

Nuclear Energy 5.0: New Formation and System Architecture of Nuclear Power Industry in the New IT Era
-
摘要: 本文旨在讨论核能5.0(Nuclear Energy 5.0)的基本概念、体系架构和关键平台技术等问题.首先讨论了核能5.0出现的新智能时代基础,阐述了虚拟数字工业崛起的技术背景.详细叙述了核电工业新形态与体系结构,即平行核能的定义、意义、研究内容、体系架构以及应用领域.接下来讨论了核能5.0中新一代核心技术,包括核能物联网、知识自动化、发展性人工智能、大规模协同演进技术、核能区块链等.最后讨论了核能5.0中在核电系统的具体应用场景与案例,重点是核电工控系统安全评估与核电站数字化仪控系统.Abstract: This paper aims to provide a blueprint for Nuclear Energy 5.0 (NE 5.0), discussing its concept, system architecture and platform technology. We start with a discussion on the social foundation for NE 5.0. Then we illustrate the background of NE 5.0's emergence, which is the rise of virtual digital industry together with its definition, essence, contents, system architecture and application areas. Next we discuss the novel platform technology of NE 5.0 including internet of minds, knowledge automation, developmental artificial intelligence, large-scale co-evolutionary techniques, industrial blockchain, etc. Finally we present two application case studies of NE 5.0 in nuclear power system, i.e., security assessment of nuclear power plant control system and nuclear power plant digital I & C system.
-
Key words:
- Nuclear energy /
- internet of minds /
- knowledge automation /
- parallel system /
- ACP approach /
- blockchain /
- virtual digital industry
-
随着计算机、通信、自动控制和仪器仪表等技术的发展和相互渗透, 传感器、控制器以及执行器通过网络形成闭环构成网络化控制系统 (Networked controlsystems, NCSs)[1-7].
由于低成本、高灵活性及易安装等诸多优点, NCSs已逐步应用于冶金、电站等领域[8-10].然而, 由于网络带宽有限且大量的智能传感设备共享这个带宽, 造成数据包在传输过程中出现网络诱导延时和数据丢包等网络通信约束[11], 同时NCSs中存在噪声干扰, 这必将降低系统性能甚至造成系统不稳定[12-14].因此, 考虑受网络通信约束的滤波研究已经成为NCSs的基本问题之一[15].
目前, 关于网络化滤波研究可分为集中式滤波和分布式滤波[16].集中式网络化滤波主要在单种网络环境下开展研究.如文献[17-19]研究了受网络诱导延时约束的滤波误差系统稳定性.文献[20-22]研究了考虑数据丢包的滤波误差系统稳定性.文献[23]研究了受介质访问受限约束的一类Kalman融合估计问题.然而, 随着网络规模不断扩大和网络结构更加复杂, 集中式滤波方法已经无法满足要求.为此, 国内外学者提出分布式网络化滤波方法.
在分布式网络化滤波系统的研究中, 已有成果主要集中在单种网络环境下开展分布式网络化滤波研究.然而, 针对不同类型噪声, 分布式滤波方法可分为两种: 1) 针对Guass噪声的分布式网络化Kalman滤波, 主要根据最小均方误差准则进行最优滤波器设计[24-26], 如文献[27]研究了受数据丢包约束的分布式网络化Kalman滤波器设计问题. 2) 针对非Guass噪声的分布式网络化 ${H_2}$ 、 ${H_\infty }$ 滤波, 主要基于Wilson提出的 ${H_2}/{H_\infty}$ 性能准则设计滤波器[28-30], 如文献[31-32]考虑网络诱导延时研究了分布式 ${H_\infty}$ 滤波器设计方法; 文献[33-34]考虑数据丢包研究了分布式 ${H_\infty }$ 滤波器设计方法.然而, 以上工作主要在单种网络环境下仅仅考虑网络诱导延时或数据丢包进行分布式滤波研究, 但同时考虑受网络诱导延时和数据丢包约束的分布式滤波研究逐步吸引学者的关注[35].
工业现场目前主要应用基于有线网络的控制系统, 但由于现场环境的复杂性, 单一的有线网络很难或者不能完全满足实际工业要求, 有线和无线相融合的异构网络化系统为此提供了解决途径, 已经在物联网、智能电网和智能工厂中应用, 并引起广大科研工作者和工程技术人员的关注.如文献[36-39]研究了有线无线异构网络集成、实时性能等问题.然而, 与传统的单种网络化系统相比, 有线无线异构网络化系统具有以下新特征[40]: 1) 无线和有线网络具有不同的网络协议 (其带宽及传输模式等不同) 使得每种网络的通信约束不同; 2) 无线传感器分布在不同的地理空间使得同一时刻在每个无线通道中传输的信号所受的网络通信约束不尽相同; 3) 有线无线异构网络环境动态变化使得在不同时刻传输的信号所受的网络通信约束也不尽相同.现有的单种网络化分布式滤波方法已不再适用于有线无线异构网络化系统, 因此必须研究受有线无线异构网络通信约束的分布式 ${H_2}/{H_\infty}$ 滤波.
本文在前期研究的受有线无线异构网络诱导延时约束的集中式 ${H_2}/{H_\infty}$ 滤波基础上[41], 从分布式滤波角度深入研究受有线无线异构网络诱导延时和数据丢包约束的分布式网络化 ${H_2}/{H_\infty}$ 滤波问题, 主要理论贡献包括: 1) 采用Markov链和伯努利分布分别描述分布式有线无线网络诱导延时和数据丢包特性, 建立了融合分布式滤波器参数、有线无线异构网络通信约束的普适滤波误差动态系统综合模型; 2) 证明了在分布式有线无线异构网络通信约束下所设计的滤波器使得滤波误差动态系统随机稳定且满足给定的 ${H_2}/{H_\infty}$ 性能指标, 并建立了滤波误差系统随机稳定性、分布式滤波器参数及最长有线无线异构网络诱导延时和数据丢包之间的关系.
1. 问题描述
1.1 分布式有线无线异构网络特性分析
分布在不同地理空间的传感器和滤波器通过有线无线异构网络进行通信, 构成了分布式 ${H_2}/{H_\infty }$ 滤波系统, 如图 1所示.N个无线传感器构成无线网络, 在每个采样时刻如在第k个采样时刻, 传感器的测量信号为: $\left\{ {{y_1}(k), \cdots, {y_i}(k), \cdots, {y_N}(k)} \right\}$ , 然后传感器通过无线网络将测量信号传输到局部融合中心并进行加权融合, 即: $\left\{ {{{\tilde y}_1}(k), \cdots, {{\tilde y}_i}(k), \cdots, {{\tilde y}_N}(k)} \right\}$ , 进一步被传输到对应的网关, 通过协议转换将无线网络数据格式的信号转换成相应的有线网络数据格式的信号, 即: $\left\{ {{{\hat y}_1}(k), \cdots, {{\hat y}_i}(k), \cdots, {{\hat y}_N}(k)} \right\}$ , $i=1, 2, \cdots, N$ , 最后分别通过有线网络传输到对应的滤波器, 由于有线网络是一条物理通道, 故它们可以看作是通过N个虚拟通道传输到对应的N个滤波器.传感器采用时间驱动且采样周期均为T.
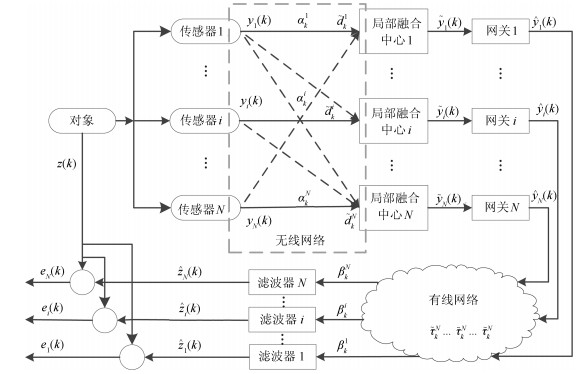 图 1 分布式有线无线异构网络化 ${H_2}/{H_\infty }$ 滤波示意图Fig. 1 Distributed ${H_2}/{H_\infty }$ filtering for hybridwired-wireless networked systems
图 1 分布式有线无线异构网络化 ${H_2}/{H_\infty }$ 滤波示意图Fig. 1 Distributed ${H_2}/{H_\infty }$ filtering for hybridwired-wireless networked systems为了描述无线网络通信拓扑特征, 本文采用有向图 $G=\left ({\upsilon, E, W}\right)$ 来刻画传感器到局部融合中心的分布式无线通信拓扑特征, 其中 $\upsilon=\left\{ {1, 2, \cdots, N} \right\}$ 为节点集, 可表示传感器节点或局部融合中心节点; $E \subseteq \upsilon \times\upsilon $ 为边集, $\left ({i, j} \right) \in E$ 表示传感器i和局部融合中心J进行通信, $i, {\kern 1pt} j \in\upsilon $ ; $W=\left[{{w_{ij}}} \right] \in {\mathbf{R} ^{N \times N}}$ 为邻接加权矩阵, 并且与边相连的邻接元素 ${w_{ij}}$ 是一个正数, 即: ${w_{ij}} > 0 \Leftrightarrow \left ({i, j} \right) \in E$ ; 否则, ${w_{ij}}=0$ .局部融合中心J的邻居集定义为 ${N_j}=\left\{ {i \in \upsilon :\left ({i, j} \right) \in E} \right\}$ .
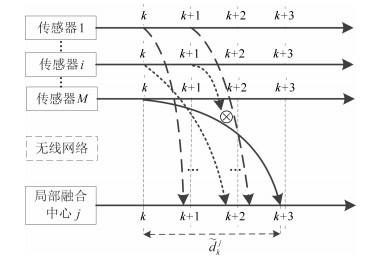
在图 1中, 信号在无线和有线网络中传输均会出现网络诱导延时和数据丢包.在无线网络中, 由于传感器和局部融合中心分别被部署在不同的地理空间, 每个局部融合中心与它相邻的 $M~(M \le N)$ 个传感器通过无线网络通信, 这将产生M个无线传输通道且每个通道均出现网络诱导延时和数据丢包, 故导致整个无线网络中的网络诱导延时和数据丢包呈现分布式特性.例如第J个局部融合中心与它邻域的M个传感器通过无线网络通信, 如图 2所示 (" $\otimes $ "表示网络数据丢包), 在第k个采样时刻每个通道会出现网络诱导延时 $\tilde d_{ij}^j (k)$ 或数据丢包 $\alpha _k^i$ , $i \in {N_j}$ .对于网络诱导延时, 由于无线传感器分布在不同的地理空间, 使得在第k个采样时刻每个无线通道中传输的信号所受的网络诱导延时不尽相同, 即 $\tilde d_{1j}^j (k) \ne \tilde d_{2j}^j (k)=\cdots=\tilde d_{ij}^j (k) \ne \cdots \ne \tilde d_{Mj}^j (k)$ .本文采用最大网络诱导延时策略[32], 则第J个局部融合中心与它的邻域M个传感器之间, 每个无线传输通道中的网络诱导延时均设为它们之中的最大值 (简称为第J个局部融合中心的网络诱导延时), 即 $\tilde d_k^j=\max \left\{ {\tilde d_{ij}^j (k), i \in {N_j}} \right\}$ , 因此在第k个采样时刻, 对于所有N个局部融合中心的网络诱导延时分别为 ${\tilde d_k}=\left[{\tilde d_k^1, \cdots, \tilde d_k^j, \cdots, \tilde d_k^N} \right]$ , 且每个局部融合中心的网络诱导延时在同一时刻不尽相同, 即: $\tilde d_k^i=\tilde d_k^{{j }}$ 或 $\tilde d_k^i \ne \tilde d_k^{{j }}$ , $i, {j } \in v$ .对于数据丢包, 在第k个采样时刻, 当第i个无线传感器发送的信号丢失时, 在本文中则认为与它通信的所有局部融合中心均未收到信号, 故它与所有局部融合中心之间无线通道中传输的信号所受数据丢包特性相同, 即均为 $\alpha _k^i$ 且等于0, 表示数据丢包; 否则, 为1表示数据包成功传输.
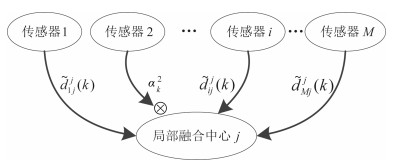 图 2 传感器到局部融合中心J的通信拓扑示意图Fig. 2 Communication topology from sensors to local fusioncenter J
图 2 传感器到局部融合中心J的通信拓扑示意图Fig. 2 Communication topology from sensors to local fusioncenter J注1.对于每个局部融合中心, 以上分析采用最大网络诱导延时策略, 如第J个局部融合中心设置一个缓冲区保存其邻域中每个传感器的测量数据, 当邻域中所有传感器的测量信号到达, 立即运用 $\tilde d_k^j=\max\left\{ {\tilde d_{ij}^j (k), i \in {N_j}}\right\}$ 计算最大网络诱导延时.然而, 在最大网络诱导延时内, 有的传感器多个测量信号到达, 则采用最新数据包[31-32].为了进一步解释, 以第J个局部融合中心为例如图 3所示, 若相邻的M个传感器到第J个局部融合中心的最大网络诱导延时为3, 则根据最新数据包策略, 采用传感器1的测量信号为 (k+1) 时刻的值, 也即在这个最大网络诱导延时内k和 (k+1) 时刻的测量值中选最新的数据包, 即 (k+1) 时刻值.
在有线网络中, 在第k个采样时刻, 网关与相应的滤波器通过有线网络通信也会出现网络诱导延时 $\tilde\tau_k^i, ~~i \in \upsilon$ 和数据丢包 $\beta _k^j, ~~j \in \upsilon$ .由于有线网络是一条物理通道, 在同一时刻, N个虚拟通道的网络诱导延时相同, 即:在同一时刻, N个有线通道所受的网络诱导延时相同[41], 即: ${\tilde\tau _k}=\tilde\tau _k^1=\cdots=\tilde\tau _k^i=\cdots=\tilde\tau _k^N$ .同理, 信号在有线网络中传输所受数据丢包特性也相同, 即: ${\beta _k}=\beta _k^1=\cdots=\beta _k^i=\cdots=\beta_k^N$ , 且 $\beta _k^i$ $(i \in \upsilon)$ 等于0, 表示数据丢包; 否则, 为1表示数据包成功传输.
注2.由于无线和有线网络具有不同的网络协议, 故信号在无线和有线网络中传输时所受的网络诱导延时和数据丢包特性不尽相同.此外, 由于有线无线异构网络环境动态变化, 因此每种网络在不同时刻所受的网络诱导延时和数据丢包特性也是时变的.
针对无线和有线网络中的网络诱导延时, 可以采用有线无线网络分析工具 (如无线网络AiroPeek和以太网Ethereal等) 捕获数据包, 然后根据数据包的类型标识、序号和时间戳等标记分析数据包是否正常或延时, 再运用统计分析方法建立马尔科夫模型, 如文献[42-44]通过分析数据包的延时概率特性详尽描述了建立马尔科夫模型的过程和有效性.因此, 本文借鉴已有采用马尔科夫链描述网络诱导延时特性的方法, 来进一步刻画无线和有线数据包在每个通道中传输出现的网络诱导延时特性.
在运用马尔科夫链来刻画无线和有线网络中的网络诱导延时特性之前, 首先采用文献[45]中将网络诱导延时转化为采样周期最小整数倍的策略, 即:将无线和有线网络中的网络诱导延时 ${\tilde d^i_k}$ 和 ${\tilde \tau^i_k}$ 转换为 ${d^i_k}=\left\lceil {{{\tilde d}^i_k}}\right\rceil$ 和 ${\tau^i _k}=\left\lceil {{{\tilde \tau }^i_k}}\right\rceil$ , 且 ${d_k^i} \in N_s=\left\{ {0, 1, \cdots, d}\right\}$ 和 ${\tau _k^i} \in M_s=\left\{ {0, 1, \cdots, \tau }\right\}$ , 其中 $d$ 和 $\tau$ 分别为无线和有线网络的最大网络诱导延时, $i\in \upsilon $ .然后采用两个不同的马尔科夫链, 分别描述两个相邻采样时刻无线和有线网络诱导延时的转移特性.以第i个通道为例, 在第k个采样时刻, 第i个局部融合中心的无线网络诱导延时为 $d_k^i$ , 然后数据传输到第i个网关通过有线网络传输到第i个滤波器所受的有线网络诱导延时为 $\tau_k^i$ , 则到第 (k+1) 个采样时刻, 它们的转移概率为
$ \begin{align}\left\{\begin{array}{l}\pi _{{r_i}{s_i}}^i = \Pr (d_{k + 1}^i = {s_i}|d_k^i = {r_i})\\\lambda _{{\iota_i}{l_i}}^i = \Pr (\tau _{k + 1}^i = {l_i}|\tau_k^i = {\iota _i})\end{array} \right.\label{eq1}\end{align}$
(1) 式中, $i \in \upsilon $ , 对于所有 ${\iota _i}, {l_i} \in M_s$ 和 ${r_i}, {s_i} \in N_s$ , 有 ${\lambda^i _{{\iota _i}{l_i}}}, {\kern 1pt} {\pi^i _{{r_i}{s_i}}} \ge 0$ , $\sum\nolimits_{l=0}^\tau {{\lambda^i _{{\iota _i}{l_i}}}}=1$ , $\sum\nolimits_{{s_i}=0}^d {{\pi^i _{{r_i}{s_i}}}}=1$ .因此, 无线和有线网络中的网络诱导延时特性的概率转移矩阵分别为 $\Pi \in\left[{{\pi _{rs}}} \right]$ 和 $\Lambda \in \left[{{\lambda_{\iota l}}} \right]$ .
注3.在无线网络中, 采用马尔科夫链 $\Pi$ 来刻画无线通道的网络诱导延时, 但由于在同一时刻每个无线通道的网络诱导延时不尽相同, 故其对应的马尔科夫链状态转移概率在同一时刻也不尽相同.然而, 在有线网络中, 由于在同一时刻每个虚拟有线通道的网络诱导延时相同, 故其对应的马尔科夫链状态转移概率在同一时刻也相同.
针对无线和有线网络中的数据丢包问题, 采用两个不同的伯努利分布分别刻画无线和有线网络中数据丢包 $\alpha_k^i$ 和 $\beta _k^i$ 的随机特性, 满足 ${\mathop{\rm Prob}\nolimits}\left\{ {\alpha _k^i=1} \right\}={ \alpha}, {\mathop{\rm Prob}\nolimits} \left\{ {\alpha _k^i=0} \right\}={ 1-\alpha}, 0 < { \alpha} \le 1$ ; ${\mathop{\rm Prob}\nolimits} \left\{ {\beta_k^i=1} \right\}={ \beta}, {\mathop{\rm Prob}\nolimits}\left\{ {\beta _k^i=0} \right\}={ 1-\beta}, 0 < {\beta} \le1$ , $i \in v$ .
以上独立分析了无线和有线网络中的网络诱导延时和数据丢包, 为了建立系统综合模型, 需进一步深入分析从传感器到滤波器之间有线无线网络诱导延时, 从图 1中可以发现有线无线网络诱导延时由无线和有线网络诱导延时共同构成, 如图 4所示.如第i个滤波器在第k个采样周期收到信号, 且该信号在有线网络中的网络诱导延时为 $\tau _k$ , 则可知网关在 $(k-\tau_k)$ 时刻发送该信号, 进一步可知其在无线网络中传输所受的网络诱导延时可表示为 $d_{k -{\tau_k}}^i$ .因此, 对于所有N个传感器的信号通过有线无线异构网络传送到达对应滤波器, 其有线无线异构网络诱导延时分别包括有线网络诱导延时 ${\tau _k}=\left[{\tau _k^1, \cdots, \tau _k^i, \cdots, \tau _k^N} \right]$ 和无线网络诱导延时 ${d_{k -{\tau _k}}}=\left[{d_{k-{\tau_k}}^1, \cdots, d_{k-{\tau _k}}^i, \cdots, d_{k-{\tau _k}}^N}\right]$ , $i \in v$ .
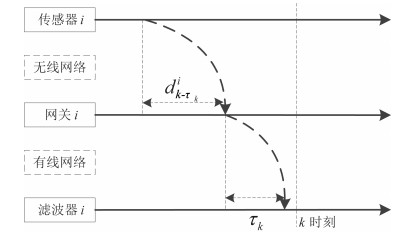 图 4 k时刻信号在有线无线异构网络的传输时序图Fig. 4 Timing diagram of signal through hybridwired-wireless networks at the $k{\rm th}$ instant
图 4 k时刻信号在有线无线异构网络的传输时序图Fig. 4 Timing diagram of signal through hybridwired-wireless networks at the $k{\rm th}$ instant注4.如果从 $d_{k -1}^i$ 跳变到 $d_k^i$ 的转移概率为 $\Pi $ , 则从 $d_{k -{\tau _{k +1}}}^i$ 跳变到 $d_k^i$ 的转移概率矩阵为 ${\Pi ^{{\tau _{k + 1}}}}$ , 且它仍是Markov链的一个转移概率矩阵[44].特殊情况下, 若 ${\tau _{k + 1}}=0$ , 那么转移概率矩阵 ${\Pi ^{{\tau _{k + 1}}}}={\Pi ^0}=I$ .
注5.在无线网络中, 对于每个传输通道在同一时刻网络诱导延时不尽相同, 设定每个通道的最长网络诱导延时均为 $d$ , 则从k时刻到 (k+1) 时刻有 $(d + 1)^N$ 种跳变状态.然而, 在有线网络中, 对于每个传输通道在同一时刻网络诱导延时相同, 设定最长网络诱导延时为 $\tau $ , 则从k时刻到 (k+1) 时刻有 $(\tau +1)$ 种跳变状态.因此, 考虑有线无线异构网络诱导延时, 则有 $f$ 种跳变状态, 即: $\Im=\left\{ {1, 2, \cdots, f} \right\}$ , 其中, $f={\left ({d + 1} \right)^N}\left ({\tau + 1} \right)$ .
1.2 系统描述
$\begin{align}\left\{ \begin{array}{l}x(k + 1) = Ax(k) + B\omega (k)\\z(k) = Lx(k)\end{array} \right.\end{align}$
(2) 且通过带有N个分布式传感器节点的无线网络的测量输出为
$\begin{align}{y_i}(k) = {C_i}x(k), ~~~ i \in \upsilon = \left\{ {1, 2, \cdots, N}\right\}\end{align}$
(3) 式中, $x (k) \in {\mathbf{R}^m}$ 为系统的状态; $\omega (k) \in {{\mathbf{R}}^q}$ 为系统中能量有界的干扰信号, 即: $\omega (k)$ 属于 ${\ell_2}\left[{0, \infty } \right)$ ; $z (k) \in {{\mathbf{R}}^g}$ 为系统的被调输出; ${y_i}(k) \in {{\mathbf{R}}^n}$ 为第i个传感器的测量输出; $A$ , $B$ , $L$ 和 $C_i$ , $i \in\upsilon $ 为已知适当维数的常数矩阵.
为了描述第i个局部融合中心的输出, 首先需要知道它接收到邻域中每个传感器通过无线网络传输的测量信号.在图 1中, 如第i个局部融合中心通过无线网络接收到的第i个传感器测量信号:
$\begin{align}{\bar y_i}(k) = \alpha _k^i{y_i}(k-d^i_k)= \alpha_k^i{C_i}x(k-d^i_k)\end{align}$
(4) 因此, 第i个局部融合中心接收所有 $M\ (M \le N)$ 个邻域传感器信号后的融合输出为
$\begin{align}{\tilde y_i}(k) = \sum\limits_{j \in {N_i}} {{w_{ij}}{{\bar y}_j}(k-d^j_k)}\end{align}$
(5) 第i个局部融合中心融合后的输出信号传输到网关, 然后通过有线网络传送到第i个滤波器, 其收到的信号为
$\begin{align}&{{\hat y}_i}(k) = \beta _k^i{{\tilde y}_i}(k- \tau _k^i- d_{k- \tau _k^i}^i)=\notag\\&\qquad \beta _k^i\sum\limits_{j \in {N_i}} {{w_{ij}}{{\bar y}_j}(k - \tau _k^j - d_{k - \tau _k^j}^j)}\end{align}$
(6) 采用文献[46]考虑输出外部干扰的方法, 第i个滤波器接受的对应信息 ${\hat y}_i (k)$ 为
$\begin{align}&{{\hat y}_i}(k) = {\beta _k}\sum\limits_{j \in {N_i}} {{w_{ij}}{{\bar y}_j}(k - \tau _k^j - d_{k - \tau _k^j}^j)} =\notag\\&\quad {\beta _k}\sum\limits_{j \in {N_i}} {{w_{ij}}{\alpha _k^j}{C_j}x(k - \tau _k^j - d_{k - \tau _k^j}^j)} +{D_i}\omega (k)=\notag\\&\quad \left( {{I_{all}} - {I_{ch}}} \right){\beta _k}\sum\limits_{j \in {N_i}} {{w_{ij}}{\alpha _k^j}{C_j}x(k)} + \notag\\&\quad {I_{ch}}{\beta _k}\sum\limits_{j \in {N_i}}{{w_{ij}}{\alpha _k^j}{{\bar C}_j}\bar X(k)} + {D_i}\omega (k)\end{align}$
(7) 式中, ${I_{ch}}$ 为 $I$ (即存在网络诱导延时) 或0(即不存在网络诱导延时), ${I_{all}}$ 是元素全为1的矩阵, ${{\bar C}_j}=\left[{{array}{*{20}{c}} 0& \cdots &{{C_j}}& \cdots&0{array}} \right]$ , $\bar X (k)={\left[{{array}{*{20}{c}}{{x^{\rm T}}(k-1)}&{{x^{\rm T}}(k-2)}& \cdots &{{x^{\rm T}}(k-d-\tau)}{array}} \right]^{\rm T}}$ , 其中状态 $x (k -{\tau _k} -{d_{k -{\tau _k}}})$ 对应的元素为矩阵 ${C_j}$ , 其他均为0矩阵.
根据以上定义的 $\bar X (k)$ , 可得:
$\begin{align}\bar X(k + 1) = {A_1}x(k) + {A_2}\bar X(k)\end{align}$
(8) 式中
$ {A_1} = \left[{\begin{array}{*{20}{c}}{{I_{m \times m}}}\\{{0_{m \times m}}}\\ \vdots \\0 \end{array}} \right] {A_2} = \left[{\begin{array}{*{20}{c}}{{0_{m \times m}}}&0& ... &0&0\\{{I_{m \times m}}}&0& ... &0&0\\0&{{I_{m \times m}}}& ... &0&0\\ \vdots&\vdots&\ddots&\vdots&\vdots \\0&0& ... &{{I_{m \times m}}}&0\end{array}} \right] $
对于第i个滤波器, 设计如下模式依赖全阶滤波器:
$\begin{align}\left\{ \begin{array}{l}{{\hat x}_i}(k + 1) = {A_i}({\tau _k}, {d_{k - {\tau _k}}}){{\hat x}_i}(k)+\\ \qquad {B_i}({\tau _k}, {d_{k - {\tau _k}}}){{\hat y}_i}(k)\\{{\hat z}_i}(k) = {C_i}({\tau _k}, {d_{k - {\tau _k}}}){{\hat x}_i}(k)\end{array} \right.\end{align}$
(9) 式中, ${\hat x_i}(k) \in {\mathbf{R} ^m}$ 为第i个滤波器状态, ${\hat z_i}(k) \in {\mathbf{R} ^g}$ 为第i个滤波器对 $z (k)$ 的估计值, ${\hat y_i}(k) \in {\mathbf{R} ^n} $ 为第i个滤波器的输入, ${A_i}({\tau_k}, {d_{k -{\tau _k}}})$ 、 ${B_i}({\tau _k}, {d_{k -{\tau_k}}})$ 和 ${C_i}({\tau _k}, {d_{k -{\tau_k}}})$ 为待设计的滤波器参数.
为了描述方便, 下文将 ${\tau _k}$ 、 ${\tau _{k + 1}}$ 、 ${d_{k -{\tau_k}}}$ 和 ${d_{k + 1 -{\tau _{k + 1}}}}$ 记为: ${\tau _k}=\iota$ 、 ${\tau _{k + 1}}=l$ 、 ${d_{k -{\tau _k}}}=r$ 和 ${d_{k + 1 -{\tau _{k + 1}}}}=s$ , 其中, $r=\left[{{array}{*{20}{c}}{{r_1}}& \cdots &{{r_i}}& \cdots &{{r_N}}{array}} \right]$ , $s=\left[{{array}{*{20}{c}}{{s_1}}& \cdots &{{s_i}}& \cdots &{{s_N}}{array}} \right]$ .因此, 式 (9) 可进一步改写为
$\begin{align}\left\{ \begin{array}{l}{{\hat x}_i}(k + 1) = {A_i}(\iota, r){{\hat x}_i}(k) + {B_i}(\iota, r){{\hat y}_i}(k)\\{{\hat z}_i}(k) = {C_i}(\iota, r){{\hat x}_i}(k)\end{array} \right.\label{eq10}\end{align}$
(10) 将式 (7) 代入式 (10), 则滤波器可进一步写为
$\begin{align}\left\{ \begin{array}{l}{{\hat x}_i}(k + 1) = {A_i}(\iota, r){{\hat x}_i}(k) + {B_i}(\iota, r) \times \\\quad \left[{\left( {{I_{all}}-{I_{ch}}} \right){\beta_k}\sum\limits_{j \in {N_i}} {{w_{ij}}{\alpha _k^j}{C_j}x(k)} + } \right.\\\quad \left. {{I_{ch}}{\beta _k}\sum\limits_{j \in {N_i}}{{w_{ij}}{\alpha _k^j} {{\bar C}_j}\bar X(k)} + {D_i}\omega (k)} \right]\\{{\hat z}_i}(k) = {C_i}(\iota, r){{\hat x}_i}(k)\end{array} \right.\end{align}$
(11) 对上式进行化简为
$\begin{align}\left\{ \begin{array}{l}{{\hat x}_i}(k + 1) = {A_i}(\iota, r){{\hat x}_i}(k) + \\\quad {\beta _k}{\alpha_k}{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over w} }_i}{B_i}(\iota, r)\left( {{I_{all}} - {I_{ch}}}\right){\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over C} }x(k) + \\\quad {\beta _k}{\alpha_k}{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over w} }_i}{B_i}(\iota, r){I_{ch}}{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\frown$}}\over C} }\bar X(k) + {B_i}(\iota, r){D_i}\omega (k)\\{{\hat z}_i}(k) = {C_i}(\iota, r){{\hat x}_i}(k)\end{array} \right.\label{eq12}\end{align}$
(12) 式中, ${{\alpha }_{k}}=vec_{{{N}_{i}}}^{j}\left\{ \alpha _{k}^{j} \right\},\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{w}i=\text{diag}_{{{N}_{i}}}^{j}\left\{ {{w}_{ij}} \right\},\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\smile}$}}{C}=col_{{{N}_{i}}}^{j}\left\{ {{C}_{j}} \right\},\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\frown}$}}{C}=col_{{{N}_{i}}}^{j}\left\{ {{{\bar{C}}}_{j}} \right\},j\in {{N}_{i}}$ .
定义 ${\xi _i}(k)={\left[{{array}{*{20}{c}} {{x^{\rm T}}(k)}&{\hat x_i^{\rm T}(k)}&{{{\bar X}^{\rm T}}(k)}{array}} \right]^{\rm T}}$ , 误差 $e_i (k)=z (k) -{\hat z_i}(k)$ .由式 (2)、(8) 和式 (12) 可得到第i个滤波误差动态系统:
$\begin{align}\left\{ \begin{array}{l} {\xi _i}(k + 1) = \left( {{{\tilde A}_i}(\iota, r) + \left( { \beta {\tilde \alpha } - {\beta_k}{\alpha _k}}\right){{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} }_i}(\iota, r)} \right)\times\\\quad {\xi _i}(k)+{{\tilde B}_i}(\iota, r)\omega (k)\\{e_i}(k) = {{\tilde C}_i}(\iota, r){\xi _i}(k)\end{array} \right.\label{eq13}\end{align}$
(13) 式中
$ {{\tilde A}_i}(\iota, r) = \left[{\begin{array}{*{20}{c}}A&0&0\\{\beta {{\tilde \alpha}_i}{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over w} }_i}{\varsigma _i}(\iota, r)}&{{A_i}(\iota, r)}&{\beta{{\tilde \alpha}_i}{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over w} }_i}{\zeta _i}(\iota, r)}\\{{A_1}}&0&{{A_2}}\end{array}} \right] \\ {{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} }_i}(\iota, r) = \left[{\begin{array}{*{20}{c}}0&0&0{-{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over w} }_i}{\varsigma _i}(\iota, r)}&0&{-{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over w} }_i}{\zeta _i}(\iota, r)}\\0&0&0\end{array}} \right] \\ {\tilde B_i}(\iota, r) = \left[{\begin{array}{*{20}{c}}B\\{{B_i}(\iota, r){D_i}}\\0 \end{array}} \right]\\ {\tilde C_i}(\iota, r) = \left[{\begin{array}{*{20}{c}}L&{-{C_i}(\iota, r)}&0\end{array}} \right] \\{\varsigma _i}(\iota, r) = {B_i}(\iota, r)\left( {{I_{all}} -{I_{ch}}}\right)\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over C} \\{\zeta _i}(\iota, r) = {B_i}(\iota, r)\left( {{I_{all}} -{I_{ch}}}\right)\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\frown$}}\over C}, \tilde \alpha = vec_{{N_i}}\left\{ {{\alpha }}\right\} $
为了获得N个滤波误差动态系统的综合模型, 定义 $\xi (k)=col_N^i\left\{ {{\xi _i}(k)} \right\}$ , $e (k)=col_N^i\left\{{{e_i}(k)} \right\}$ , 则N个滤波器的滤波误差动态系统综合模型为
$\begin{align}\left\{ \begin{array}{l} \xi (k + 1) = \left( {\tilde A(\iota, r)+ ( \beta {\tilde \alpha } - {\beta _k}{\alpha_k})\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} (\iota, r)} \right)\\\quad \xi (k) + \tilde B(\iota, r)\omega (k)\\e(k) = \tilde C(\iota, r)\xi (k)\end{array} \right.\label{eq14}\end{align}$
(14) 式中, .
注6.在模型 (14) 中不但融合了分布式有线无线异构网络诱导延时和数据丢包参数, 而且包括分布式滤波器参数, 与考虑单一网络通信约束的分布式滤波误差系统模型[28-29, 32-33]相比更具普适性, 也即单网络环境下的分布式滤波误差系统模型可看作是其特例.
本文研究的受有线无线异构网络诱导延时和数据丢包约束的分布式 ${H_2}/{H_\infty}$ 滤波问题是:
1) 在外部扰动 $\omega (k)=0$ 的情况下, 滤波误差动态系统是随机稳定, 如果对任意初始状态 $({\varphi _0}, {s_0})$ , 存在:
$\begin{align}\mathop {\lim }\limits_{l \to \infty } \sum\limits_{k = 0}^l {{\rm E}({x^{\rm T}}(k)x(k)) < \infty }\end{align}$
(15) 2) 在零初始条件下, 滤波误差动态系统满足 ${H_2}/{H_\infty}$ 性能 $\gamma (\gamma > 0)$ , 即:
$\begin{align}{\rm E}(\left\| e \right\|_\infty ^2) < {\gamma ^2}{\rm E}(\left\|{\omega (k)} \right\|_2^2), \quad \forall \omega (k) \ne 0\end{align}$
(16) 式中, $\left\| e \right\|_\infty ^2=\mathop {\sup }\nolimits_k\left\{ {{e^{\rm T}}(k) e (k)} \right\}$ , $\left\| {\omega (k)}\right\|_2^2=\sum\nolimits_{k=0}^\infty {{\omega ^{\rm T}}(k)\omega (k)}.$
2. 主要结果
定理 1.在已知最长无线和有线网络诱导延时 $d$ 和 $\tau$ 以及有线无线网络数据丢包率 $\delta $ , 对于给定的 $\gamma > 0$ , 如果存在正定对称矩阵 $P (\iota, r)$ 和 $P (l, s)$ , 使得如下矩阵不等式组成立:
$\begin{align}\left[{\begin{array}{*{20}{c}}{{\chi _{11}} + \delta \chi _{11}^ *-P(\iota, r)}&{{\chi _{12}}}\\ * &{{\chi _{22}}-I}\end{array}} \right] < 0\label{eq17}\end{align}$
(17) $\begin{align}\left[{\begin{array}{*{20}{c}}{-P(\iota, r)}&{{{\tilde C}^{\rm T}}(\iota, r)}\\ * &{-{\gamma ^2}I}\end{array}} \right] < 0\label{eq18}\end{align}$
(18) 式中
$ \begin{array}{l}{\chi _{11}} = \sum\limits_{l = 0}^\tau {\sum\limits_{{s_N} = 0}^d {{\lambda _{\iota l}}\pi _{{r_N}{s_N}}^{1 + \iota - l}} } \cdots \sum\limits_{l = 0}^\tau {\sum\limits_{{s_i} = 0}^d {{\lambda _{\iota l}}\pi _{{r_i}{s_i}}^{1 + \iota - l}} } \cdots \\ \quad \sum\limits_{l = 0}^\tau {\sum\limits_{{s_1} = 0}^d {{\lambda_{\iota l}}\pi _{{r_1}{s_1}}^{1 + \iota - l}} } \left( {{{\tilde A}^{\rm T}}(\iota, r)P(l, s)\tilde A(\iota, r)} \right)\end{array}\\ \begin{array}{l}\chi _{11}^ * = \sum\limits_{l = 0}^\tau {\sum\limits_{{s_N} = 0}^d {{\lambda _{\iota l}}\pi _{{r_N}{s_N}}^{1 + \iota - l}} } \cdots \sum\limits_{l = 0}^\tau {\sum\limits_{{s_i} = 0}^d {{\lambda _{\iota l}}\pi _{{r_i}{s_i}}^{1 + \iota - l}} } \cdots \\ \quad\sum\limits_{l = 0}^\tau {\sum\limits_{{s_1} = 0}^d {{\lambda_{\iota l}}\pi _{{r_1}{s_1}}^{1 + \iota - l}} } \left({{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} }^{\rm T}}(\iota, r)P(l, s)\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} (\iota, r)} \right)\end{array} \\ \begin{array}{l}{\chi _{12}} = \sum\limits_{l = 0}^\tau {\sum\limits_{{s_N} = 0}^d {{\lambda _{\iota l}}\pi _{{r_N}{s_N}}^{1 + \iota - l}} } \cdots \sum\limits_{l = 0}^\tau {\sum\limits_{{s_i} = 0}^d {{\lambda _{\iota l}}\pi _{{r_i}{s_i}}^{1 + \iota - l}} } \cdots \\ \quad\sum\limits_{l = 0}^\tau {\sum\limits_{{s_1} = 0}^d {{\lambda_{\iota l}}\pi _{{r_1}{s_1}}^{1 + \iota - l}} } \left( {{{\tilde A}^{\rm T}}(\iota, r)P(l, s)\tilde B(\iota, r)} \right)\end{array} \\ \begin{array}{l}{\chi _{22}} = \sum\limits_{l = 0}^\tau {\sum\limits_{{s_N} = 0}^d {{\lambda _{\iota l}}\pi _{{r_N}{s_N}}^{1 + \iota - l}} } \cdots \sum\limits_{l = 0}^\tau {\sum\limits_{{s_i} = 0}^d {{\lambda _{\iota l}}\pi _{{r_i}{s_i}}^{1 + \iota - l}} } \cdots \\ \quad \sum\limits_{l = 0}^\tau {\sum\limits_{{s_1} = 0}^d{{\lambda _{\iota l}}\pi _{{r_1}{s_1}}^{1 + \iota - l}} } \left({{{\tilde B}^{\rm T}}(\iota, r)P(l, s)\tilde B(\iota, r)} \right)\end{array} \\ P(\iota, r) = {\rm diag}_N^i\left\{ {{P^i}(\iota, r)} \right\}, i \in v \\ \delta = \beta (1 - \beta ) {\tilde \alpha } (I_1 -{\tilde\alpha } ), ~~ {I_1} = ve{c_{{N_i}}}\left\{ 1 \right\} $
则滤波误差动态系统 (14) 随机稳定且满足 ${H_2}/{H_\infty}$ 性能 $\gamma$ .
证明.选取Lyapunov函数为
$ V(\xi (k), k) = {\xi ^{\rm T}}(k)P(\iota, r)\xi (k) $
式中, $P (\iota, r)={\rm diag}_N^i\left\{ {{P^i}(\iota, r)}\right\}$ , $i \in v$ .
1) 令 $\omega (k)=0$ , 分析滤波误差动态系统的稳定性.
$ \begin{array}{l}\Delta V(k) = {\rm E}(V(\xi (k + 1), k + 1)) - V(\xi (k), k)=\\ \quad \sum\limits_{l = 0}^\tau {\sum\limits_{{s_N} = 0}^d {{\lambda _{\iota l}}\pi _{{r_N}{s_N}}^{1 + \iota - l}} } \cdots \sum\limits_{l = 0}^\tau {\sum\limits_{{s_i} = 0}^d {{\lambda _{\iota l}}\pi _{{r_i}{s_i}}^{1 + \iota - l}} } \cdots \\\quad \sum\limits_{l = 0}^\tau {\sum\limits_{{s_1} = 0}^d {{\lambda _{\iota l}}\pi _{{r_1}{s_1}}^{1 + \iota - l}} } \left[{{\xi ^{\rm T}}(k){{\tilde A}^{\rm T}}(\iota, r)P(l, s)\tilde A(\iota, r)\xi (k) + } \right.\\\quad \left. {{\xi ^{\rm T}}(k) \beta (1-\beta ) {\tilde \alpha} (I_1-{\tilde \alpha }){{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} }^{\rm T}}(\iota, r)P(l, s)\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} (\iota, r)\xi (k)} \right]-\\\quad {\xi ^{\rm T}}(k)P(\iota, r)\xi (k)=\\\quad {\xi ^{\rm T}}(k)\Theta (\iota, r)\xi (k)\end{array} $
式中
$ \begin{array}{l}\Theta (\iota, r) = \sum\limits_{l = 0}^\tau {\sum\limits_{{s_N} = 0}^d {{\lambda _{\iota l}}\pi _{{r_N}{s_N}}^{1 + \iota - l}} } \cdots \sum\limits_{l = 0}^\tau {\sum\limits_{{s_i} = 0}^d {{\lambda _{\iota l}}\pi _{{r_i}{s_i}}^{1 + \iota - l}} } \cdots \\\sum\limits_{l = 0}^\tau {\sum\limits_{{s_1} = 0}^d {{\lambda _{\iota l}}\pi _{{r_1}{s_1}}^{1 + \iota - l}} } \left( {{{\tilde A}^{\rm T}}(\iota, r)P(l, s)\tilde A(\iota, r)} \right. + \\\left. { \beta (1 - \beta ) {\tilde \alpha } (I_1 -{\tilde\alpha }){{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} }^{\rm T}}(\iota, r)P(l, s)\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} (\iota, r)} \right)- P(\iota, r)\end{array} $
令 $\Theta (\iota, r) < 0$ , 可得:
$ \begin{array}{l}{\rm E}V(\xi (k + 1), k + 1) - V(\xi (k), k)=\\\quad \xi {(k)^{\rm T}}\Theta (\iota, r)\xi (k)\le\\\quad - \bar \beta \xi {(k)^{\rm T}}\xi (k)\le\\\quad - \bar \beta x{(k)^{\rm T}}x(k)\end{array} $
式中, ${\rm{ }}\bar \beta=\inf \left\{ {{\lambda _{\min }}(-\Theta (\iota, r))} \right\}$ .
将上面不等式两边从0到 $\ell~(\ell \to \infty)$ 进行叠加, 则
$ \begin{array}{l}\mathop {\lim }\limits_{\ell \to \infty } {\rm E}\left( {V(\xi(\ell + 1), \ell + 1)} \right) - V({\varphi_0}, {s_0})\le\\\quad - \bar \beta \mathop {\lim }\limits_{\ell \to \infty } \sum\limits_{k = 0}^\ell {{\rm E}\left( {x{{(k)}^{\rm T}}x(k)} \right)} {\rm{ }}\Rightarrow\\\quad \bar \beta \mathop {\lim }\limits_{\ell \to \infty } \sum\limits_{k = 0}^\ell {{\rm E}\left( {x{{(k)}^{\rm T}}x(k)} \right)} \le\\\quad \dfrac{1}{\bar \beta }V({\varphi _0}, {s_0}) - \dfrac{1}{\bar \beta }\mathop {\lim }\limits_{\ell \to \infty } {\rm E}\left( {V(\xi (\ell + 1), \ell + 1)} \right)\le\\\quad \dfrac{1}{\bar \beta }V({\varphi _0}, {s_0}) < \infty\end{array} $
故滤波误差动态系统 (14) 随机稳定.
2) 令 $\omega (k) \ne 0$ , 初始条件为零, 分析滤波误差动态系统的 ${H_2}/{H_\infty }$ 性能.
$ \begin{array}{l}\Delta V(k) = {\rm E}(V(\xi (k + 1), k + 1)) - V(\xi (k), k)=\\ {\rm E}({\xi ^{\rm T}}(k \!+\! 1)P(l, s)\xi (k \!+\! 1)) \!-\! {\xi ^{\rm T}}(k)P(\iota, r)\xi (k)\!=\\ {\left[{\begin{array}{*{20}{c}}{\xi (k)}\\{\omega (k)}\end{array}} \right]^{\rm T}}{\psi _1}\left[{\begin{array}{*{20}{c}}{\xi (k)}\\{\omega (k)}\end{array}} \right]\end{array} $
式中
$ {\psi _1} = \left[{\begin{array}{*{20}{c}}{{\chi _{11}} + \delta \chi _{11}^ *-P(\iota, r)}&{{\chi _{12}}}\\ * &{{\chi _{22}}}\end{array}} \right] $
定义 $J={\rm E}(V (\xi (k), k) -{\rm E}(\sum_{h=0}^{k -1}{{\omega ^{\rm T}}(h)\omega (h)})$ , 当初始条件为0时, ${\rm E}(V (0), 0)=0$ , 则:
$ \begin{array}{l}J = {\rm E}(V(\xi (k), k)) - {\rm E}(V(0), 0) - \\\quad {\rm E}\left(\sum\limits_{h = 0}^{k - 1} {{\omega ^{\rm T}}(h)\omega (h)} \right)= \sum\limits_{h = 0}^{k - 1} {(\Delta V(\xi (h), h) - }\\\quad {\omega ^{\rm T}}(h)\omega (h)) =\sum\limits_{h = 0}^{k - 1}{{{\left[\begin{array}{l}\xi (k)\\\omega (k)\end{array} \right]}^{\rm T}}} {\psi _2}\left[\begin{array}{l}\xi (k)\\\omega (k)\end{array} \right]\end{array} $
式中
$ {\psi _2} = \left[{\begin{array}{*{20}{c}}{{\chi _{11}} + \delta \chi _{11}^ *-P(\iota, r)}&{{\chi _{12}}}\\ * &{{\chi _{22}}-I}\end{array}} \right] $
假设 ${\psi _2} < 0$ , 则 $J < 0$ , 即:
$ {\rm E}({\xi ^{\rm T}}(k)P(\iota, r)\xi (k)) < {\rm E}\left(\sum\limits_{h = 0}^{k - 1}{{\omega ^{\rm T}}(h)\omega (h)} \right) $
由Schur补可知, 式 (18) 等价于 ${\tilde C^{\rm T}}(\iota, r)\tilde C (\iota, r) < {\gamma ^2}P (\iota, r)$ , 则
$ \begin{array}{l}{\rm E}({\xi ^T}(k){{\tilde C}^{\rm T}}(\iota, r)\tilde C(\iota, r)\xi (k))<\\ \quad {\gamma ^2}{\rm E}({\xi ^{\rm T}}(k)P(\iota, r)\xi (k))<\\ \quad {\gamma ^2}{\rm E}(\sum\limits_{h = 0}^{k - 1} {{\omega ^{\rm T}}(h)\omega (h)} )\Rightarrow\\\quad {\rm E}({e^{\rm T}}(k)e(k)) < {\gamma ^2}{\rm E}(\sum\limits_{h = 0}^{k - 1} {{\omega ^{\rm T}}(h)\omega (h)} )\Rightarrow \\\quad \mathop {\sup }\limits_k {\rm E}({e^{\rm T}}(k)e(k)) < {\gamma^2}{\rm E}(\sum\limits_{h = 0}^{k - 1} {{\omega ^{\rm T}}(h)\omega(h)} )\end{array} $
故滤波误差动态系统 (14) 随机稳定, 且满足 ${H_2}/{H_\infty }$ 性能 $\gamma$ .
注7.定理1给出了滤波误差动态系统随机稳定且满足 ${H_2}/{H_\infty}$ 性能指标的充分条件, 并建立了系统随机稳定性、分布式滤波器参数和最长有线无线异构网络诱导延时和有线无线网络数据丢包之间的关系.
3. 滤波器设计
引理1[47].对于矩阵 $U$ , 对称矩阵 $U_1$ 、 $U_2$ , 且 ${U_1}> 0$ , 若不等式 ${U^{\rm T}}{U_1}U -{U_2} < 0$ , 则存在矩阵 $Y$ , 使得矩阵不等式:
$\begin{align}\left[{\begin{array}{*{20}{c}}{-{U_2}}&{{U^{\rm T}}Y}\\{{Y^{\rm T}}U}&{{U_1}-Y-{Y^{\rm T}}}\end{array}} \right] < 0\label{eq19}\end{align}$
(19) 成立.
定理2.在已知最长无线和有线网络诱导延时 $d$ 和 $\tau$ 以及有线无线异构网络数据丢包率 $\delta$ , 对于给定的 $\gamma > 0$ , 如果存在正定对称矩阵 $P (\iota, r)$ , 矩阵 ${\bar y_{1m'}}, ~~{\bar y_{2i'}}, ~~{\bar y_{3m'}}, ~~m'=1, 2, 3, ~~i'=1, 2, \tilde C (\iota, r)$ , ${O_i}\left ({\iota, r}\right)$ , ${H_i}\left ({\iota, r} \right)$ , $i \in \upsilon $ , 使如下矩阵不等式组成立:
$\begin{align}\left[{\begin{array}{*{20}{c}}{-P(\iota, r)}&0&{{\Xi _1}\Gamma }&{\partial {\Xi _2}\Gamma }\\ * &{-I}&{{\Xi _3}\Gamma }&0\\ *&* &{{\Xi _4}}&0\\ *&*&* &{{\Xi _4}}\end{array}} \right] < 0\label{eq20}\end{align}$
(20) $\begin{align}\left[{\begin{array}{*{20}{c}}{-P(\iota, r)}&{{{\tilde C}^{\rm T}}(\iota, r)}\\ * &{-{\gamma ^2}I}\end{array}} \right] < 0\label{eq21}\end{align}$
(21) 式中, $\partial=\sqrt \delta $ , $P (\iota, r)={\rm dia g}_N^i\left\{ {{P^i}(\iota, r)} \right\}$ , 且 ${P^i}(\iota, r)=\left[{{array}{*{20}{c}}{P_{11}^i}&{P_{12}^i}&{P_{13}^i}\\{P_{21}^i}&{P_{22}^i}&{P_{23}^i}\\{P_{31}^i}&{P_{32}^i}&{P_{33}^i}{array}} \right]$ ( ${P_{m'n'}}$ 是块矩阵,
$ n' = 1, 2, 3, i \in v) \\ Y = {\rm diag}\left\{ {\overline Y, \overline Y, \cdots, \overline Y } \right\} \\ \overline Y = \left[{\begin{array}{*{20}{c}}{{{\bar y}_{11}}}&{{{\bar y}_{12}}}&{{{\bar y}_{13}}}\\{{{\bar y}_{22}}}&{{{\bar y}_{22}}}&0\\{{{\bar y}_{31}}}&{{{\bar y}_{32}}}&{{{\bar y}_{33}}}\end{array}} \right], {\Xi _1} = {\rm diag}_N^i\left\{ {\Xi _1^i} \right\} $
且
$ \Xi _1^i = \left[{\begin{array}{*{20}{c}}{\phi _{11}^i}&{\phi _{12}^i}&{\phi _{13}^i}\\{\phi _{22}^i}&{\phi _{22}^i}&0\\{\phi _{31}^i}&{\phi _{32}^i}&{\phi _{33}^i}\end{array}} \right] $
其中, $\phi _{1i'}^i={A^{\rm{T}}}{{\bar y}_{1i'}} + \beta \alpha\sum_{j \in {N_i}} {w_{ij}}C_j^{\rm{T}}{({I_{all}} -{I_{ch}})}^{\rm{T}}\times$ $H_i^{\rm{T}}(\iota, r) +A_1^{\rm{T}}{\bar y}_{3i'}$ $\phi _{13}^i={A^{\rm{T}}}{{\bar y}_{13}} + A_1^{\rm{T}}{{\bar y}_{33}}$ , $\phi _{22}^i=O_i^{\rm T}(\iota, r)$ , $\phi _{3i'}^i=\beta \alpha \sum\limits_{j \in{N_i}} {{w_{ij}}\bar C_j^{\rm T}I_{ch}^{\rm T}H_i^{\rm T}(\iota, r)}+ A_2^{\rm T}{\bar y_{3i'}}$ , $\phi _{33}^i=A_2^{\rm T}{\bar y_{33}}$ .
$ {\Xi _2} = {\rm diag}_N^i\left\{ {\Xi _2^i} \right\}, \ \mbox{且}\ \Xi_2^i = \left[{\begin{array}{*{20}{c}}{\vartheta _{11}^i}&{\vartheta _{11}^i}&0\\0&0&0\\{\vartheta _{31}^i}&{\vartheta _{31}^i}&0\end{array}} \right] $
其中, $\vartheta _{11}^i=-\sum_{j \in {N_i}} {C_j^{\rm T}{{\left ({{I_{all}} -{I_{ch}}} \right)}^{\rm T}}H_i^{\rm T}(\iota, r)} $ , $\vartheta _{31}^i=-\sum_{j \in {N_i}} {\bar C_j^{\rm T}{I_{ch}}^{\rm T}H_i^{\rm T}(\iota, r)} $ . ${\Xi _3}={\rm dia g}_N^i\left\{ {\Xi _3^i} \right\}$ , 且 $\Xi _3^i=\left[{{array}{*{20}{c}} {\theta _{11}^i}&{\theta _{12}^i}&{\theta_{13}^i}{array}} \right]$ , 其中, $\theta _{1i'}^i={B^{\rm T}}{\bar y_{1i'}} + D_i^{\rm T}H_i^{\rm T}(\iota, r){\rm{ }}, $ $\theta _{13}^i={B^{\rm T}}{\bar y_{13}}, i'=1, 2.$ ${\Xi _4}={\rm diag}\left\{ {\Xi _4^i} \right\}$ , 且 $\Xi _4^i={\Delta ^i} -Y -{Y^{\rm T}}$ , $\Gamma=\left[{\overline I, \overline I, \cdots, \overline I } \right]{\rm{ }}, $ $\overline I={\rm dia g}\left\{ {I, I, I} \right\}{\rm{, }}$ ${\Delta ^i}={\rm diag}\{\wp _1^i (0, 0, \cdots, 0)$ , $\wp _2^i (0, 0, \cdots, 1), \cdots, \wp _f^i (\tau, d$ , $d, \cdots, d) \}$ , 且 ${\Delta ^i}$ 维数为 $(\tau + 1) \times {(d + 1)^N}$ , 其中, $\wp_1^i (0, 0, \cdots, 0)=(\lambda _{\iota 0}\pi _{{r_N}0}^{1 + \iota-0} \times \cdots \times {\lambda _{\iota 0}}\pi _{{r_i}0}^{1+ \iota -0} \times \cdots \times {\lambda _{\iota 0}}\pi_{{r_1}0}^{1 + \iota -0}){P^i} {(0, 0, \cdots, 0)}, $ $\wp_2^i (0, 0, \cdots, 1)=({\lambda _{\iota 0}}\pi _{{r_N}1}^{1 +\iota -0} \times \cdots \times {\lambda _{\iota 0}}\pi_{{r_i}1}^{1 + \iota -0} \times \cdots \times {\lambda _{\iota0}}\pi _{{r_1}1}^{1 + \iota -0}){P^i}(0, 0, \cdots, 1), $ $\wp_f^i (\tau, {d, d, \cdots, d})=({\lambda _{\iota \tau }}\pi_{{r_N}d}^{1 + \iota -\tau} \times \cdots \times {\lambda _{\iota\tau }}\pi _{{r_i}d}^{1 + \iota -\tau} \times \cdots \times{\lambda _{\iota \tau }}\pi _{{r_1}d}^{1 + \iota -\tau}){P^i}(\tau, d, d, \cdots, d)$ .则滤波误差动态系统 (14) 随机稳定且满足 ${H_2}/{H_\infty }$ 性能 $\gamma$ , 并且分布式滤波器如第 $i (i \in v)$ 个滤波器的参数为
$ {A_i}(\iota, r) = {\left( {\bar y_{22}^{\rm T}} \right)^{ - 1}}{O_i}(\iota, r)\\ {B_i}(\iota, r) = {\left( {\bar y_{22}^{\rm T}} \right)^{ - 1}}{H_i}(\iota, r) $
证明.定理1中不等式 (17) 进一步写为
$ \begin{align} &\left[\begin{matrix} {{\chi }_{11}}+\delta \chi _{11}^{*}-P(\iota, r)&{{\chi }_{12}} \\ *&{{\chi }_{22}}-I \\ \end{matrix} \right]<0\Rightarrow \\ &\left[\begin{matrix} -P(\iota, r)&0 \\ * &-I \\ \end{matrix} \right]+\left[\begin{matrix} {{\chi }_{11}}+\delta \chi _{11}^{*}&{{\chi }_{12}} \\ *&{{\chi }_{22}} \\ \end{matrix} \right]< \\ \end{align} $
$ \begin{array}{l} \quad 0\Rightarrow \left[{\begin{array}{*{20}{c}}{-P(\iota, r)}&0\\*&{-I}\end{array}} \right] + \\\quad \left[{\begin{array}{*{20}{c}}{{{\tilde A}^{\rm{T}}}(\iota, r)}\\{{{\tilde B}^{\rm{T}}}(\iota, r)}\end{array}} \right]T\Delta {T^{\rm{T}}}{\left[{\begin{array}{*{20}{c}}{{{\tilde A}^{\rm{T}}}(\iota, r)}\\{{{\tilde B}^{\rm{T}}}(\iota, r)}\end{array}} \right]^{\rm{T}}} + \\\quad\delta \left[{\begin{array}{*{20}{c}}{{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} }^{\rm{T}}}(\iota, r)}\\0 \end{array}} \right]T\Delta {T^{\rm{T}}}{\left[{\begin{array}{*{20}{c}}{{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} }^{\rm{T}}}(\iota, r)}\\0 \end{array}} \right]^{\rm T}} < 0\end{array} $
式中, $T=\left[{{array}{*{20}{c}} I&I& \cdots &I{array}} \right]$ .
运用引理1, 上式化简为[35]
$ \begin{array}{l}\left[{\begin{array}{*{20}{c}} {-P(\iota, r)}&0&{{{\tilde A}^{\rm{T}}}(\iota, r)TY}&{\partial{{\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} }^{\rm{T}}}(\iota, r)TY}\\*&{-I}&{{{\tilde B}^{\rm{T}}}(\iota, r)TY}&0\\*&*&{\Delta-Y - {Y^{\rm{T}}}}&0\\*&*&*&{\Delta - Y - {Y^{\rm{T}}}}\end{array}} \right]< 0\end{array} $
将 ${\tilde A^{\rm T}}(\iota, r)$、${\mathord{\buildrel{\lower3pt\hbox{$\scriptscriptstyle\smile$}}\over A} ^{\rm T}}(\iota, r)$ 和 ${\tilde B^{\rm T}}(\iota, r)$ 代入上式可得不等式 (20).
注8.通过LMI工具箱求解定理2的可行解可得 $C_i (\iota, r)$ , ${O_i}\left ({\iota, r} \right)$ , ${H_i}\left ({\iota, r}\right)$ , 进一步通过求解 ${A_i}(\iota, r)={\left ({\bar y_{22}^{\rm T}} \right)^{ -1}}{O_i}(\iota, r), {B_i}(\iota, r)={\left ({\bar y_{22}^{\rm T}} \right)^{ -1}}{H_i}(\iota, r)$ 可得滤波器参数 $A_i (\iota, r)$ , $B_i (\iota, r)$ , 故可得到每个滤波器的参数 ${A_i}(\iota, r)$ 、 ${B_i}(\iota, r)$ 和 $C_i (\iota, r)$ , $i \in \upsilon $ .
注9.在定理2中, 通过求解线性矩阵不等式组 (20) 和 (21) 的可行解, 能够得到模型依赖全阶 ${H_2}/{H_\infty }$ 滤波器参数.然而, 在定理2中, ${H_2}/{H_\infty }$ 性能指标 $\gamma $ 是给定的, 所以所设计的 ${H_2}/{H_\infty }$ 滤波器是次优滤波器.如果 ${H_2}/{H_\infty }$ 性能指标 $\gamma $ 未知, 如下不等式组成立:
$\begin{align}\left\{ \begin{array}{l}\min \rho\\{\rm s.t.}~~ (20), (21)\end{array} \right.\end{align}$
(22) 式中, $\rho={\gamma ^2}$ , 则所设计的 ${H_2}/{H_\infty}$ 滤波器是最优滤波器, 相应的最优滤波器参数的求解公式与定理2相同.
4. 仿真例子
为了验证所提方法的有效性和可行性, 本文考虑一个由两个无线传感器节点和两个局部融合中心组成的分布式 ${H_2}/{H_\infty }$ 滤波系统, 如图 1所示, 其中, 无线网络中传感器到局部融合中心的通信拓扑如图 5所示, 系统 (2)、(3) 和 (10) 的参数如下: $A=\left[{{array}{*{20}{c}}{-0.2}&{0.9}\\{-0.4}&{-0.8}{array}} \right], $ ${C_1}=\left[{{array}{*{20}{c}}{0.9}&{0.2}\\{0.2}&{0.6}{array}} \right]$ , ${C_2}=\left[{{array}{*{20}{c}}{0.5}&{0.8}\\{0.6}&{0.7}{array}} \right], $ $ B=\left[{{array}{*{20}{c}}{0.5}&{-0.6}{array}} \right]^{\rm T}$ , $L=\left[{{array}{*{20}{c}}{0.5}&{0.5}{array}} \right], $ ${D_1}=\left[{{array}{*{20}{c}}{0.5}&{0.3}{array}} \right]^{\rm T}$ , ${D_2}=\left[{{array}{*{20}{c}}{0.2}&{0.4}{array}} \right]^{\rm T}$ , 其中, 顶点集 $\upsilon=\left\{ {1, 2} \right\}$ , 边集 $E=\left\{ {\left ({1, 1} \right), \left ({1, 2} \right), \left ({2, 1} \right), \left ({2, 2} \right)} \right\}$ , 邻接加权矩阵 $W=\left[{{array}{*{20}{c}}1&1\\1&1{array}} \right]$ .
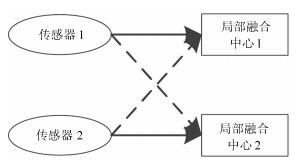 图 5 传感器与局部融合中心通信拓扑示意图 (N=2)Fig. 5 The communication topology from sensors to localfusion centers (N=2)
图 5 传感器与局部融合中心通信拓扑示意图 (N=2)Fig. 5 The communication topology from sensors to localfusion centers (N=2)设有线无线异构网络中无线和有线网络数据丢包率分别为 $ \alpha=0.2$ , $\beta=0.3$ , 最长网络诱导延时分别为 $d=\tau=1$ , 相应的马尔科夫概率转移矩阵分别为
$ \Pi = \left[{\begin{array}{*{20}{c}}{0.4}&{0.6}\\{0.5}&{0.5}\end{array}} \right], \quad \Lambda = \left[{\begin{array}{*{20}{c}}{0.3}&{0.7}\\{0.6}&{0.4}\end{array}} \right] $
在无线网络中, 由于每个传输通道在同一时刻受到的网络诱导延时不尽相同, 而在有线网络中相同, 若无线和有线网络的最长网络诱导延时均为1, 根据注5, 则有8种跳变状态, 即: $\Im=\left\{ {{h_i}|{h_i}=\left[{{array}{*{20}{c}}{{g_{11}}}&{{g_{22}}}\\{{g_{21}}}&{{g_{22}}}{array}} \right], i=1, 2, \cdots, 8} \right\}$ , 其中, ${g_{j1}}~(j=1, 2)$ 表示两个传感器节点在无线网络通道传输时所受的网络诱导延时, ${g_{22}}$ 表示信号在有线网络通道传输时所受的网络诱导延时.对于给定的 ${H_2}/{H_\infty }$ 性能 $\gamma=1$ , 根据定理2, 可得到8个不同模态下对应的 ${H_2}/{H_\infty }$ 滤波器, 具体如下 (由于篇幅所限, 在此仅列举1种模态下滤波器参数):
第1个滤波器的参数:
$ \begin{align*}\begin{array}{l} {A_{1{h_1}}} = \left[{\begin{array}{*{20}{c}}{-0.0438}&{0.0258}\\{0.0166}&{-0.0116}\end{array}} \right]\end{array}\end{align*} $
$ {{B}_{1{{h}_{1}}}}=\text{ }\left[\begin{matrix} 0.4922 &-0.4926 \\ -0.4190&0.4192 \\ \end{matrix} \right] $
$ {{C}_{1{{h}_{1}}}}\text{=}\left[\begin{matrix} -0.0252&0.0037 \\ \end{matrix} \right] $
第2个滤波器的参数:
$ \begin{align*}\begin{array}{l} {A_{2{h_1}}} = \left[{\begin{array}{*{20}{c}}{-0.0437}&{0.0254}\\{0.0165}&{-0.0115}\end{array}} \right]\\[4mm]{B_{2{h_1}}} = \left[{\begin{array}{*{20}{c}}{-0.6570}&{0.6565}\\{0.5593}&{0.5590}\end{array}} \right]\\[4mm]{C_{2{h_1}}} = \left[{\begin{array}{*{20}{c}} {-0.0251}&{0.0036}\end{array}} \right]\end{array}\end{align*} $
当 $\gamma $ 未知时, 根据注9, 通过求解 (22) 可得到最优扰动衰减性能指标, 并在不同的有线无线异构网络数据丢包的条件下进行对比如表 1所示.从表 1中可以看出, 虽然 ${H_2}/{H_\infty}$ 最优扰动衰减性能指标随着有线无线异构网络数据丢包率的波动变化, 但仍具有较强的抗扰动性能.
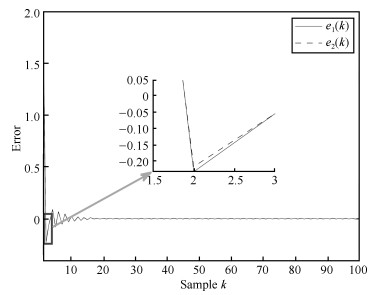
表 1 最优扰动衰减性能指标对比Table 1 Comparison of the minimum noise attenuation level有线无线异构网络数据丢包率 (α, β) 最优扰动衰减性能指标 (γ*) α=0.2, β=0.3 4.5911E-005 α=0.6, β=0.3 4.3237E-005 α=0.2, β=0.7 4.6150E-005 α=0.6, β=0.7 4.3381E-005 进一步分析有线无线异构网络通信约束对系统稳定性的影响, 假设初始条件 $x (0)={\left[{{array}{*{20}{c}} 4&{-0.2}{array}} \right]^{\rm T}}$ , 无线和有线网络数据丢包率分别为 $ \alpha=0.2, \beta=0.3$ .由无线和有线网络的最长网络诱导延时均为1, 则其对应8种模态且分别用 $h_1$ 到 $h_8$ 表示, 图 6展示了一种情况下的网络状态, 其中每个时刻对应不同的模态, 且每种模态的比例分别为: $h_1: 17 \%$ , $h_2: 10 \%$ , $h_3: 8 \%$ , $h_4: 16 \%$ , $h_5:15 \%$ , $h_6: 11 \%$ , $h_7: 9 \%$ , $h_8: 14 \%$ .图 7给出了被调输出和两个滤波器的估计输出, 图 8给出了在图 6网络状态下两个不同滤波器的滤波误差, 从图 8中可以看出误差均趋于零, 验证了本文所提方法是可行且有效的.
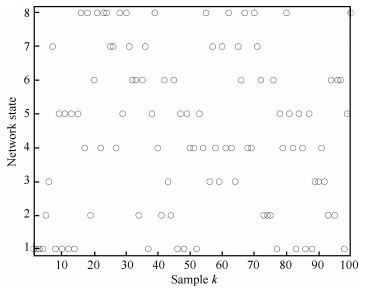 图 6 网络状态图 (值1到8分别代表模态1到模态8)Fig. 6 Networked state (Numerical values 1 to 8 represent Mode1 to 8.)
图 6 网络状态图 (值1到8分别代表模态1到模态8)Fig. 6 Networked state (Numerical values 1 to 8 represent Mode1 to 8.)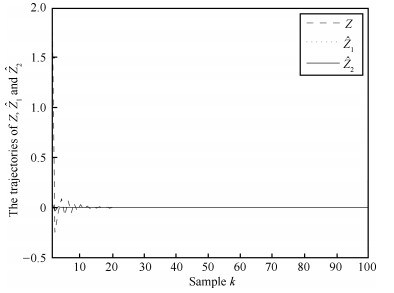 图 7 被调输出和两个不同滤波器的估计输出Fig. 7 The controlled output and estimated outputs of twodifferent filters
图 7 被调输出和两个不同滤波器的估计输出Fig. 7 The controlled output and estimated outputs of twodifferent filters为了进一步分析在不同网络状态下两个不同滤波器的性能, 假设在零初始条件下, 干扰输入为
$ \omega (k) = \left\{ \begin{array}{ll}0.02,& 21 \le k \le 70\\0, &1 \le k \le 20, ~~71 \le k \le 100\end{array} \right. $
表 2给出了在三种不同网络状态下两个不同滤波器的性能指标, 从中可以看出不同滤波器在不同的网络状态下的 ${H_2}/{H_\infty}$ 的性能指标 $\gamma $ 均小于给定值1, 这进一步证明了本文所提方法的可行性和有效性.
表 2 不同模态下两个滤波器的 ${H_2}/{H_\infty }$ 性能指标Table 2 The ${H_2}/{H_\infty }$ noise attenuation level underdifferent models in two filtersh1(%) h2(%) h3(%) h4(%) h5(%) h6(%) h7(%) h8(%) 滤波器1的H2/H∞性能指标 (γ) 滤波器2的H2/H∞性能指标 (γ) 18 8 10 10 18 7 11 18 5.9365E-07 5.9372E-07 17 10 8 16 15 11 9 14 5.7665E-07 5.7662E-07 17 10 8 12 13 14 11 15 5.2931E-07 5.2702E-07 5. 结论
本文研究了受有线无线异构网络诱导延时和数据丢包约束的分布式 ${H_2}/{H_\infty}$ 滤波, 解决了一类分布式有线无线异构网络的 ${H_2}/{H_\infty}$ 滤波问题.首先, 运用Markov链和伯努利分布分别描述分布式有线无线异构网络诱导延时和数据丢包特性; 然后, 建立了融合分布式滤波器参数、有线无线异构网络通信约束的滤波误差动态系统综合模型, 理论证明了滤波误差动态系统随机稳定且满足 ${H_2}/{H_\infty }$ 性能指标.与目前单网络环境下的分布式 ${H_2}/{H_\infty}$ [32-33]滤波方法相比, 本文提出的分布式有线无线异构网络 ${H_2}/{H_\infty}$ 滤波方法更具有普适性.然而, 本文主要基于数例仿真进行了方法验证可为实际应用提供一定技术支撑, 但进一步将其应用于实际工业过程是今后的一项重要工作.此外, 由于分布式无线传感器的能量和网络带宽有限, 如何研究具有高效通信效率的分布式 ${H_2}/{H_\infty}$ 滤波也是今后一个非常值得研究的方向.
-
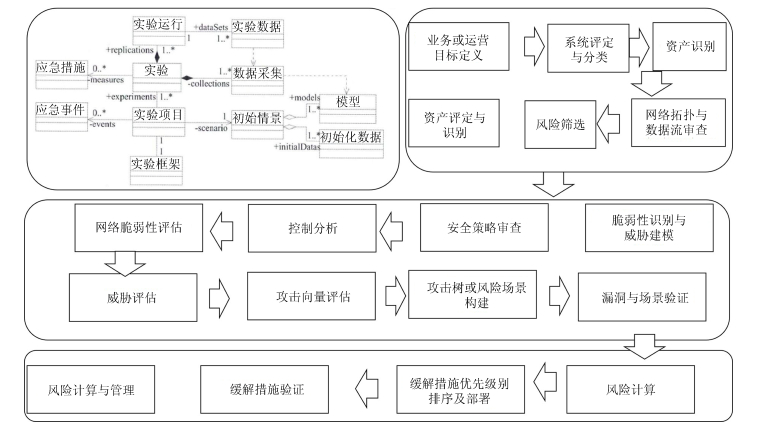
图 8 核电工控系统信息安全保障方案平台评估流程
Fig. 8 Nuclear power information security program platform for industrial control systems assessment process
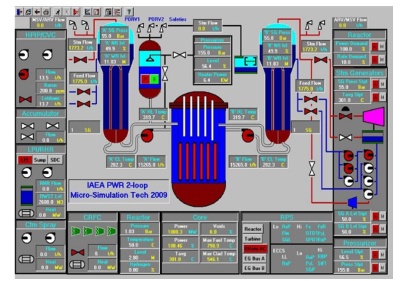
图 9 核电工控系统信息安全计算实验图例
Fig. 9 Nuclear power control system of information security computing experiments instance

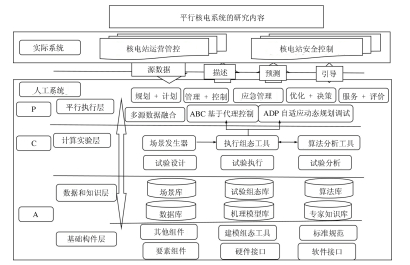
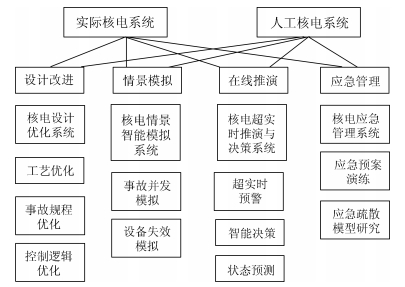
图 10 基于平行理论的核电仪控技术研究架构
Fig. 10 Parallel instrumentation and control system structure of nuclear power
-
[1] 张廷克, 李闽榕, 潘启龙.中国核能发展报告(2018).北京:社会科学文献出版社, 2018. [2] 卡尔·波普尔.客观知识:一个进化论的研究.上海:上海译文出版社, 1972.Popper K R. Objective Knowledge:An Evolutionary Approach. Shanghai:Shanghai Translation Publishing House, 1972. [3] Jaspers K. The Origin and Goal of History. Munich:Piper Verlag GmbH, 1949. [4] 库尔特·哥德尔. 〈数学原理〉及有关系统中的形式不可判定命题. 1931.Gödel K. On Formally Undecidable Propositions of Principia Mathematica and Related Systems(Ⅰ). 1931. [5] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtmlWang Fei-Yue. Software-defined systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtml [6] Wang F Y. The emergence of intelligent enterprises:from CPS to CPSS. IEEE Intelligent Systems, 2010, 25(4):85-88 doi: 10.1109/MIS.2010.104 [7] 王飞跃, 杨坚, 韩双双, 杨柳青, 程翔.基于平行系统理论的平行网络架构.指挥与控制学报, 2016, 2(1):71-77 https://www.researchgate.net/profile/Fei_Yue_Wang/publication/317328968_The_Framework_of_Parallel_Network_Based_on_the_Parallel_System_Theory/links/5932737845851553b6aabedf/The-Framework-of-Parallel-Network-Based-on-the-Parallel-System-Theory.pdfWang Fei-Yue, Yang Jian, Han Shuang-Shuang, Yang Liu-Qing, Cheng Xiang. The framework of parallel network based on the parallel system theory. Journal of Command and Control, 2016, 2(1):71-77 https://www.researchgate.net/profile/Fei_Yue_Wang/publication/317328968_The_Framework_of_Parallel_Network_Based_on_the_Parallel_System_Theory/links/5932737845851553b6aabedf/The-Framework-of-Parallel-Network-Based-on-the-Parallel-System-Theory.pdf [8] 王飞跃. X5. 0: 平行时代的平行智能体系. 新时代智能论坛, 2015. https://www.researchgate.net/publication/317328952_X50pingxingshidaidepingxingzhinengtixiWANG Fei-Yue. X5. 0: Parallel Intelligence System in Parallel ERA. The New Intelligence Age Forum. 2015. https://www.researchgate.net/publication/317328952_X50pingxingshidaidepingxingzhinengtixi [9] 王飞跃.平行系统方法与复杂系统的管理和控制.控制与决策, 2004, 19(5):485-489 http://mall.cnki.net/magazine/Article/KZYC200405001.htmWang Fei-Yue. Parallel system methods for management and control of complex systems. Control and Decision, 2004, 19(5):485-489 http://mall.cnki.net/magazine/Article/KZYC200405001.htm [10] 王飞跃.平行控制:数据驱动的计算控制方法.自动化学报, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtmlWang Fei-Yue. Parallel control:a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtml [11] 宁滨, 王飞跃, 董海荣, 文丁.高速铁路平行控制与管理系统研究框架.复杂系统与复杂性科学, 2010, 7(4):11-21 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fzxtyfzxkx201004002Ning Bin, Wang Fei-yue, Dong Hai-rong, Wen Ding. Framework of parallel control and management for high-speed railway systems. Complex Systems And Complexity Science, 2010, 7(4):11-21 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fzxtyfzxkx201004002 [12] Glaessgen E H, Stargel D S. The digital twin paradigm for future NASA and U. S. air force vehicles. In: Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference. Honolulu, Hawaii, USA: AIAA, 2012. doi: 10.2514/6.2012-1818 [13] Weber A. GE 'predix' the future of manufacturing. Assembly, 2017, 60(3):GE70-GE76 https://www.ptc.com/en/news/2016/ptc-and-ge-digital-to-expand-strategic-alliance [14] 熊刚, 董西松, 王兆魁, 王飞跃. 平行控制与管理的研究及应用进展综述. 中国空天安全会议, 2017 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZHKT201708001090.htmXiong Gang, Dong Xi-Song, Wang Zhao-Kui, Wang Fei-Yue. Research and Application Review of Parallel Control and Management. Chinese Aerospace Safety Symposium, 2017 http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZHKT201708001090.htm [15] 王飞跃. 复杂系统的控制与管理机制研究及其应用. 见: 中国科学院院长基金特别支持项目立项书. 北京, 2005.Wang Fei-Yue. New mechanisms for control and management of complex systems: research and development. In: Project to the Presidents Foundation for Special Projects, Chinese Academy of Sciences. Beijing, China, 2005. [16] Wang F Y, Wang X, Li L X, Li L. Steps toward parallel intelligence. IEEE/CAA Journal of Automatica Sinica, 2016, 3(4):345-348 doi: 10.1109/JAS.2016.7510067 [17] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃.平行学习——机器学习的一个新型理论框架.自动化学报, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtmlLi Li, Lin Yi-Lun, Cao Dong-Pu, Zheng Nan-Ning, Wang Fei-Yue. Parallel learning:a new framework for machine learning. Acta Automatica Sinica, 2017, 43(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18984.shtml [18] Wang F Y, Zhang J, Wei Q L, Zheng X H, Li L. PDP:parallel dynamic programming. IEEE/CAA Journal of Automatica Sinica, 2017, 4(1):1-5 doi: 10.1109/JAS.2017.7510310 [19] 王飞跃, 王晓, 袁勇, 王涛, 林懿伦.社会计算与计算社会:智慧社会的基础与必然.科学通报, 2015, 60(5-6):460-469 http://mall.cnki.net/magazine/Article/KXTB2015Z1008.htmWang Fei-Yue, Wang Xiao, Yuan Yong, Wang Tao, Lin Yi-Lun. Social computing and computational societies:the foundation and consequence of smart societies. Chinese Science Bulletin, 2015, 60(5-6):460-469 http://mall.cnki.net/magazine/Article/KXTB2015Z1008.htm [20] Wang F Y, Wong P K. Intelligent systems and technology for integrative and predictive medicine:an ACP approach. ACM Transactions on Intelligent Systems and Technology, 2013, 4(2):Article No.32 http://europepmc.org/abstract/med/24883228 [21] Wang F Y. Toward a paradigm shift in social computing:the ACP approach. IEEE Intelligent Systems, 2007, 22(5):65-67 doi: 10.1109/MIS.2007.4338496 [22] Wang F Y. Parallel control and management for intelligent transportation systems:concepts, architectures, and applications. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3):630-638 doi: 10.1109/TITS.2010.2060218 [23] 王飞跃, 李晓晨, 毛文吉, 王涛.社会计算的基本方法与应用.杭州:浙江大学出版社, 2012.Wang Fei-Yue, Li Xiao-Chen, Mao Wen-Ji, Wang Tao. Social Computing:Methods and Applications. Hangzhou:Zhejiang University Press, 2012. [24] 王飞跃. 社会能源与平行能源系统: 迈向能源5. 0的时代. 见: 分布式能源专业委员会筹备会及IEEE ITSS北京分会. 北京: 北方工业大学, 2015.Wang Fei-Yue. Social energy and parallel energy systems: towards the age of energy 5. 0. In: Workshop on Distributed Energy Systems and Annual Symposium of IEEE ITSS Beijing Chapter. Beijing, China: North China University of Technology, 2015. [25] 王飞跃, 赵杰, 伦淑娴.人工电力系统与复杂大电网的运营和管理.南方电网技术, 2008, 2(3):1-6 http://www.cqvip.com/QK/88821X/200803/27981370.htmlWang Fei-Yue, Zhao Jie, Lun Shu-Xian. Artificial power systems for the operation and management of complex power grids. Southern Power System Technology, 2008, 2(3):1-6 http://www.cqvip.com/QK/88821X/200803/27981370.html [26] 赵俊华, 文福拴, 薛禹胜, 董朝阳.电力信息物理融合系统的建模分析与控制研究框架.电力系统自动化, 2011, 35(16):1-8 http://mall.cnki.net/magazine/Article/DLXT201116000.htmZhao Jun-Hua, Wen Fu-Shuan, Xue Yu-Sheng, Dong Zhao-Yang. Modeling analysis and control research framework of cyber physical power systems. Automation of Electric Power Systems, 2011, 35(16):1-8 http://mall.cnki.net/magazine/Article/DLXT201116000.htm [27] 赵俊华, 文福拴, 薛禹胜, 李雪, 董朝阳.电力CPS的架构及其实现技术与挑战.电力系统自动化, 2010, 34(16):1-7 http://mall.cnki.net/magazine/article/DLXT201016000.htmZhao Jun-Hua, Wen Fu-Shuan, Xue Yu-Sheng, Li Xue, Dong Zhao-Yang. Cyber physical power systems:architecture, implementation techniques and challenges. Automation of Electric Power Systems, 2010, 34(16):1-7 http://mall.cnki.net/magazine/article/DLXT201016000.htm [28] Ilic M D, Xie L, Khan U A, Moura J M F. Modeling of future cyber-physical energy systems for distributed sensing and control. IEEE Transactions on Systems, Man, and Cybernetics. Part A:Systems and Humans, 2010, 40(4):825-838 doi: 10.1109/TSMCA.2010.2048026 [29] Xie L, Ilic M D. Module-based modeling of cyber-physical power systems. In: Proceedings of the 28th International Conference on Distributed Computing Systems Workshops. Beijing, China: IEEE, 2008. 513-518 http://dl.acm.org/citation.cfm?id=1439719 [30] McMillin B. Complexities of information security in cyber-physical power systems. In: Proceedings of the 2009 IEEE/PES Power Systems Conference and Exposition. Seattle, WA, USA: IEEE, 2009. 1-2 http://ieeexplore.ieee.org/document/4840093/ [31] Singh C, Sprintson A. Reliability assurance of cyber-physical power systems. In: Proceedings of the 2010 IEEE Power and Energy Society General Meeting. Minneapolis, MN, USA: IEEE, 2010. 1-6 http://www.researchgate.net/publication/224179251_Reliability_assurance_of_cyber-physical_power_systems [32] 邓建玲, 王飞跃, 陈耀斌, 赵向阳.从工业4.0到能源5.0:智能能源系统的概念、内涵及体系框架.自动化学报, 2015, 41(12):2003-2016 http://www.aas.net.cn/CN/abstract/abstract18774.shtmlDeng Jian-Ling, Wang Fei-Yue, Chen Yao-Bin, Zhao Xiang-Yang. From industries 4.0 to energy 5.0:concept and framework of intelligent energy systems. Acta Automatica Sinica, 2015, 41(12):2003-2016 http://www.aas.net.cn/CN/abstract/abstract18774.shtml [33] 王飞跃.指控5.0:平行时代的智能指挥与控制体系.指挥与控制学报, 2015, 1(1):107-120 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zhykzxb201501018Wang Fei-Yue. CC 5.0:intelligent command and control systems in the parallel age. Journal of Command and Control, 2015, 1(1):107-120 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zhykzxb201501018 [34] 江泽民.对中国能源问题的思考.上海交通大学学报, 2008, 42(3):345-359 http://mall.cnki.net/magazine/Article/SHJT200803002.htmJiang Ze-Min. Reflections on energy issues in China. Journal of Shanghai Jiaotong University, 2008, 42(3):345-359 http://mall.cnki.net/magazine/Article/SHJT200803002.htm [35] 张力. 概率安全评价中人因可靠性分析技术研究[博士学位论文], 湖南大学, 中国, 2004 http://cdmd.cnki.com.cn/Article/CDMD-10532-2005040162.htmZhang Li. The Research on Human Reliability Analysis Technique in Probabilistic Safety Assessment[Ph. D. dissertation], Hu'nan University, China, 2004 http://cdmd.cnki.com.cn/Article/CDMD-10532-2005040162.htm [36] 薛禹胜, 肖世杰.综合防御高风险的小概率事件:对日本相继天灾引发大停电及核泄漏事件的思考.电力系统自动化, 2011, 35(8):1-11 http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_dlxtzdh201108001Xue Yu-Sheng, Xiao Shi-Jie. Comprehensively defending high risk events with low probability. Automation of Electric Power Systems, 2011, 35(8):1-11 http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_dlxtzdh201108001 [37] 荆春宁, 赵科, 张力友, 李辉, 王诚诚, 钱怡洁, 等. "华龙一号"的设计理念与总体技术特征.中国核电, 2017, 10(4):463-467 http://www.cqvip.com/QK/89379X/201302/46329432.htmlJing Chun-Ning, Zhao Ke, Zhang Li-You, Li Hui, Wang Cheng-Cheng, Qian Yi-Jie, et al. The design philosophy and general technical features of HPR1000. China Nuclear Power, 2017, 10(4):463-467 http://www.cqvip.com/QK/89379X/201302/46329432.html [38] 朱正威, 王琼, 吕书鹏.多元主体风险感知与社会冲突差异性研究——基于Z核电项目的实证考察.公共管理学报, 2016, (2):97-106 http://www.cqvip.com/QK/87267X/201602/668566259.htmlZhu Zheng-Wei, Wang Qiong, Lv Shu-Peng. Research on differences of multiple stakeholders' risk perception and social conflict——Empirical investigation of Z nuclear power project. Journal of Public Management, 2016, (2):97-106 http://www.cqvip.com/QK/87267X/201602/668566259.html [39] 李鹏程, 张力, 戴立操, 邹衍华, 青涛, 胡鸿等.核电厂数字化主控室操纵员的情景意识可靠性模型.系统工程理论与实践, 2016, 36(1):243-252 doi: 10.12011/1000-6788(2016)01-0243-10Li Peng-Cheng, Zhang Li, Dai Li-Cao, Zou Yan-Hua, Qing Tao, Hu Hong, et al. Operator's situation awareness reliability model in digital main control rooms of nuclear power plants. Systems Engineering——Theory and Practice, 2016, 36(1):243-252 doi: 10.12011/1000-6788(2016)01-0243-10 [40] 王晓磊, 吕大刚.核电厂地震概率风险评估研究综述.土木工程学报, 2016, 49(11):52-68 http://www.cnki.com.cn/Article/CJFDTotal-DEFE201206003.htmWang Xiao-Lei, Lv Da-Gang. Review of seismic probability risk assessment of nuclear power plants. China Civil Engineering Journal, 2016, 49(11):52-68 http://www.cnki.com.cn/Article/CJFDTotal-DEFE201206003.htm [41] 苏罡.中国核能科技"三步走"发展战略的思考.科技导报, 2016, 34(15):33-41 http://blog.sciencenet.cn/blog-336909-1005353.htmlSu Gang. The "three steps development strategy" of China nuclear power science and technology. Science & Technology Review, 2016, 34(15):33-41 http://blog.sciencenet.cn/blog-336909-1005353.html [42] 王飞跃, 张俊.智联网:概念、问题和平台.自动化学报, 2017, 43(12):2061-2070 http://www.aas.net.cn/CN/abstract/abstract19181.shtmlWang Fei-Yue, Zhang Jun. Internet of minds:the concept, issues and platforms. Acta Automatica Sinica, 2017, 43(12):2061-2070 http://www.aas.net.cn/CN/abstract/abstract19181.shtml [43] 程乐峰, 余涛, 张孝顺, 殷林飞, 瞿凯平.信息-物理-社会融合的智慧能源调度机器人及其知识自动化:框架、技术与挑战.中国电机工程学报, 2018, 38(1):25-40 http://www.cnki.com.cn/Article/CJFDTotal-DLXT201415001.htmCheng Le-Feng, Yu Tao, Zhang Xiao-Shun, Yin Lin-Fei, Qu Kai-Ping. Cyber-physical-social systems based smart energy robotic dispatcher and its knowledge automation:framework, techniques and challenges. Proceedings of the CSEE, 2018, 38(1):25-40 http://www.cnki.com.cn/Article/CJFDTotal-DLXT201415001.htm [44] Wang F Y, Zhang J J, Wang X. Parallel intelligence:toward lifelong and eternal developmental AI and learning in cyber-physical-social spaces. Frontiers of Computer Science, 2018, 12(3):401-405 doi: 10.1007/s11704-018-7903-5 [45] 袁勇, 王飞跃.区块链技术发展现状与展望.自动化学报, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtmlYuan Yong, Wang Fei-Yue. Blockchain:the state of the art and future trends. Acta Automatica Sinica, 2016, 42(4):481-494 http://www.aas.net.cn/CN/abstract/abstract18837.shtml [46] 袁勇, 周涛, 周傲英, 段永朝, 王飞跃.区块链技术:从数据智能到知识自动化.自动化学报, 2017, 43(9):1485-1490 http://www.aas.net.cn/CN/abstract/abstract19125.shtmlYuan Yong, Zhou Tao, Zhou Ao-Ying, Duan Yong-Chao, Wang Fei-Yue. Blockchain technology:from data intelligence to knowledge automation. Acta Automatica Sinica, 2017, 43(9):1485-1490 http://www.aas.net.cn/CN/abstract/abstract19125.shtml [47] 袁勇, 王飞跃.平行区块链:概念、方法与内涵解析.自动化学报, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtmlYuan Yong, Wang Fei-Yue. Parallel blockchain:concept, methods and issues. Acta Automatica Sinica, 2017, 43(10):1703-1712 http://www.aas.net.cn/CN/abstract/abstract19148.shtml [48] 麦克卢尔, 斯卡姆布智, 库尔茨[著], 钟向群[译]. 黑客大曝光. 北京: 清华大学出版社, 2010.McClure S, Scambray J, Kurtz G[Author], Zhong Xiang-Qun[Translator]. Hacking Exposed. Beijing: Tsinghua University Press, 2010. [49] 王飞跃.计算实验方法与复杂系统行为分析和决策评估.系统仿真学报, 2015, 16(5):893-897 http://mall.cnki.net/magazine/Article/XTFZ200405008.htmWang Fei-Yue. Computational experiments for behavior analysis and decision evaluation of complex systems. Journal of System Simulation, 2015, 16(5):893-897 http://mall.cnki.net/magazine/Article/XTFZ200405008.htm [50] 王飞跃, 邱晓刚, 曾大军, 曹志冬, 樊宗臣.基于平行系统的非常规突发事件计算实验平台研究.复杂系统与复杂性科学, 2010, 7(4):1-10 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fzxtyfzxkx201004001Wang Fei-Yue, Qiu Xiao-Gang, Zeng Da-Jun, Cao Zhi-Dong, Fan Zong-Chen. A computational experimental platform for emergency response based on parallel systems. Complex Systems and Complexity Science, 2010, 7(4):1-10 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fzxtyfzxkx201004001 [51] 崔凯楠, 郑晓龙, 文丁, 赵学亮.计算实验研究方法及应用.自动化学报, 2013, 39(1):1157-1169 http://www.aas.net.cn/CN/abstract/abstract18148.shtmlCui Kai-Nan, Zheng Xiao-Long, Wen Ding, Zhao Xue-Liang. Researches and applications of computational experiments. Acta Automatica Sinica, 2013, 39(1):1157-1169 http://www.aas.net.cn/CN/abstract/abstract18148.shtml [52] 熊刚, 侯家琛, 刘胜, 张家麟, 付满昌.《控制科学与工程学科发展报告》专题报告"核电自动化".北京:中国科学技术出版社, 2011. 176-181Xiong Gang, Hou Jia-Chen, Liu Sheng, Zhang Jia-Lin, Fu Man-Chang. Chapter:Nuclear Power Automation, Report on Advances in Control Science and Engineering, Beijing:ChinaScience & Technology Press.2011. 176-181 [53] Xiong G, Dong X S, Hou J C. Chapter 14:Construction of artificial power systems based on ACP approach. Service Science, Management, and Engineering. Oxford:Elsevier Press and Hangzhou:Zhejiang University Press, 2012. [54] 王飞跃, 刘德荣, 熊刚, 程长建, 赵冬斌.复杂系统的平行控制理论及应用.复杂系统与复杂性科学, 2012, 9(3):1-12 http://mall.cnki.net/magazine/Article/FZXT201203002.htmWang Fei-Yue, Liu De-Rong, Xiong Gang, Cheng Chang-Jian, Zhao Dong-Bin. Parallel control theory of complex systems and applications. Complex Systems and Complexity Science, 2012, 9(3):1-12 http://mall.cnki.net/magazine/Article/FZXT201203002.htm [55] 熊刚, 王飞跃, 侯家琛, 董西松, 张家麟, 付满昌.提高核电站安全可靠性的平行系统方法.系统工程理论与实践, 2012, 32(5):1018-1026 doi: 10.12011/1000-6788(2012)5-1018Gang Xiong, Wang Fei-Yue, Hou Jia-Chen, Dong Xi-Song, Zhang Jia-Lin, Fu Man-Chang. To improve safety and reliability of nuclear power plant with parallel system method. Systems Engineering-Theory and Practice, 2012, 32(5):1018-1026 doi: 10.12011/1000-6788(2012)5-1018 [56] 王丹, 白佳. "和睦系统":中国核电数字化仪控新名片——专访北京广利核系统工程有限公司总经理江国进.中国核电, 2017, 10(3):302-305 http://zghd.cbpt.cnki.net/WKD/WebPublication/wkTextContent.aspx?colType=4&yt=2017&st=03Wang Dan, Bai Jia. FirmSys:a new business card of China's digital I & C system for nuclear power plant——Special interview with JIANG Guojin, Director, China Techenergy Co., Ltd.. China Nuclear Power, 2017, 10(3):302-305 http://zghd.cbpt.cnki.net/WKD/WebPublication/wkTextContent.aspx?colType=4&yt=2017&st=03 期刊类型引用(37)
1. 朱翠,罗宇豪,王占刚,戴娟. 新型蚁群算法规划核电厂巡检机器人路径. 核电子学与探测技术. 2025(01): 107-115 .  百度学术
百度学术2. 贺卫兵,杨尚,王浩丞,徐照. BIM技术在核电工程信息管理与业务协同中的应用. 施工技术(中英文). 2025(02): 118-125 . 百度学术3. 王翔宇,陈武晖,郭小龙,常喜强. 发电系统数字化研究综述. 发电技术. 2024(01): 120-141 . 百度学术4. 于翔,邹本振. 电磁域平行系统架构与模型构建方法研究. 图学学报. 2024(02): 325-331 . 百度学术5. 杨秦秦,徐欢,李林,杜丽琼,彭锦. 基于设备构型的核电复杂设备精益化管理方案研究. 机械设计. 2024(S1): 165-170 . 百度学术6. 张帆,葛世荣. 矿山数字孪生构建方法与演化机理. 煤炭学报. 2023(01): 510-522 . 百度学术7. Fei-Yue Wang,Jing Yang,Xingxia Wang,Juanjuan Li,Qing-Long Han. Chat with ChatGPT on Industry 5.0:Learning and Decision-Making for Intelligent Industries. IEEE/CAA Journal of Automatica Sinica. 2023(04): 831-834 . 必应学术8. 李诗濛,王飞跃. 平行设计:面向平行制造体系的非标机械方案设计流程. 智能科学与技术学报. 2023(02): 274-282 . 百度学术9. 徐建军,陈卫华,林加镇,王浩,张晓艳. 基于计算实验的核应急撤离预测平行系统设计. 自动化仪表. 2023(11): 74-79+84 . 百度学术10. 谢成龙,田露,刘培邦,李进,汤晨瑾,马斌,聂文. 核电厂DCS平行系统研发与应用. 电子技术应用. 2023(S1): 218-223 . 百度学术11. 包立,贺兴. 数字孪生核电站建设思路及关键技术. 电力与能源. 2023(06): 553-559+601 . 百度学术12. 李蓝鑫. 基于CAN总线的数字化专用动力控制设备系统设计. 工业控制计算机. 2022(02): 1-4 . 百度学术13. 张帆,田睿芳,张崇进,王世雄,李昊. 基于DT-LSTM的矿山液压支架顶梁疲劳寿命预测. 矿业研究与开发. 2022(10): 192-200 . 百度学术14. 李望平,苏冬燕. 国内核电公众沟通研究热点及发展趋势——基于CiteSpace的知识图谱分析. 南华大学学报(社会科学版). 2022(03): 7-16 . 百度学术15. 荆鑫,王华峰,刘潜峰,罗嗣梧,张凡. 基于ELMo-GCN的核电领域命名实体识别. 北京航空航天大学学报. 2022(12): 2556-2565 . 百度学术16. 汪顺覃,吴洲钇,刘日,王鹏飞,朱学微,丁锐. 核能5.0:平行理论在舆情管理系统中的应用. 产业与科技论坛. 2021(10): 32-35 . 百度学术17. 马晓宇,黄晓津. 基于FPGA的核电仪控系统发展与自主研发探索. 自动化仪表. 2021(06): 82-85+90 . 百度学术18. 王谦,刘洋. 智能技术在核电领域中的应用探究. 中国设备工程. 2021(17): 148-149 . 百度学术19. 张建波,王宇,聂雪军,吴国庆,刘久军,严俊. 智慧渔业时代的深远海养殖平台控制系统. 物联网学报. 2021(04): 120-136 . 百度学术20. 陈刚,王强,唐华俊. 基于平行系统的核电大数据应用探讨. 自动化仪表. 2021(S1): 300-303 . 百度学术21. 石进,李益婷. 平行竞争情报态势感知系统研究. 西南民族大学学报(人文社科版). 2020(02): 234-240 . 百度学术22. 石文静. 论核安全风险治理的法律路径. 南华大学学报(社会科学版). 2020(05): 10-18 . 百度学术23. 税碧垣. 智慧管网总体架构与发展策略思考. 油气储运. 2020(11): 1201-1218 . 百度学术24. 王经天,张明路,李满宏,王哲. 核燃料棒变形检测装置及其机械间隙补偿方法. 华中科技大学学报(自然科学版). 2020(12): 66-71 . 百度学术25. 税碧垣. 智慧管网的基本概念与总体建设思路. 油气储运. 2020(12): 1321-1330 . 百度学术26. 刘忠民,叶佩军,戴迪,王飞跃. 数字化装甲兵指挥人才培养质量评估模型. 指挥与控制学报. 2020(04): 388-392 . 百度学术27. 程乐峰,余涛,张孝顺,殷林飞. 机器学习在能源与电力系统领域的应用和展望. 电力系统自动化. 2019(01): 15-43 . 百度学术28. 贺伟超,宋宪均,张志强,高景斌,刘志宾,康炤旭. 基于平行理论核电站DCS远程运维系统体系方法初探. 自动化博览. 2019(01): 58-63 . 百度学术29. 彭大天,董建敏,蔡忠闽,张长青,彭勤科. 假数据注入攻击下信息物理融合系统的稳定性研究. 自动化学报. 2019(01): 196-205 . 本站查看30. 杨林瑶,韩双双,王晓,李玉珂,王飞跃. 网络系统实验平台:发展现状及展望. 自动化学报. 2019(09): 1637-1654 . 本站查看31. 侯家琛,董西松,熊刚,张俊,谭珂. 平行核电:迈向智慧核电的智能技术. 智能科学与技术学报. 2019(02): 192-201 . 百度学术32. 侯国莲,弓林娟,苏烨,唐耀华. 基于ACP的平行发电控制系统. 智能科学与技术学报. 2019(03): 269-279 . 百度学术33. 杨林瑶,陈思远,王晓,张俊,王成红. 数字孪生与平行系统:发展现状、对比及展望. 自动化学报. 2019(11): 2001-2031 . 本站查看34. 王飞跃,张军,张俊,王晓. 工业智联网:基本概念、关键技术与核心应用. 自动化学报. 2018(09): 1606-1617 . 本站查看35. 崔建勇. 数字技术在工业电气自动化中的应用及创新分析. 山东工业技术. 2018(24): 139 . 百度学术36. 李立军,王晓,商秀芹. 平行制造及其在纺织鞋服产业中的应用. 科技导报. 2018(21): 48-55 . 百度学术37. 王飞跃,高彦臣,商秀芹,张俊. 平行制造与工业5.0:从虚拟制造到智能制造. 科技导报. 2018(21): 10-22 . 百度学术其他类型引用(16)
-

 下载:
下载:
 下载:
下载:


计量
- 文章访问数: 3332
- HTML全文浏览量: 1098
- PDF下载量: 1078
- 被引次数: 53
