Hao, Fei Min-Rui. Mean square exponential stabilization of Markov networked control systems based on switching frequentness. Acta Automatica Sinica, 2012, 38(5):876-881 http://www.aas.net.cn/CN/abstract/abstract13556.shtml [28] 王炳林, 康宇, 秦家虎, 李彦梅.网路化双线性系统的预测控制优化算法研究.自动化学报, 2017, 43(7):1234-1240 http://www.aas.net.cn/CN/abstract/abstract19096.shtmlWang Bing-Lin, Kang Yu, Qin Jia-Hu, Li Yan-Mei. Optimization algorithms for predictive control approach to networked bilinear systems. Acta Automatica Sinica, 2017, 43(7):1234-1240 http://www.aas.net.cn/CN/abstract/abstract19096.shtml [29] Zhang J H, Xia Y Q, Shi P. Design and stability analysis of networked predictive control systems. IEEE Transactions on Control Systems Technology, 2013, 21(4):1495-1501 doi: 10.1109/TCST.2012.2208967 [30] Pang Z H, Liu G P, Zhou D H. Design and performance analysis of incremental networked predictive control systems. IEEE Transactions on Cybernetics, 2016, 46(6):1400-1410 doi: 10.1109/TCYB.2015.2448031 [31] Tang X M, Ding B C. Model predictive control of linear systems over networks with data quantizations and packet losses. Automatica, 2013, 49(5):1333-1339 doi: 10.1016/j.automatica.2013.02.033 [32] Zou Y Y, Lam J, Niu Y G, Li D W. Constrained predictive control synthesis for quantized systems with Markovian data loss. Automatica, 2015, 55:217-225 doi: 10.1016/j.automatica.2015.03.016 [33] Franzé G, Tedesco F, Famularo D. Model predictive control for constrained networked systems subject to data losses. Automatica, 2015, 54:272-278 doi: 10.1016/j.automatica.2015.02.018 [34] Liu G P, Xia Y Q, Chen J, Rees D, Hu W S. Networked predictive control of systems with random network delays in both forward and feedback channels. IEEE Transactions on Industrial Electronics, 2007, 54(3):1282-1297 doi: 10.1109/TIE.2007.893073 [35] Liu G P. Predictive controller design of networked systems with communication delays and data loss. IEEE Transactions on Circuits & Systems Ⅱ:Express Briefs, 2010, 57(6):481-485 http://cn.bing.com/academic/profile?id=f8d87bda88cb37b882a440fc56910799&encoded=0&v=paper_preview&mkt=zh-cn [36] Zhao Y, Gao H J, Chen T W. Fuzzy constrained predictive control of non-linear systems with packet dropouts. IET Control Theory & Applications, 2010, 4(9):1665-1677 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a15a44b4b7d33170106dd2fbb11c6336 [37] Quevedo D E, Nešić D. Robust stability of packetized predictive control of nonlinear systems with disturbances and Markovian packet losses. Automatica, 2012, 48(8):1803-1811 doi: 10.1016/j.automatica.2012.05.046 [38] 王飞跃, 莫红.关于二型模糊集合的一些基本问题.自动化学报, 2017, 43(7):1114-1141 http://www.aas.net.cn/CN/abstract/abstract19087.shtmlWang Fei-Yue, Mo Hong. Some fundamental issues on type-2 fuzzy Sets. Acta Automatica Sinica, 2017, 43(7):1114-1141 http://www.aas.net.cn/CN/abstract/abstract19087.shtml [39] Lu Q, Shi P, Lam H K, Zhao Y X. Interval type-2 fuzzy model predictive control of nonlinear networked control systems. IEEE Transactions on Fuzzy Systems, 2015, 23(6):2317-2328 doi: 10.1109/TFUZZ.2015.2417975 [40] Lam H K, Li H Y, Deters C, Secco E L, Wurdemann H A, Althoefer K. Control design for interval type-2 fuzzy systems under imperfect premise matching. IEEE Transactions on Industrial Electronics, 2014, 61(2):956-968 doi: 10.1109/TIE.2013.2253064 [41] Xiao B, Lam H K, Li H Y. Stabilization of interval type-2 polynomial-fuzzy-model-based control systems. IEEE Transactions on Fuzzy Systems, 2017, 25(1):205-217 doi: 10.1109/TFUZZ.2016.2554153 [42] Zhang H, Shi Y, Wang J M. Observer-based tracking controller design for networked predictive control systems with uncertain Markov delays. International Journal of Control, 2013, 86(10):1824-1836 doi: 10.1080/00207179.2013.797107 [43] Alessandri A, Baglietto M, Battistelli G. On estimation error bounds for receding-horizon filters using quadratic boundedness. IEEE Transactions on Automatic Control, 2004, 49(8):1350-1355 doi: 10.1109/TAC.2004.832652 -

 下载:
下载:


图(8) / 表(1)
计量
- 文章访问数: 2827
- HTML全文浏览量: 635
- PDF下载量: 609
- 被引次数: 0
