

-
摘要: 面对中国社会快速老龄化现状和庞大的残疾人群,康复辅助机器人研究具有重要学术价值和广阔的应用前景.康复辅助机器人研究涉及神经科学、生物力学、机器人自动控制等领域知识,是机器人最具挑战性和最受关注的研究领域之一.与其他机器人不同,康复辅助机器人的作用对象是人,存在人与机器人的信息交流和能量交换,物理人机交互控制方法是其研究核心和关键技术.本文以神经康复机器人、穿戴式外骨骼、智能假肢等应用为例,介绍当前的研究现状,并重点介绍人体运动意图识别方法和交互控制方法等研究重点和难点.最后展望该领域的未来技术发展方向.Abstract: With the rapid growth of China's aging and disabled population, researches on rehabilitation and assistive robots have great value to technical study and good prospects for applications. Rehabilitation and assistive robots involve the domain knowledge of neuroscience, biomechanics, robot automatic control, etc., thus are one of the most challenging and most concerned research areas of robotics. As the application contexts of rehabilitation and assistance entail information communication and energy exchange between man and robot, the physical human-robot interaction control method is the key theme. This article briefly introduces the states of the art of neurorehabilitation robots, wearable exoskeletons, and intelligent prostheses, and focuses on the key issues and research priorities in human motion intent detection methods and interaction control methods. Finally, the future development directions are prospected.1) 本文责任编委 孙健
-
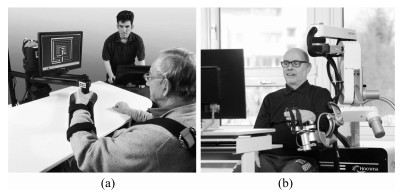
图 1 MIT-Manus与Armeo Power上肢康复机器人
Fig. 1 MIT-Manus and Armeo Power upper limb rehabilitation robots
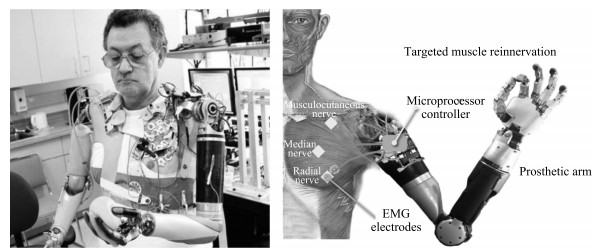
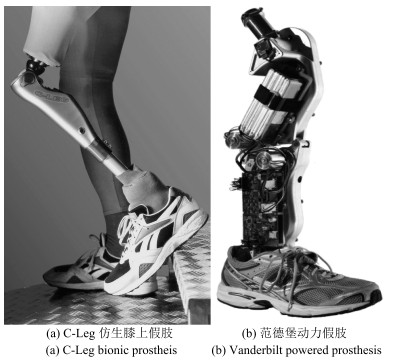
图 5 基于TMR手术和表面肌电信号控制的动力型假肢
Fig. 5 Power prothesis controlled by sEMG signal via targeted muscle reinnervation
-
[1] 侯增广, 赵新刚, 程龙, 王启宁, 王卫群.康复机器人与智能辅助系统的研究进展.自动化学报, 2016, 42(12):1765-1779 http://www.aas.net.cn/CN/abstract/abstract18966.shtmlHou Zeng-Guang, Zhao Xin-Gang, Cheng Long, Wang Qi-Ning, Wang Wei-Qun. Recent advances in rehabilitation robots and intelligent assistance systems. Acta Automatica Sinica, 2016, 42(12):1765-1779 http://www.aas.net.cn/CN/abstract/abstract18966.shtml [2] Losey D P, McDonald C G, Battaglia E, O'Malley M K. A review of intent detection, arbitration, and communication aspects of shared control for physical human-robot interaction. Applied Mechanics Reviews, 2018, 70(1):Article No. 010804 http://adsabs.harvard.edu/abs/2018ApMRv..70a0804. [3] Marchal-Crespo L, Reinkensmeyer D J. Review of control strategies for robotic movement training after neurologic injury. Journal of Neuroengineering and Rehabilitation, 2009, 6:Article No. 20 doi: 10.1186/1743-0003-6-20 [4] De Santis A, Siciliano B, De Luca A, Bicchi A. An atlas of physical human-robot interaction. Mechanism and Machine Theory, 2008, 43(3):253-270 doi: 10.1016/j.mechmachtheory.2007.03.003 [5] Maciejasz P, Eschweiler J, Gerlach-Hahn K, Jansen-Troy A, Leonhardt S. A survey on robotic devices for upper limb rehabilitation. Journal of Neuroengineering and Rehabilitation, 2014, 11:Article No. 3 doi: 10.1186/1743-0003-11-3 [6] Hogan N, Krebs H I, Charnnarong J, Srikrishna P, Sharon A. Mit-manus: a workstation for manual therapy and training. Ⅰ. In: Proceedings of the 1992 IEEE International Workshop on Robot and Human Communication. Tokyo, Japan: IEEE, 1992. 161-165 http://www.mendeley.com/catalog/mitmanus-workstation-manual-therapy-training-i/ [7] Kwakkel G, Kollen B J, Krebs H I. Effects of robot-assisted therapy on upper limb recovery after stroke:a systematic review. Neurorehabilitation and Neural Repair, 2008, 22(2):111-121 doi: 10.1177/1545968307305457 [8] Nef T, Mihelj M, Colombo G, Riener R. Armin-robot for rehabilitation of the upper extremities. In: Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, FL, USA: IEEE, 2006. 3152-3157 http://www.mendeley.com/research/armin-robot-rehabilitation-upper-extremities/ [9] Klamroth-Marganska V, Blanco J, Campen K, Curt A, Dietz V, Ettlin T, et al. Three-dimensional, task-specific robot therapy of the arm after stroke:a multicentre, parallel-group randomised trial. The Lancet Neurology, 2014, 13(2):159-166 http://www.sciencedirect.com/science/article/pii/S1474442213703053 [10] Jezernik S, Colombo G, Keller T, Frueh H, Morari M. Robotic orthosis lokomat:a rehabilitation and research tool. Neuromodulation:Technology at the Neural Interface, 2003, 6(2):108-115 doi: 10.1046/j.1525-1403.2003.03017.x [11] Duschau-Wicke A, von Zitzewitz J, Caprez A, Lunenburger L, Riener R. Path control:a method for patient-cooperative robot-aided gait rehabilitation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2010, 18(1):38-48 doi: 10.1109/TNSRE.2009.2033061 [12] 明东, 蒋晟龙, 王忠鹏, 綦宏志, 万柏坤.基于人机信息交互的助行外骨骼机器人技术进展.自动化学报, 2017, 43(7):1089-1100 http://www.aas.net.cn/CN/abstract/abstract19085.shtmlMing Dong, Jiang Sheng-Long, Wang Zhong-Peng, Qi Hong-Zhi, Wan Bai-Kun. Review of walk assistant exoskeleton technology:human-machine interaction. Acta Automatica Sinica, 2017, 43(7):1089-1100 http://www.aas.net.cn/CN/abstract/abstract19085.shtml [13] Zoss A B, Kazerooni H, Chu A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Transactions on Mechatronics, 2006, 11(2):128-138 doi: 10.1109/TMECH.2006.871087 [14] Mertz L. The next generation of exoskeletons:lighter, cheaper devices are in the works. IEEE Pulse, 2012, 3(4):56-61 doi: 10.1109/MPUL.2012.2196836 [15] Lee S, Sankai Y. Power assist control for leg with HAL-3 based on virtual torque and impedance adjustment. In: Proceedings of the 2002 IEEE International Conference on Systems, Man, and Cybernetics. Yasmine Hammamet, Tunisia: IEEE, 2002. 6 http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=1173329 [16] Esquenazi A, Talaty M, Packel A, Saulino M. The rewalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury. American Journal of Physical Medicine and Rehabilitation, 2012, 91(11):911-921 doi: 10.1097/PHM.0b013e318269d9a3 [17] Wehner M, Quinlivan B, Aubin P M, Martinez-Villalpando E, Baumann M, Stirling L, et al. A lightweight soft exosuit for gait assistance. In: Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA). Karlsruhe, Germany: IEEE, 2013. 3362-3369 http://www.mendeley.com/catalog/lightweight-soft-exosuit-gait-assistance/ [18] Asbeck A T, De Rossi S M M, Galiana I, Ding Y, Walsh C J. Stronger, smarter, softer:next-generation wearable robots. IEEE Robotics and Automation Magazine, 2014, 21(4):22-33 doi: 10.1109/MRA.2014.2360283 [19] Araromi O A, Walsh C J, Wood R J. Hybrid carbon fiber-textile compliant force sensors for high-load sensing in soft exosuits. In: Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Vancouver, BC, Canada: IEEE, 2017. 1798-1803 http://ieeexplore.ieee.org/document/8205994/ [20] Reiter R. Eine neue elektrokunsthand. Grenzgebiete der Medizin, 1948, 1(4):133-135 [21] Kuiken T A, Li G L, Lock B A, Lipschutz R D, Miller L A, Stubblefield K A, et al. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms. JAMA, 2009, 301(6):619-628 doi: 10.1001/jama.2009.116 [22] 黄剑平, 李文庆, 杨琳, 朱明星, 朱小弟, 李楚炎等.上肢经肱骨截肢神经功能重建研究.集成技术, 2016, 5(5):30-37 http://d.old.wanfangdata.com.cn/Periodical/jcjx201605003Huang Jian-Ping, Li Wen-Qing, Yang Lin, Zhu Ming-Xing, Zhu Xiao-Di, Li Chu-Yan, et al. A pilot study of nerve function reinnervation on a transhumeral amputee. Journal of Integration Technology, 2016, 5(5):30-37 http://d.old.wanfangdata.com.cn/Periodical/jcjx201605003 [23] Orendurff M S, Segal A D, Klute G K, McDowell M L, Pecoraro J A, Czerniecki J M. Gait efficiency using the c-leg. Journal of Rehabilitation Research and Development, 2006, 43(2):239-246 doi: 10.1682/JRRD.2005.06.0095 [24] Lawson B E, Mitchell J, Truex D, Shultz A, Ledoux E, Goldfarb M. A robotic leg prosthesis:design, control, and implementation. IEEE Robotics and Automation Magazine, 2014, 21(4):70-81 doi: 10.1109/MRA.2014.2360303 [25] Schultz A E, Kuiken T A. Neural interfaces for control of upper limb prostheses:the state of the art and future possibilities. PM & R, 2011, 3(1):55-67 http://www.sciencedirect.com/science/article/pii/S1934148210005174 [26] Rebsamen B, Guan C T, Zhang H H, Wang C C, Teo C, Ang M H, et al. A brain controlled wheelchair to navigate in familiar environments. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2010, 18(6):590-598 doi: 10.1109/TNSRE.2010.2049862 [27] Jiang N, Englehart K B, Parker P A. Extracting simultaneous and proportional neural control information for multiple-DOF prostheses from the surface electromyographic signal. IEEE Transactions on Biomedical Engineering, 2009, 56(4):1070-1080 doi: 10.1109/TBME.2008.2007967 [28] Shen B Q, Li J F, Bai F J, Chew C M. Motion intent recognition for control of a lower extremity assistive device. In: Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation (ICMA). Takamatsu, Japan: IEEE, 2013. 926-931 http://www.mendeley.com/catalog/motion-intent-recognition-control-lower-extremity-assistive-device-lead/ [29] Burdet E, Milner T E. Quantization of human motions and learning of accurate movements. Biological Cybernetics, 1998, 78(4):307-318 doi: 10.1007/s004220050435 [30] Negro F, Muceli S, Castronovo A M, Holobar A, Farina D. Multi-channel intramuscular and surface EMG decomposition by convolutive blind source separation. Journal of Neural Engineering, 2016, 13(2):Article No. 026027 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c15f5fbe316d25cde6279ab9d4cedca3 [31] Hargrove L J, Englehart K, Hudgins B. A comparison of surface and intramuscular myoelectric signal classification. IEEE Transactions on Biomedical Engineering, 2007, 54(5):847-853 doi: 10.1109/TBME.2006.889192 [32] Vallery H, Veneman J, van Asseldonk E, Ekkelenkamp R, Buss M, van der Kooij H. Compliant actuation of rehabilitation robots. IEEE Robotics and Automation Magazine, 2008, 15(3):60-69 doi: 10.1109/MRA.2008.927689 [33] Wolf S, Grioli G, Eiberger O, Friedl W, Grebenstein M, Höppner H, et al. Variable stiffness actuators:review on design and components. IEEE/ASME Transactions on Mechatronics, 2016, 21(5):2418-2430 doi: 10.1109/TMECH.2015.2501019 [34] Engemann D A, Gramfort A. Automated model selection in covariance estimation and spatial whitening of MEG and EEG signals. NeuroImage, 2015, 108:328-342 doi: 10.1016/j.neuroimage.2014.12.040 [35] Fougner A, Scheme E, Chan A D C, Englehart K, Stavdahl Ø. Resolving the limb position effect in myoelectric pattern recognition. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2011, 19(6):644-651 doi: 10.1109/TNSRE.2011.2163529 [36] Peng L, Hou Z G, Chen Y X, Wang W Q, Tong L N, Li P F. Combined use of sEMG and accelerometer in hand motion classification considering forearm rotation. In: Proceedings of the 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). Osaka, Japan: IEEE, 2013. 4227-4230 http://www.mendeley.com/research/combined-semg-accelerometer-hand-motion-classification-considering-forearm-rotation/ [37] Cé E, Rampichini S, Monti E, Venturelli M, Limonta E, Esposito F. Changes in the electromechanical delay components during a fatiguing stimulation in human skeletal muscle:an EMG, MMG and force combined approach. European Journal of Applied Physiology, 2017, 117(1):95-107 doi: 10.1007/s00421-016-3502-z [38] Zardoshti-Kermani M, Wheeler B C, Badie K, Hashemi R M. EMG feature evaluation for movement control of upper extremity prostheses. IEEE Transactions on Rehabilitation Engineering, 1995, 3(4):324-333 doi: 10.1109/86.481972 [39] Boostani R, Moradi M H. Evaluation of the forearm EMG signal features for the control of a prosthetic hand. Physiological Measurement, 2003, 24(2):309-319 doi: 10.1088/0967-3334/24/2/307 [40] Nazmi N, Rahman M A A, Yamamoto S I, Ahmad S A, Zamzuri H, Mazlan S A. A review of classification techniques of EMG signals during isotonic and isometric contractions. Sensors, 2016, 16(8):Article No. 1304 doi: 10.3390/s16081304 [41] Shao Q, Bassett D N, Manal K, Buchanan T S. An EMG-driven model to estimate muscle forces and joint moments in stroke patients. Computers in Biology and Medicine, 2009, 39(12):1083-1088 doi: 10.1016/j.compbiomed.2009.09.002 [42] Buchanan T S, Lloyd D G, Manal K, Besier T F. Neuromusculoskeletal modeling:estimation of muscle forces and joint moments and movements from measurements of neural command. Journal of Applied Biomechanics, 2004, 20(4):367-395 doi: 10.1123/jab.20.4.367 [43] Lloyd D G, Besier T F. An EMG-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo. Journal of Biomechanics, 2003, 36(6):765-776 doi: 10.1016/S0021-9290(03)00010-1 [44] Kiguchi K, Hayashi Y. An EMG-based control for an upper-limb power-assist exoskeleton robot. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 2012, 42(4):1064-1071 doi: 10.1109/TSMCB.2012.2185843 [45] Kawamoto H, Sankai Y. Comfortable power assist control method for walking aid by HAL-3. In: Proceedings of the 2002 IEEE International Conference on Systems, Man, and Cybernetics. Yasmine Hammamet, Tunisia: IEEE, 2002. http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=1173328 [46] 彭亮, 侯增广, 王卫群.康复机器人的同步主动交互控制与实现.自动化学报, 2015, 41(11):1837-1846 http://www.aas.net.cn/CN/abstract/abstract18759.shtmlPeng Liang, Hou Zeng-Guang, Wang Wei-Qun. Synchronous active interaction control and its implementation for a rehabilitation robot. Acta Automatica Sinica, 2015, 41(11):1837-1846 http://www.aas.net.cn/CN/abstract/abstract18759.shtml [47] Yatsenko D, McDonnall D, Guillory K S. Simultaneous, proportional, multi-axis prosthesis control using multichannel surface EMG. In: Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Lyon, France: IEEE, 2007. 6133-6136 http://www.ncbi.nlm.nih.gov/pubmed/18003415/ [48] Lenzi T, De Rossi S M M, Vitiello N, Carrozza M C. Intention-based EMG control for powered exoskeletons. IEEE Transactions on Biomedical Engineering, 2012, 59(8):2180-2190 doi: 10.1109/TBME.2012.2198821 [49] Ge S S, Li Y A, He H S. Neural-network-based human intention estimation for physical human-robot interaction. In: Proceedings of the 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI). Incheon, South Korea: IEEE, 2011. 390-395 http://www.mendeley.com/catalog/neuralnetworkbased-human-intention-estimation-physical-humanrobot-interaction/ [50] Hogan N. Impedance control:an approach to manipulation:Part I:theory, Part Ⅱ:implementation, Part Ⅲ:applications. Journal of Dynamic Systems, Measurement, and Control, 1985, 107:1-24 doi: 10.1115/1.3140702 [51] Zlatnik D, Steiner B, Schweitzer G. Finite-state control of a trans-femoral (TF) prosthesis. IEEE Transactions on Control Systems Technology, 2002, 10(3):408-420 doi: 10.1109/87.998030 [52] Modares H, Ranatunga I, Lewis F L, Popa D O. Optimized assistive human-robot interaction using reinforcement learning. IEEE Transactions on Cybernetics, 2016, 46(3):655-667 doi: 10.1109/TCYB.2015.2412554 [53] Wen Y, Si J, Gao X, Huang S, Huang H H. A new powered lower limb prosthesis control framework based on adaptive dynamic programming. IEEE Transactions on Neural Networks and Learning Systems, 2017, 28(9):2215-2220 http://europepmc.org/abstract/MED/27416607 [54] Schaechter J D. Motor rehabilitation and brain plasticity after hemiparetic stroke. Progress in Neurobiology, 2004, 73(1):61-72 doi: 10.1016/j.pneurobio.2004.04.001 [55] Krakauer J W. Motor learning:its relevance to stroke recovery and neurorehabilitation. Current Opinion in Neurology, 2006, 19(1):84-90 doi: 10.1097/01.wco.0000200544.29915.cc [56] Carr J H, Shepherd R B. Stroke Rehabilitation: Guidelines for Exercise and Training to Optimize Motor Skill. Butterworth-Heinemann Medical, Oxford, UK, 2003. Stroke Rehabilitation: Guidelines for Exercise and Training to Optimize Motor Skill [57] Levin M F, Weiss P L, Keshner E A. Emergence of virtual reality as a tool for upper limb rehabilitation:incorporation of motor control and motor learning principles. Physical Therapy, 2015, 95(3):415-425 doi: 10.2522/ptj.20130579 [58] 胡进, 侯增广, 陈翼雄, 张峰, 王卫群.下肢康复机器人及其交互控制方法.自动化学报, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtmlHu Jin, Hou Zeng-Guang, Chen Yi-Xiong, Zhang Feng, Wang Wei-Qun. Lower limb rehabilitation robots and interactive control methods. Acta Automatica Sinica, 2014, 40(11):2377-2390 http://www.aas.net.cn/CN/abstract/abstract18514.shtml [59] Basteris A, Nijenhuis S M, Stienen A H A, Buurke J H, Prange G B, Amirabdollahian F. Training modalities in robot-mediated upper limb rehabilitation in stroke:a framework for classification based on a systematic review. Journal of Neuroengineering and Rehabilitation, 2014, 11:Article No. 111 doi: 10.1186/1743-0003-11-111 [60] Lo A C, Guarino P D, Richards L G, Haselkorn J K, Wittenberg G F, Federman D G, et al. Robot-assisted therapy for long-term upper-limb impairment after stroke. New England Journal of Medicine, 2010, 362(19):1772-1783 doi: 10.1056/NEJMoa0911341 [61] Reinkensmeyer D J, Wolbrecht E, Bobrow J. A computational model of human-robot load sharing during robot-assisted arm movement training after stroke. In: Proceedings of the 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Lyon, France: IEEE, 2007. 4019-4023 http://www.ncbi.nlm.nih.gov/pubmed/18002881 [62] Cai L L, Fong A J, Liang Y Q, Burdick J, Edgerton V R. Assist-as-needed training paradigms for robotic rehabilitation of spinal cord injuries. In: Proceedings of the 2006 IEEE International Conference on Robotics and Automation. Orlando, FL, USA: IEEE, 2006. 3504-3511 ssist-as-needed training paradigms for robotic rehabilitation of spinal cord injuries. [63] Krebs H I, Palazzolo J J, Dipietro L, Ferraro M, Krol J, Rannekleiv K, et al. Rehabilitation robotics:performance-based progressive robot-assisted therapy. Autonomous Robots, 2003, 15(1):7-20 doi: 10.1023/A:1024494031121 [64] Wolbrecht E T, Chan V, Reinkensmeyer D J, Bobrow J E. Optimizing compliant, model-based robotic assistance to promote neurorehabilitation. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2008, 16(3):286-297 doi: 10.1109/TNSRE.2008.918389 [65] Pehlivan A U, Losey D P, O'Malley M K. Minimal assist-as-needed controller for upper limb robotic rehabilitation. IEEE Transactions on Robotics, 2016, 32(1):113-124 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7dba74b5b9256a157f209f2c28b5611a -

 下载:
下载:

图(6)
计量
- 文章访问数: 4063
- HTML全文浏览量: 1474
- PDF下载量: 1555
- 被引次数: 0
