

-
摘要: 本文研究多个传感器测量非线性系统时的分布式无迹Kalman滤波器(Unscented Kalman filter, UKF)的设计问题.借助离散多智能体系统有限时间平均一致算法的思想, 针对无向通信和有向通信网络分别设计了两种不同的滤波算法.对于无向连通的通信拓扑, 利用节点存储的一致性算法的迭代值构造差向量, 由该差向量构成的Hankel矩阵的核来得到分布式无迹Kalman滤波器, 并通过利用误差协方差矩阵的逆来构造Lyapunov函数, 基于随机稳定性引理证明了该有限时间一致无迹Kalman滤波器的稳定性.对于有向强连通的通信拓扑, 结合比率一致和Hankal矩阵的核来设计分布式无迹Kalman滤波器, 该滤波器的稳定性与无向通信拓扑的滤波器相同.最后, 通过仿真例子来验证所提滤波器的跟踪效果.
-
关键词:
- 一致Kalman滤波器 /
- 无迹Kalman滤波器 /
- 有限时间一致 /
- Hankel矩阵
Abstract: This paper investigates how to design the distributed unscented Kalman filter (UKF) for nonlinear system in sensor networks. With the aid of finite-time average consensus for discrete-time multi-agent systems, we present unscented Kalman filters for undirected and directed communication topologies, respectively. For the undirected communication case, the distributed unscented Kalman filter is computed by the kernels of some Hankel matrices. The components of these Hankel matrices are the difference values of this node0s current and past consensus iteration values. The stability of this filter is further proved via the Lyapunov function and the stochastic stability theory. For the strongly connected directed communication case, a distributed unscented Kalman filter is designed through combining ratio consensus and Hankel matrix. Finally, the tracking performance of these two filters are verified by the simulation examples.-
Key words:
- Consensus Kalman filter /
- unscented Kalman filter (UKF) /
- finite-time consensus /
- Hankel matrix
-
-
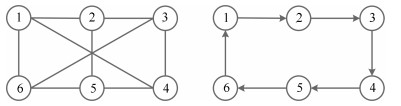
图 1 6个传感器构成的无向与有向通信图
Fig. 1 Undirected and directed communication topologies of 6 sensors
-
[1] Tian Y, Chen Z, Yin F L. Distributed IMM-unscented Kalman filter for speaker tracking in microphone array networks. IEEE/ACM Transactions on Audio, Speech, and Language Processing, 2015, 23(10): 1637-1647 doi: 10.1109/TASLP.2015.2442418 [2] Singh A K, Pal B C. Decentralized dynamic state estimation in power systems using unscented transformation. IEEE Transactions on Power Systems, 2014, 29(2): 794-804 http://cn.bing.com/academic/profile?id=a99fd7954029c6ae1fc2e92133b58d69&encoded=0&v=paper_preview&mkt=zh-cn [3] Qing X Y, Karimi H R, Niu Y G, et al. Decentralized unscented Kalman filter based on a consensus algorithm for multi-area dynamic state estimation in power systems. International Journal of Electrical Power & Energy Systems, 2015, 65: 26-33 http://cn.bing.com/academic/profile?id=236ef97621030d94b4ba7133c5284fba&encoded=0&v=paper_preview&mkt=zh-cn [4] Li W L, Jia Y M. Consensus-based distributed multiple model UKF for jump Markov nonlinear systems. IEEE Transactions on Automatic Control, 2012, 57(1): 230-236 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=92ab431dde19c263bdfaffc1e1579315 [5] Battistelli G, Chisci L, Mugnai G, et al. Consensus-based linear and nonlinear filtering. IEEE Transactions on Automatic Control, 2015, 60(5): 1410-1415 doi: 10.1109/TAC.2014.2357135 [6] Yuan Y, Shi L, Liu J, et al. Distributed Kalman filtering with minimum-time consensus algorithm[EB/OL]. arXiv: 1703.05438v1[cs.SY], March 16, 2017. [7] Li W L, Jia Y M. Distributed estimation for Markov jump systems via diffusion strategies. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(1): 448-460 doi: 10.1109/TAES.2017.2650801 [8] Olfati-Saber R, Murray R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Transactions on Automatic Control, 2004, 49(9): 1520-1533 doi: 10.1109/TAC.2004.834113 [9] Gu D B, Sun J X, Hu Z, et al. Consensus based distributed particle filter in sensor networks. In: Proceedings of the 2008 IEEE International Conference on Information and Automation. Zhangjiajie, China, 2008. 302-307 [10] Liu P, Tian Y P, Zhang Y. Distributed Kalman filtering with finite-time max-consensus protocol. IEEE Access, 2018, 6: 10795-10802 doi: 10.1109/ACCESS.2018.2809451 [11] Battistelli G, Chisci L. Stability of consensus extended Kalman filtering for distributed state estimation. Automatica, 2016, 68: 169-178 doi: 10.1016/j.automatica.2016.01.071 [12] Ren W, Al-Saggaf U M. Distributed Kalman-Bucy filter with embedded dynamic averaging algorithm. IEEE Systems Journal, 2018, 12(2): 1722-1730 doi: 10.1109/JSYST.2017.2657765 [13] Julier S J, Uhlmann J K. Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92(3): 401-422 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs-e200801002 [14] Gustafsson F, Hendeby G. Some relations between extended and unscented Kalman filters. IEEE Transactions on Signal Processing, 2012, 60(2): 545-555 doi: 10.1109/TSP.2011.2172431 [15] Chang L B, Hu B Q, Li A, et al. Transformed unscented Kalman filter. IEEE Transactions on Automatic Control, 2013, 58(1): 252-257 doi: 10.1109/TAC.2012.2204830 [16] Menegaz H M T, Ishihara J Y, Borges G A. New minimum sigma set for unscented filtering. International Journal of Robust and Nonlinear Control, 2015, 25(7): 3286-3298 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=a3129dbc2f74d32c6b77dfcc8403baf7 [17] Menegaz H M T, Ishihara J Y, Borges G A, et al. A systematization of the unscented Kalman filter theory. IEEE Transactions on Automatic Control, 2015, 60(10): 2583-2598 doi: 10.1109/TAC.2015.2404511 [18] Dunik J, Simandl M, Straka O. Unscented Kalman filter: Aspects and adaptive setting of scaling parameter. IEEE Transactions on Automatic Control, 2012, 57(9): 2411-2416 doi: 10.1109/TAC.2012.2188424 [19] Straka O, Dunik J, Simandl M. Unscented Kalman filter with advanced adaptation of scaling parameter. Automatica, 2014, 50(10): 2657-2664 doi: 10.1016/j.automatica.2014.08.030 [20] Vercauteren T, Wang X D. Decentralized sigma-point information filters for target tracking in collaborative sensor networks. IEEE Transactions on Signal Processing, 2005, 53(8): 2997-3009 doi: 10.1109/TSP.2005.851106 [21] Lee D J. Nonlinear estimation and multiple sensor fusion using unscented information filtering. IEEE Signal Processing Letters, 2008, 15: 861-864 doi: 10.1109/LSP.2008.2005447 [22] Liu G L, Worgotter F, Markelic I. Square-root sigma-point information filtering. IEEE Transactions on Automatic Control, 2012, 57(11): 2945-2950 doi: 10.1109/TAC.2012.2193708 [23] Li W Y, Wei G L, Han F, et al. Weighted average consensus-based unscented Kalman filtering. IEEE Transactions on Cybernetics, 2016, 46(2): 558-567 doi: 10.1109/TCYB.2015.2409373 [24] Liu G L, Tian G H. Square-root sigma-point information consensus filters for distributed nonlinear estimation. Sensors, 2017, 17(4): 800 doi: 10.3390/s17040800 [25] Reif K, Gunther S, Yaz E, et al. Stochastic stability of the discrete-time extended Kalman filter. IEEE Transactions on Automatic Control, 1999, 44(4): 714-728 doi: 10.1109/9.754809 [26] Li L, Xia Y Q. Stochastic stability of the unscented Kalman filter with intermittent observations. Automatica, 2012, 48(5): 978-981 doi: 10.1016/j.automatica.2012.02.014 [27] Yuan Y, Stan G B, Shi L, et al. Decentralised minimum-time consensus. Automatica, 2013, 49(5): 1227-1235 doi: 10.1016/j.automatica.2013.02.015 [28] Charalambous T, Yuan Y, Yang T, et al. Distributed finite-time average consensus in digraphs in the presence of time-delays. IEEE Transactions on Control of Network Systems, 2015, 2(4): 370-381 doi: 10.1109/TCNS.2015.2426732 [29] Yang T, Wu D, Sun Y N, et al. Minimum-time consensus-based approach for power system applications. IEEE Transactions on Industrial Electronics, 2016, 63(2): 1318-1328 doi: 10.1109/TIE.2015.2504050 [30] Xiao L, Boyd S. Fast linear iterations for distributed averaging. Systems & Control Letters, 2004, 53: 65-78 http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_0707.0500 [31] Horn R, Johnson C. Matrix Analysis. New York: Cambridge University Press, 1985 [32] Xiong K, Zhang H Y, Chan C W. Performance evaluation of UKF-based nonlinear filtering. Automatica, 2006, 42(2): 261-270 doi: 10.1016/j.automatica.2005.10.004 -

 下载:
下载:
图(3)
计量
- 文章访问数: 1309
- HTML全文浏览量: 88
- PDF下载量: 293
- 被引次数: 0
