

Multilevel Peer-to-Peer Co-optimization for Cyber-physical Intelligent Energy Systems
-
摘要: 针对能源电力系统的优化管理与控制问题,提出了一种信息物理融合的智慧能源系统(Intelligent energy systems,IES)多级对等协同优化方法.在信息物理融合能源系统(Cyber-physical energy systems,CPES)的基础上,构建了智慧能源系统的局域和广域两级协同优化架构.综合考虑产消者能源实体对等交互过程中的社会福利、供求平衡和需求意愿等因素,基于Stone-Geary函数和双向拍卖机制构建了智慧能源系统能量优化模型,给出了通过收敛判定域引导的全局随机寻优与区域定向寻优策略,有效地提高了算法的局部搜索能力.此外,通过双向拍卖机制的理性定价以及智能合约的辅助服务,有效地实现了用户友好的对等交易模式.仿真实例表明,在社会福利最大化的前提下可获得产消者电力资源最优分配结果,进一步验证了本文方法的有效性和可行性.Abstract: A multilevel peer-to-peer co-optimization method for cyber-physical intelligent energy systems (IES) is proposed to analyze the optimal control and management problem of energy power systems. On the basis of the cyber-physical energy system (CPES), a co-optimization architecture of local and wide-area levels for intelligent energy system is constructed. With the help of Stone-Geary utility function and double auction mechanism, an energy optimization model for intelligent energy system is constructed in consideration of social welfare, supply-demand balance and demand willingness in the peer-to-peer interaction process of prosumers. At the same time, the local search ability of the intelligent optimization algorithm is further improved by the guidance of convergence judgment domain as well as the combination strategy of global random search and directional search. In addition, the user-friendly peer-to-peer trading mode is effectively realized through rational pricing of double auction mechanism and the auxiliary services of smart contract. Simulation results show that the optimal allocation of power resources can be obtained under the premise of maximizing social welfare, which further illustrates the effectiveness and feasibility of this method.1) 本文责任编委 王占山
-
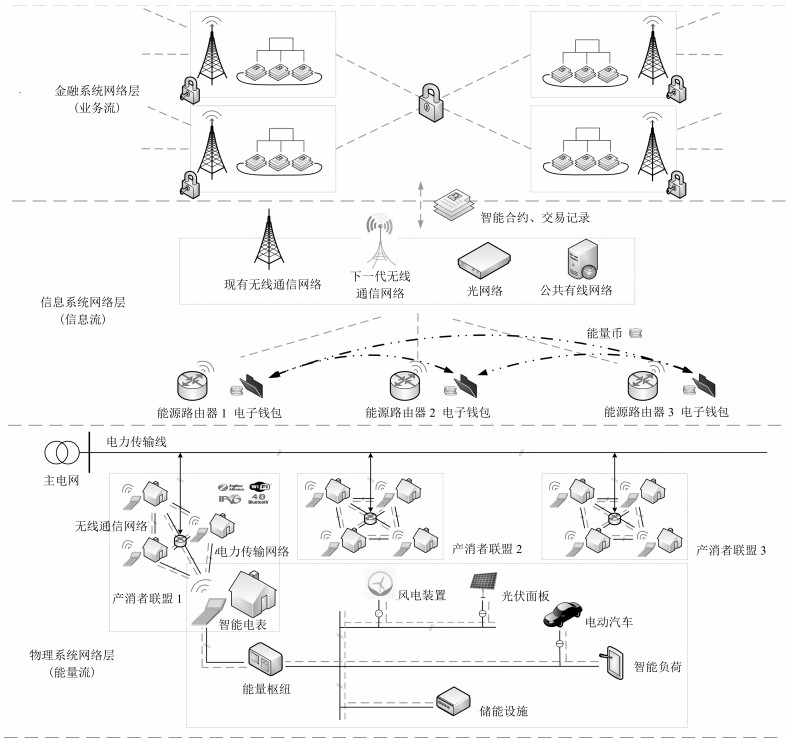
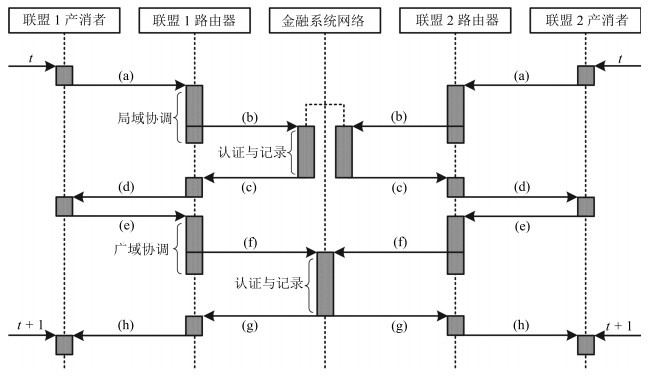
图 1 IES系统多级对等协同优化架构
Fig. 1 The architecture of multilevel peer-to-peer co-optimization in IES
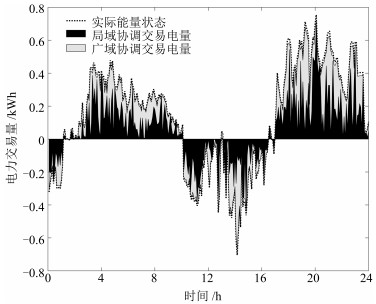
图 6 联盟1产消者3实时电力供求平衡
Fig. 6 Real-time supply and demand balance of 3rd prosumer in the first union
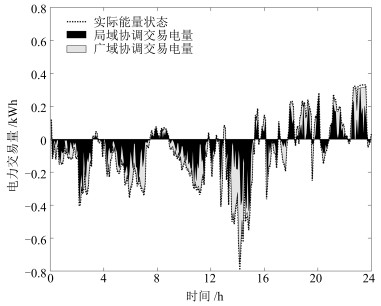
图 7 联盟2产消者10实时电力供求平衡
Fig. 7 Real-time supply and demand balance of 10th prosumer in the second union

图 8 联盟3产消者6实时电力供求平衡
Fig. 8 Real-time supply and demand balance of 6th prosumer in the third union
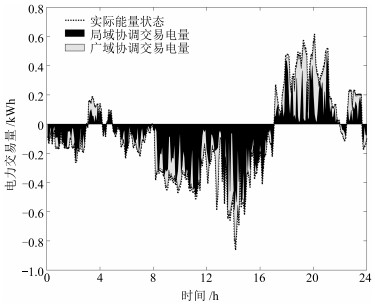
图 9 联盟4产消者14实时电力供求平衡
Fig. 9 Real-time supply and demand balance of 14th prosumer in the fourth union
表 1 优化模型相关参数
Table 1 The values of related parameters
参数 取值 $\eta$ 0.9 $l_{1}$ 0.01 $l_{2}$ 0.015 $\rho$ 0.8 $e_{1}$ 0.03 $e_{2}$ 0.045  下载: 导出CSV
下载: 导出CSV
表 2 不同控制参数下的迭代次数和计算时间
Table 2 The number of iterations and calculation time with different control parameters
$\varepsilon$ 迭代次数(次) 总计算时间(s) 0.8 20 483.46 0.6 15 369.90 0.4 11 281.34 0.2 8 162.64
下载: 导出CSV
表 3 联盟1产消者3某时段多级对等电力交易结果
Table 3 Multilevel peer-to-peer power trading results of the third prosumer node in the first union at a certain time
时段 偏差电量(kWh) 买方报价(元/kWh) 买方密封交易信息摘要 卖方 购买电量(kWh) 卖方收益(元) 买方支付(元) 3:15 0.457 0.348 eb45cc1d1c684ae290d373e18b260d95 联盟1产消者2 0.097 0.034 0.158 - - - a378420878294a04965be0a999054616 联盟1产消者11 0.082 0.029 - - - - d9f7bf9a2b054722913725c4335a802f 联盟2产消者5 0.144 0.050 - - - - e00a77da2c944828b304543a749562d3 联盟3产消者3 0.130 0.045 - 3:20 0.441 0.327 77298613587a49b5ae3d79a66b20b3f7 联盟1产消者4 0.002 0.001 0.144 - - - 0928c7e54bb04ab9a9405046982b1ece 联盟2产消者8 0.128 0.042 - - - - 836cdb97cb5c4eb5a10cde523126ce51 联盟3产消者13 0.201 0.065 - - - - 1b9ce86e11a0493a928491ae96ff1531 联盟4产消者7 0.110 0.036 - 3:25 0.385 0.296 700d192ebcc94008bf2834f13ebfe180 联盟1产消者6 0.084 0.025 0.114 - - - 1e25a82f6df84e13a0585f717800f703 联盟1产消者15 0.124 0.037 - - - - 5ceb8c3095014a7b90f43b8e977c8fd0 联盟3产消者9 0.092 0.027 - - - - 23d398b02ba14c84a585faf63aa05f39 联盟4产消者1 0.085 0.025 - 3:30 0.426 0.324 8bd98c74da514150914b09951289d1dd 联盟1产消者5 0.039 0.013 0.138 - - - 2c39321d56564099af552d0f605f7ece 联盟2产消者10 0.123 0.040 - - - - 84e0e44dd96e4957ae25c95c1668e7d2 联盟3产消者6 0.046 0.015 - - - - 75d10e745eb44602a352f65b3b5e084a 联盟4产消者6 0.218 0.070 - 3:35 0.377 0.291 e7318fc4dda44955ac1083961c703939 联盟1产消者12 0.090 0.026 0.110 - - - d2a7c521239b4afa9f078a7402c4b246 联盟1产消者7 0.059 0.017 - - - - 2a2cbf7036854a7bafcb34fbd868bea1 联盟1产消者4 0.081 0.024 - - - - b84c13d1b952407a9c1589d35d2d5ee4 联盟4产消者1 0.147 0.043 -
下载: 导出CSV
-
[1] Yu X H, Xue Y S.Smart grids:a cyber-physical systems perspective.Proceedings of the IEEE, 2016, 104(5):10581070 doi: 10.1109/JPROC.2015.2503119 [2] Xue Y S, Yu X H.Beyond smart grid-cyber-physical-social system in energy future (point of view).Proceedings of the IEEE, 2017, 105(12):2290-2292 doi: 10.1109/JPROC.2017.2768698 [3] 管晓宏, 赵千川, 贾庆山, 吴江, 刘烃.信息物理融合能源系统.北京:科学出版社, 2016.Guan Xiao-Hong, Zhao Qian-Chuan, Jia Qing-Shan, Wu Jiang, Liu Ting.Cyber-Physical Energy Systems.Beijing:Science Press, 2016. [4] 杨新法, 苏剑, 吕志鹏, 刘海涛, 李蕊.微电网技术综述.中国电机工程学报, 2014, 34(1):57-70 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201401008Yang Xin-Fa, Su Jian, Lv Zhi-Peng, Liu Hai-Tao, Li Rui.Overview on micro-grid technology.Proceedings of the CSEE, 2014, 34(1):57-70 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201401008 [5] Wu Y, Tan X Q, Qian L P, Tsang D H K, Song W Z, Yu L.Optimal pricing and energy scheduling for hybrid energy trading market in future smart grid.IEEE Transactions on Industrial Informatics, 2015, 11(6):1585-1596 doi: 10.1109/TII.2015.2426052 [6] Farraj A, Hammad E, Deepa K.A cyber-physical control framework for transient stability in smart grid.IEEE Transactions on Smart Grid, 2018, 9(2):1205-1215 doi: 10.1109/TSG.2016.2581588 [7] 王毅, 张宁, 康重庆.能源互联网中能量枢纽的优化规划与运行研究综述及展望.中国电机工程学报, 2015, 35(22):5669-5681 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201522001Wang Yi, Zhang Ning, Kang Chong-Qing.Review and prospect of optimal planning and operation of energy hub in energy internet.Proceedings of the CSEE, 2015, 35(22):5669-5681 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201522001 [8] Zhang H G, Li Y S, Gao D W, Zhou G J.Distributed optimal energy management for energy internet.IEEE Transactions on Industrial Informatics, 2017, 13(6):3081-3097 doi: 10.1109/TII.2017.2714199 [9] 孙秋野, 滕菲, 张化光.能源互联网及其关键控制问题.自动化学报, 2017, 43(2):176-194 http://www.aas.net.cn/CN/abstract/abstract18999.shtmlSun Qiu-Ye, Teng Fei, Zhang Hua-Guang.Energy internet and its key control issues.Acta Automatica Sinica, 2017, 43(2):176-194 http://www.aas.net.cn/CN/abstract/abstract18999.shtml [10] Zhang J J, Gao D W, Zhang Y C, Wang X, Zhao X Y, Duan D L, et al.Social energy:mining energy from the society.IEEE/CAA Journal of Automatica Sinica, 2017, 4(3):466482 doi: 10.1109/JAS.2017.7510547 [11] 邓建玲, 王飞跃, 陈耀斌, 赵向阳.从工业4.0到能源5.0:智能能源系统的概念、内涵及体系框架.自动化学报, 2015, 41(12):2003-2016 http://www.aas.net.cn/CN/abstract/abstract18774.shtmlDeng Jian-Ling, Wang Fei-Yue, Chen Yao-Bin, Zhao Xiang-Yang.From industries 4.0 to energy 5.0:concept and framework of intelligent energy systems.Acta Automatica Sinica, 2015, 41(12):2003-2016 http://www.aas.net.cn/CN/abstract/abstract18774.shtml [12] Vrba P, Mařík V, Siano P, Leitão P, Zhabelova G, Vyatkin V, et al.A review of agent and service-oriented concepts applied to intelligent energy systems.IEEE Transactions on Industrial Informatics, 2014, 10(3):1890-1903 doi: 10.1109/TII.2014.2326411 [13] Palensky P, Widl E, Stifter M, Elsheikh A.Modeling intelligent energy systems:co-simulation platform for validating flexible-demand EV charging management.IEEE Transactions on Smart Grid, 2013, 4(4):1939-1947 doi: 10.1109/TSG.2013.2258050 [14] 程乐峰, 余涛, 张孝顺, 殷林飞, 瞿凯平.信息-物理-社会融合的智慧能源调度机器人及其知识自动化:框架、技术与挑战.中国电机工程学报, 2018, 38(1):25-40 http://www.cnki.com.cn/Article/CJFDTotal-ZGDC201801003.htmCheng Le-Feng, Yu Tao, Zhang Xiao-Shun, Yin Lin-Fei, Qu Kai-Ping.Cyber-physical-social systems based smart energy robotic dispatcher and its knowledge automation:framework, techniques and challenges.Proceedings of the CSEE, 2018, 38(1):25-40 http://www.cnki.com.cn/Article/CJFDTotal-ZGDC201801003.htm [15] Roche R, Blunier B, Miraoui A, Hilaire V, Koukam A.Multi-agent systems for grid energy management:a short review.In:Proceedings of the 36th Annual Conference on IEEE Industrial Electronics Society.Glendale, USA:IEEE, 2010.3341-3346 [16] Duan R, Deconinck G.Future electricity market interoperability of a multi-agent model of the smart grid.In:Proceedings of the 2010 International Conference on Networking, Sensing and Control (ICNSC).Chicago, USA:IEEE, 2010.625-630 [17] Vergados D J, Mamounakis I, Makris P, Varvarigos E.Prosumer clustering into virtual microgrids for cost reduction in renewable energy trading markets.Sustainable Energy, Grids and Networks, 2016, 7:90-103 doi: 10.1016/j.segan.2016.06.002 [18] Marzband M, Javadi M, Domínguez-García J L, Moghaddam M M.Non-cooperative game theory based energy management systems for energy district in the retail market considering DER uncertainties.IET Generation, Transmission and Distribution, 2016, 10(12):2999-3009 doi: 10.1049/iet-gtd.2016.0024 [19] Di Battista G, Di Donato V, Patrignani M, Pizzonia M, Roselli V, Tamassia R.Bitconeview:visualization of flows in the Bitcoin transaction graph.In:Proceedings of the 2015 IEEE Symposium on Visualization for Cyber Security.Chicago, USA:IEEE, 2015.1-8 [20] Nguyen Q K.Blockchain-a financial technology for future sustainable development.In:Proceedings of the 3rd International Conference on Green Technology and Sustainable Development.Taiwan, China:IEEE, 2016.51-54 [21] 张宁, 王毅, 康重庆, 程将南, 贺大玮.能源互联网中的区块链技术:研究框架与典型应用初探.中国电机工程学报, 2016, 36(15):4011-4022 http://d.old.wanfangdata.com.cn/Periodical/shjn201803002Zhang Ning, Wang Yi, Kang Chong-Qing, Cheng Jiang-Nan, He Da-Wei.Blockchain technique in the energy internet:preliminary research framework and typical applications.Proceedings of the CSEE, 2016, 36(15):4011-4022 http://d.old.wanfangdata.com.cn/Periodical/shjn201803002 [22] 平健, 陈思捷, 张宁, 严正, 姚良忠.基于智能合约的配电网去中心化交易机制.中国电机工程学报, 2017, 37(13):3682-3690 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201713004.htmPing Jian, Chen Si-Jie, Zhang Ning, Yan Zheng, Yao Liang-Zhong.Decentralized transactive mechanism in distribution network based on smart contract.Proceedings of the CSEE, 2017, 37(13):3682-3690 http://www.cnki.com.cn/Article/CJFDTOTAL-ZGDC201713004.htm [23] 孙秋野, 赵美伊, 陈月, 马大中.能源互联网多能源系统最优功率流.中国电机工程学报, 2017, 37(6):1590-1598 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20172017042100215298Sun Qiu-Ye, Zhao Mei-Yi, Chen Yue, Ma Da-Zhong.Optimal energy flow of multiple energy systems in energy internet.Proceedings of the CSEE, 2017, 37(6):1590-1598 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20172017042100215298 [24] Sun Q Y, Han R K, Zhang H G, Zhou J G, Guerrero J M.A multiagent-based consensus algorithm for distributed coordinated control of distributed generators in the energy internet.IEEE Transactions on Smart Grid, 2015, 6(6):30063019 doi: 10.1109/TSG.2015.2412779 [25] Di Giorgio A, Liberati F.Near real time load shifting control for residential electricity prosumers under designed and market indexed pricing models.Applied Energy, 2014, 128:119-132 doi: 10.1016/j.apenergy.2014.04.032 [26] Zhang C H, Wu J Z, Zhou Y, Cheng M, Long C.Peer-to-Peer energy trading in a microgrid.Applied Energy, 2018, 220:1-12 doi: 10.1016/j.apenergy.2018.03.010 [27] 王永福, 张伯明, 孙宏斌, 夏清, 黄永皓, 孟远景, 等.基于内点法的实时平衡交易算法.电网技术, 2004, 28(1):48-50, 55 doi: 10.3321/j.issn:1000-3673.2004.01.012Wang Yong-Fu, Zhang Bo-Ming, Sun Hong-Bin, Xia Qing, Huang Yong-Hao, Meng Yuan-Jing, et al.A new method for balancing trade based on interior-point algorithm.Power System Technology, 2004, 28(1):48-50, 55 doi: 10.3321/j.issn:1000-3673.2004.01.012 [28] 王魁, 张步涵, 周杨, 李俊芳.基于混沌量子粒子群算法的含风电场电力系统实时调度.电力系统自动化, 2011, 35(22):141-146 http://d.old.wanfangdata.com.cn/Periodical/dlxtzdh201122028Wang Kui, Zhang Bu-Han, Zhou Yang, Li Jun-Fang.Real-time dispatch in wind power integrated system based on choas quantum-behaved particle swarm optimization.Automation of Electric Power Systems, 2011, 35(22):141-146 http://d.old.wanfangdata.com.cn/Periodical/dlxtzdh201122028 [29] Chen J Y, Wang J, Chen Q, Wu D.Optimal dispatch of medium-voltage microgrid using an adaptive PSO algorithm.In:Proceedings of the 7th International Conference on Intelligent Human-Machine Systems and Cybernetics.Hangzhou, China:IEEE, 2015.324-329 [30] Li Y L, Shao W, You L, Wang B Z.An improved PSO algorithm and its application to UWB antenna design.IEEE Antennas and Wireless Propagation Letters, 2013, 12:12361239 doi: 10.1109/LAWP.2013.2283375 [31] 王飞跃, 王晓, 袁勇, 王涛, 林懿伦.社会计算与计算社会:智慧社会的基础与必然.科学通报, 2015, 60(5-6):460-469 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx200404002Wang Fei-Yue, Wang Xiao, Yuan Yong, Wang Tao, Lin Yi-Lun.Social computing and computational societies:the foundation and consequence of smart societies.Chinese Science Bulletin, 2015, 60(5-6):460-469 http://d.old.wanfangdata.com.cn/Periodical/fzxtyfzxkx200404002 [32] 孙秋野, 王冰玉, 黄博南, 马大中.狭义能源互联网优化控制框架及实现.中国电机工程学报, 2015, 35(18):4571-4580 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201518002Sun Qiu-Ye, Wang Bing-Yu, Huang Bo-Nan, Ma Da-Zhong.The optimization control and implementation for the special energy internet.Proceedings of the CSEE, 2015, 35(18):4571-4580 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201518002 [33] 孙秋野.能源互联网.北京:科学出版社, 2015.Sun Qiu-Ye.The Energy Internet.Beijing:Science Press, 2015. [34] 王飞跃.平行控制:数据驱动的计算控制方法.自动化学报, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtmlWang Fei-Yue.Parallel control:a method for data-driven and computational control.Acta Automatica Sinica, 2013, 39(4):293-302 http://www.aas.net.cn/CN/abstract/abstract17915.shtml [35] 张俊, 高文忠, 张应晨, 郑心湖, 杨柳青, 郝君, 等.运行于区块链上的智能分布式电力能源系统:需求、概念、方法以及展望.自动化学报, 2017, 43(9):1544-1554 http://www.aas.net.cn/CN/abstract/abstract19130.shtmlZhang Jun, Gao Wen-Zhong, Zhang Ying-Chen, Zheng Xin-Hu, Yang Liu-Qing, Hao Jun, et al.Blockchain based intelligent distributed electrical energy systems:needs, concepts, approaches and vision.Acta Automatica Sinica, 2017, 43(9):1544-1554 http://www.aas.net.cn/CN/abstract/abstract19130.shtml [36] Cheng S, Zeng B, Huang Y Z.Research on application model of blockchain technology in distributed electricity market.In:Proceedings of the 2nd International Conference on New Energy and Future Energy System (NEFES).Kunming, China:IOP Publishing Ltd, 2017.1-11 [37] Geary R C.A note on "a constant-utility index of the cost of living".The Review of Economic Studies, 1950, 18(1):65-66 doi: 10.2307/2296107 [38] 项顶, 宋永华, 胡泽春, 徐智威.电动汽车参与V2G的最优峰谷电价研究.中国电机工程学报, 2013, 33(31):15-25 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201331030Xiang Ding, Song Yong-Hua, Hu Ze-Chun, Xu Zhi-Wei.Research on optimal time of use price for electric vehicle participating V2G.Proceedings of the CSEE, 2013, 33(31):1525 http://d.old.wanfangdata.com.cn/Periodical/zgdjgcxb201331030 [39] Friedman D, Rust J.The Double Auction Market:Institutions, Theories and Evidence.Boulder, CO, USA:Westview Press, 1993. [40] Iosifidis G, Koutsopoulos I.Double auction mechanisms for resource allocation in autonomous networks.IEEE Journal on Selected Areas in Communications, 2010, 28(1):95-102 doi: 10.1109/JSAC.2010.100110 -

 下载:
下载:


计量
- 文章访问数: 3715
- HTML全文浏览量: 481
- PDF下载量: 946
- 被引次数: 0
