

Regional Traffic Signal Control Considering the Dynamic Characteristics of Traffic Flow
-
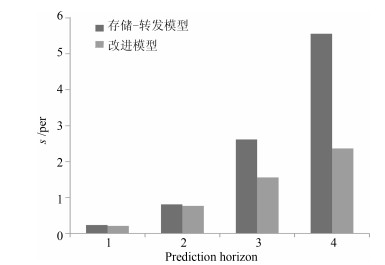
摘要: 针对区域交通信号,考虑智能交通系统中交通流的动态特性,提出了区域交通系统改进的存储-转发模型.考虑大型区域的复杂性和协调性,将区域交通划分成N个子区域,分别建立了对应的子区域模型.针对子区域模型,提出了基于分层模型预测控制的过饱和区域交通信号控制优化目标.通过引入拉格朗日对偶原理解决约束条件问题的方法,对子区域的车辆排队数量进行了预测,并对有效绿灯时间进行优化控制.为了验证所提区域交通控制算法的有效性,给出了本文改进的模型与存储-转发模型的对比仿真.实验结果表明,在达到相同的控制效果时,本文改进模型的控制算法所需的计算时间较短,计算成本较低.Abstract: In this paper, regional traffic signal control is studied. Considering the dynamic characteristics of traffic flow, an improved store-forward model is proposed. Due to the complexity and coordination of regional traffic, a large-scale regional traffic is divided into several sub-regions using a region decomposition method firstly. Secondly, the optimization problem of the large-scale regional traffic is presented based on Hico-MPC. Lagrange dual theory multipliers are introduced to deal with interconnecting constraints among sub-regions. Then we forecast the vehicle queue of sub-regions and optimize the green light time. Finally, the simulation is presented to illustrate the effectiveness of the improved model by comparing with the store-forward model. The results show that the improved model requires less computation time and lower computational cost when the same control effect is achieved.
-
Key words:
- Regional traffic /
- the dynamic characteristics /
- improved model /
- hierarchical MPC
-
-
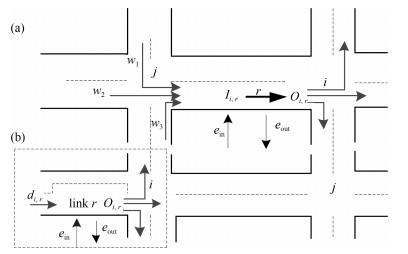
图 1 交通流$r$的交通动态图
((a)交通流无外界输入; (b)交通流有外界输入(虚线))
Fig. 1 Traffic dynamics
((a) Traffic without input; (b) Traffic with inputdotted lines)
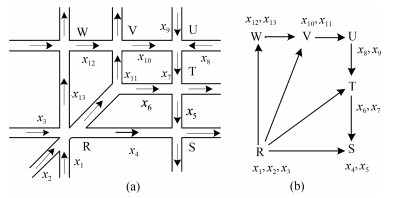
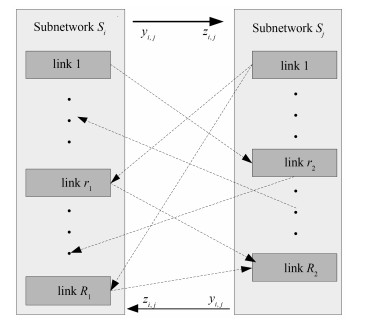
图 2 区域分解的例子
((a)实验区域; (b)实验区域的分解情况)
Fig. 2 Example of network decomposition
((a) A test network; (b) The decomposition of (a))
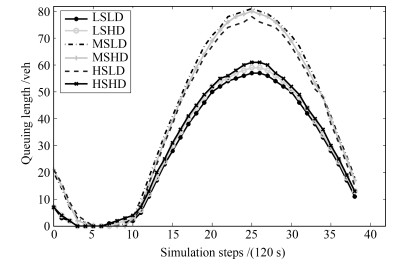
图 11 本文改进模型控制的交通流$x_{3}$的变化
Fig. 11 The changing of traffic $x_{3}$ under proposed model

图 12 存储转发模型控制的交通流$x_{3}$的变化
Fig. 12 The changing of traffic $x_{3}$ under store and forward model
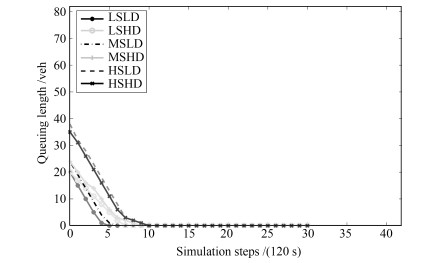
图 13 本文改进模型控制的交通流$x_{7}$的变化
Fig. 13 The changing of traffic $x_{7}$ under proposed model
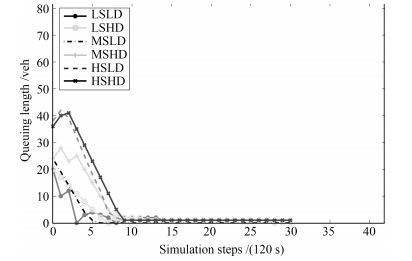
图 14 存储转发模型控制的交通流$x_{7}$的变化
Fig. 14 The changing of traffic $x_{7}$ under store and forward model
表 1 基本参数的定义
Table 1 Definitions of basic parameters
参数 变量 仿真值 周期时长 $C$ 120 s 损失时间 $L$ 20 s 控制间隔 $T$ 120 s 车辆平均长度 $l$ 5 m  下载: 导出CSV
下载: 导出CSV
2(a) 测试网中的转弯率
2(a) Turning rates of the test network
${\tau _{w, r}}$ $x_1$ $x_2$ $x_3$ $x_4$ $x_5$ $x_6$ $x_1$ 0 0 0 0.2 0 0.5 $x_2$ 0 0 0 0.15 0 0.35 $x_3$ 0 0 0 0.5 0 0.15 $x_4$ 0 0 0 0 0 0 $x_5$ 0 0 0 0 0 0 $x_6$ 0 0 0 0 0.3 0 $x_7$ 0 0 0 0 0.6 0 $x_8$ 0 0 0 0 0 0 $x_9$ 0 0 0 0 0 0 $x_{10}$ 0 0 0 0 0 0 $x_{11}$ 0 0 0 0 0 0
下载: 导出CSV
2(b) 测试网中的转弯率
2(b) Turning rates of the test network
${\tau _{w, r}}$ $x_7$ $x_8$ $x_9$ $x_{10}$ $x_{11}$ $x_{12}$ $x_{13}$ $x_1$ 0 0 0 0 0.15 0 0.5 $x_2$ 0 0 0 0 0.35 0 0.15 $x_3$ 0 0 0 0 0.2 0 0.15 $x_4$ 0 0 0 0 0 0 0 $x_5$ 0 0 0 0 0 0 0 $x_6$ 0 0 0 0 0 0 0 $x_7$ 0 0 0 0 0 0 0 $x_8$ 0.4 0 0 0.6 0 0 0 $x_9$ 0.6 0 0 0.4 0 0 0 $x_{10}$ 0 0 0 0 0 0.7 0 $x_{11}$ 0 0 0 0 0 0.3 0
下载: 导出CSV
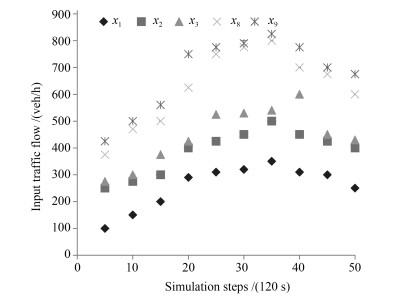
表 3 初始状态和扰动
Table 3 initial states and disturbances
$\text{定义}$ $\text{描述}$ $\text{范围}$ $I_{L}$ $\text{低初态}$ $x_{i}^{6, 11}\in[25, 50), x_{i}^{4, 13}\in[20, 40), x_{i}^{\rm other}\in[10, 20)$ $I_{M}$ $\text{中初态}$ $x_{i}^{6, 11}\in[45, 80), x_{i}^{4, 13}\in[35, 60), x_{i}^{\rm other}\in[15, 30)$ $I_{H}$ $\text{高初态}$ $x_{i}^{6, 11}\in[60, 100), x_{i}^{4, 13}\in[50, 80), x_{i}^{\rm other}\in[20, 40)$ $e_{L}$ $\text{低扰动}$ $e_{i}^{6, 11}\in[5, 10), e_{i}^{4, 13}\in[4, 8), e_{i}^{\rm other}\in[2, 4)$ $e_{H}$ $\text{高扰动}$ $e_{i}^{6, 11}\in[8, 15), e_{i}^{4, 13}\in[6, 10), e_{i}^{\rm other}\in[4, 6)$ 注: $x_i^{6, 11}$表示交通流$\{{x_6}, {x_{11}}\} $现有的排队长度, $x_i^{4, 13}$表示交通流$\{{x_4}, {x_{13}}\} $现有的排队长度, ${x^{\rm other}}$表示其他交通流现有的排队长度.同理$x_i^{6, 11}$, $x_i^{4, 13}$, ${x^{\rm other}}$表示相应交通流的扰动.
下载: 导出CSV
-
[1] Jang K, Kim H, Jang I G. Traffic signal optimization for oversaturated urban networks:queue growth equalization. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4):2121-2128 doi: 10.1109/TITS.2015.2398896 [2] Meng X, Tang S H, Liu X M, Zhang L. Oversaturated traffic signal optimization based on active control. In: Proceedings of the 2016 IEEE International Conference on Intelligent Transportation Engineering (ICITE). Singapore: IEEE, 2016. 91-95 [3] 刘小明, 唐少虎, 朱凤华, 陈兆盟.基于MFD的城市区域过饱和交通信号优化控制.自动化学报, 2017, 43(7):1220-1233 http://www.aas.net.cn/CN/abstract/abstract19095.shtmlLiu Xiao-Ming, Tang Shao-Hu, Zhu Feng-Hua, Chen Zhao-Meng. Urban area oversaturated traffic signal optimization control based on MFD. Acta Automatica Sinica, 2017, 43(7):1220-1233 http://www.aas.net.cn/CN/abstract/abstract19095.shtml [4] 朱宇轩, 李少远.双层模型预测控制系统的多包镇定域分析与系统设计.自动化学报, 2018, 44(2):262-269 http://www.aas.net.cn/CN/abstract/abstract19221.shtmlZhu Yu-Xuan, Li Shao-Yuan. Analysis and system design of multi-convex hull stabilization domain for double-layered model predictive control system. Acta Automatica Sinica, 2018, 44(2):262-269 http://www.aas.net.cn/CN/abstract/abstract19221.shtml [5] Aboudolas K, Papageorgiou M, Kosmatopoulos E. Store-and-forward based methods for the signal control problem in large-scale congested urban road networks. Transportation Research Part C:Emerging Technologies, 2009, 17(2):163-174 doi: 10.1016/j.trc.2008.10.002 [6] Lin S, De Schutter B, Xi Y G, Hellendoorn H. Efficient network-wide model-based predictive control for urban traffic networks. Transportation Research Part C:Emerging Technologies, 2012, 24:122-140 doi: 10.1016/j.trc.2012.02.003 [7] Lin S, De Schutter B, Xi Y G, Hellendoorn H. Fast model predictive control for urban road networks via MILP. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3):846-856 doi: 10.1109/TITS.2011.2114652 [8] Zhou X H, Ye B L, Lu Y Z, Xiong R. A novel MPC with chance constraints for signal splits control in urban traffic network. IFAC Proceedings Volumes, 2014, 47(3):11311-11317 doi: 10.3182/20140824-6-ZA-1003.01187 [9] Tettamanti T, Varga I. Distributed traffic control system based on model predictive control. Periodica Polytechnica Civil Engineering, 2010, 54(1):3-9 doi: 10.3311/pp.ci.2010-1.01 [10] Negenborn R R, De Schutter B, Hellendoorn J. Multi-agent model predictive control for transportation networks:serial versus parallel schemes. Engineering Applications of Artificial Intelligence, 2008, 21(3):353-366 doi: 10.1016/j.engappai.2007.08.005 [11] De Oliveira L B, Camponogara E. Multi-agent model predictive control of signaling split in urban traffic networks. Transportation Research Part C:Emerging Technologies, 2010, 18(1):120-139 doi: 10.1016/j.trc.2009.04.022 [12] Camponogara E, Scherer H F. Distributed optimization for model predictive control of linear dynamic networks with control-input and output constraints. IEEE Transactions on Automation Science and Engineering, 2011, 8(1):233-242 doi: 10.1109/TASE.2010.2061842 [13] Sirmatel I I, Geroliminis N. Economic model predictive control of large-scale urban road networks via perimeter control and regional route guidance. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(4):1112-1121 doi: 10.1109/TITS.2017.2716541 [14] Ye B L, Wu W M, Mao W J. Distributed model predictive control method for optimal coordination of signal splits in urban traffic networks. Asian Journal of Control, 2015, 17(3):775-790 doi: 10.1002/asjc.1011 [15] Ye B L, Wu W M, Li L X, Mao W J. A hierarchical model predictive control approach for signal splits optimization in large-scale urban road networks. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(8):2182-2192 doi: 10.1109/TITS.2016.2517079 [16] Gazis D C, Potts, R B. The oversaturated intersection. In: Proceedings of the 2nd International Symposium on the Theory of Traffic Flow. London, UK: ARRB Group Ltd., 1963. 221-237 [17] Xing T, Zhou X S. Finding the most reliable path with and without link travel time correlation:a Lagrangian substitution based approach. Transportation Research Part B:Methodological, 2011, 45(10):1660-1679 doi: 10.1016/j.trb.2011.06.004 -



计量
- 文章访问数: 1829
- HTML全文浏览量: 315
- PDF下载量: 177
- 被引次数: 0
