

Path Tracking Lateral Control of Self-driving Vehicles Based on the Optimal State Point
-
摘要: 对于小区、施工导流路段等狭窄区域,很难保证大中型车辆安全地通过.针对这类情况,本文研究了整个车体的路径跟踪横向控制问题,提出了车辆最优状态点和最优参考状态的概念.为了求解最优状态点,本文构造了车辆参考状态所对应的整体偏差这一目标函数,基于车辆运动学模型,依据最优状态点处车辆与参考轨迹的偏差设计了横向控制器,并利用Lyapunov方法证明了该控制系统的稳定性.与车体特定位置的横向偏差相比,整体偏差更为显著地反映了整个车体的跟踪性能.最后,在具有代表性的狭窄区域场景和普通城区道路场景分别进行了仿真实验,结果表明该方法能够有效提高车辆低速行驶时的整体跟踪精度,不仅可以保证车辆安全裕度较大地通过狭窄区域,而且也提升了车辆在城区交通场景驾驶的安全性.Abstract: It is difficult for medium and large vehicles to pass through the narrow area, such as the road of the residential area and the construction diversion. In this paper, the path tracking lateral control problem of the whole vehicle for the above mentioned case is investigated. The optimal state point and the reference state of the vehicle are proposed. In order to select this point, this paper constructs the overall deviation function of the vehicle reference state. In addition, based on the kinematic model, a lateral controller is designed by the deviation from the vehicle to the reference path at this state point. The Lyapunov method is applied to prove the stability of the control system. Compared to the lateral deviation from a particular position, the overall deviation reflects the tracking performance of the whole vehicle more significantly. Finally, simulation results in the typical narrow area and on the urban road are presented to illustrate the higher overall precision of the proposed method for path tracking at low speed. It not only can ensure the vehicle to pass the narrow area with large margin, but also can improve driving safety on the urban road.
-
Key words:
- Narrow area /
- overall deviation /
- optimal state point /
- optimal reference state /
- lateral control
1) 本文责任编委 魏庆来 -
表 1 车辆参数
Table 1 Vehicle parameters
参数 数值 单位 前轮胎侧偏刚度$(C_f)$ 80 000 ${\rm N/rad}$ 后轮胎侧偏刚度$(C_r)$ 80 000 ${\rm N/rad}$ 车辆质量$(m)$ 1 960 ${\rm kg}$ 偏航转动惯量$(I_z)$ 3 580 ${\rm kg\cdot m^2}$ 重心与前轴距离$(l_f)$ 1.300 ${\rm m}$ 重心与后轴距离$(l_r)$ 1.788 ${\rm m}$ 最大转角$(\delta_{\max})$ $\dfrac{\pi}{6}$ ${\rm rad}$  下载: 导出CSV
下载: 导出CSV
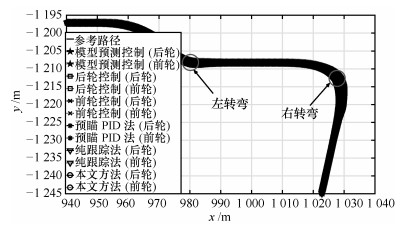
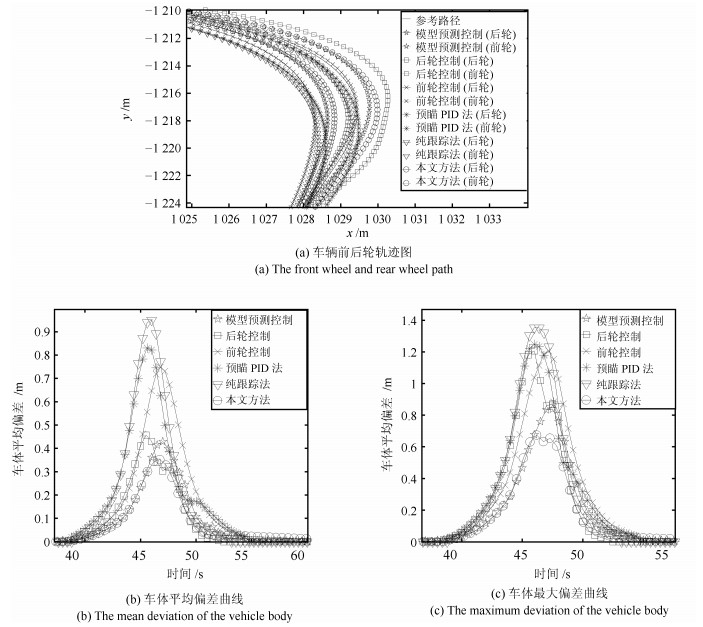
表 2 左转弯场景偏差对比
Table 2 A comparison of the deviation on the left corner
控制方法 车体平均偏差$({\rm m})$ 车体最大偏差$({\rm m})$ 模型预测控制 0.261 0.509 后轮控制 0.234 0.646 前轮控制 0.411 0.673 预瞄PID法 0.519 0.752 纯跟踪法 0.471 0.729 本文方法 0.196 0.418
下载: 导出CSV
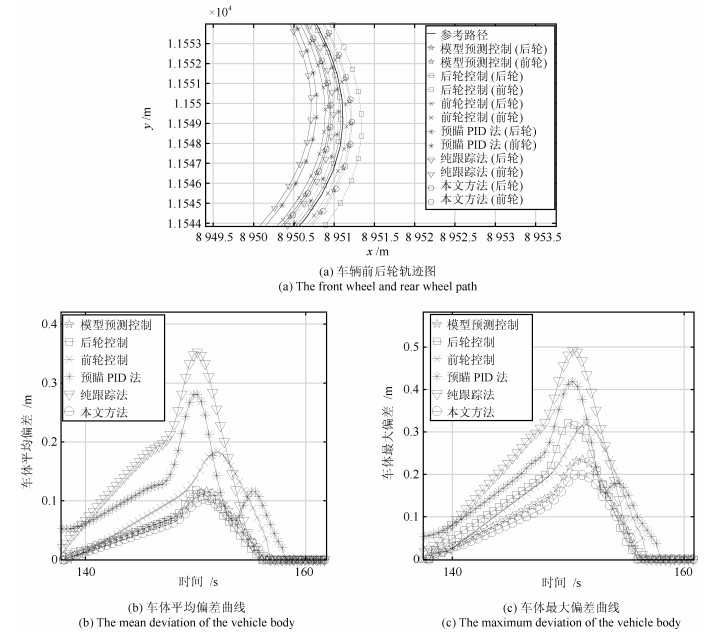
表 3 右转弯场景偏差对比
Table 3 A comparison of the deviation on the right corner
控制方法 车体平均偏差$({\rm m})$ 车体最大偏差$({\rm m})$ 模型预测控制 0.456 0.847 后轮控制 0.461 1.217 前轮控制 0.748 1.207 预瞄PID法 0.839 1.252 纯跟踪法 0.952 1.358 本文方法 0.361 0.673
下载: 导出CSV
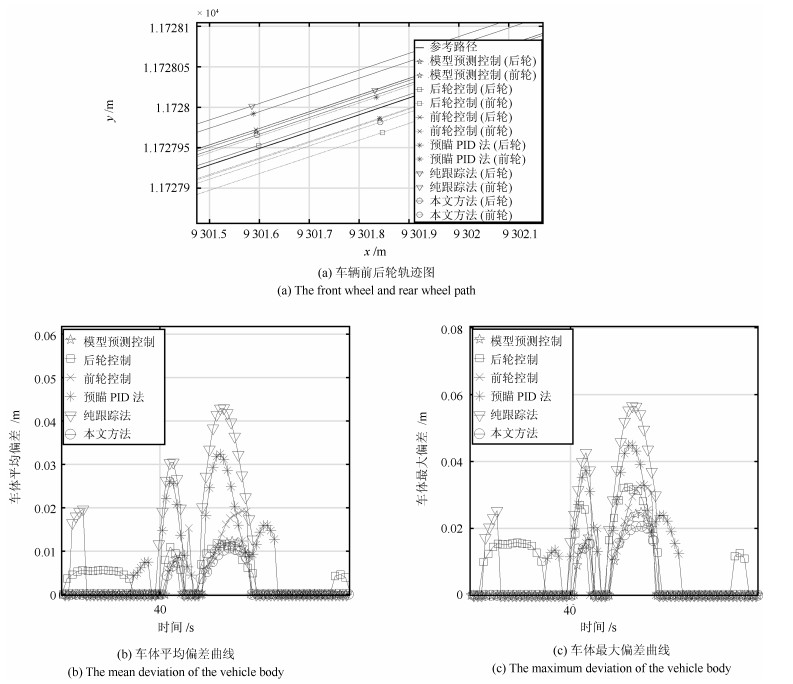
表 4 小曲率弯道场景偏差对比
Table 4 A comparison of the deviation on the small curvature road
控制方法 车体平均偏差$({\rm m})$ 车体最大偏差$({\rm m})$ 模型预测控制 0.012 0.025 后轮控制 0.012 0.033 前轮控制 0.019 0.033 预瞄PID法 0.033 0.045 纯跟踪法 0.043 0.057 本文方法 0.010 0.020
下载: 导出CSV
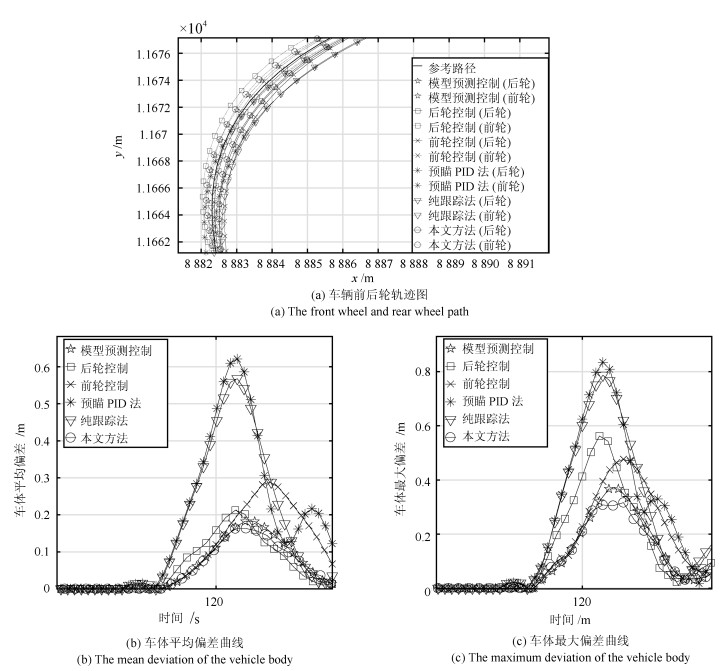
表 5 直角弯道场景偏差对比
Table 5 A comparison of the deviation on the right angle road
控制方法 车体平均偏差$({\rm m})$ 车体最大偏差$({\rm m})$ 模型预测控制 0.185 0.373 后轮控制 0.213 0.567 前轮控制 0.289 0.477 预瞄PID法 0.624 0.836 纯跟踪法 0.574 0.786 本文方法 0.166 0.326
下载: 导出CSV
表 6 "S"型弯道场景偏差对比
Table 6 A comparison of the deviation on the "S" curved road
控制方法 车体平均偏差$({\rm m})$ 车体最大偏差$({\rm m})$ 模型预测控制 0.117 0.236 后轮控制 0.118 0.322 前轮控制 0.183 0.317 预瞄PID法 0.286 0.419 纯跟踪法 0.353 0.492 本文方法 0.103 0.200
下载: 导出CSV
-
[1] 李庆中, 顾伟康, 叶秀清, 项志宇.移动机器人路径跟踪的智能预瞄控制方法研究.机器人, 2002, 24(3):252-255 doi: 10.3321/j.issn:1002-0446.2002.03.013Li Qing-Zhong, Gu Wei-Kang, Ye Xiu-Qing, Xiang Zhi-Yu. A study of intelligent preview control method for mobile robot road following. Robot, 2002, 24(3):252-255 doi: 10.3321/j.issn:1002-0446.2002.03.013 [2] 谭宝成, 王宾.无人驾驶车辆路径跟踪的增量式PID控制.西安工业大学学报, 2016, 36(12):996-1001 http://d.old.wanfangdata.com.cn/Periodical/xagyxyxb201612010Tan Bao-Cheng, Wang Bin. Path following incremental PID control for unmanned vehicle. Journal of Xi'an Technological University, 2016, 36(12):996-1001 http://d.old.wanfangdata.com.cn/Periodical/xagyxyxb201612010 [3] Rajamani R. Vehicle Dynamics and Control. US:Springer, 2006. [4] Raffo G V, Gomes G K, Normey-Rico J E, Kelber C R, Becker L B. A predictive controller for autonomous vehicle path tracking. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(1):92-102 doi: 10.1109/TITS.2008.2011697 [5] Coulter R C. Implementation of The Pure Pursuit Path Tracking Algorithm, Technical Report CMU-RI-TR-92-01, Robotics Institute, Carnegie Mellon University, USA, 1992 [6] Wang W J, Hsu T M, Wu T S. The improved pure pursuit algorithm for autonomous driving advanced system. In:Proceeding of the 2017 IEEE 10th International Workshop on Computational Intelligence and Applications. Hiroshima, Japan:IEEE, 2017. 33-38 [7] Samuel M, Hussein M, Mohamad M B. A review of some pure-pursuit based path tracking techniques for control of autonomous vehicle. International Journal of Computer Applications, 2016, 135(1):35-38 doi: 10.5120/ijca2016908314 [8] Paden B, Stork M, Yong S Z, Yershov D, Frazzoli E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Transactions on Intelligent Vehicles, 2016, 1(1):33-55 doi: 10.1109/TIV.2016.2578706 [9] Hoffmann G M, Tomlin C J, Montemerlo M, Thrun S. Autonomous automobile trajectory tracking for off-road driving:controller design, experimental validation and racing. In:Proceeding of the 2007 American Control Conference. New York, USA:IEEE, 2007. 2296-2301 https://ieeexplore.ieee.org/document/4282788 [10] Snider J M. Automatic Steering Methods for Autonomous Automobile Path Tracking, Technical Report CMU-RI-TR-09-08, Robotics Institute, Pittsburgh, USA, 2009 [11] Samson C. Path following and time-varying feedback stabilization of a wheeled mobile robot. In:Proceeding of the International Conference on Advanced Robotics and Computer Vision, Vol.13. Singapore:IEEE, 1992. 1-5 [12] Shen C, Guo H Y, Liu F, Chen H. MPC-based path tracking controller design for autonomous ground vehicles. In:Proceeding of the 36th Chinese Control Conference. Dalian, China:IEEE, 2017. 9584-9589 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-KZLL201707006231.htm [13] 管欣, 姬鹏, 詹军.转向系统特性参数对中心转向区车辆性能的影响.汽车技术, 2008, 39(11):1-4 doi: 10.3969/j.issn.1000-3703.2008.11.001Guan Xin, Ji Peng, Zhan Jun. Effects of steering system characteristics parameters on on-center performance. Automobile Technology, 2008, 39(11):1-4 doi: 10.3969/j.issn.1000-3703.2008.11.001 [14] Li L, Wang F Y. Advanced Motion Control and Sensing for Intelligent Vehicles. New York:Springer Science & Business Media, 2007. [15] Enkuer E. Lateral MIMO-Control of A Bus[Ph.D. dissertation], Eindhoven University of Technology, 1998 [16] Bundorf R T. The influence of vehicle design parameters on characteristic speed and understeer. SAE Technical Paper 670078, 1967 -

 下载:
下载:



计量
- 文章访问数: 2824
- HTML全文浏览量: 452
- PDF下载量: 242
- 被引次数: 0
