

Dynamic State Estimation of Smart Grid Based on UKF Under Denial of Service Attacks
-
摘要: 针对连续拒绝服务(Denial of service,DoS)攻击导致量测数据丢失使得动态状态估计失效、进而破坏智能电网安全经济运行问题,本文提出了一种适用拒绝服务攻击的改进无迹卡尔曼滤波(Unscented Kalman filter,UKF)方法,以进行智能电网动态状态估计.首先,分析拒绝服务攻击引起数据丢包特性并设计了数据补偿策略,以重构电力系统动态模型;然后,结合Holt's双参数指数平滑和无迹卡尔曼滤波方法,构造了融合补偿信息的新状态估计方程,并进一步基于估计误差协方差矩阵推导了状态增益更新方法,从而得到了无迹卡尔曼滤波动态状态估计新方法.最后,针对IEEE 30和118节点系统进行仿真,验证了所提方法的可行性和有效性.Abstract: When continuous denial of service (DoS) attacks cause measurement data losses in smart grid, the traditional dynamic state estimation is useless, destroying the running safety of smart grid seriously. To solve the problem, an improved unscented Kalman filter (UKF) is proposed, which can estimate the dynamic state of smart grid under DoS attacks. Firstly, the characteristics of data packet losses resulting from DoS attacks are analyzed and data compensation strategy is designed to reconstruct the dynamic model of power system. Integrating Holt's two-parameter exponential smoothing and unscented Kalman filter algorithms, a new state estimation equation including the compensation information is then constructed. Furthermore, a state gain updating method is derived from the estimated error covariance matrix, which produces a new enhanced UKF dynamic state estimation algorithm. Finally, simulations on IEEE 30-bus and 118-bus system confirm the feasibility and effectiveness of the proposed method.1) 本文责任编委 吴立刚
-

图 1 拒绝服务攻击下基于改进UKF动态状态估计流程图
Fig. 1 Flowchat of new-UKF dynamic state estimation algorithm under DoS attacks
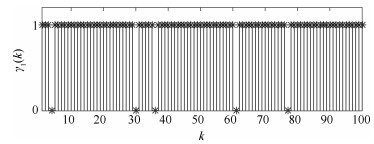
图 3 IEEE30节点系统丢包时序图$(\rho=0.05)$
Fig. 3 Data packet loss sequence of IEEE 30-bus system $(\rho=0.05)$

图 4 DoS攻击下节点2的电压幅值和相角的估计值$\left( \rho = 0.05 \right)$
Fig. 4 Estimated voltage magnitude and phase angle at bus 2 under DoS attacks $\left( \rho = 0.05 \right)$

图 5 DoS攻击下系统状态估计误差和性能指标$\left( \rho = 0.05 \right)$
Fig. 5 State estimation error and performance index of the system under DoS attacks $\left( \rho = 0.05 \right)$
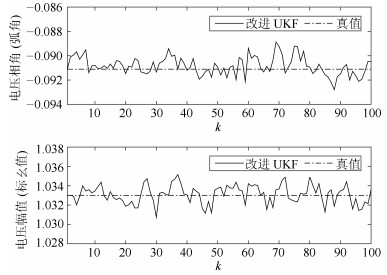
图 6 在DoS攻击下节点2的电压幅值和相角估计值$\left( \rho = 0.1 \right)$
Fig. 6 Estimated voltage magnitude and phase angle at bus 2 under DoS attacks $\left( \rho = 0.1 \right)$
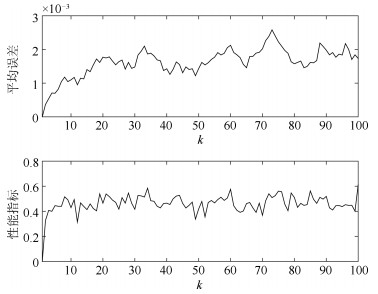
图 7 DoS攻击下系统状态估计误差和性能指标$\left( \rho = 0.1 \right)$
Fig. 7 State estimation error and performance index of the system under DoS attacks $\left( \rho = 0.1 \right)$
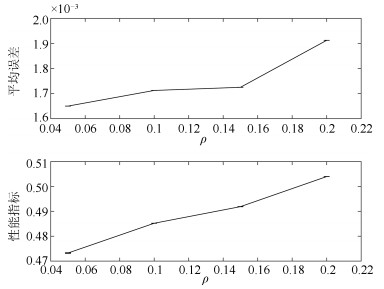
图 8 DoS攻击导致4种不同数据丢包概率下IEEE 30节点系统的状态估计误差和性能指标
Fig. 8 State estimation error and performance index of IEEE30-bus system with four different $\rho$ values

图 9 DoS攻击下IEEE 30节点系统采用改进UKF算法和传统UKF算法状态估计误差和性能指标比较$\left( \rho = 0.05 \right)$
Fig. 9 Comparison of state estimation error and performance index of IEEE 30-bus system by using new-UKF and UKF methods under DoS attacks $\left( \rho = 0.05 \right)$
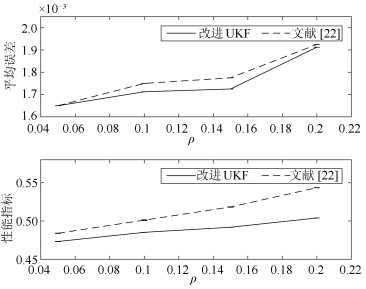
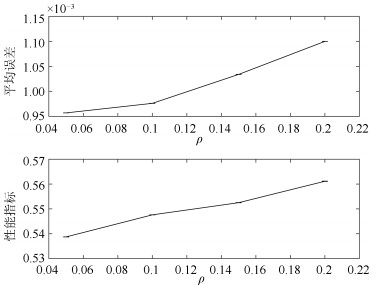
图 11 DoS攻击导致4种不同数据丢包概率下IEEE 118节点系统的状态估计误差和性能指标
Fig. 11 State estimation error and performance index of IEEE118-bus system with four different $\rho$ values

图 12 DoS攻击下IEEE 118节点系统采用改进UKF算法和传统UKF算法状态估计误差和性能指标比较$\left( \rho = 0.05 \right)$
Fig. 12 Comparison of state estimation error and performance index of IEEE 118-bus system by using new-UKF and UKF methods under DoS attacks $\left( \rho = 0.05 \right)$
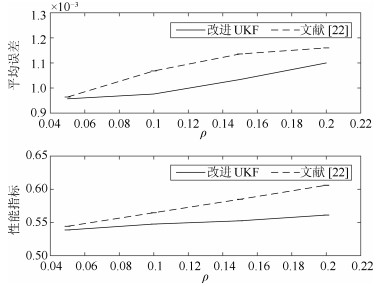
表 1 网络数据包传递表
Table 1 Data packet transmission in network
$k$ ${\lambda _k(1)}$ ${\lambda _k(2)}$ ${\lambda _k(3)}$ ${\phi _k}$ ${\tau _k}$ ${k - {\tau _k} + 1}$ ${\bar z_k}$ 1 1 0 1 1 ${z_1}$ 2 1 0 1 2 ${z_2}$ 3 0 1 1 2 2 ${z_2}$ 4 0 0 1 2 3 2 ${z_2}$ 5 1 0 1 5 ${z_5}$ 6 0 1 1 2 5 ${z_5}$ 7 1 0 1 7 ${z_7}$ 8 0 1 1 2 7 ${z_7}$ 9 1 0 1 9 ${z_9}$ 10 1 0 1 10 ${z_{10}}$  下载: 导出CSV
下载: 导出CSV
表 2 IEEE 30节点系统动态状态估计结果
Table 2 Dynamic state estimation results of IEEE 30-bus system
k 25 50 75 100 状态真值 ${x_2}$ -0.1314 -0.1322 -0.1312 -0.1312 -0.1311 ${x_4}$ -0.2497 -0.2495 -0.2493 -0.2505 -0.2481 ${x_6}$ -0.2259 -0.2261 -0.2256 -0.2252 -0.2249 ${x_8}$ -0.2450 -0.2456 -0.2456 -0.2463 -0.2460 ${x_{10}}$ -0.2443 -0.2462 -0.2443 -0.2473 -0.2460 ${x_{12}}$ -0.2636 -0.2627 -0.2625 -0.2655 -0.2656 ${x_{14}}$ -0.2800 -0.2816 -0.2807 -0.2791 -0.2809 ${x_{16}}$ -0.2776 -0.2792 -0.2783 -0.2807 -0.2780 ${x_{18}}$ -0.2935 -0.2941 -0.2923 -0.2937 -0.2940 ${x_{20}}$ -0.2822 -0.2859 -0.2842 -0.2841 -0.2842 ${x_{22}}$ -0.2826 -0.2863 -0.2847 -0.2837 -0.2844 ${x_{24}}$ -0.2838 -0.2788 -0.2842 -0.2824 -0.2815 ${x_{26}}$ -0.2739 -0.2715 -0.2746 -0.2708 -0.2741 ${x_{28}}$ -0.2929 -0.2898 -0.2966 -0.2923 -0.2963 ${x_{30}}$ 1.0606 1.0603 1.0599 1.0595 1.0600 ${x_{32}}$ 1.0127 1.0150 1.0119 1.0132 1.0135 ${x_{34}}$ 0.9986 1.0012 1.0015 0.9973 1.0000 ${x_{36}}$ 0.9906 0.9935 0.9925 0.9900 0.9924 ${x_{38}}$ 1.0299 1.0327 1.0280 1.0309 1.0305 ${x_{40}}$ 1.0711 1.0718 1.0690 1.0747 1.0720 ${x_{42}}$ 1.0734 1.0743 1.0687 1.0718 1.0710 ${x_{44}}$ 1.0202 1.0214 1.0184 1.0208 1.0194 ${x_{46}}$ 1.0085 1.0140 1.0085 1.0136 1.0116 ${x_{48}}$ 0.9994 1.0019 0.9952 1.0031 0.9996 ${x_{50}}$ 1.0000 1.0020 0.9980 1.0005 1.0008 ${x_{52}}$ 1.0005 1.0025 0.9985 1.0013 1.0012 ${x_{54}}$ 0.9955 0.9961 0.9926 0.9919 0.9945 ${x_{56}}$ 1.0058 1.0086 1.0052 1.0037 1.0053 ${x_{58}}$ 0.9863 0.9889 0.9860 0.9845 0.9851
下载: 导出CSV
-
[1] Rehmani M H, Reisslein M, Rachedi A, Kantarci M E, Radenkovic M. Integrating renewable energy resources into the smart grid:recent developments in information and communication technologies.IEEE Transactions on Industrial Informatics, 2018, 14(7):2814-2825 doi: 10.1109/TII.2018.2819169 [2] Tuballa M L, Abundo M L.A review of the development of smart grid technologies.Renewable & Sustainable Energy Reviews, 2016, 59:710-725 http://d.old.wanfangdata.com.cn/OAPaper/oai_doaj-articles_331e96e3ebac763a2f54c4b4d5dbde1d [3] Li X, Tian Y C, Ledwitch G, Mishra Y, Han X Q, Zhou C J. Constrained optimization of multicast routing for wide area control of smart grid.IEEE Transactions on Smart Grid, 2018, DOI: 10.1109/TSG.2018.2835487 [4] Chakrabortty A, Bose A.Smart grid simulations and their supporting implementation methods.Proceedings of the IEEE, 2017, 105(11):2220-2243 doi: 10.1109/JPROC.2017.2737635 [5] 孙秋野, 滕菲, 张化光.能源互联网及其关键控制问题.自动化学报, 2017, 43(2):176-194 http://www.aas.net.cn/CN/abstract/abstract18999.shtmlSun Qiu-Ye, Teng Fei, Zhang Hua-Guang.Energy internet and its key control issues.Acta Automatica Sinica, 2017, 43(2):176-194 http://www.aas.net.cn/CN/abstract/abstract18999.shtml [6] Uzunoglu B, Ulker M A.Maximum likelihood ensemble filter state estimation for power systems.IEEE Transactions on Instrumentation & Measurement, 2018, 67(9):2097-2106 http://www.researchgate.net/publication/322831414_Maximum_Likelihood_Ensemble_Filter_State_Estimation_for_Power_Systems [7] Ghosal M, Rao V.Fusion of multirate measurements for nonlinear dynamic state estimation of the power systems.IEEE Transactions on Smart Grid, 2019, 10(1):216-226 doi: 10.1109/TSG.2017.2737359 [8] Hu L, Wang Z, Rahman I, Liu X.A constrained optimization approach to dynamic state estimation for power systems Including PMU and missing measurements.IEEE Transactions on Control Systems Technology, 2016, 24(2):703-710 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5e316d5660c775529020e69097f0fe4f [9] Yan H, Zhou X, Zhang H, Yang F, Wu Z G.A novel sliding mode estimation for microgrid control with communication time delays. IEEE Transactions on Smart Grid, 2017, DOI: 10.1109/TSG.2017.2771493 [10] Zhao J, Netto M, Mili L.A robust iterated extended Kalman filter for power system dynamic state estimation.IEEE Transactions on Power Systems, 2017, 32(4):3205-3216 doi: 10.1109/TPWRS.2016.2628344 [11] Julier S J, Uhlmann J K, Durrant-Whyte H F.A new approach for filtering nonlinear systems.In:Proceedings of the American Control Conference.Seattle, WA, USA:IEEE, 1995.1628-1632 http://www.researchgate.net/publication/3650755_A_new_approach_for_filtering_nonlinear_systems [12] Zhao J, Mili L.Robust unscented Kalman filter for power system dynamic state estimation with unknown noise statistics.IEEE Transactions on Smart Grid, 2017, DOI: 10.1109/TSG.2017.2761452 [13] Zhao J.Power system dynamic state estimation considering measurement correlations.IEEE Transactions on Energy Conversion, 2017, 32(4):1630-1632 doi: 10.1109/TEC.2017.2742405 [14] Qi J, Sun K, Wang J, Liu H.Dynamic state estimation for multi-machine power system by unscented Kalman filter with enhanced numerical stability.IEEE Transactions on Smart Grid, 2018, 9(2):1184-1196 doi: 10.1109/TSG.2016.2580584 [15] Liang G, Zhao J, Luo F, Weller S, Dong Z Y.A review of false data injection attacks against modern power systems.IEEE Transactions on Smart Grid, 2016, 8(4):1630-1638 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=10.1177/000271621707300102 [16] 梁耀, 冯冬芹, 徐珊珊, 陈思媛, 高梦州.加密传输在工控系统安全中的可行性研究.自动化学报, 2018, 44(3):434-442 http://www.aas.net.cn/CN/abstract/abstract19236.shtmlLiang Yao, Feng Dong-Qin, Xu Shan-Shan, Chen Si-Yuan, Gao Meng-Zhou. Feasibility analysis of encrypted transmission on security of industrial control systems.Acta Automatica Sinica, 2018, 44(3):434-442 http://www.aas.net.cn/CN/abstract/abstract19236.shtml [17] Liang J, Sankar L, Kosut O.Vulnerability analysis and consequences of false data Injection attack on power system state estimation. IEEE Transactions on Power Systems, 2016, 31(5):3864-3872 doi: 10.1109/TPWRS.2015.2504950 [18] Li Z, Shahidehpour M, Aminifar F.Cybersecurity in distributed power systems.Proceedings of the IEEE, 2017, 105(7):1367-1388 doi: 10.1109/JPROC.2017.2687865 [19] Wolf M, Serpanos D.Safety and security in cyber-physical systems and internet-of-things systems.Proceedings of the IEEE, 2018, 106(1):9-20 doi: 10.1109/JPROC.2017.2781198 [20] Zhang B, Li Q, Zhang Y, Chen X.The proactive defense of energy internet terminals edge-access using the network topology autoassociation.IEEE Journal on Emerging & Selected Topics in Circuits & Systems, 2017, 7(3):432-446 http://www.researchgate.net/publication/318126671_The_Proactive_Defense_of_Energy_Internet_Terminals_Edge-Access_Using_the_Network_Topology_Autoassociation [21] Zhang H, Qi Y, Wu J, Fu L, He L.DoS attack energy management against remote state estimation.IEEE Transactions on Control of Network Systems, 2018, 5(1):383-394 doi: 10.1109/TCNS.2016.2614099 [22] Li L, Xia Y.Stochastic stability of the unscented Kalman filter with intermittent observations.Automatica, 2012, 48(5):978-981 doi: 10.1016/j.automatica.2012.02.014 [23] Zhao S, Ma Y, Huang B.Robust FIR state estimation of dynamic processes corrupted by outliers.IEEE Transactions on Industrial Informatics, 2019, 15(1):139-147 doi: 10.1109/TII.2018.2829167 [24] Zhang H, Cheng P, Shi L, Chen J.Optimal DoS attack scheduling in wireless networked control system.IEEE Transactions on Control Systems Technology, 2016, 24(3):843-852 doi: 10.1109/TCST.2015.2462741 [25] Befekadu G K, Gupta V, Antsaklis P J.Risk-Sensitive control under Markov modulated denial-of-service (DoS) attack strategies. IEEE Transactions on Automatic Control, 2015, 60(12):3299-3304 doi: 10.1109/TAC.2015.2416926 [26] 李云, 孙书利, 郝钢.基于Gauss-Hermite逼近的非线性加权观测融合无迹Kalman滤波器.自动化学报, 2018, DOI: 10.16383/j.aas.2018.c170534Li Yun, Sun Shu-Li, Hao Gang.Weighted measurement fusion unscented Kalman filter based on Gauss-Hermite approximation for nonlinear systems.Acta Automatica Sinica, 2018, DOI: 10.16383/j.aas.2018.c170534. [27] Havangi R.Robust SLAM:SLAM base on H∞ square root unscented Kalman filter.Nonlinear Dynamics, 2016, 83(1-2):767-779 doi: 10.1007/s11071-015-2365-x [28] Yu S, Emami K, Fernando T, Iu H H C, Wong K P.State estimation of doubly fed induction generator wind turbine in complex power systems.IEEE Transactions on Power Systems, 2016, 31(6):4935-4944 doi: 10.1109/TPWRS.2015.2507620 [29] Julier S J.The scaled unscented transformation.In:Proceedings of the American Control Conference.Anchorage, AK, USA:IEEE, 2002. 4555-4559 [30] Sun Q, Lim C C, Shi P, Liu F.Design and stability of moving horizon estimator for Markov jump linear systems.IEEE Transactions on Automatic Control, 2018, DOI: 10.1109/TAC.2018.2816102 [31] Guo L, Huang D G, Maximum likelihood principle based adaptive UKF algorithm.International Journal of Signal Processing, 2016, 9(9): 167-175 -

 下载:
下载:

计量
- 文章访问数: 3481
- HTML全文浏览量: 489
- PDF下载量: 916
- 被引次数: 0
