

-
摘要: 针对矿渣微粉(Ground granulated blast-furnace slag,GGBS)生产这一多变量、强耦合、多工况的复杂非线性过程,本文根据大量生产数据,提炼出矿渣微粉生产过程的三个典型工况.求解多工况多目标优化问题以求得最优设定值.建立多工况下的递归神经网数据驱动模型,并采用自适应动态规划方法,建立多个控制器,结合加权多模型控制,实现矿渣微粉生产过程在多工况切换情况下的自适应控制.通过过程运行优化、跟踪控制优化、通讯、工业以太网等信息资源与矿渣微粉生产物理资源之间的融合,构建基于信息物理系统(Cyber-physical system,CPS)的矿渣微粉生产优化控制系统.实验分析表明,本文提出的基于CPS的多模型自适应控制器,能够有效实现多工况条件下矿渣微粉生产过程的自适应控制,减小超调量,提高控制品质.Abstract: Considering the multivariable, strong-coupling, multi-conditions complex nonlinear ground granulated blast-furnace slag (GGBS) production process, this paper extracts three typical working conditions based on massive process data. Multiple optimal setpoints are obtained by resolving the multi-objective problems under different working conditions. For each condition, a data-based model is established using the recurrent neural network. Correspondingly, multiple controllers are designed by the adaptive dynamic programming method. Adopting the weighted multiple model adaptive control, adaptive control of the GGBS production in multiple conditions is realized. Integrating cyber resources including process operating optimization, tracking control optimization, communication, industrial Ethernet and physical resource of GGBS production, a optimal control system of GGBS production process is constructed based on the cyber-physical system (CPS). Experiment shows that the proposed multiple model adaptive control method can achieve adaptive control of the GGBS production process, reduce system overshoot and improve the control quality.1) 本文责任编委 乔俊飞
-

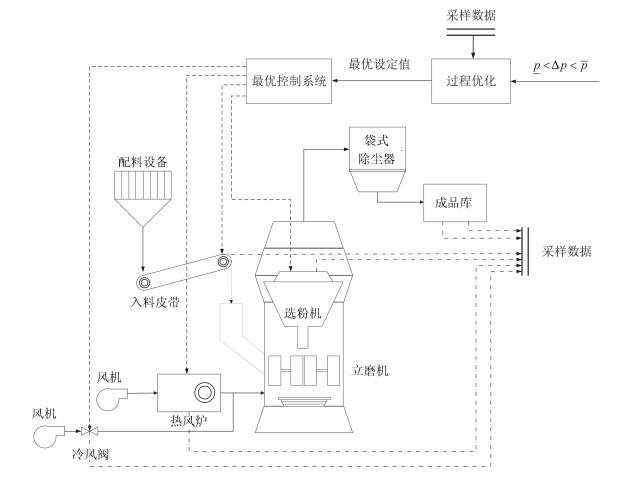
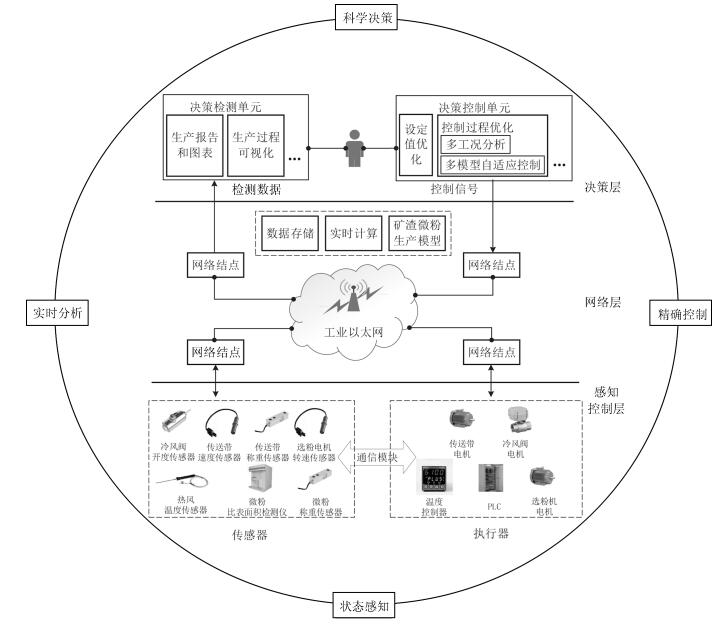
图 4 矿渣微粉生产最优控制系统CPS硬件结构
Fig. 4 The CPS hardware structure of GGBS production optimal control system

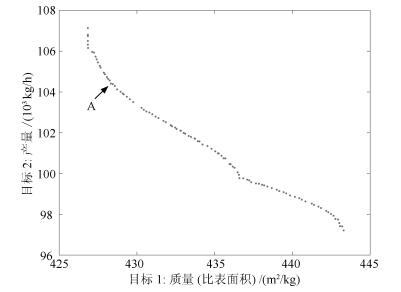
图 6 多目标优化设定值流程
Fig. 6 Flow chart of set-point optimization using multi-objective optimization algorithm
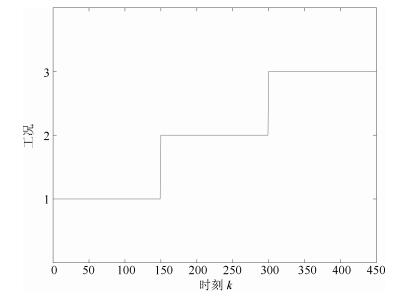
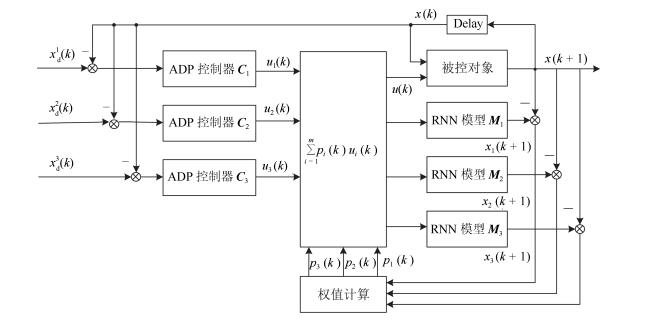
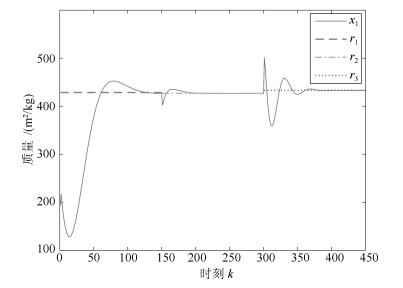
图 13 多模型ADP工况切换识别
Fig. 13 Working condition identification using the multiple model ADP algorithm
表 1 各控制变量允许变化范围
Table 1 Permitted range for each variable
名称 变量 最小值 最大值 单位 喂料量 $u_1$ 75 115 $10^3 {\rm kg/h}$ 选粉机转速 $u_2$ 850 1 250 ${\rm r/min}$ 入磨风温 $u_3$ 190 300 ℃ 冷风阀开度 $u_4$ 30 95 $\%$  下载: 导出CSV
下载: 导出CSV
表 2 微粉厂3号矿渣微粉生产线生产工况1运行数据
Table 2 Process data for GGBS production line 3 in condition 1
编号 喂料量 电机转速 入磨风温 冷风阀开度 比表面积 产品产量 ($10^3$ kg/h) (r/min) (℃) (%) ($\rm{m}^2$/kg) ($10^3$ kg/h) 1 101.76 1 090.31 240.71 63.46 451.75 95.12 2 103.44 1 089.70 241.10 64.96 436.13 102.17 3 108.15 1 099.65 265.08 57.08 419.30 106.16 $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ 198 108.95 1 089.32 249.54 65.82 435.96 102.49 199 103.84 1 089.06 244.98 66.06 431.47 102.40 200 102.12 1 119.46 266.82 61.03 427.28 92.61
下载: 导出CSV
表 3 微粉厂3号矿渣微粉生产线生产工况2运行数据
Table 3 Process data for GGBS production line 3 in condition 2
编号 喂料量 电机转速 入磨风温 冷风阀开度 比表面积 产品产量 ($10^3$ kg/h) (r/min) (℃) (%) ($\rm{m}^2$/kg) ($10^3$ kg/h) 1 84.24 1 249.09 234.88 63.80 439.75 79.33 2 86.89 1 251.25 231.13 66.85 431.42 82.05 3 82.54 1 249.28 241.51 63.24 428.76 76.55 $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ 198 84.94 1 159.96 228.21 65.72 427.26 80.49 199 85.64 1 239.06 242.95 62.55 439.88 78.54 200 85.42 1 248.68 233.01 69.12 424.21 78.75
下载: 导出CSV
表 4 微粉厂3号矿渣微粉生产线生产工况3运行数据
Table 4 Process data for GGBS production line 3 in condition 3
编号 喂料量 电机转速 入磨风温 冷风阀开度 比表面积 产品产量 ($10^3$ kg/h) (r/min) (℃) (%) ($\rm{m}^2$/kg) ($10^3$ kg/h) 1 104.09 1 015.28 216.60 61.44 435.62 96.91 2 104.66 998.94 250.78 57.66 423.72 95.04 3 102.15 1 000.03 237.65 59.70 445.55 94.23 $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ $\vdots$ 198 92.77 1 020.70 263.63 55.51 433.80 83.13 199 106.54 1 011.66 236.26 62.65 443.47 97.64 200 93.11 1 009.24 209.42 56.66 426.29 87.44
下载: 导出CSV
-
[1] Saranya P, Nagarajan P, Shashikala A P. Eco-friendly GGBS concrete:a state-of-the-art review. IOP Conference Series:Materials Science and Engineering, 2018, 330(1):012057 [2] Li X L, Jia C, Liu D X, Ding D W. Nonlinear adaptive control using multiple models and dynamic neural networks. Neurocomputing, 2014, 136:190-200 doi: 10.1016/j.neucom.2014.01.013 [3] Li X L, Jia C, Wang K, Wang J. Trajectory tracking of nonlinear system using multiple series-parallel dynamic neural networks. Neurocomputing, 2015, 168:1-12 doi: 10.1016/j.neucom.2015.06.024 [4] Wei Q L, Song R Z, Yan P F. Data-driven zero-sum neuro-optimal control for a class of continuous-time unknown nonlinear systems with disturbance using ADP. IEEE Transactions on Neural Networks and Learning Systems, 2016, 27(2):444-458 doi: 10.1109/TNNLS.2015.2464080 [5] 王康, 李晓理, 贾超, 宋桂芝.基于自适应动态规划的矿渣微粉生产过程跟踪控制.自动化学报, 2016, 42(10):1542-1551 http://www.aas.net.cn/CN/abstract/abstract18941.shtmlWang Kang, Li Xiao-Li, Jia Chao, Song Gui-Zhi. Optimal tracking control for slag grinding process based on adaptive dynamic programming. Acta Automatica Sinica, 2016, 42(10):1542-1551 http://www.aas.net.cn/CN/abstract/abstract18941.shtml [6] 信息物理系统白皮书(2017).中国电子技术标准化研究院, 2017Cyber-physical systems white paper (2017). China Electronics Standardization Institute, 2017 [7] Zhao H Z, Sun D H, Yue H, Zhao M, Cheng S L. Using CSTPNs to model traffic control CPS. IET Software, 2017, 11(3):116-125 doi: 10.1049/iet-sen.2016.0119 [8] 马大中, 胡旭光, 孙秋野.基于大维数据驱动的油气管网泄漏监控模糊决策方法.自动化学报, 2017, 43(8):1370-1382 http://www.aas.net.cn/CN/abstract/abstract19111.shtmlMa Da-Zhong, Hu Xu-Guang, Sun Qiu-Ye. A large dimensional data-driven fuzzy detection method for oil-gas pipeline network leakage. Acta Automatica Sinica, 2017, 43(8):1370-1382 http://www.aas.net.cn/CN/abstract/abstract19111.shtml [9] Li D, Zhan M Y, Zhang X Z, Fang Z P, Liu H Q. ISAR imaging of nonuniformly rotating target based on the multicomponent CPS model under low SNR environment. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3):1119-1135 doi: 10.1109/TAES.2017.2667538 [10] Zhang Y, Qiu M K, Tsai C W, Hassan M M, Alamri A. Health-CPS:healthcare cyber-physical system assisted by cloud and big data. IEEE Systems Journal, 2017, 11(1):88-95 doi: 10.1109/JSYST.2015.2460747 [11] Khan M U, Li S, Wang Q X, Shao Z L. CPS oriented control design for networked surveillance robots with multiple physical constraints. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 2016, 35(5):778-791 doi: 10.1109/TCAD.2016.2524653 [12] Higuera-Toledano M T, Risco-Martin J L, Arroba P, Ayala J L. Green adaptation of real-time web services for industrial CPS within a cloud environment. IEEE Transactions on Industrial Informatics, 2017, 13(3):1249-1256 doi: 10.1109/TII.2017.2693365 [13] Chai T Y, Wu Z W, Wang H. A CPS based optimal operational control system for fused magnesium furnace. IFAC-PapersOnLine, 2017, 50(1):14992-14999 doi: 10.1016/j.ifacol.2017.08.2566 [14] Pal R, Prasanna V. The STREAM mechanism for CPS security:the case of the smart grid. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 2017, 36(4):537-550 doi: 10.1109/TCAD.2016.2565201 [15] Wang K, Li X L. Multiple set-points tracking control based on online ADP. In: Proceedings of the 2016 Chinese Control and Decision Conference (CCDC). Yinchuan, China: IEEE, 2016. 1214-1219 [16] Zhang X, Zhang H G, Sun Q Y, Luo Y H. Adaptive dynamic programming-based optimal control of unknown nonaffine nonlinear discrete-time systems with proof of convergence. Neurocomputing, 2012, 91:48-55 doi: 10.1016/j.neucom.2012.01.025 [17] Wang K, Li X L, Jia C, Yang S X, Li M Q, Li Y. Multiobjective optimization of the production process for ground granulated blast furnace slags. Soft Computing, DOI: 10.1007/s00500-017-2761-x -

 下载:
下载:



计量
- 文章访问数: 2860
- HTML全文浏览量: 367
- PDF下载量: 489
- 被引次数: 0
