

-
摘要: 信息物理系统(Cyber-physical system,CPS)将计算、通信与控制技术紧密结合,实现了计算资源与物理资源的结合与协调.CPS是当前自动化领域的前沿研究方向,已经引起了学术界和工业界的广泛关注.本文对CPS进行了简要介绍,根据技术的应用特点对CPS的现有研究成果进行了分类,综述了各个研究方向的意义和研究进展,给出了CPS的两个典型实际案例,探讨了CPS研究中亟待解决的问题以及未来可能的研究方向.
-
关键词:
- 信息物理系统 /
- 技术综述 /
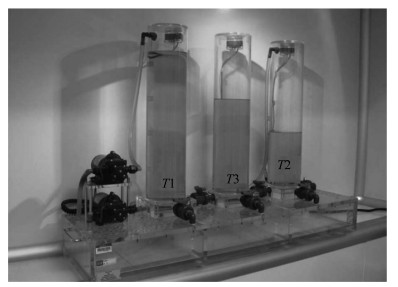
- 网络化三容水箱系统 /
- 智能船舶运行与维护系统
Abstract: Cyber-physical systems (CPSs) closely combine computing, communication and control technologies, realizing the integration and coordination of computing resources and physical resources. The research on CPSs is a hotspot in the field of automation, which has attracted wide attention from academia and industry. We briefly introduce CPSs in the beginning of this paper. Then we categorize CPS' existing research achievements according to their technological application characteristics and review their significance as well as recent progress. Two practical systems are described to better demonstrate the characteristics of CPSs. Finally, we conclude this paper and point out several future research directions.1) 本文责任编委 程龙 -
[1] 信息物理系统白皮书.中国电子技术标准化研究院, [Online], available: http://www.cesi.cn/201703/2251.html, 2018年9月21日White Paper: Cyber-Physical System. China Electronics Standardization Institute, [Online], available: http://www.cesi.cn/201703/2251.html, September 21, 2018 [2] 李杰, 邱伯华, 刘宗长, 魏慕恒. CPS:新一代工业智能.上海:上海交通大学出版社, 2017.Lee J, Qiu Bo-Hua, Liu Zong-Chang, Wei Mu-Heng. Cyber-Physical System:The New Generation of Industrial Intelligence. Shanghai:Shanghai Jiao Tong University Press, 2017. [3] 邢黎闻.孙优贤院士论工业信息物理融合系统.信息化建设, 2018, (1):10-11 http://www.cnki.com.cn/Article/CJFDTotal-XXJS201801004.htmXing Li-Wen. A report from academician You-Xian Sun on industrial cyber physics fusion systems. Informatization Construction, 2018, (1):10-11 http://www.cnki.com.cn/Article/CJFDTotal-XXJS201801004.htm [4] 温景容, 武穆清, 宿景芳.信息物理融合系统.自动化学报, 2012, 38(4):507-517 http://www.aas.net.cn/CN/abstract/abstract17704.shtmlWen Jing-Rong, Wu Mu-Qing, Su Jing-Fang. Cyber-physical system. Acta Automatica Sinica, 2012, 38(4):507-517 http://www.aas.net.cn/CN/abstract/abstract17704.shtml [5] 黎作鹏, 张天驰, 张菁.信息物理融合系统(CPS)研究综述.计算机科学, 2011, 38(9):25-31 doi: 10.3969/j.issn.1002-137X.2011.09.005Li Zuo-Peng, Zhang Tian-Chi, Zhang Jing. Survey on the research of cyber-physical systems (CPS). Computer Science, 2011, 38(9):25-31 doi: 10.3969/j.issn.1002-137X.2011.09.005 [6] Guo A, Yu D, Hu Y, Wang S, An T, Zhang T F. Design and implementation of data collection system based on CPS model. In: Proceedings of the 2015 International Conference on Computer Science and Mechanical Automation (CSMA). Hangzhou, China: IEEE, 2015. 139-143 https://ieeexplore.ieee.org/document/7371638/ [7] Iri N, Yu L, Shen H Y, Caulfield G. Congestion-adaptive data collection with accuracy guarantee in cyber-physical systems. In: Proceedings of the 12th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON). Seattle, WA, USA: IEEE, 2015. 82-90 https://ieeexplore.ieee.org/document/7338294 [8] Huang W Q, Dai W B, Wang P, Vyatkin V. Real-time data acquisition support for IEC 61499 based industrial cyber-physical systems. In: Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society (IECON). Beijing, China: IEEE, 2017. 6689-6694 [9] 齐超, 何勇.基于CPS的数据采集系统设计.计算机系统应用, 2010, 19(6):5-8 doi: 10.3969/j.issn.1003-3254.2010.06.002Qi Chao, He Yong. Design of data collection system based on CPS. Computer Systems and Applications, 2010, 19(6):5-8 doi: 10.3969/j.issn.1003-3254.2010.06.002 [10] Kuo S Y, Chou Y H, Chen C Y. Quantum-inspired algorithm for cyber-physical visual surveillance deployment systems. Computer Networks, 2017, 117:5-18 doi: 10.1016/j.comnet.2016.11.013 [11] Wang H, Li J Z, Gao H. Minimized cost gateway deployment in cyber-physical systems. International Journal of Distributed Sensor Networks, 2015, 2015(9):Article No. 28 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Doaj000003917695 [12] Kim Y H, Kim C M, Han Y H, Jeong Y S, Park D S. An efficient strategy of nonuniform sensor deployment in cyber physical systems. The Journal of Supercomputing, 2013, 66(1):70-80 doi: 10.1007/s11227-013-0977-9 [13] Liu J, Kou T Y, Chen Q, Sherali H D. On wireless network infrastructure optimisation for cyber-physical systems in future smart buildings. International Journal of Sensor Networks, 2015, 18(3-4):148-160 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=93cfb3991706a7137e525bd2ea71ce54 [14] 蒋俊, 黄传河, 华超, 胡海桥, 彭晖.基于软件定义资源的实时控制CPS数据传输机制.计算机工程与科学, 2015, 37(12):2250-2255 doi: 10.3969/j.issn.1007-130X.2015.12.009Jiang Jun, Huang Chuan-He, Hua Chao, Hu Hai-Qiao, Peng Hui. Data transmission scheme of real-time control CPS based on software defined resources. Computer Engineering and Science, 2015, 37(12):2250-2255 doi: 10.3969/j.issn.1007-130X.2015.12.009 [15] Liu K, Lee V C S, Ng J K Y, Son S H, Sha E H M. Scheduling temporal data with dynamic snapshot consistency requirement in vehicular cyber-physical systems. ACM Transactions on Embedded Computing Systems, 2014, 13(5S):Article No. 163 https://dl.acm.org/citation.cfm?id=2629546 [16] Xia F, Wang L Q, Zhang D Q, He D J, Kong X J. An adaptive MAC protocol for real-time and reliable communications in medical cyber-physical systems. Telecommunication Systems, 2015, 58(2):125-138 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=48f8311b9ea23dee9961f88c4283c747 [17] You M L, Liu Q T, Sun H J. New communication strategy for spectrum sharing enabled smart grid cyber-physical system. IET Cyber-Physical Systems:Theory and Applications, 2017, 2(3):136-142 https://ieeexplore.ieee.org/document/8104002/ [18] Nguyen N T, Leu M C, Liu X Q F. Real-time communication for manufacturing cyber-physical systems. In: Proceedings of the 16th IEEE International Symposium on Network Computing and Applications (NCA). Cambridge, MA, USA: IEEE, 2017. 241-244 https://www.computer.org/csdl/proceedings/nca/2017/1465/00/08171361-abs.html [19] Lazaro C, Oruklu E, Cinar A. Cyber-physical platform development for multivariable artificial pancreas systems. International Journal of Handheld Computing Research, 2015, 6(3):1-16 doi: 10.4018/IJHCR [20] Ma M M, An J Y, Huang Z, Cao Z B. Sensor data fusion based on an improved dempaster-shafer evidence theory in vehicular cyber-physical systems. In: Proceedings of the 2015 IEEE International Symposium on Intelligent Control (ISIC). Sydney, Australia: IEEE, 2015. 683-687 [21] 彭宇, 罗清华, 彭喜元.网络化测试体系中不确定性数据处理方法浅析.仪器仪表学报, 2010, 31(1):229-240 http://d.old.wanfangdata.com.cn/Periodical/yqyb201001040Peng Yu, Luo Qing-Hua, Peng Xi-Yuan. Analysis of uncertain data processing methods in networking test framework. Chinese Journal of Scientific Instrument, 2010, 31(1):229-240 http://d.old.wanfangdata.com.cn/Periodical/yqyb201001040 [22] Fitzgerald J, Gamble C, Payne R, Larsen P G, Basagiannis S, Mady A E D. Collaborative model-based systems engineering for cyber-physical systems, with a building automation case study. INCOSE International Symposium, 2016, 26(1):817-832 doi: 10.1002/j.2334-5837.2016.00195.x [23] Larsen P G, Fitzgerald J, Woodcock J, Nilsson R, Gamble C, Foster S. Towards semantically integrated models and tools for cyber-physical systems design. In: Proceedings of the 7th International Symposium on Leveraging Applications of Formal Methods, Verification and Validation. Corfu, Greece: Springer, 2016. 171-186 doi: 10.1007%2F978-3-319-47169-3_13 [24] Wang B B, Baras J S. HybridSim: a modeling and co-simulation toolchain for cyber-physical systems. In: Proceedings of the 17th IEEE/ACM International Symposium on Distributed Simulation and Real Time Applications. Delft, Netherlands: IEEE, 2013. 33-40 https://ieeexplore.ieee.org/document/6690491 [25] Derler P, Lee E A, Vincentelli A S. Modeling cyber-physical systems. Proceedings of the IEEE, 2012, 100(1):13-28 http://d.old.wanfangdata.com.cn/Periodical/dlxtzdh201116001 [26] Wan J, Canedo A, Faruque M A A. Cyber-physical codesign at the functional level for multidomain automotive systems. IEEE Systems Journal, 2017, 11(4):2949-2959 https://ieeexplore.ieee.org/document/7293612 [27] Vatanparvar K, Faezi S, Burago I, Levorato M, Faruque M A A. Extended range electric vehicle with driving behavior estimation in energy management. IEEE Transactions on Smart Grid, 2018, DOI: 10.1109/TSG.2018.2815689 [28] Sun Z, Ou G, Dyke S J, Lu C. A state estimation method for wireless structural control systems. Structural Control and Health Monitoring, 2017, 24(6):Article No. e1929 doi: 10.1002/stc.1929 [29] Savas A J, Srivastava V, Leonard N E. On distributed linear filtering with noisy communication. In: Proceedings of the 2017 American Control Conference (ACC). Seattle, WA, USA: IEEE, 2017. 2699-2704 [30] Shoukry Y, Nuzzo P, Puggelli A, Sangiovanni-Vincentelli A L, Seshia S A, Tabuada P. Secure state estimation for cyber-physical systems under sensor attacks:a satisfiability modulo theory approach. IEEE Transactions on Automatic Control, 2017, 62(10):4917-4932 doi: 10.1109/TAC.2017.2676679 [31] Mishra S, Shoukry Y, Karamchandani N, Diggavi S N, Tabuada P. Secure state estimation against sensor attacks in the presence of noise. IEEE Transactions on Control of Network Systems, 2017, 4(1):49-59 https://ieeexplore.ieee.org/document/7562377 [32] Shoukry Y, Tabuada P. Event-triggered state observers for sparse sensor noise/attacks. IEEE Transactions on Automatic Control, 2016, 61(8):2079-2091 doi: 10.1109/TAC.2015.2492159 [33] Sun Z X, Krishnan S, Hackmann G, Yan G R, Dyke S J, Lu C Y, et al. Damage detection on a full-scale highway sign structure with a distributed wireless sensor network. Smart Structures and Systems, 2015, 16(1):223-242 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JAKO201523047607134 [34] Reppa V, Polycarpou M M, Panayiotou C G. Distributed sensor fault diagnosis for a network of interconnected cyberphysical systems. IEEE Transactions on Control of Network Systems, 2015, 2(1):11-23 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fbbe2bcac5456010f7f61c22d89f6c63 [35] Lokhov A Y, Lemons N, McAndrew T C, Hagberg A, Backhaus S. Detection of cyber-physical faults and intrusions from physical correlations. In: Proceedings of the 16th IEEE International Conference on Data Mining (ICDM). Barcelona, Spain: IEEE, 2016. 303-310 [36] Payne R, Fitzgerald J, Bryans J, Winthorpe E. Applying model-based SE techniques for dependable land systems. INCOSE International Symposium, 2016, 26(1):1783-1798 doi: 10.1002/iis2.2016.26.issue-1 [37] Rungger M, Tabuada P. A notion of robustness for cyber-physical systems. IEEE Transactions on Automatic Control, 2016, 61(8):2108-2123 doi: 10.1109/TAC.2015.2492438 [38] Jackson M, Fitzgerald J S. Resilience profiling in the model-based design of cyber-physical systems. In: Proceedings of the 14th Overture Workshop on Towards Analytical Tool Chains. Limassol, Cyprus: Aarhus University Department of Engineering, 2016. 1-16 [39] De Persis C, Postoyan R. A Lyapunov redesign of coordination algorithms for cyber-physical systems. IEEE Transactions on Automatic Control, 2017, 62(2):808-823 doi: 10.1109/TAC.2016.2565062 [40] Dinh S, Li J, Agrawal K, Gill C, Lu C Y. Blocking analysis for spin locks in real-time parallel tasks. IEEE Transactions on Parallel and Distributed Systems, 2018, 29(4):789-802 https://ieeexplore.ieee.org/document/8122044 [41] Lee H, Faruque M A A. Run-time scheduling framework for event-driven applications on a GPU-based embedded system. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 2016, 35(12):1956-1967 doi: 10.1109/TCAD.2016.2547916 [42] Quintas J, Menezes P, Dias J. Information model and architecture specification for context awareness interaction decision support in cyber-physical human-machine systems. IEEE Transactions on Human-Machine Systems, 2017, 47(3):323-331 doi: 10.1109/THMS.2016.2634923 [43] Wang F F, Ju F, Lu Y. A study on performance evaluation and status-based decision for cyber-physical production systems. In: Proceedings of the 13th IEEE Conference on Automation Science and Engineering (CASE). Xi'an, China: IEEE, 2017. 1000-1005 https://ieeexplore.ieee.org/document/8256233 [44] Vatanparvar K, Fakhouri S, Siddika M A, Faruque M A A. Compartmentalisation-based design automation method for power grid. IET Cyber-Physical Systems:Theory and Applications, 2017, 2(1):20-27 https://ieeexplore.ieee.org/document/7898558 [45] Ma Y H, Gunatilaka D, Li B, Gonzalez H, Lu C Y. Holistic cyber-physical management for dependable wireless control systems. ACM Transactions on Cyber-Physical Systems, 2018, 3(1):Article No. 3 https://arxiv.org/abs/1705.01862 [46] Ames A D, Xu X R, Grizzle J W, Tabuada P. Control barrier function based quadratic programs for safety critical systems. IEEE Transactions on Automatic Control, 2017, 62(8):3861-3876 doi: 10.1109/TAC.2016.2638961 [47] Buini H M, Peter S, Givargis T. Adaptive embedded control of cyber-physical systems using reinforcement learning. IET Cyber-Physical Systems:Theory and Applications, 2017, 2(3):127-135 https://ieeexplore.ieee.org/document/8103981 [48] Xu J, Haddad W M, Hayakawa T. An adaptive control architecture for cyber-physical system security in the face of sensor and actuator attacks and exogenous stochastic disturbances. In: Proceedings of the 56th Annual Conference on Decision and Control (CDC). Melbourne, Australia: IEEE, 2017. 1380-1385 https://ieeexplore.ieee.org/document/8263847 [49] An L W, Yang G H. Decentralized adaptive fuzzy secure control for nonlinear uncertain interconnected systems against intermittent DoS attacks. IEEE Transactions on Cybernetics, 2018, DOI: 10.1109/TCYB.2017.2787740 [50] Song Y D, Huang X C, Wen C Y. Robust adaptive fault-tolerant PID control of MIMO nonlinear systems with unknown control direction. IEEE Transactions on Industrial Electronics, 2017, 64(6):4876-4884 doi: 10.1109/TIE.2017.2669891 [51] Cheng S T, Chou J H. Fuzzy-based actuators controlling for minimizing power consumption in cyber-physical system. In: Proceedings of the 26th IEEE International Conference on Advanced Information Networking and Applications. Fukuoka City, Japan: IEEE, 2012. 160-166 https://ieeexplore.ieee.org/document/6184866 [52] Garcia C A, Castellanos E X, Buele J, Espinoza J, Beltrán C, Pilatasig M, et al. Fuzzy control implementation in low cost CPPS devices. In: Proceedings of the 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI). Daegu, South Korea: IEEE, 2017. 162-167 [53] Carni D, Grimaldi D, Nigro L, Sciammarella P F, Cicirelli F. Agent-based software architecture for distributed measurement systems and cyber-physical systems design. In: Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC). Torino, Italy: IEEE, 2017. 1898-1903 https://ieeexplore.ieee.org/document/7969977 [54] Engelsberger M, Greiner T. Software architecture for cyber-physical control systems with flexible application of the software-as-a-service and on-premises model. In: Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT). Seville, Spain: IEEE, 2015. 1544-1549 https://ieeexplore.ieee.org/document/7125316 [55] Kim J H, Lee S H, Kim W T, Park S M. Data transport block structure design in CPS middleware subsystem. In: Proceedings of the 2010 International Conference on Information and Communication Technology Convergence (ICTC). Jeju, South Korea: IEEE, 2010. 427-428 https://ieeexplore.ieee.org/document/5674808 [56] Dabholkar A, Gokhale A. An approach to middleware specialization for cyber physical systems. In: Proceedings of the 29th IEEE International Conference on Distributed Computing Systems Workshops. Montreal, Canada: IEEE, 2009. 73-79 https://ieeexplore.ieee.org/document/5158836 [57] Reijers N, Wang Y C, Shih C S, Hsu J Y, Lin K J. Building intelligent middleware for large scale CPS systems. In: Proceedings of the 2011 IEEE International Conference on Service-Oriented Computing and Applications (SOCA). Irvine, CA, USA: IEEE, 2011. 1-4 https://ieeexplore.ieee.org/document/6166238 [58] Huang J, Bastani F, Yen I L, Dong J, Zhang W, Wang F J, et al. Extending service model to build an effective service composition framework for cyber-physical systems. In: Proceedings of the 2009 IEEE International Conference on Service-Oriented Computing and Applications (SOCA). Taipei, China: IEEE, 2009. 1-8 https://ieeexplore.ieee.org/document/5410453 [59] Feljan A V, Mohalik S K, Jayaraman M B, Badrinath R. SOA-PE: a service-oriented architecture for planning and execution in cyber-physical systems. In: Proceedings of the 2015 International Conference on Smart Sensors and Systems (IC-SSS). Bangalore, India: IEEE, 2015. 1-6 https://ieeexplore.ieee.org/document/7873602 [60] Yen I L, Zhu W, Bastani F, Huang Y T, Zhou G. Rapid service composition reasoning for agile cyber physical systems. In: Proceedings of the 10th IEEE International Symposium on Service-Oriented System Engineering (SOSE). Oxford, England: IEEE, 2016. 442-449 https://ieeexplore.ieee.org/document/7473059 [61] Wang T, Niu C L, Cheng L L. A two-phase context-sensitive service composition method with the workflow model in cyber-physical systems. In: Proceedings of the 17th IEEE International Conference on Computational Science and Engineering. Chengdu, China: IEEE, 2014. 1475-1482 https://ieeexplore.ieee.org/document/7023786 [62] Li F F, Liu C, Yu G, Chen Z. A scheduling algorithm of events with uncertain timestamps for CPS. In: Proceedings of the 3rd International Conference on Big Data Computing and Communications (BIGCOM). Chengdu, China: IEEE, 2017. 313-319 https://www.infona.pl/resource/bwmeta1.element.ieee-art-000008113083 [63] Chejerla B K, Madria S. Information fusion architecture for variable-load scheduling in a cloud-assisted CPS. In: Proceedings of the 2nd IEEE International Conference on Collaboration and Internet Computing (CIC). Pittsburgh, PA, USA: IEEE, 2016. 178-187 https://ieeexplore.ieee.org/abstract/document/7809705/ [64] Zhou B H, Yu M, Liu T. A mixed parameter scheduling algorithm of node operating system in CPS. In: Proceedings of the 12th World Congress on Intelligent Control and Automation (WCICA). Guilin, China: IEEE, 2016. 2980-2985 https://ieeexplore.ieee.org/document/7578492 [65] Zhou B H, Yao Y, Mao H Y, Yao D P, Xu L B. Research on optimal ELSF real-time scheduling algorithm for CPS. In: Proceedings of the 28th Chinese Control and Decision Conference (CCDC). Yinchuan, China: IEEE, 2016. 6867-6871 https://ieeexplore.ieee.org/document/7532235 [66] Schneider R, Goswami D, Masrur A, Chakraborty S. QoC-oriented efficient schedule synthesis for mixed-criticality cyber-physical systems. In: Proceedings of the 2012 Forum on Specification and Design Languages. Vienna, Austria: IEEE, 2012. 60-67 https://ieeexplore.ieee.org/document/6336986 [67] Zhang J, Yang X D, Fan H B. An improved real-time task preemptive scheduling in cyber-physical systems. In: Proceedings of the 29th Chinese Control and Decision Conference (CCDC). Chongqing, China: IEEE, 2017. 5843-5848 https://ieeexplore.ieee.org/document/7978213 [68] 伦永亮, 程良伦.一种基于反馈的CPS上层资源动态分配与优化调度策略.科技通报, 2012, 28(12):128-130 doi: 10.3969/j.issn.1001-7119.2012.12.044Lun Yong-Liang, Cheng Liang-Lun. A kind of the upper resources based on feedback CPS dynamic allocation and optimization scheduling strategy. Bulletin of Science and Technology, 2012, 28(12):128-130 doi: 10.3969/j.issn.1001-7119.2012.12.044 [69] 韩杰, 马斌, 黄宽, 王长涛, 魏威.基于蚁群算法的分布式CPS系统任务调度设计.测控技术, 2015, 34(2):121-124 doi: 10.3969/j.issn.1000-8829.2015.02.033Han Jie, Ma Bin, Huang Kuan, Wang Chang-Tao, Wei Wei. Design of distributed CPS system task scheduling based on ant colony algorithm. Measurement and Control Technology, 2015, 34(2):121-124 doi: 10.3969/j.issn.1000-8829.2015.02.033 [70] Yang T T, Feng H L, Zhao J, Deng R L, Wang Y, Su Z. Genetic optimization-based scheduling in maritime cyber physical systems. International Journal of Distributed Sensor Networks, 2017, 13(7):1-10 [71] Gong H F, Li R F, An J Y, Chen W W, Li K Q. Scheduling algorithms of flat semi-dormant multicontrollers for a cyber-physical system. IEEE Transactions on Industrial Informatics, 2017, 13(4):1665-1680 doi: 10.1109/TII.2017.2690939 [72] Park P. Traffic generation rate control of wireless sensor and actuator networks. IEEE Communications Letters, 2015, 19(5):827-830 doi: 10.1109/LCOMM.2015.2409064 [73] Kim D, Won Y, Eun Y, Park K J. W-Simplex: resilient network and control co-design under wireless channel uncertainty in cyber-physical systems. In: Proceedings of the 2017 IEEE Conference on Control Technology and Applications (CCTA). Mauna Lani, HI, USA: IEEE, 2017. 49-54 https://ieeexplore.ieee.org/document/8062439 [74] Lorenzo B, Garcia-Rois J, Li X H, Gonzalez-Castano J, Fang Y G. A robust dynamic edge network architecture for the internet of things. IEEE Network, 2018, 32(1):8-15 https://ieeexplore.ieee.org/document/8270625 [75] Samant R, Agrawal A, Behera L. Design of communication network for cyber physical system. In: Proceedings of the 39th National Systems Conference (NSC). Noida, India: IEEE, 2015. 1-6 https://ieeexplore.ieee.org/document/7489082 [76] Fallah Y P, Sengupta R. A cyber-physical systems approach to the design of vehicle safety networks. In: Proceedings of the 32nd International Conference on Distributed Computing Systems Workshops. Macau, China: IEEE, 2012. 324-329 https://ieeexplore.ieee.org/document/6258175 [77] Taha A F, Gatsis N, Summers T, Nugroho S. Actuator selection for cyber-physical systems. In: Proceedings of the 2017 American Control Conference (ACC). Seattle, WA, USA: IEEE, 2017. 5300-5305 https://ieeexplore.ieee.org/document/7963778 [78] Shen C, Chen S B. A cyber-physical design for indoor temperature monitoring using wireless sensor networks. In: Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC). San Francisco, CA, USA: IEEE, 2017. 1-6 https://ieeexplore.ieee.org/document/7925596 [79] Mariappan R, Reddy P V N, Wu C. Cyber physical system using intelligent wireless sensor actuator networks for disaster recovery. In: Proceedings of the 2015 International Conference on Computational Intelligence and Communication Networks (CICN). Jabalpur, India: IEEE, 2015. 95-99 https://ieeexplore.ieee.org/document/7546063 [80] Garay J R B, Kofuji S T. Architecture for sensor networks in cyber-physical system. In: Proceedings of the 2010 IEEE Latin-American Conference on Communications. Bogota, Colombia: IEEE, 2010. 1-6 https://ieeexplore.ieee.org/document/5641126 [81] Triki B, Rekhis S, Boudriga N. A novel secure and multipath routing algorithm in wireless sensor networks. In: Proceedings of the 2010 International Conference on Data Communication Networking (DCNET). Athens, Greece: IEEE, 2010. 25-34 https://ieeexplore.ieee.org/document/5740713 [82] Pitt L, Green P R, Lennox B. A sensor network for predicting and maintaining occupant comfort. In: Proceedings of the 2013 IEEE Workshop on Environmental Energy and Structural Monitoring Systems. Trento, Italy: IEEE, 2013. 19-24 https://ieeexplore.ieee.org/document/6661696 [83] Zhang R R. Research on advanced sensor network based cyber-physical system for the smart grid. In: Proceedings of the 2014 China International Conference on Electricity Distribution (CICED). Shenzhen, China: IEEE, 2014. 423-426 https://ieeexplore.ieee.org/document/6991742 [84] Schleich B, Anwer N, Mathieu L, Wartzack S. Shaping the digital twin for design and production engineering. CIRP Annals, 2017, 66(1):141-144 doi: 10.1016/j.cirp.2017.04.040 [85] Grieves M. Digital Twin: Manufacturing Excellence through Virtual Factory Replication. White paper, Florida Institute of Technology. 2015. [86] Alam K M, El Saddik A. C2PS:a digital twin architecture reference model for the cloud-based cyber-physical systems. IEEE Access, 2017, 5:2050-2062 doi: 10.1109/ACCESS.2017.2657006 [87] Coronado P D U, Lynn R, Louhichi W, Parto M, Wescoat E, Kurfess T. Part data integration in the shop floor digital twin:mobile and cloud technologies to enable a manufacturing execution system. Journal of Manufacturing Systems, 2018, 48:25-33 doi: 10.1016/j.jmsy.2018.02.002 [88] Zhuang C B, Liu J H, Xiong H. Digital twin-based smart production management and control framework for the complex product assembly shop-floor. International Journal of Advanced Manufacturing Technology, 2018, 96(1-4):1149-1163 doi: 10.1007%2Fs00170-018-1617-6 [89] Iglesias D, Bunting P, Esquembri S, Hollocombe J, Silburn S, Vitton-Mea L, et al. Digital twin applications for the JET divertor. Fusion Engineering and Design, 2017, 125:71-76 doi: 10.1016/j.fusengdes.2017.10.012 [90] 彭昆仑, 彭伟, 王东霞, 邢倩倩.信息物理融合系统安全问题研究综述.信息网络安全, 2016, (7):20-28 doi: 10.3969/j.issn.1671-1122.2016.07.004Peng Kun-Lun, Peng Wei, Wang Dong-Xia, Xing Qian-Qian. Research survey on security issues in cyber-physical systems. Netinfo Security, 2016, (7):20-28 doi: 10.3969/j.issn.1671-1122.2016.07.004 [91] Zhao Y H, He X, Zhou D H. Optimal joint control and triggering strategies against denial of service attacks:a zero-sum game. IET Control Theory and Applications, 2017, 11(14):2352-2360 doi: 10.1049/iet-cta.2016.0601 [92] Yang C, Yang W, Shi H B. DoS attack in centralised sensor network against state estimation. IET Control Theory and Applications, 2018, 12(9):1244-1253 doi: 10.1049/iet-cta.2017.0819 [93] Yang Q Y, Yang J, Yu W, An D, Zhang N, Zhao W. On false data-injection attacks against power system state estimation:modeling and countermeasures. IEEE Transactions on Parallel and Distributed Systems, 2014, 25(3):717-729 https://ieeexplore.ieee.org/document/6490324 [94] Zhao J F, Wang J, Yin L. Detection and control against replay attacks in smart grid. In: Proceedings of the 12th International Conference on Computational Intelligence and Security (CIS). Wuxi, China: IEEE, 2016. 624-627 https://ieeexplore.ieee.org/document/7820542 [95] Esmalifalak M, Shi G, Han Z, Song L Y. Bad data injection attack and defense in electricity market using game theory study. IEEE Transactions on Smart Grid, 2013, 4(1):160-169 doi: 10.1109/TSG.2012.2224391 [96] Beg O A, Johnson T T, Davoudi A. Detection of false-data injection attacks in cyber-physical DC microgrids. IEEE Transactions on Industrial Informatics, 2017, 13(5):2693-2703 doi: 10.1109/TII.2017.2656905 [97] Yu J J Q, Hou Y H, Li V O K. Online false data injection attack detection with wavelet transform and deep neural networks. IEEE Transactions on Industrial Informatics, 2018, 14(7):3271-3280 doi: 10.1109/TII.2018.2825243 [98] Zhu M H, Martínez S. On the performance analysis of resilient networked control systems under replay attacks. IEEE Transactions on Automatic Control, 2014, 59(3):804-808 doi: 10.1109/TAC.2013.2279896 [99] Biron Z A, Dey S, Pisu P. Resilient control strategy under denial of service in connected vehicles. In: Proceedings of the 2017 American Control Conference (ACC). Seattle, WA, USA: IEEE, 2017. 4971-4976 [100] 胡虎, 赵敏, 宁振波, 郭朝晖, 陈志成, 朱铎先, 等.三体智能革命.北京:机械工业出版社, 2016.Hu Hu, Zhao Min, Ning Zhen-Bo, Guo Zhao-Hui, Chen Zhi-Cheng, Zhu Duo-Xian, et al. Three-body Intelligence Revolution. Beijing:China Machine Press, 2016. [101] Yang B, Li J W, Han Q N, He T, Chen C L, Guan X P. Distributed control for charging multiple electric vehicles with overload limitation. IEEE Transactions on Parallel and Distributed Systems, 2016, 27(12):3441-3454 doi: 10.1109/TPDS.2016.2533614 [102] Yang B, Shen Y Y, Han Q N, Chen C L, Guan X P, Zhang W D. Energy-efficient resource allocation for time-varying OFDMA relay systems with hybrid energy supplies. IEEE Systems Journal, 2018, 12(1):702-713 doi: 10.1109/JSYST.2016.2551319 [103] 何潇, 王子栋, 刘洋, 吉吟东, 周东华.基于Internet的网络化三容水箱实验平台.南京航空航天大学学报, 2011, 43(S1):190-193 http://d.old.wanfangdata.com.cn/Conference/7494302He Xiao, Wang Zi-Dong, Liu Yang, Ji Yin-Dong, Zhou Dong-Hua. Internet-based three-tank experimental platform. Journal of Nanjing University of Aeronautics and Astronautics, 2011, 43(S1):190-193 http://d.old.wanfangdata.com.cn/Conference/7494302 [104] Zhou D H, He X, Wang Z D, Liu G P, Ji Y D. Leakage fault diagnosis for an internet-based three-tank system:an experimental study. IEEE Transactions on Control Systems Technology, 2012, 20(4):857-870 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dcdade5c459f91be56995f5823eb2ba0 [105] He X, Wang Z D, Ji Y D, Zhou D H. Robust fault detection for networked systems with distributed sensors. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(1):166-177 doi: 10.1109/TAES.2011.5705667 [106] He X, Wang Z D, Wang X F, Zhou D H. Networked strong tracking filtering with multiple packet dropouts:algorithms and applications. IEEE Transactions on Industrial Electronics, 2014, 61(3):1454-1463 doi: 10.1109/TIE.2013.2261038 [107] 邱伯华, 张玉峰, 魏慕恒, 何晓, 张羽, 朱慧敏. "大智号":智慧领航.科技纵览, 2018, (2):66-69 doi: 10.3969/j.issn.2095-4409.2018.02.025Qiu Bo-Hua, Zhang Yu-Feng, Wei Mu-Heng, He Xiao, Zhang Yu, Zhu Hui-Min. Great intelligence:cyber-enable ship. IEEE Spectrum, 2018, (2):66-69 doi: 10.3969/j.issn.2095-4409.2018.02.025 [108] 邱伯华, 蒋云鹏, 魏慕恒, 何晓, 朱武.知识经济与CPS在船舶工业中的应用实践.信息技术与标准化, 2016, (11):17-21 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20162016123000024868Qiu Bo-Hua, Jiang Yun-Peng, Wei Mu-Heng, He Xiao, Zhu Wu. Knowledge economy and the application of CPS in shipbuilding industry. Information Technology and Standardization, 2016, (11):17-21 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QKC20162016123000024868 [109] Qiu B H, Zhang Y, Wei M H, Li Y J, Wang Y. Hybrid cloud based cyber-enabled ship control and management system. In: Proceedings of the 2018 IEEE International Conference on Prognostics and Health Management (ICPHM). Seattle, WA, USA: IEEE, 2018. 1-6 [110] 李杰[著], 邱伯华, 刘宗长, 魏慕恒, 董智升[译].工业大数据: 工业4.0时代的工业转型与价值创造.北京: 机械工业出版社, 2015.Lee J[Author], Qiu Bo-Hua, Liu Zong-Chang, Wei Mu-Heng, Dong Zhi-Sheng[Translator]. Industrial Big Data: The Revolutionary Transformation and Value Creation in Industry 4.0 Era. Beijing: China Machine Press, 2015. -

 下载:
下载:


图(4)
计量
- 文章访问数: 7114
- HTML全文浏览量: 3115
- PDF下载量: 2823
- 被引次数: 0
