

An Ofi-line State Estimator With Sensor Gain Degradation, Transmission Delays and Data Dropouts
-
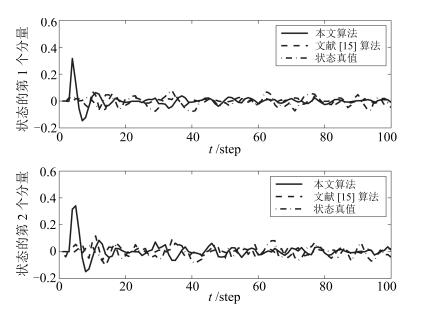
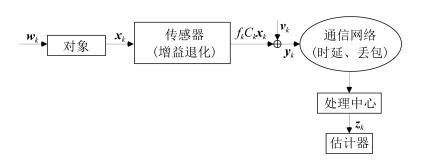
摘要: 研究了具有传感器增益退化、数据传输时延和丢包的网络化状态估计问题, 传感器增益退化现象通过统计特性已知的随机变量来描述, 数据包时延和丢失发生于传感器量测输出向远程处理中心传送过程中, 将各时延的发生描述为随机过程, 在远程处理中心端建立只存储最新时刻数据包的时延-丢包模型, 考虑到利用每一时刻实时的时延值和丢包情况, 设计了一种离线的无偏估计器, 推导出最小方差原则下的离线最优估计器增益.最后, 通过算例仿真验证所设计离线状态估计器的有效性.Abstract: The state estimation problem is investigated for a class of networked stochastic systems subject to sensor gain degradation, stochastic data transmission delays, and data dropouts. The sensor gain degradation is described by random variable whose probability is assumed to be known. Stochastic delays and data dropouts are considered when the sensor transmits its measurement to the remote processing node. Data transmission delays are considered to be a stochastic process, and a delay-dropout model is put forward to account for receiving the newest packet. An off-line unbiased state estimator is proposed to make good use of real-time delay and dropout information, and the optimal estimator gain is obtained by minimizing the mean square error. Finally, a simulation example is given to confirm the effectiveness of the proposed approach.
-
Key words:
- Sensor gain degradation /
- transmission delay /
- data dropout /
- networked state estimation
1) 本文责任编委 董海荣 -
表 1 退化系数分布在不同区间下的估计稳态误差
Table 1 Steady-state error with different distribution interval of the degradation coefficient
$ Df $ tr$ (P_{k} ) $ $ [0.6, 0.8] $ 0.0708 $ [0.3, 0.5] $ 0.0939 $ [0.1, 0.3] $ 0.1341  下载: 导出CSV
下载: 导出CSV
表 2 乘性噪声分布在不同区间下的估计稳态误差
Table 2 Steady-state error with different distribution interval of the multiplicative noise
$ Dg $ tr$ (P_{k} ) $ $ [-0.1, 0.1] $ 0.0708 $ [-0.3, 0.3] $ 0.0768 $ [-0.5, 0.5] $ 0.0886
下载: 导出CSV
-
[1] 祁波, 孙书利.带未知通信干扰和丢包补偿的多传感器网络化不确定系统的分布式融合滤波.自动化学报, 2018, 44(6): 1107- 1114 doi: 10.16383/j.aas.2017.c160652Qi Bo, Sun Shu-Li. Distributed fusion filtering for multi-sensor networked uncertain systems with unknown communication disturbances and compensations of packet dropouts. Acta Automatica Sinica, 2018, 44(6): 1107-1114 doi: 10.16383/j.aas.2017.c160652 [2] Yong S Z, Zhu M H, Frazzoli E. A unified filter for simultaneous input and state estimation of linear discrete-time stochastic systems. Automatica, 2016, 63: 321-329 doi: 10.1016/j.automatica.2015.10.040 [3] Ma J, Sun S L. Distributed fusion filter for networked stochastic uncertain systems with transmission delays and packet dropouts. Signal Processing, 2017, 130: 268-278 doi: 10.1016/j.sigpro.2016.07.004 [4] Hu J, Wang Z D, Chen D Y, Alsaadi F E. Estimation, filtering and fusion for networked systems with network-induced phenomena: new progress and prospects. Information Fusion, 2016, 31: 65-75 doi: 10.1016/j.inffus.2016.01.001 [5] 李娜, 马静, 孙书利.带多丢包和滞后随机不确定系统的最优线性估计.自动化学报, 2015, 41(3): 611-619 doi: 10.16383/j.aas.2015.c140484Li Na, Ma Jing, Sun Shu-Li. Optimal linear estimation for stochastic uncertain systems with multiple packet dropouts and delays. Acta Automatica Sinica, 2015, 41(3): 611-619 doi: 10.16383/j.aas.2015.c140484 [6] Sun S L. Optimal linear filters for discrete-time systems with randomly delayed and lost measurements with/without time stamps. IEEE Transactions on Automatic Control, 2013, 58(6): 1551-1556 doi: 10.1109/TAC.2012.2229812 [7] Sun S L, Wang G H. Modeling and estimation for networked systems with multiple random transmission delays and packet losses. Systems and Control Letters, 2014, 73: 6 -16 doi: 10.1016/j.sysconle.2014.07.005 [8] Li N, Sun S L, Ma J. Multi-sensor distributed fusion filtering for networked systems with different delay and loss rates. Digital Signal Processing, 2014, 34: 29-38 doi: 10.1016/j.dsp.2014.07.016 [9] Ma J, Sun S L. Centralized fusion estimators for multisensor systems with random sensor delays, multiple packet dropouts and uncertain observations. IEEE Sensors Journal, 2013, 13(4): 1228-1235 doi: 10.1109/JSEN.2012.2227995 [10] Chen B, Yu L, Zhang W A. Robust Kalman filtering for uncertain state delay systems with random observation delays and missing measurements. IET Control Theory and Applications, 2011, 5(17): 1945-1954 doi: 10.1049/iet-cta.2010.0685 [11] Solomon I S D, Knight A J. Spatial processing of signals received by platform mounted sonar. IEEE Journal of Oceanic Engineering, 2002, 27(1): 57-65 doi: 10.1109/48.989887 [12] Yalcin H, Collins R, Hebert M. Background estimation under rapid gain change in thermal imagery. In: Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. San Diego, CA, USA: IEEE, 2007. 12 [13] Zhou D H, He X, Wang Z D, Liu G P, Ji Y D. Leakage fault diagnosis for an internet-based three-tank system: an experimental study. IEEE Transactions on Control Systems Technology, 2012, 20(4): 857-870 doi: 10.1109/TCST.2011.2154383 [14] 赵国荣, 韩旭, 万兵, 闫鑫.具有传感器增益退化、随机时延和丢包的分布式融合估计器.自动化学报, 2016, 42(7): 1053-1064 doi: 10.16383/j.aas.2016.c150320Zhao Guo-Rong, Han Xu, Wan Bing, Yan Xin. A decentralized fusion estimator with stochastic sensor gain degradation, delays and data dropouts. Acta Automatica Sinica, 2016, 42(7): 1053-1064 doi: 10.16383/j.aas.2016.c150320 [15] Liu Y, He X, Wang Z D, Zhou D H. Optimal filtering for networked systems with stochastic sensor gain degradation. Automatica, 2014, 50(5): 1521-1525 doi: 10.1016/j.automatica.2014.03.002 [16] Gao H J, Meng X Y, Chen T W. Stabilization of networked control systems with a new delay characterization. IEEE Transactions on Automatic Control, 2008, 53(9): 2142-2148 doi: 10.1109/TAC.2008.930190 -

 下载:
下载:


图(3) / 表(2)
计量
- 文章访问数: 1858
- HTML全文浏览量: 259
- PDF下载量: 152
- 被引次数: 0
