

-
摘要: 微零件的姿态测量对微装配具有重要的作用.但对于微球零件,其姿态的精确测量存在困难,影响了装配精度.针对带有微孔的微球,本文提出了一种基于单目显微视觉的微球姿态高精度测量方法.设计了一种由粗到精的微孔检测算法,实现了高精度的微孔定位.通过对相机光轴方向的标定,在相机运动后对微球图像坐标进行补偿,提高了在相机坐标系下的微球定位精度.通过对微球和微孔的精确定位,计算出微球球心与微孔圆心的空间相对位置,实现了相机坐标系下高精度的微球姿态测量.同时,根据标定出的相机坐标系与调整平台坐标系之间的旋转关系,将微球姿态转换到调整平台坐标系.实验结果表明,最大姿态测量误差0.3度,验证了本文方法的有效性.Abstract: Pose measurement for micro-components is very important to micro assembly. But it is quite difficult to measure the pose of a micro sphere with high precision, which impacts the assembly accuracy. An accurate pose measurement method for sphere with micro hole is proposed. A coarse-to-fine detection method is designed for the micro-hole on the micro-sphere. It realizes the high precision location of the micro-hole. The direction of the microscopic camera's optical axis is calibrated. It is used to compensate the micro-sphere's image coordinates after the microscopic camera moves in order to improve the location accuracy of the micro-sphere in the camera's frame. The relative position between the center of sphere and the center of hole can be easily derived from the accurately located micro-sphere and micro-hole. Then the pose of micro-sphere can be gotten. Meanwhile, the pose of micro-sphere can be transformed from the camera's frame into the frame of adjusting platform according to the calibrated rotation relationship between the two frames. The maximum error in pose measurements is 0.3 degree. Experimental results verify the effectiveness of the proposed method.
-
-

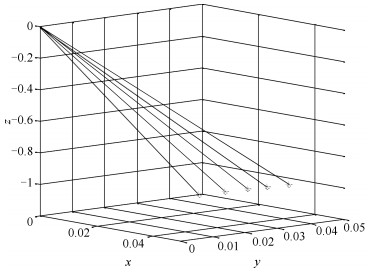
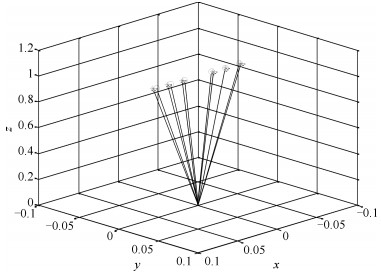
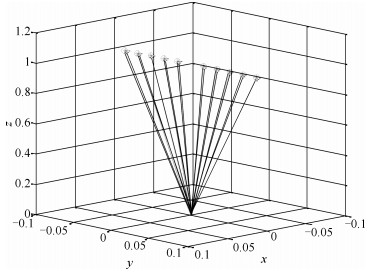
图 15 同时绕XW和YW轴旋转后的姿态向量
Fig. 15 The pose vector after rotating along with XW and YW axis, simultaneously
表 1 在坐标系{C}中的微球姿态向量
Table 1 The pose vector of micro-sphere in {C}
编号 1 2 3 4 5 ∆xc 0.0350 0.0362 0.0366 0.0370 0.0375 ∆yc 0.0186 0.0254 0.0320 0.0378 0.0439 ∆zc -0.9992 -0.9990 -0.9988 -0.9985 -0.9983  下载: 导出CSV
下载: 导出CSV
表 2 绕YW轴旋转的实验结果
Table 2 The results of rotating along with YW axis
绕XW, YW旋转角(度) 编号 真实值 测量值 1 0, -3 -0.04, -3.0 2 0, -2 -0.02, -2.0 3 0, -1 -0.04, -1.0 4 0, 1 0.06, 1.1 5 0, 2 -0.00, 2.2 6 0, 3 0.12, 3.1
下载: 导出CSV
表 3 绕XW轴旋转的实验结果
Table 3 The results of rotating along with XW axis
绕XW, YW旋转角(度) 编号 真实值 测量值 1 -5, 0 -4.9, -0.03 2 -4, 0 -3.9, 0.02 3 -3, 0 -2.9, -0.01 4 -2, 0 -2.0, -0.02 5 -1, 0 -1.0, -0.05 6 1, 0 1.0, -0.02 7 2, 0 2.0, -0.04 8 3, 0 3.0, 0.01 9 4, 0 3.9, 0.01 10 5, 0 4.9, -0.03
下载: 导出CSV
表 4 同时绕XW、YW轴旋转的实验结果
Table 4 The results of rotating along with XW, YW axis, simultaneously
绕XW, YW旋转角(度) 编号 真实值 测量值 1 -5, -3 -4.8, -3.1 2 -3, -2 -3.0, -2.1 3 -1, -1 -1.0, -1.1 4 1, 1 1.0, 0.9 5 3, 2 3.0, 1.8 6 5, 3 4.8, 2.8
下载: 导出CSV
-
[1] Liu S, Xu D, Zhang D, Zhang Z. High precision automatic assembly based on microscopic vision and force information. IEEE Transactions on Automation Science and Engineering, 2016, 13(1):382-393 doi: 10.1109/TASE.2014.2332543 [2] Liu S, Xu D, Liu F, Zhang D, Zhang Z. Relative pose estimation for alignment of long cylindrical components based on microscopic vision. IEEE/ASME Transactions on Mechatronics, 2016, 21(3), 1388-1398 doi: 10.1109/TMECH.2015.2506906 [3] Jin P, Matikainen P, Srinivasa S S. Sensor fusion for fiducial tags: highly robust pose estimation from single frame RGBD. In: Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver, Canada: IEEE, 2017. 5770-5776 [4] Zheng W, Yan B, Wang Z. Multi-sensor fusion based pose estimation for unmanned aerial vehicles on ships. In: Proceedings of the 2016 IEEE International Conference on Information and Automation. Ningbo, China: IEEE, 2016. 648-653 [5] Chen Y, Fu M, Yang Y, Song W. A method of head pose estimation based on active shape model and stereo vision. In: Proceedings of the 33rd Chinese Control Conference. Nanjing, China: IEEE, 2014. 8277-8282 [6] Su J, Huang X, Wang M. Pose detection of partly covered target in micro-vision system. In: Proceedings of the 10th World Congress on Intelligent Control and Automation. Beijing, China: IEEE, 2012. 4721-4725 [7] Zhang P, Xu D, Wu B. Pose estimation for plane based on monocular microscope vision system. In: Proceedings of the 32nd Chinese Control Conference. Xi'an, China: IEEE, 2013. 5687-5692 [8] Jiang C, Mills J K. Planar cell orientation control system using a rotating electric field. IEEE/ASME Transactions on Mechatronics, 2015, 20(5):2350-2358 doi: 10.1109/TMECH.2014.2377116 [9] Liu S, Li Y, Xing D, Xu D, Su H. An efficient insertion control method for precision assembly of cylindrical components. IEEE Transactions on Industrial Electronics, 2017, 64(12):9355-9365 doi: 10.1109/TIE.2017.2711551 [10] Park H, Park J, Lee D H, Park J H, Baeg M H, Bae J H. Compliance-based robotic peg-in-hole assembly strategy without force feedback. IEEE Transactions on Industrial Electronics, 2017, 64(8):6299-6309 doi: 10.1109/TIE.2017.2682002 [11] Das A N, Popa D O. Precision evaluation of modular multiscale robots for peg-in-hole microassembly tasks. In: Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco, USA: IEEE, 2011. 1699-1704 [12] 史亚莉, 张正涛, 徐德.跨尺度微管微球三维半自动装配点胶系统.光学精密工程, 2015, 23(11):3121-3128 http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201511016Shi Ya-li, Zhang Zheng-tao, Xu De. 3D semi-automatic assembly and dispensing system for trans-scale parts of micro-tube and micro-sphere. Optics and Precision Engineering, 2015, 23(11):3121-3128 http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201511016 [13] Li F, Xu D, Zhang Z, Shi Y, Shen F. Pose measuring and aligning of a micro glass tube and a hole on the micro sphere. International Journal of Precision Engineering and Manufacturing, 2014, 15(12):2483-2491 doi: 10.1007/s12541-014-0618-0 期刊类型引用(12)
1. 李诗航,孙玉洁,崔建峰,曾建潮,卢志刚. 军用无人系统协同感知与分布式滤波技术. 火力与指挥控制. 2024(03): 88-94 .  百度学术
百度学术2. 李颖,杨晓坤,李思嘉,熊洪樟. 基于无迹卡尔曼滤波的反窃电自动化检验系统. 电子设计工程. 2024(13): 104-107+112 . 百度学术3. 胡晓工,苏志坚,贾晓亮,吴光平,刘鹏. 基于分布式容积信息卡尔曼滤波的锂电池SOC估计. 自动化技术与应用. 2024(12): 1-7 . 百度学术4. 符太东,刘松旭,李育强. 基于盲均衡算法的网络大数据异常节点检测. 计算机仿真. 2023(07): 462-466 . 百度学术5. 刘宇,袁正,陈燕苹,彭慧. 基于鲁棒增强的因子图多源信息融合算法. 电子质量. 2023(08): 27-32 . 百度学术6. 刘鹏,徐昕恒,曾建潮,张鹏,卢志刚,马跃东. 机器人单兵室内定位理论与关键技术分析. 火力与指挥控制. 2022(03): 1-7 . 百度学术7. 李旭妍,刘长明,陈燕,畅彦祥. 基于EKF算法的微型AHRS模块设计. 国外电子测量技术. 2022(04): 93-98 . 百度学术8. 刘鹏,于镇滔,曾建潮,张鹏,卢志刚,马跃东. 机器人班组协同定位理论与技术研究. 火力与指挥控制. 2022(04): 5-10+18 . 百度学术9. 李孟委,徐文武,张鹏. 基于四元数互补滤波算法的车载MIMU. 河南理工大学学报(自然科学版). 2021(01): 111-117 . 百度学术10. 李维刚,张鹏,李孟委,王树森. 基于卡尔曼滤波的主子惯组匹配标定方法设计. 河南理工大学学报(自然科学版). 2021(02): 118-126 . 百度学术11. 张鹏,王树森,李孟委. SINS/GPS/PDR室内外无缝导航定位算法. 河南理工大学学报(自然科学版). 2021(03): 113-119 . 百度学术12. 曹红燕,刘长明,沈小林,牛兴龙,李大威,陈燕. 基于GPS/INS的自适应无迹Kalman滤波算法. 河南理工大学学报(自然科学版). 2021(06): 149-156 . 百度学术其他类型引用(23)
-



计量
- 文章访问数: 1895
- HTML全文浏览量: 522
- PDF下载量: 426
- 被引次数: 35
