

Cooperative Output Regulation of Heterogeneous Multi-agent Systems by Self-triggered
-
摘要: 本文针对线性异构多智能体系统,基于自适应自触发条件,分别设计了状态和输出反馈协同控制器.其中自适应控制策略可以避免使用多智能体系统的全局信息,从而实现分布式控制;自触发控制不仅可以避免对触发条件进行连续监测,还可以有效地降低网络的通信负载和控制器的更新次数,且不存在芝诺现象.最后通过4个跟随智能体和一个领导智能体进行了协同输出直角编队仿真实验,实现了多智能体系统对外部系统的渐近跟踪和干扰抑制,验证了结果的有效性.Abstract: This paper studies the cooperative output regulation problem for heterogeneous multi-agent systems. Based on the adaptive self-triggered conditions, a novel distributed adaptive cooperative output control mechanism is designed for state and output feedback, respectively. The adaptive control strategy can avoid using the global information of multi-agent systems and achieve distributed control. The self-triggering mechanism can not only avoid the continuous monitoring of the triggering conditions, but also can effectively reduce the network communication loads and the number of updates of the controller, and there is no Zeno phenomenon. Finally the right-angle formation simulation with four follower agents and a leader agent is presented, which can achieve the asymptotic tracking and disturbance rejection, and illustrate the effectiveness of main results.
-
近年来多智能体系统的分布式协同输出调节在多机器人和无人车等方面的应用中发挥着越来越重要的作用[1-3], 典型的协同输出调节问题包括一致性以及编队等问题的研究[4-10], 早期的输出调节的研究对象主要是单个智能体, 而协同输出调节针对的是多智能体系统, 控制目标是使所有的多智能体能够渐近跟踪外部参考输入信号和对外部干扰进行抑制.在协同输出调节问题中, 并非所有的智能体都能够接收到外部系统的信号, 因此不能采用集中式和分散式控制解决问题.浙江大学的Xiang等[11]首先提出了一种基于附加可检测条件的前馈控制用于控制同构线性多智能体系统. %在与此相关的研究文献中, 都假设智能体的系统矩阵完全可知, 然而在实际应用中, 由于各种原因, 智能体可能存在参数不确定的情况.根据这种情况, 人们开始研究多智能体的协同鲁棒输出调节问题.哈尔滨工业大学的Wang等[12]研究了固定拓扑下多智能体系统的分布式协同鲁棒输出调节问题, 并假设通信拓扑包含一个以节点0为根的有向生成树且没有环路.然而无环假设是一个较强的假设, 在此假设下, 这种控制策略不能应用到通信拓扑为无向图的多智能体系统中, 为了去掉此假设, 香港中文大学的Su等在文献[13]中研究了线性多智能体系统的协同输出调节问题, 提出了一种基于分布式观测器的方法, 在该控制器的作用下, 外部系统的信息能够传递给多智能体子系统, 然而控制器的设计需要用到全局通信拓扑的拉氏矩阵的最小非零特征值.于是, 为了解决这一问题, Li等在文献[14]中针对有向通信拓扑设计了分布式自适应输出调节控制机制.
在多智能体系统的实际应用中, 每个智能体进行通信以及信息的获取等活动时所需的能量都是从自身的微型传感设备所获取的, 但是每个智能体所能获取的能量是有限的, 所以减少智能体的通信能量损耗具有非常重要的意义.然而现有的许多控制器的设计中都需要智能体之间进行连续通信, 控制器也需要持续地更新, 因此, 为了减少智能体自身控制执行器的更新次数以及智能体之间的通信次数, 提出了事件触发控制策略.在事件触发传输机制中, 只有当系统的实际状态和参考值之间的差距大于一定的阈值时, 即系统发生较大变化时, 才对当前时刻状态进行更新, 因此能够有效降低计算机资源消耗.在基于系统状态已知的情况下, Guo等在文献[15]中提出了一种基于状态采样的事件触发控制机制, 通过使用这种方法, 能够将多智能体的一致性问题转化成一个时滞系统的稳定性问题.华中科技大学的Yin等[16]提出了一种分布式事件触发控制机制用于解决异构多智能体的一致性问题.然而在实际应用中, 系统状态往往很难测量, 于是, 同济大学的Zhang等[17]提出了一种基于状态观测器的输出反馈事件触发控制机制, 对状态不能直接测量的系统实现了状态反馈控制作用.
在现有相关文献研究的基础上, Yang等[18]设计了基于事件触发的多智能体系统的协同输出调节问题, 在事件触发条件上增加了自适应参数, 且智能体不需要连续知道相邻节点的状态信息.但在事件触发策略应用中, 需要时刻监测触发条件是否满足.基于这种情况, Hu等[19]研究了基于分布式观测器的事件触发协同输出调节问题, 提出了一种自触发控制策略.在自触发控制下, 智能体可以根据自身信息以及邻居节点的信息计算下一触发时刻, 从而避免了对事件触发条件的连续监测.
基于上述的研究, 本文以线性异构多智能体系统为研究对象, 设计了一种自触发规则分别用于状态反馈和输出反馈两种不同情况下的分布式自适应控制器中, 降低了多智能体系统中对对象监测的硬件要求, 为了使控制器在更新时只需知道局部信息就能达到控制目标, 引入了自适应控制策略, 从而可以避免使用多智能体系统的全局信息, 同时智能体不需要连续知道邻居节点的状态.
符号说明: $A^{\rm T}$表示$A$的转置; ${\bf R}^{n\times n}$表示$n\times n$维的实矩阵; $A\otimes B$表示矩阵$A$和$B$的Kronecker积; $\|A\|$表示$A$的范数; diag{$A_{1}, \cdots, A_{N}$}表示对角线上的项为$A_{i}$的分块对角矩阵, $i=1, \cdots, N$.
1. 图论知识及问题描述
1.1 图论知识
多智能体系统通信拓扑可用$\mathcal{G}=(\mathcal{V}, \mathcal{E}, \mathcal{A})$表示, 其中, $\mathcal{V}=\{1, 2, \cdots, N\}$代表节点数集, $\mathcal{E}\in\mathcal{V}\times\mathcal{V}$表示边, $\mathcal{A}$表示邻接矩阵, 若节点$i\in \mathcal{V}$和节点$j\in \mathcal{V}$相邻, 则用$(i, j)$表示节点$i$到节点$j$的边.在无向图中, $(i, j)$与$(j, i)$是等价的, 如果图中至少有一个节点能够通向其他任意一个节点, 则称该图中存在有向生成树.邻接矩阵$\mathcal{A}=[a_{ij}]\in{\bf R}^{n\times n}$, $a_{ij}=1$表示$i$和$j$互为邻居节点, 可以进行通信; 反之, 则$a_{ij}=0$.拉氏矩阵$\mathcal{L}=[l_{ij}]\in{\bf R}^{n\times n}$, 其中$l_{ii}=\sum\nolimits_{j\in\mathcal{N}_{i}}a_{ij}$, $l_{ij}=-a_{ij}$, $i\neq j$, $\mathcal{N}_{i}$表示节点$i$的邻居集.
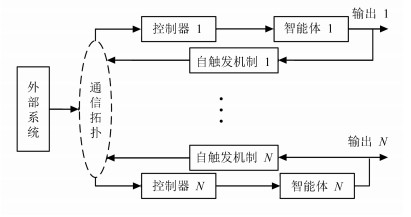
多智能体系统中包含外部系统时, 通信拓扑如图 1所示可描述为$\bar{\mathcal{G}}=(\bar{\mathcal{V}}, \bar{\mathcal{E}}, \bar{\mathcal{A}})$, 其中$\bar{\mathcal{V}}=\{0\}\cup\mathcal{V}$.节点$0$代表外部系统, 其他节点为${1, \cdots, N}$.其中节点$0$所代表的外部系统到跟随的多智能体子系统节点${1, \cdots, N}$是有向的, 而子系统节点${1, \cdots, N}$之间信息传递是无向的.对于节点$i\in \mathcal{V}$.如果节点$i$能够得到外部系统的信息, 则用$a_{i0}=1$表示; 否则$a_{i0}=0$.
引理[20]. 若图$\bar{\mathcal{G}}$包含一个以节点$0$为根的有向生成树, 则拉氏矩阵$\bar{\mathcal{L}}$只有一个零特征值且所有的非零特征值都含有正实部. $\bar{\mathcal{L}}$可表示为
$ \begin{align}\label{laplace matrix} \bar{\mathcal{L}}=\left[\begin{array}{cc} 0& \boldsymbol{0}_{1}\times N \\ \Delta\times\boldsymbol{1}_{N}& \mathcal{L}+\Delta \end{array}\right] \end{align} $
(1) 令$H=\mathcal{L}+\Delta$, 且$\Delta={\rm diag}\{a_{10}, \cdots, a_{N0}\}$.根据引理1, 如果$\bar{\mathcal{G}}$包含一个以节点$0$为根的有向生成树, 则$\mathcal{H}$是正定的.
1.2 问题描述
考虑$N$个线性异构多智能体和一个外部系统, 其中智能体的动力学方程为
$ \begin{align}\label{agent} &\dot{{\boldsymbol x}}_{i}(t)=A_{i}{\boldsymbol x}_{i}(t)+B_{i}{\boldsymbol u}_{i}(t)+E_{i}{\boldsymbol v}(t)\nonumber\\ &{\boldsymbol e}_{i}(t)=C_{i}{\boldsymbol x}_{i}(t)+D_{i}{\boldsymbol u}_{i}(t)+F_{i}{\boldsymbol v}(t)\nonumber\\ &{\boldsymbol y}_{mi}(t)=C_{mi}{\boldsymbol x}_{i}(t)+F_{mi}{\boldsymbol v}(t) \end{align} $
(2) 其中, ${\boldsymbol x}_{i}(t)\in{\bf R}^{n_{i}}$为智能体$i$的状态, ${\boldsymbol u}_{i}(t)\in{\bf R}^{m_{i}}$为智能体的控制输入, ${\boldsymbol e}_{i}\in {\bf R}^{q}$为智能体的被调输出, ${\boldsymbol y}_{mi}\in{\bf R}^{yi}$为智能体的测量输出. $A_{i}$, $B_{i}$, $E_{i}$, $C_{i}$, $D_{i}$, $F_{i}$, $C_{mi}$, $F_{mi}$为常数矩阵. ${\boldsymbol v}(t)\in{\bf R}^{p}$为被跟踪的外部信号或者需要抑制的扰动信号, 动态方程为
$ \begin{equation}\label{exosysytem} \dot{{\boldsymbol v}}(t)=S{\boldsymbol v}(t) \end{equation} $
(3) 其中, $S\in{\bf R}^{p\times p}$为常数矩阵.
在本文中, $\mathcal{G}$为包含$i\in \mathcal{V}$个节点的无向通讯拓扑图, 为了解决线性异构多智能体系统的协同输出调节问题, 提出如下假设:
假设1. $\mathcal{S}$矩阵的所有特征值的实部均为非负.
假设2. $(A_{i}, B_{i}), \ i\in \mathcal{V}$是稳定的.
假设3. $(C_{mi}, A_{i}), \ i\in \mathcal{V}$是可测的.
假设4. 如下线性矩阵方程存在唯一解$(X_{i}, U_{i})$
$ \begin{align}\label{supposion 4} &A_{i}X_{i}+B_{i}U_{i}+E_{i}=X_{i}S\nonumber\\ &C_{i}X_{i}+D_{i}U_{i}+F_{i}=0 \end{align} $
(4) 其中, $X_{i}\in{\bf R}^{n_{i}\times p}$, $U_{i}\in{\bf R}^{m_{i}\times p}$, $i=1, \cdots, N$.
假设5. $\bar{\mathcal{G}}$包含一个以节点0为根节点的有向生成树.
以上假设均不失一般性, 在现有的相关研究中均存在相同的假设条件.
定义1. 在通讯拓扑$\bar{\mathcal{G}}$下, 对于多智能体系统(2)和(3)设计的控制器, 满足:
1) 当${\boldsymbol v}(t)=0$, 这个闭环系统渐近稳定.
2) 对于任意初始条件, 总有$\lim\nolimits_{t\rightarrow\infty}{\boldsymbol e}_{i}(t)=0$.那么所设计的控制器能够解决多智能体系统(2)和(3)的协同输出调节问题.
系统的分布式控制结构如图 2所示, 每个智能体均有独立的控制器和触发规则, 通过通信拓扑进行信息交流, 其中一部分智能体能够获得外部系统的信息, 而另外一部分不能获得外部系统的信息, 因此为了解决多智能体系统的协同输出调节问题, 设计合理的控制器和触发规则就显得非常重要.
2. 基于自触发规则的控制器设计
2.1 基于状态反馈的控制器设计
当智能体状态可以测量得到时, 设计如下的分布式自适应控制器
$ \begin{align}\label{state controller} {\boldsymbol u}_{i}(t)=\, &K_{1i}{\boldsymbol x}_{i}(t)+K_{2i}{\boldsymbol \Xi}_{i}(t)\nonumber\\ \dot{{\boldsymbol \Xi}}_{i}(t)=\, &S{\boldsymbol \Xi}_{i}(t)+\Omega_{i}(t)P{\boldsymbol \Phi}_{i}(t)\nonumber\\ \dot{\Omega}_{i}(t)=\, &\gamma_{i}{\boldsymbol \Phi}_{i}^{\rm T}(t)\Gamma{\boldsymbol \Phi}_{i}(t), t\in[t_{k}^i, t_{k+1}^i) \end{align} $
(5) 其中, $\boldsymbol{\Phi}_{i}(t)=\sum\nolimits_{j=1}^Na_{ij}({\rm e}^{S(t-t_{k^{'}}^{j})}\boldsymbol{\Xi}_{j}(t_{k^{'}}^{j})-{\rm e}^{S(t-t_{k}^{i})}\times\boldsymbol{\Xi}_{i}(t_{k}^{i})$+$ a_{i0}({\rm e}^{St}{\boldsymbol v}(0)-{\rm e}^{S(t-t_{k}^{i})}{\boldsymbol \Xi}_{i}(t_{k}^{i}))$, $k^{'}(t)=\arg\max_{l\in {\bf N}}\{l \mid t\geq t_{l}^{i}\}$, $t\in[t_{k}^i, t_{k+1}^i)$, 本文中$k(t)$简写为$k$, 定义事件触发时刻$t_{k}^{i}:= inf\{t > t_{k-1}^{i} \mid f_{i}(t) > 0\} $, 其中, $f_{i}(\cdot)$为触发方程, $t_{0}^{i}, \cdots, t_{k}^{i}, \cdots $表示智能体$i$的触发时间序列. $K_{1i}\in{\bf R}^{m_{i}\times n_{i}}$, $K_{2i}\in{\bf R}^{m_{i}\times p}$为反馈增益, ${\boldsymbol \Xi}_{i}(t)\in{\bf R}^{p}$表示对外部信号的估计, $P\in{\bf R}^{p\times p}$为常数矩阵, 且$P>0$, $\gamma_{i}>0$为常数, $\Gamma\in{\bf R}^{p\times p}$为需要设计的增益矩阵, $\Omega_{i}(t)$为一个自适应参数, 初始值$\Omega_{i}(0)\geq 1$, 由于$\dot{\Omega}_{i}(t)\geq 0$, 所以可知$\Omega_{i}(t)$是一个单调不减的函数, 其中, 在$t\in [t_{k}^i, t_{k+1}^i)$, $\Omega_{i}(t_{k}^{i})$为常数, $i=1, \cdots, N$.
注1. $\boldsymbol{\Phi}_{i}(t)$中包含的是智能体$i$的邻居节点和领导者的通信拓扑信息, 即公式中的$a_{ij}$和$a_{i0}$, 无向图中, 若智能体$j$是智能体$i$邻居节点, 则$a_{ij}=1$, 同样, 若与领导者也相邻, 则$a_{i0}=1$; 否则, $a_{ij}$和$a_{i0}$均为0, 即代表不能获得除邻居节点之外其他节点的信息, 也就是说每个智能体是不需要知道Laplace矩阵这一全局信息的.
定义智能体$i$上一触发时刻和当前触发时刻信号的测量误差为
$ \begin{equation} \boldsymbol{\Xi}_{ei}(t)={\rm e}^{S(t-t_{k}^{i})}\boldsymbol{\Xi}_{i}(t_{k}^{i})-\boldsymbol{\Xi}_{i}(t), t\in [t_{k}^i, t_{k+1}^i) \end{equation} $
(6) 设计触发的关系方程为
$ \begin{align}\label{trriggering conditon} \zeta_{i}(\boldsymbol{\Xi}_{ei}(t), \boldsymbol{\Phi}_{i}(t))=\, &\theta_{i}(t)\boldsymbol{\Xi}_{ei}^{\rm T}(t)\Gamma\boldsymbol{\Xi}_{ei}(t)-\boldsymbol{\Phi}_{i}^{\rm T}(t)\Gamma\boldsymbol{\Phi}_{i}(t)\nonumber\\ \dot{\theta}_{i}(t)=\, &\beta_{i}\Omega_{i}(t)\boldsymbol{\Xi}_{ei}^{\rm T}(t)\Gamma\boldsymbol{\Xi}_{ei}(t) \end{align} $
(7) 其中, $\beta_{i}>0$是一个常数, $\theta_{i}(t)$为自触发方程的自适应参数, 满足$\theta_{i}(t)>0$, 因为$\dot{\theta}_{i}(t)\geq 0$, 所以$\theta_{i}(t)$是一个单调不减函数.当事件没有触发之前, $\zeta_{i}(t)\leq0$.令$\varpi_{i}(k)=\boldsymbol{\Phi}_{i}^{\rm T}(t)\Gamma\boldsymbol{\Phi}_{i}(t), t\in [t_{k}^i, t_{k+1}^i)$, 在$t\in [t_{k}^i, t_{k+1}^i)$时, 取$\theta_{i}(t)=\theta_{i}(t_{k}^i)$, $\Omega_{i}(t)=\Omega_{i}(t_{k}^i)$则在$i$触发之前的时间段内, $\theta_{i}(t)$, $\Omega_{i}(t)$均为常数, 然后对$\theta_{i}(t_{k}^{i})\boldsymbol{\Xi}_{ei}^{\rm T}(t)\Gamma\boldsymbol{\Xi}_{ei}(t)$进行求导
$ \begin{align}\label{trriggering conditon derivation} &\frac{{\rm d}\theta_{i}(t_{k}^{i})\boldsymbol{\Xi}_{ei}^{\rm T}(t)\Gamma\boldsymbol{\Xi}_{ei}(t)}{{\rm d}t}=\nonumber\\& \qquad 2\theta_{i}(t_{k}^{i})\boldsymbol{\Xi}_{ei}^{\rm T}(t)\Gamma(S\boldsymbol{\Xi}_{ei}(t)-\Omega_{i}(t_{k}^{i})P\boldsymbol{\Phi}_{i}(t))\leq\nonumber\\& \qquad (2\|S\|+\theta_{i}(t_{k}^{i})P\Omega_{i}(t_{k}^{i})+P\Omega_{i}(t_{k}^{i}))\varpi_{i}(k) \end{align} $
(8) 又由于在事件触发时, $\zeta_{i}(t)=0$, 即
$ \begin{equation} \theta_{i}(t)\boldsymbol{\Xi}_{ei}^{\rm T}(t)\Gamma\boldsymbol{\Xi}_{ei}(t)-\boldsymbol{\Phi}_{i}^{\rm T}(t)\Gamma\boldsymbol{\Phi}_{i}(t)=0\label{triggering condition} \end{equation} $
(9) 通过式(7)和(8)可以得到一个最小的触发时间关系:
$ \begin{align}\label{Zeno1} &t_{k+1}^{i}-t_{k}^{i}\geq \nonumber\\& \qquad\frac{\varpi_{i}(k)}{(2\|S\|+\theta_{i}(t_{k}^{i})P\Omega_{i}(t_{k}^{i})+P\Omega_{i}(t_{k}^{i}))\varpi_{i}(k)} \end{align} $
(10) 令$\tau_{k}^{i}=t_{k+1}^{i}-t_{k}^{i}$表示触发时间, 则由上式可得:
$ \begin{equation}\label{Zeno2} \tau_{k}^{i}\geq\frac{1}{2\|S\|+\theta_{i}(t_{k}^{i})P\Omega_{i}(t_{k}^{i})+P\Omega_{i}(t_{k}^{i})}>0 \end{equation} $
(11) 由不等式(11)可知, 触发的最小时间大于0, 即证得不存在芝诺现象.
注2. 芝诺现象指的是事件在有限时间内发生无限次触发, 当设计的自触发规则发生芝诺现象, 则代表此触发规则是不可行的.
定义 $\sigma_{i}(t)=(2\|S\|+\theta_{i}(t_{k}^{i})P\Omega_{i}(t_{k}^{i})+P\Omega_{i}(t_{k}^{i}))\varpi_{i}(k)$, 因此可以得出$\sigma_{i}(t)$的值为$\sigma_{i}(t_{k}^{i})$, $t\in[t_{k}^{i}, t_{k+1}^{i})$, 当$i$有邻居节点比其先触发, 此时$\sigma_{i}(t)$的值才会改变.
根据上述推导, 提出如下自触发算法规则:
步骤1. 定义智能体$i$上一触发时刻的时间为下一触发时刻的起始时刻, 定义$T_{i}^{0}=t_{k}^{i}$, 则通过计算得出触发时刻为: $T_{i}={\varpi_{i}(k)}/{\sigma_{i}(T_{i}^{0})}$;
步骤2. 判断智能体$i$的邻居节点此时有没有触发的, 若有触发的, 则$\varpi_{i}(k)=\varpi_{i}(k)-\sigma_{i}(t_{k+1}^{j})(t_{k+1}^{j}-T_{i}^{0})$, 其中, $t_{k+1}^{j}$为此时智能体$i$的邻居节点$j$的触发时刻, 令$T_{i}^{0}=t_{k+1}^{j}$, 返回步骤$1$重新计算; 若此时没有邻居节点触发, 则执行步骤$3$;
步骤3. 此时可以得到智能体$i$下一时刻的触发时间为:$t_{k+1}^{i}=T_{i}$.
注3. 与文献[19]相比, 本文的优势在于, 一是在设计反馈控制器时, 在式(5)中的控制器中增加了自适应参数$\Omega_{i}(t)$, 二是本文提出的自触发规则中也增加了自适应参数$\theta_{i}(t)$, 这两个自适应参数共同作用可以避免引入通信拓扑拉氏矩阵的最小非零特征值这一全局信息, 实现分布式控制.此外, 因为已经证明存在一个严格正定的时间间隔$\tau_{k}^{i}$, 即芝诺现象不存在, 所以上述自触发算法不会无限循环.
注4. 在此自触发规则作用下, 智能体$i$下一次的触发时刻可以通过自身的信息和邻居节点最近一次触发时刻的信息计算出来, 不需要对触发条件进行连续监测, 且只有在触发时刻, 智能体之间才会进行信息传输, 所以自触发能够有效地减少计算机资源损耗和通信代价.
通过将式(5)代入式(2)中, 可以得到智能体$i$的闭环系统为
$ \begin{align}\label{state Closed-loop system} \dot{{\boldsymbol x}}_{i}(t)=\, &(A_{i}+B_{i}K_{1i}){\boldsymbol x}_{i}(t)+B_{i}K_{2i}{\boldsymbol \Xi}_{i}(t)+E_{i}{\boldsymbol v}(t) \nonumber\\ \dot{{\boldsymbol \Xi}}_{i}(t)=\, &S{\boldsymbol \Xi}_{i}(t)+\Omega_{i}(t)P\sum\limits_{j\in \mathcal{N}_j}a_{ij}({\boldsymbol \Xi}_{ej}(t)-\nonumber\\&{\boldsymbol \Xi}_{ei}(t)+ {\boldsymbol \Xi}_{j}(t)-\boldsymbol{\Xi}_{i}(t))+\nonumber\\& \Omega_{i}(t)Pa_{i0}({\boldsymbol v}(t)-{\boldsymbol \Xi}_{ei}(t)-{\boldsymbol \Xi}_{i}(t))\nonumber\\ {\boldsymbol e}_{i}(t)=\, &(C_{i}+D_{i}K_{1i}){\boldsymbol x}_{i}(t)+ D_{i}K_{2i}{\boldsymbol \Xi}_{i}(t)+F_{i}{\boldsymbol v}(t) \end{align} $
(12) 令${\boldsymbol x}(t)=[{\boldsymbol x}_{1}^{\rm T}(t), \cdots, {\boldsymbol x}_{N}^{\rm T}(t)]^{\rm T}$, ${\boldsymbol e}(t)=[{\boldsymbol e}_{1}^{\rm T}(t), \cdots, \boldsymbol e_{N}^{\rm T}(t)]^{\rm T}$, ${\boldsymbol \Xi}(t)=[{\boldsymbol \Xi}_{1}^{\rm T}(t), \cdots, {\boldsymbol \Xi}_{N}^{\rm T}(t)]^{\rm T}$, ${\boldsymbol \Xi}_{e}(t)=[{\boldsymbol \Xi}_{e1}^{\rm T}(t), \cdots, {\boldsymbol \Xi}_{eN}^{\rm T}(t)]^{\rm T}$, 则整个闭环系统为:
$ \begin{align}\label{state whole system} \dot{{\boldsymbol x}}_{c}(t)=\, &\left[\begin{array}{cc} A+BK_{1} & BK_{2} \\ 0 & I_{N}\otimes S-\hat{\Omega}(t)H\otimes P \end{array}\right]\times\nonumber\\ &{\boldsymbol x}_{c}(t)+\left[\begin{array}{c} 0 \\ -\hat{\Omega}(t)H\otimes P \end{array}\right]{\boldsymbol \Xi}_{e}(t)+\nonumber\\ & \left[\begin{array}{c} E \\ \hat{\Omega}(t)H\otimes P \end{array}\right](\bf{1}_{N}\otimes {\boldsymbol v}(t)) \nonumber\\ {\boldsymbol e}(t)=\, &\left[\begin{array}{cc} C+DK_{1} & DK_{2} \end{array}\right]{\boldsymbol x}_{c}(t)+F({\boldsymbol 1}_{N}\otimes {\boldsymbol v}(t)) \end{align} $
(13) 其中, ${\boldsymbol x}_{c}(t)=\left[{\boldsymbol x}^{\rm T}(t) \ {\boldsymbol \Xi}^{\rm T}(t)\right]^{\rm T}$, $A={\rm diag}\{A_{1}, \cdots, $ $A_{N}\}$, $B={\rm diag}\{B_{1}, \cdots, B_{N}\}$, $C={\rm diag}\{C_{1}, $ $\cdots, $ $C_{N}\}$, $D={\rm diag}\{D_{1}, \cdots, D_{N}\}$, $E={\rm diag}\{E_{1}, \cdots, E_{N}\}$, $F={\rm diag}\{F_{1}, \cdots, F_{N}\}$, $K_{1}={\rm diag}\{K_{11}, \cdots, K_{1N}\}$, $K_{2}={\rm diag}\{K_{21}, \cdots, K_{2N}\}$, $\widehat{\Omega}(t)={\rm diag}\{\Omega_{1}(t), \cdots, \Omega_{N}(t)\}$.
在此自触发规则下, 提出如下基于状态反馈的触发控制策略用来解决基于状态反馈的协同输出调节问题.
定理1. 假设$1, 2, 4, 5$成立, $K_{1i}$的取值满足使得$ A_{i}+B_{i}K_{1i}$是Hurwitz矩阵, $K_{2i}=U_{i}-K_{1i}X_{i}$, $P>0$是Riccati方程$PS+S^{\rm T}P-\delta_{1}PP+\delta I=0$的解, 在自触发规则和控制器(5)的共同作用下, 若满足:
1) 当${\boldsymbol v}(t)=0$时, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol x}_{i}(t)=0$, $\lim\nolimits_{t\rightarrow\infty}\boldsymbol{\Xi}_{i}(t)=0$, $i=1, \cdots, N$, 且当时间$t$趋于无穷时, 自适应参数$\Omega_{i}(t)$和$\theta_{i}(t)$趋于某一常数.
2) 对于任意初始条件${\boldsymbol x}_{i}(0)$, ${\boldsymbol \Xi}_{i}(0)$以及${\boldsymbol v}(0)$, 被调输出最终都将趋于0, 即$\lim\nolimits_{t\rightarrow\infty}{\boldsymbol e}_{i}(t)=0$, $i=1, \cdots, N$.
则多智能体系统(2)和(3)能够实现协同输出调节.
证明. 首先证明定理$1$的第一部分, 因为$A_{i}+B_{i}K_{1i}$是Hurwitz矩阵, 那么这个闭环系统的稳定性与下面的系统(14)的稳定性是等价的.
$ \begin{align}\label{Equivalent system} \dot{{\boldsymbol \Xi}}(t)=\, &(I_{N}\otimes S-\widehat{\Omega}(t)H\otimes P){\boldsymbol \Xi}(t)-(\widehat{\Omega}(t)H\otimes\nonumber\\ &P){\boldsymbol \Xi}_{e}(t)+(\widehat{\Omega}(t)H\otimes P)({\boldsymbol 1}_{N}\otimes {\boldsymbol v}(t)) \end{align} $
(14) 令$\bar{{\boldsymbol v}}_{i}(t)=\bf{\Xi}_{i}(t)-{\boldsymbol v}(t)$, $\bar{{\boldsymbol v}}(t)=\left[\bar{{\boldsymbol v}}_{1}^{\rm T}(t), \cdots, \bar{{\boldsymbol v}}_{N}^{\rm T}(t)\right]^{\rm T}$, ${\boldsymbol \Xi}_{e}(t)$=$\left[{\boldsymbol \Xi}_{e1}^{\rm T}(t), \ \cdots, {\boldsymbol \Xi}_{eN}^{\rm T}(t)\right]^{\rm T}$, 其扩维形式可以写为: $\bar{{\boldsymbol v}}(t)={\boldsymbol \Xi}(t)-{\boldsymbol 1}_{N}\otimes {\boldsymbol v}(t)$, 对$\bar{{\boldsymbol v}}(t)$进行求导可以得到
$ \begin{equation}\label{Expansion of the form} \dot{\bar{{\boldsymbol v}}}(t)=(I_{N}\otimes S-\widehat{\Omega}(t)H\otimes P)\bar{{\boldsymbol v}}(t)-(\widehat{\Omega}(t)H\otimes P){\boldsymbol \Xi}_{e}(t) \end{equation} $
(15) 为了证明闭环系统的稳定性, 选取Lyapunov函数
$ \begin{align}\label{Lyapunov} V(t)=\, &\sum\limits_{i=1}^N\bar{{\boldsymbol v}}_{i}^{\rm T}(t)(2(H+H^{\rm T})\otimes P)\bar{{\boldsymbol v}}_{i}(t)+\nonumber\\ &\sum\limits_{i=1}^N\frac{(\Omega_{i}(t)-c_{1})^{2}}{2\gamma_{i}}+\sum\limits_{i=1}^N\frac{(\theta_{i}(t)-c_{2})^{2}}{2\beta_{i}} \end{align} $
(16) Lyapunov函数可以分为三部分, 即
$ \begin{align}\label{1} V_{1}(t)&=\sum\limits_{i=1}^N\bar{{\boldsymbol v}}_{i}^{\rm T}(t)(2(H+H^{\rm T})\otimes P)\bar{{\boldsymbol v}}_{i}(t)\nonumber\\ V_{2}(t)&=\sum\limits_{i=1}^N\frac{(\Omega_{i}(t)-c_{1})^{2}}{2\gamma_{i}}\nonumber\\ V_{3}(t)&=\sum\limits_{i=1}^N\frac{(\theta_{i}(t)-c_{2})^{2}}{2\beta_{i}} \end{align} $
(17) 然后分别对其进行求导, $c_{1}, c_{2}$都是常数.首先对$V_{1}(t)$进行求导, $t\in[t_{k}^{i}, t_{k+1}^{i})$, 得
$ \begin{align}\label{V1 Derivatives} \dot{V}_{1}(t)=\, &\bar{{\boldsymbol v}}^{\rm T}(t)(2(H+H^{\rm T})\otimes (PS+S^{\rm T} P)-\nonumber\\ &8H^{\rm T}\widehat{\Omega}(t)H\otimes PP)\bar{{\boldsymbol v}}(t)-\nonumber\\ &8{\boldsymbol \Xi}_{e}^{\rm T}(t)(H^{\rm T}\widehat{\Omega}(t)H\otimes PP)\bar{{\boldsymbol v}}(t)\leq\nonumber\\ &\bar{{\boldsymbol v}}^{\rm T}(t)(2(H+H^{\rm T})\otimes(PS+S^{\rm T} P)-\nonumber\\ &4H\widehat{\Omega}(t)H\otimes PP)\bar{{\boldsymbol v}}(t)+\nonumber\\ &4{\boldsymbol \Xi}_{e}^{\rm T}(t)(H^{\rm T}\widehat{\Omega}(t)H\otimes PP){\boldsymbol \Xi}_{e}(t) \end{align} $
(18) 然后对$V_{2}(t)$进行求导得
$ \begin{equation}\label{V2} \dot{V}_{2}(t)=\sum\limits_{i=1}^N(\Omega_{i}(t)-c_{1}){\boldsymbol \Phi}_{i}^{\rm T}(t)\Gamma{\boldsymbol \Phi}_{i}(t) \end{equation} $
(19) 最后, 同样可得$V_{3}(t)$的导数:
$ \begin{equation}\label{V3} \dot{V}_{3}(t)=\sum\limits_{i=1}^N(\theta_{i}(t)-c_{2}){\boldsymbol \Xi}_{ei}^{\rm T}(t)\Gamma{\boldsymbol \Xi}_{ei}(t) \end{equation} $
(20) 把三部分导数相加得:
$ \begin{align}\label{V} \dot{V}(t)\leq\, &\bar{{\boldsymbol v}}^{\rm T}(t)(2(H+H^{\rm T})\otimes(PS+S^{\rm T} P)-\nonumber\\ &4H\hat{\Omega}(t)H\otimes PP)\bar{{\boldsymbol v}}(t)+\nonumber\\ &4{\boldsymbol \Xi}_{e}^{\rm T}(t)(H^{\rm T}\hat{\Omega}(t)H\otimes PP){\boldsymbol \Xi}_{e}(t)+\nonumber \nonumber\\ &\sum\limits_{i=1}^N(\Omega_{i}(t)-c_{1}){\boldsymbol \Phi}_{i}^{\rm T}(t)\Gamma{\boldsymbol \Phi}_{i}(t)+\nonumber\\ &\sum\limits_{i=1}^N(\theta_{i}(t)-c_{2}){\boldsymbol \Xi}_{ei}^{\rm T}(t)\Gamma{\boldsymbol \Xi}_{ei}(t) \end{align} $
(21) 因为$\Omega_{i}(t)\geq1$, 且是触发时刻所在区间求导, 所以根据触发条件$\zeta_{i}(t)\leq0$, $\dot{V}(t)$可变换为
$ \begin{align}\label{V calculation} \dot{V}(t)&\leq\bar{{\boldsymbol v}}^{\rm T}(t)(2(H+H^{\rm T})\otimes(PS+S^{\rm T} P)-\nonumber\\ &4H\hat{\Omega}(t)H\otimes PP)\bar{{\boldsymbol v}}(t)+4\boldsymbol{\Xi}_{e}^{\rm T}(t)(4H^{\rm T}\hat{\Omega}(t)H-\nonumber\\ &c_{2}\hat{\Omega}(t)){\boldsymbol \Xi}_{e}(t)+\sum\limits_{i=1}^N(2\Omega_{i}(t)-c_{1}){\boldsymbol \Phi}_{i}^{\rm T}(t)\Gamma{\boldsymbol \Phi}_{i}(t) \end{align} $
(22) 又由于
$ \begin{align}\label{simple} {\boldsymbol \Phi}_{i}^{\rm T}(t)\Gamma{\boldsymbol \Phi}_{i}(t)\leq\, &2{\boldsymbol \Xi}_{e}^{\rm T}(t)(H^{\rm T} H\otimes PP){\boldsymbol \Xi}_{e}(t)+\nonumber\\ &2\bar{{\boldsymbol v}}^{\rm T}(t)(H^{\rm T} H\otimes PP)\bar{{\boldsymbol v}}(t) \end{align} $
(23) 综上可以得到Lyapunov函数为
$ \begin{align}\label{Vfinal} \dot{V}(t)\leq\, &\bar{{\boldsymbol v}}^{\rm T}(t)(2(H+H^{\rm T})\otimes(PS+S^{\rm T} P)-\nonumber\\ &2c_{1}(H^{\rm T} H\otimes PP)\bar{{\boldsymbol v}}(t)+{\boldsymbol \Xi}_{e}^{\rm T}(t)((4H^{\rm T} H\otimes\nonumber\\ &PP-c_{2})\widehat{\Omega}(t)-2c_{1}H^{\rm T} H\otimes PP){\boldsymbol \Xi}_{e}(t) \end{align} $
(24) 令$\delta_{0}=\lambda_{\rm min}(H^{\rm T} H)$, $\hat{\lambda}_{N}=\lambda_{\rm max}(H^{\rm T}+H)$, 则式(24)可化简为
$ \begin{align}\label{Vfinal1} \dot{V}(t)\leq\, &2\hat{\lambda}_{N}\bar{{\boldsymbol v}}^{\rm T}(t)({\boldsymbol 1}_{N}\otimes(PS+S^{\rm T} P)-\nonumber\\ &2\frac{c_{1}}{\hat{\lambda}_{N}}(\delta_{0}\otimes PP))\bar{{\boldsymbol v}}(t)+\nonumber\\ &{\boldsymbol \Xi}_{e}^{\rm T}(t)(((4-\frac{c_{2}}{\delta_{0}})\widehat{\Omega}(t)-2c_{1}\delta_{0})\otimes PP){\boldsymbol \Xi}_{e}(t) \end{align} $
(25) 当$c_{1}\geq(\hat{\lambda}_{N}\delta_{1})/(2\delta_{0})$, $c_{2}\geq4\delta_{0}$时, 因为$P$是Riccati方程$PS+S^{\rm T} P-\delta_{1}PP=-\delta I$的解, 所以$\dot{V}(t)\leq2\hat{\lambda}_{N}\sum\nolimits_{i=1}^N\bar{{\boldsymbol v}}_{i}^{\rm T}(t)((PS+S^{\rm T} P)-\delta_{1}PP)\bar{{\boldsymbol v}}_{i}(t)$, 即:当$\boldsymbol{v}(t)=0$时, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol \Xi}_{i}(t)=0$, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol x}_{i}(t)=0$, $i=1, \cdots, N$, 与此同时, ${\boldsymbol \Xi}_{i}(t)$, $\theta_{i}(t)$都将随时间$t$的变化趋于有界稳态值.
接下来, 将证明定理1的第二部分.由假设4, 同时令${\boldsymbol \varepsilon}_{i}(t)={\boldsymbol x}_{i}(t)-X_{i}{\boldsymbol v}(t)$, 可以得到如下表达式
$ \begin{align}\label{second part} \dot{{\boldsymbol \varepsilon}}_{i}(t) =\, &(A_{i}+B_{i}K_{1i}){\boldsymbol \varepsilon}_{i}(t)+B_{i}K_{2i}\bar{{\boldsymbol v}}(t) \end{align} $
(26) 通过已证的定理1的第一部分可知$\lim\nolimits_{t\rightarrow\infty}\bar{{\boldsymbol v}}_{i}(t)=0$, 因此${\boldsymbol \varepsilon}_{i}(t)$的稳定性是与$(A_{i}+B_{i}K_{1i}){\boldsymbol \varepsilon}_{i}(t)$等价的, 由从假设2可知, $A_{i}+B_{i}K_{1i}$是Hurwitz稳定的, 因此可以知道, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol \varepsilon}_{i}(t)=0$.
智能体$i$的被调输出为
$ \begin{align}\label{regulated out} {\boldsymbol e}_{i}(t)=\, &(C_{i}+D_{i}K_{1i}){\boldsymbol \varepsilon}_{i}(t)+D_{i}K_{2i}\bar{{\boldsymbol v}}(t)+\nonumber\\ &(C_{i}X_{i}+D_{i}U_{i}+F_{i}){\boldsymbol v}(t) \end{align} $
(27) 由于$\lim\nolimits_{t\rightarrow\infty}\bar{{\boldsymbol v}}_{i}(t)=0$, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol \varepsilon}_{i}(t)=0$, 在根据假设4的第二个方程, 所以可以推导出: $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol e}_{i}(t)=(C_{i}X_{i}+D_{i}U_{i}+F_{i}){\boldsymbol v}(t)=0$.
2.2 基于输出反馈的控制器设计
在基于状态反馈的控制器设计中, 每个智能体本身的状态是可以获得的, 但是在实际的应用中, 系统状态一般是很难通过测量得到, 因此为了解决这个问题, 本节设计了基于输出反馈的分布式自适应控制器, 如下所示.
$ \begin{align} \label{output controller} {\boldsymbol u}_{i}(t)=\, &K_{1i}{\boldsymbol \Upsilon}_{i}(t)+K_{2i}{\boldsymbol \Xi}_{i}(t)\nonumber\\ \dot{{\boldsymbol \Xi}}_{i}(t)=\, &S{\boldsymbol \Xi}_{i}(t)+\Omega_{i}(t) P{\boldsymbol \Phi}_{i}(t)\nonumber\\ \dot{{\boldsymbol \Upsilon}}_{i}(t)=\, &A_{i}{\boldsymbol \Upsilon}_{i} (t)+B_{i}{\boldsymbol u}_{i}(t)+E_{i}{\boldsymbol \Xi}_{i}(t)+\nonumber\\ &Q_{i}({\boldsymbol y}_{mi}(t)-C_{mi}{\boldsymbol \Upsilon}_{i} (t)-F_{mi}{\boldsymbol \Xi}_{i}(t))\nonumber\\ \dot{\Omega}_{i}(t)=\, &\gamma_{i}{\boldsymbol \Phi}_{i}^{\rm T}(t)\Gamma{\boldsymbol \Phi}_{i}(t), t\in[t_{k}^i, t_{k+1}^i) \end{align} $
(28) 其中, ${\boldsymbol \Phi}_{i}(t)$的定义与式(5)的定义一样, ${\boldsymbol \Upsilon}_{i}(t)\in{\bf R}^{n_{i}}$是节点状态的估计值, $Q_{i}\in{\bf R}^{n_{i}\times p_{i}}$是常数增益矩阵.把式(28)代入式(2)中, 单个节点$i$的闭环系统如式(29)所示.
$ \begin{align}\label{output Closed-loop system} \dot{{\boldsymbol x}}_{i}(t)=\, &A_{i}{\boldsymbol x}_{i}(t)+B_{i}K_{1i}{\boldsymbol \Upsilon}_{i}(t)+E_{i}{\boldsymbol v}(t)\nonumber\\ \dot{{\boldsymbol \Upsilon}}_{i}(t)=\, &(A_{i}+B_{i}K_{1i}-Q_{i}C_{mi}) {\boldsymbol \Upsilon}_{i}(t)+\nonumber\\ &(B_{i}K_{2i}+E_{i}-Q_{i}F_{mi}){\boldsymbol \Xi}_{i}(t)+\nonumber\\ &Q_{i}C_{mi}{\boldsymbol x}_{i}(t)+Q_{i}F_{mi}{\boldsymbol v}(t)\nonumber\\ \dot{{\boldsymbol \Xi}}_{i}(t)=\, &S{\boldsymbol \Xi}_{i}(t)+\Omega_{i} (t)P\sum\limits_{j\in \mathcal{N}_j}a_{ij}({\boldsymbol \Xi}_{ej}(t)-\nonumber\\ &{\boldsymbol \Xi}_{ei}(t)+{\boldsymbol \Xi}_{j}(t)-{\boldsymbol \Xi}_{i}(t))+\nonumber\\ &\Omega_{i}(t)Pa_{i0}({\boldsymbol v}(t)-{\boldsymbol \Xi}_{ei}(t)- {\boldsymbol \Xi}_{i}(t))\nonumber\\ {\boldsymbol e}_{i}(t)=\, &C_{i}{\boldsymbol x}_{i}(t)+D_{i}K_{1i}{\boldsymbol \Upsilon}_{i}(t)+\nonumber\\ &D_{i}K_{2i}{\boldsymbol \Xi}_{i}(t)+F_{i}{\boldsymbol v}(t) \end{align} $
(29) 令$Q={\rm diag}\{Q_{1}, \cdots, Q_{N}\}$, $C_{m}={\rm diag}\{C_{1m}, \cdots, \\C_{mN}\}$, $F_{m}={\rm diag}\{F_{m1}, \cdots, F_{mN}\}$, 则整个系统的闭环形式为
$ \begin{align}\label{output whole system} \dot{{\boldsymbol x}}(t)=\, &A{\boldsymbol x}(t)+BK_{1}{\boldsymbol \Upsilon}(t)+ BK_{2}{\boldsymbol \Xi}(t)+\nonumber\\ &E({\boldsymbol 1}_{N}\otimes {\boldsymbol v}(t))\nonumber\\ \dot{{\boldsymbol \Xi}}(t)=\, &(I_{N}\otimes S-\widehat{\Omega}(t) H\otimes P){\boldsymbol \Xi}(t)+\nonumber\\ &(\widehat{\Omega}(t)H\otimes P)({\boldsymbol 1}_{N}\otimes {\boldsymbol v}(t)) -\nonumber\\ &(\widehat{\Omega}(t)H\otimes P){\boldsymbol \Xi}_{e}(t)\nonumber\\ \dot{{\boldsymbol \Upsilon}}(t)=\, &(A+BK_{1}-QC_{m}){\boldsymbol \Upsilon}(t)+\nonumber\\ &(BK_{2}+E-QF_{m}){\boldsymbol \Xi}(t)+\nonumber\\ &QC_{m}{\boldsymbol x}(t)+QF_{m}({\boldsymbol 1}_{N}\otimes {\boldsymbol v}(t))\nonumber\\ {\boldsymbol e}(t)=\, &C{\boldsymbol x}(t)+DK_{1}{\boldsymbol \Upsilon}(t)+ DK_{2} {\boldsymbol \Xi}(t)+\nonumber\\ &F({\boldsymbol 1}_{N}\otimes {\boldsymbol v}(t)) \end{align} $
(30) 定理2. 在假设1$\, \sim\, $5成立的条件下, $K_{1i}$和$Q_{i}$增益矩阵的取值分别使$A_{i}+B_{i}K_{1i}$和$A_{i}-Q_{i}C_{mi}$是Hurwitz矩阵, 其中$K_{2i}=U_{i}-K_{1i}X_{i}$, 在自触发规则和控制器(28)的共同作用下, 若满足
1) 当${\boldsymbol v}(t)=0$时, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol x}_{i}(t)=0$, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol \Xi}_{i}(t)=0$, $\lim\nolimits_{t\rightarrow\infty}\boldsymbol{\Upsilon}_{i}(t)=0$, $i=1, \cdots, N$, 且当时间$t$趋于无穷时, 自适应参数$\Omega_{i}(t)$和$\theta_{i}(t)$趋于某一常数.
2) 对于任意初始条件${\boldsymbol x}_{i}(0)$, ${\boldsymbol \Xi}_{i}(0)$, ${\boldsymbol \Upsilon}_{i}(0)$以及${\boldsymbol v}(0)$, 被调输出最终都将趋于0, 即$\lim\nolimits_{t\rightarrow\infty}{\boldsymbol e}_{i}(t)=0$, $i=1, \cdots, N$.
则在智能体状态未知的情况下, 多智能体系统(2)和(3)也能够实现协同输出调节.
证明. 令$\breve{{\boldsymbol x}}_{c}(t)=\left[{\boldsymbol x}^{\rm T}(t) \ {\boldsymbol \Upsilon}^{\rm T}(t) {\boldsymbol \Xi}^{\rm T}(t)\right]^{\rm T}$, 则式(30)的闭环系统形式可以写成如下形式
$ \begin{align}\label{output whole system1} \dot{\breve{{\boldsymbol x}}}_{c}(t)=\, &\left[\begin{array}{cc} \breve{A}_{c1} & \breve{A}_{c2} \\ R_{1} & I_{N}\otimes S- \widehat{\Omega}(t)H\otimes I_{q} \end{array}\right] \breve{{\boldsymbol x}}_{c}(t)+\nonumber\\ &\left[\begin{array}{c} R_{2} \\ -\hat{\Omega}(t)H\otimes P \end{array}\right]{\boldsymbol \Xi}_{e}(t)+\nonumber\\ &\left[\begin{array}{c} \breve{E}_{c} \\ \hat{\Omega}(t)H\otimes P \end{array}\right]({\boldsymbol 1}_{N}\otimes {\boldsymbol v}(t)) \end{align} $
(31) 其中, $\breve{A}_{c1}=\left[{array}{cc} A & BK_{1} \\ QC_{m} & A+BK_{1}-QC_{m} {array}\right]$, $\breve{E}_{c}=\left[{array}{cc} E \\ QF_{m} {array}\right] $, $\breve{A}_{c2}=\left[{array}{cc} BK_{2} \\ E+BK_{2}-QC_{m} {array}\right]$, $R_{1}=\left[{array}{cc} 0 & 0 {array}\right] $, $R_{2}=\left[{array}{c} 0 \\ 0 {array} \right] $.令$\bar{A}_{c}=\left[{array}{cc} A+BK_{1}&BK_{1} \\ 0&A-QC_{m} {array}\right]$, 则存在酉矩阵$T^{-1}\breve{A}_{c1}T=\bar{A}_{c}$, 因此$\breve{A}_{c1}$和$\bar{A}_{c}$是相似矩阵.选取$K_{1i}$和$Q_{i}$分别使$A_{i}+B_{i}K_{1i}$和$A_{i}-Q_{i}C_{mi}$是Hurwitz矩阵, 因此可以知道$\bar{A}_{c1}$是Hurwitz矩阵.又$\breve{A}_{c1}$和$\bar{A}_{c}$是相似矩阵, 所以$\breve{A}_{c1}$也是Hurwitz矩阵, 所以闭环系统(31)的稳定性等价于式(13)的稳定性, 选取如方程(16)所示的Lyapunov方程, 证明过程如定理1证明所示, 于是可以得到, 因此可以推出当${\boldsymbol v}(t)=0$时, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol \Xi}_{i}(t)=0$, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol x}_{i}(t)=0$, $\lim\nolimits_{t\rightarrow\infty}{\boldsymbol \Upsilon}_{i}(t)=0$, $i=1, \cdots, N$, 当时间$t$趋于无穷时, 自适应参数$\Omega_{i}(t)$和$\theta_{i}(t)$渐近趋于某一常数.
下面对定理$2$的第二部分进行证明.令${\boldsymbol \varsigma}_{i}(t)={\boldsymbol x}_{i}(t)-X_{i}{\boldsymbol v}(t)$, $\tilde{{\boldsymbol \Upsilon}}_{i}(t)={\boldsymbol \Upsilon}_{i}(t)-X_{i}{\boldsymbol v}(t)$, $\bar{{\boldsymbol v}}_{i}(t)={\boldsymbol \Xi}_{i}(t)-{\boldsymbol v}(t)$, 同样根据假设4得
$ \begin{align}\label{output second part} \dot{\boldsymbol{\varsigma}}_{i}(t)=\, &A_{i}\boldsymbol{\varsigma}_{i}(t)+ B_{i}K_{1i}\tilde{\boldsymbol{\Upsilon}}_{i}(t)+B_{i}K_{2i} \bar{{\boldsymbol v}}_{i}(t)\nonumber\\ \dot{\tilde{{\boldsymbol \Upsilon}}}_{i}(t)=\, &Q_{i}C_{mi}{\boldsymbol \varsigma}_{i}(t)+(B_{i}K_{2i}+E_{i})\bar{{\boldsymbol v}}_{i}(t)+\nonumber\\ &(A_{i}+B_{i}K_{1i}-Q_{i}C_{mi})\tilde{{\boldsymbol \Upsilon}}_{i}(t) \end{align} $
(32) 令$A_{ci}=\left[{array}{cc} A_{i} & B_{i}K_{1i} \\ Q_{i}C_{mi} & A_{i}+B_{i}K_{1i}-Q_{i}C_{mi} {array}\right]$, $\bar{A}_{ci}=\left[{array}{cc} A_{i}+B_{i}K_{1i}& B_{i}K_{1i} \\ 0& A_{i}-Q_{i}C_{mi} {array}\right]$, $\boldsymbol{\varsigma}_{ci}(t)=\left[{\boldsymbol \varsigma}_{i}^{\rm T}(t) \ \tilde{{\boldsymbol \Upsilon}}_{i}^{\rm T}(t)\right]^{\rm T}$, 由之前的证明可知, $\lim\nolimits_{t\rightarrow\infty}\bar{{\boldsymbol v}}_{i}(t)=0$, 因此上面两式的稳定性与$\dot{{\boldsymbol \varsigma}}_{ci}(t)=A_{ci}{\boldsymbol \varsigma}_{ci}(t)$的稳定性是等价的.则存在酉矩阵满足$T_{i}^{-1}A_{ci}T_{i}=\bar{A}_{ci}$, 那么可以推出矩阵$A_{ci}$和$\bar{A}_{ci}$相似, 又因为$A_{i}+B_{i}K_{1i}$和$A_{i}-Q_{i}C_{mi}$是Hurwitz矩阵, 所以$\bar{A}_{ci}$是Hurwitz矩阵, 因为$A_{ci}$与$\bar{A}_{ci}$是相似矩阵, 同样可以得到$A_{ci}$也是Hurwitz矩阵, 即可以得到$\lim\nolimits_{t\rightarrow\infty}{\boldsymbol \varsigma}_{ci}(t)=0$.
智能体$i$的被调输出为
$ \begin{align}\label{output second part of e} {\boldsymbol e}_{i}(t)=\, &\left[C_{i}\quad D_{i}K_{1i}\right]{\boldsymbol \varsigma}_{ci}(t)+D_{i}K_{2i}\bar{{\boldsymbol v}}_{i}(t)+\nonumber\\ &(C_{i}X_{i}+D_{i}U_{i}+F_{i}){\boldsymbol v}(t) \end{align} $
(33) 因为$\lim\nolimits_{t\rightarrow\infty}{\boldsymbol \varsigma}_{ci}(t)=0$, $\lim\nolimits_{t\rightarrow\infty}\bar{{\boldsymbol v}}_{i}(t)=0$, 再根据假设4, 可以推出$\lim\nolimits_{t\rightarrow\infty}{\boldsymbol e}_{i}(t)=0$.
3. 仿真结果
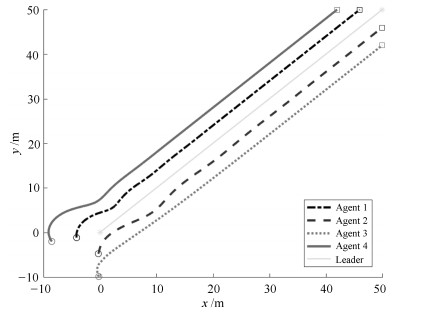
本节根据提出的定理, 采用基于输出反馈的控制器(28)和所提出的自触发规则对$4$个跟随机器人(2)和$1$个领导机器人(3)组成的多智能体系统进行直角编队仿真实验[21], $4$个非完整性移动跟随机器人的动力学模型为
$ \begin{align*}\nonumber \dot{{\boldsymbol x}}_{i}(t)&=\left[\begin{array}{ccc} 0 & 1 & 0 \\ 0 & 0 & c_{i} \\ 0 & d_{i} & -a_{i} \end{array}\right]{\boldsymbol x}_{i}(t)+\left[\begin{array}{ccc} 0\\ 0\\ b_{i} \end{array}\right]{\boldsymbol u}_{i}(t)+\nonumber\\ &\left[\begin{array}{ccc} -0.5i & 0 \\ -1 & 0.5i \\ 0 & 0 \end{array}\right]{\boldsymbol v}(t)\\ {\boldsymbol e}_{i}(t)&=\left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \end{array} \right]{\boldsymbol x}_{i}(t)+\left[\begin{array}{cc} -1 & 0 \\ -0.5i & -1 \end{array}\right]{\boldsymbol v}(t)\\ {\boldsymbol y}_{mi}(t)&=\left[\begin{array}{ccc} 1 & 0 & 0 \\ 0 & 1 & 0 \end{array} \right]{\boldsymbol x}_{i}(t) \end{align*} $
选取$D_{mi}=D_{i}=0_{2\times 1}$, $F_{mi}=0_{2\times 2}$, $i=1, 2, 3, 4$.给定参数$[a_{1}, b_{1}, c_{1}, d_{1}]=[1, 1, 1, 0]$, $[a_{2}, b_{2}, c_{2}, d_{2}]=[10, 2, 1, 0]$, $[a_{3}, b_{3}, c_{3}, d_{3}]=[2, 1, 1, 10]$, $[a_{4}, b_{4}, c_{4}, d_{4}]=[2, 1, 1, 1]$.
领导者的动力学模型为
$ \begin{equation} \dot{{\boldsymbol v}}(t)=\left[\begin{array}{cc} 0&1\\ 0&0\\ \end{array}\right]{\boldsymbol v}(t)\nonumber \end{equation} $
各智能体的初始状态为: ${\boldsymbol v}(0)=[0.7984, 0.9430]^{\rm T}, $ ${\boldsymbol x}_1(0)=[0.6551, 0.1626, 0.4218]^{\rm T}$, ${\boldsymbol x}_2(0)=$ $[0.4984, 0.9597, 0.9157]^{\rm T}$, ${\boldsymbol x}_3(0)=[0.5853, 0.2238, $ $0.7922]^{\rm T}$, ${\boldsymbol x}_4(0)=[0.2551, 0.5060, 0.9595]^{\rm T}$; 观测器${\boldsymbol \Upsilon}_{i}(t)$的初始状态为: ${\boldsymbol \Upsilon}_{1}(0)=[0.7463, 0.0103, $ $ 0.0484]^{\rm T}$, ${\boldsymbol \Upsilon}_{2}(0)=[0.6679, 0.6035, 0.5261]^{\rm T}$, ${\boldsymbol \Upsilon}_{3}(0)$ $=[0.7297, 0.7073, 0.7814]^{\rm T}$, ${\boldsymbol \Upsilon}_{4}(0)=[0.2880, $ $ 0.6925, 0.5567]^{\rm T}$; 估计器$\boldsymbol{\Xi}_{i}(t)$的初值为: ${\boldsymbol \Xi}_{1}(0)=$ $[0.2060, 0.9479]^{\rm T}$, ${\boldsymbol \Xi}_{2}(0)=[0.0821, 0.1057]^{\rm T}$, ${\boldsymbol \Xi}_{3}(0)$ $=[0.1420, 0.1665]^{\rm T}$, ${\boldsymbol \Xi}_{4}(0)=[0.6210, 0.5737]^{\rm T}$.
选取$\delta_{1}=1$, $\delta=2$, 对Ricatti方程进行求解, 可以得到$P$.选取$K_{1i}$, $Q_{i}$使得$A_i+B_iK_{1i}$和$A_i-Q_iC_{mi}$是Hurwitz矩阵, 对式(4)进行求解, 可以得到$X_{i}=\left[{array}{ccc} 1 & 0 \\ \textstyle 0.5i & 1 \\ 0 & 0 {array}\right]$, $U_{i}=\left[{array}{cc} \frac{\textstyle 0.5id_{i} }{\textstyle b_{i}} & \frac{ \textstyle d_{i} }{\textstyle b_{i}} {array} \right]$, 又因为$K_{2i}=U_{i}-K_{1i}X_{i}$, 取$K_{1i}=\left[{array}{ccc} -2 & -2 & -2 {array}\right]$, $Q_{i}=\left[{array}{cc} 0 & 0 \\ 10 & 10 \\ -9 & -9 {array}\right]$, 得出$K_{2i}=\left[{array}{cc} \frac{\textstyle 0.5id_{i}}{\textstyle b_{i}}+2+i & \frac{ \textstyle d_{i} }{\textstyle b_{i}} {array} \right]$.取$\beta_{i}=0.1$, $\gamma_{i}=0.1$, $\Omega_{i}(0)=\left[{array}{cccc} 1.2 & 3.2 & 2.5 & 1.7 {array} \right]$, $\theta_{i}(0)=\left[{array}{cccc} 1.2 & 3.2 & 2.5 & 1.7 {array} \right]$.通讯拓扑图如图 1所示, 拉氏矩阵为$H=\left[{array}{cccc} 1 & -1 & 0 & 0 \\ -1 & 1 & 0 & 0 \\ 0 & 0 & 1 & -1 \\ 0 & 0 & -1 & 1 {array}\right]$.
编队仿真结果如图 3所示, 4个跟随者与领导者能够完成直角编队任务, 从图 4和5可知, 多智能体系统调节输出${\boldsymbol{e}}_{i}(t)$能够渐近趋于零. 图 6和7分别表示控制器和自触发条件的自适应参数的变化, 从图中可以看出这两个自适应参数均渐近趋于有限稳态值.本文中, 总的仿真时间50秒, 总平均触发次数为321, 平均触发时间间隔为$0.1557$秒, 相比文献[19]的仿真结果, 其平均触发次数均在600以上, 本文中的自触发规则能够有效地减少触发次数, 表明本文中的自触发机制不仅能够避免对触发条件进行连续监测, 也能够有效降低智能体之间的通信次数.
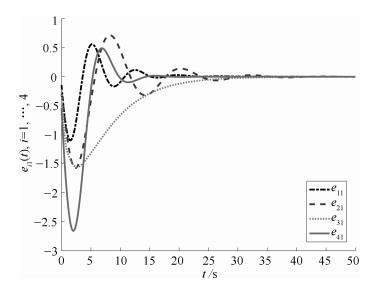 图 4 智能体的调节输出$\boldsymbol{e}_{i1}(t)$, $i=1, 2, 3, 4$Fig. 4 Regulated outputs $\boldsymbol{e}_{i1}(t)$, $i=1, 2, 3, 4$
图 4 智能体的调节输出$\boldsymbol{e}_{i1}(t)$, $i=1, 2, 3, 4$Fig. 4 Regulated outputs $\boldsymbol{e}_{i1}(t)$, $i=1, 2, 3, 4$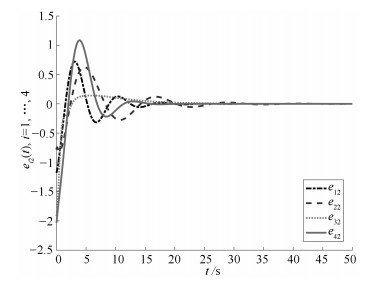 图 5 智能体的调节输出$\boldsymbol{e}_{i2}(t)$, $i=1, 2, 3, 4$Fig. 5 Regulated outputs $\boldsymbol{e}_{i2}(t)$, $i=1, 2, 3, 4$
图 5 智能体的调节输出$\boldsymbol{e}_{i2}(t)$, $i=1, 2, 3, 4$Fig. 5 Regulated outputs $\boldsymbol{e}_{i2}(t)$, $i=1, 2, 3, 4$ 图 6 控制器的自适应参数$\Omega_{i}(t)$, $i=1, 2, 3, 4$Fig. 6 Adaptive parameters of the controllers $\Omega_{i}(t)$, $i=1, 2, 3, 4$
图 6 控制器的自适应参数$\Omega_{i}(t)$, $i=1, 2, 3, 4$Fig. 6 Adaptive parameters of the controllers $\Omega_{i}(t)$, $i=1, 2, 3, 4$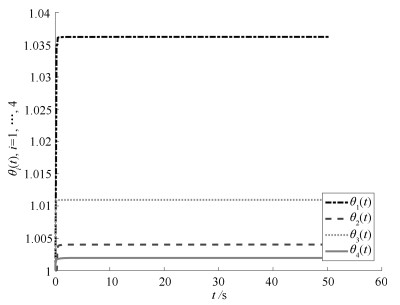 图 7 自触发条件的自适应参数$\theta_{i}(t)$, $i=1, 2, 3, 4$Fig. 7 Adaptive parameters of the self-triggered conditions $\theta_{i}(t)$, $i=1, 2, 3, 4$
图 7 自触发条件的自适应参数$\theta_{i}(t)$, $i=1, 2, 3, 4$Fig. 7 Adaptive parameters of the self-triggered conditions $\theta_{i}(t)$, $i=1, 2, 3, 4$4. 结论
本文设计了基于自触发规则的分布式自适应控制器, 在该控制器作用下, 异构多智能体系统能够很好地跟踪外部系统.同时, 该控制器不需要智能体之间进行连续通信, 能够有效降低智能体之间的通信负载, 且不需要对触发条件进行连续监测, 触发时间可通过自身信息和邻居节点的信息计算获得, 降低了硬件设计要求.
-
图 4 智能体的调节输出$\boldsymbol{e}_{i1}(t)$, $i=1, 2, 3, 4$
Fig. 4 Regulated outputs $\boldsymbol{e}_{i1}(t)$, $i=1, 2, 3, 4$
图 5 智能体的调节输出$\boldsymbol{e}_{i2}(t)$, $i=1, 2, 3, 4$
Fig. 5 Regulated outputs $\boldsymbol{e}_{i2}(t)$, $i=1, 2, 3, 4$
图 6 控制器的自适应参数$\Omega_{i}(t)$, $i=1, 2, 3, 4$
Fig. 6 Adaptive parameters of the controllers $\Omega_{i}(t)$, $i=1, 2, 3, 4$
-
[1] Ren W, Chao H Y, Bourgeous W, Sorensen N, Chen Y Q. Experimental validation of consensus algorithms for multivehicle cooperative control. IEEE Transactions on Control Systems Technology, 2008, 16(4):745-752 doi: 10.1109/TCST.2007.912239 [2] Wang G, Wang C L, Du Q H, Li L, Dong W J. Distributed cooperative control of multiple nonholonomic mobile robots. Journal of Intelligent & Robotic Systems, 2016, 83(3-4):525-541 http://cn.bing.com/academic/profile?id=4755fca84814b264340cafd622de2cbb&encoded=0&v=paper_preview&mkt=zh-cn [3] Han J L, Chen Y Q. Multiple UAV formations for cooperative source seeking and contour mapping of a radiative signal field. Journal of Intelligent & Robotic Systems, 2014, 74(1-2):323-332 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b32b4c1925d5e5c88493b1c1551c8755 [4] Zhang H, Yang R H, Yan H C, Yang F W. H_∞ consensus of event-based multi-agent systems with switching topology. Information Sciences, 2016, 370-371:623-635 doi: 10.1016/j.ins.2015.11.019 [5] 罗小元, 杨帆, 李绍宝, 关新平.多智能体系统的最优持久编队生成策略.自动化学报, 2014, 40(7):1311-1319 http://www.aas.net.cn/CN/abstract/abstract18402.shtmlLuo Xiao-Yuan, Yang Fan, Li Shao-Bao, Guan Xin-Ping. Generation of optimally persistent formation for multi-agent systems. Acta Automatica Sinica, 2014, 40(7):1311-1319 http://www.aas.net.cn/CN/abstract/abstract18402.shtml [6] Huang J. Nonlinear Output Regulation: Theory and Applications. Philadelphia: SIAM, 2004. 6-8 [7] 徐君, 张国良, 曾静, 孙巧, 羊帆.具有时延和切换拓扑的高阶离散时间多智能体系统鲁棒保性能一致性.自动化学报, 2019, 45(2):360-373 http://www.aas.net.cn/CN/abstract/abstract19442.shtmlXu Jun, Zhang Guo-Liang, Zeng Jing, Sun Qiao, Yang Fan. Robust guaranteed cost consensus for high-order discrete-time multi-agent systems with switching topologies and time delays. Acta Automatica Sinica, 2019, 45(2):360-373 http://www.aas.net.cn/CN/abstract/abstract19442.shtml [8] 陈世明, 管俊杰, 高彦丽, 裴惠琴, 邱昀.组合连通拓扑下基于事件触发的多智能体快速一致性算法.自动化学报, 2018, 44(12):2269-2277 http://www.aas.net.cn/CN/abstract/abstract19406.shtmlChen Shi-Ming, Guan Jun-Jie, Gao Yan-Li, Pei Hui-Qin, Qiu Yun. Event-triggered fast consensus algorithm for multi-agent systems under jointly-connected topology. Acta Automatica Sinica, 2018, 44(12):2269-2277 http://www.aas.net.cn/CN/abstract/abstract19406.shtml [9] Xiang J, Li Y J, Hill D J. Cooperative output regulation of linear multi-agent network systems with dynamic edges. Automatica, 2017, 77:1-13 doi: 10.1016/j.automatica.2016.11.016 [10] 吴苗苗, 张皓, 严怀成, 陈世明.异步切换多智能体系统的协同输出调节.自动化学报, 2017, 43(5):735-742 http://www.aas.net.cn/CN/abstract/abstract19051.shtmlWu Miao-Miao, Zhang Hao, Yan Huai-Cheng, Chen Shi-Ming. Cooperative output regulation for asynchronously switched multi-agent systems. Acta Automatica Sinica, 2017, 43(5):735-742 http://www.aas.net.cn/CN/abstract/abstract19051.shtml [11] Xiang J, Wei W, Li Y J. Synchronized output regulation of linear networked systems. IEEE Transactions on Automatic Control, 2009, 54(6):1336-1341 doi: 10.1109/TAC.2009.2015546 [12] Wang X L, Hong Y G, Huang J, Jiang Z P. A distributed control approach to a robust output regulation problem for multi-agent linear systems. IEEE Transactions on Automatic Control, 2010, 55(12):2891-2895 doi: 10.1109/TAC.2010.2076250 [13] Su Y F, Huang J. Cooperative output regulation of linear multi-agent systems. IEEE Transactions on Automatic Control, 2012, 57(4):1062-1066 doi: 10.1109/TAC.2011.2169618 [14] Li S B, Feng G, Wang J, Luo X Y, Guan X P. Adaptive control for cooperative linear output regulation of heterogeneous multi-agent systems with periodic switching topology. IET Control Theory and Applications, 2015, 9(1):34-41 doi: 10.1049/iet-cta.2014.0315 [15] Guo G, Ding L, Han Q L. A distributed event-triggered transmission strategy for sampled-data consensus of multi-agent systems. Automatica, 2014, 50(5):1489-1496 doi: 10.1016/j.automatica.2014.03.017 [16] Yin X X, Yue D, Hu S L. Distributed event-triggered control of discrete-time heterogeneous multi-agent systems. Journal of the Franklin Institute, 2013, 350(3):651-669 doi: 10.1016/j.jfranklin.2012.12.015 [17] Zhang H, Feng G, Yan H C, Chen Q J. Observer-based output feedback event-triggered control for consensus of multi-agent systems. IEEE Transactions on Industrial Electronics, 2014, 61(9):4885-4894 doi: 10.1109/TIE.2013.2290757 [18] Yang R H, Zhang H, Feng G, Yan H C. Distributed event-triggered adaptive control for cooperative output regulation of heterogeneous multiagent systems under switching topology. IEEE Transactions on Neural Networks and Learning Systems, 2017, PP(99):1-12 http://cn.bing.com/academic/profile?id=5f1351ae620a1ce925a34c0864b3bb0e&encoded=0&v=paper_preview&mkt=zh-cn [19] Hu W F, Liu L. Cooperative output regulation of heterogeneous linear multi-agent systems by event-triggered control. IEEE Transactions on Cybernetics, 2017, 47(1):105-116 doi: 10.1109/TCYB.2015.2508561 [20] Ren W, Beard R W. Distributed Consensus in Multi-Vehicle Cooperative Control. London, UK: Springer, 2008. [21] Wieland P, Sepulchre R, Allgöwer F. An internal model principle is necessary and sufficient for linear output synchronization. Automatica, 2011, 47(5):1068-1074 doi: 10.1016/j.automatica.2011.01.081 -

 下载:
下载:
 下载:
下载:

计量
- 文章访问数: 1783
- HTML全文浏览量: 1037
- PDF下载量: 253
- 被引次数: 0
