

Cooperative Output Regulation of Heterogeneous Multi-agent Systems by Self-triggered
-
摘要: 本文针对线性异构多智能体系统,基于自适应自触发条件,分别设计了状态和输出反馈协同控制器.其中自适应控制策略可以避免使用多智能体系统的全局信息,从而实现分布式控制;自触发控制不仅可以避免对触发条件进行连续监测,还可以有效地降低网络的通信负载和控制器的更新次数,且不存在芝诺现象.最后通过4个跟随智能体和一个领导智能体进行了协同输出直角编队仿真实验,实现了多智能体系统对外部系统的渐近跟踪和干扰抑制,验证了结果的有效性.Abstract: This paper studies the cooperative output regulation problem for heterogeneous multi-agent systems. Based on the adaptive self-triggered conditions, a novel distributed adaptive cooperative output control mechanism is designed for state and output feedback, respectively. The adaptive control strategy can avoid using the global information of multi-agent systems and achieve distributed control. The self-triggering mechanism can not only avoid the continuous monitoring of the triggering conditions, but also can effectively reduce the network communication loads and the number of updates of the controller, and there is no Zeno phenomenon. Finally the right-angle formation simulation with four follower agents and a leader agent is presented, which can achieve the asymptotic tracking and disturbance rejection, and illustrate the effectiveness of main results.1) 本文责任编委 刘艳军
-
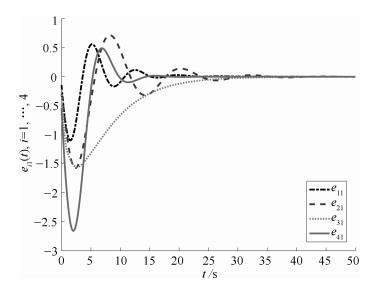
图 4 智能体的调节输出$\boldsymbol{e}_{i1}(t)$, $i=1, 2, 3, 4$
Fig. 4 Regulated outputs $\boldsymbol{e}_{i1}(t)$, $i=1, 2, 3, 4$
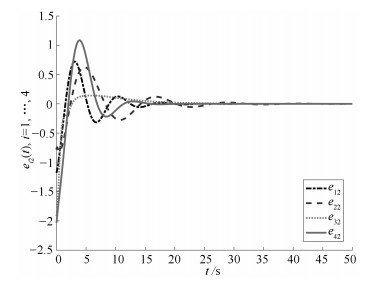
图 5 智能体的调节输出$\boldsymbol{e}_{i2}(t)$, $i=1, 2, 3, 4$
Fig. 5 Regulated outputs $\boldsymbol{e}_{i2}(t)$, $i=1, 2, 3, 4$

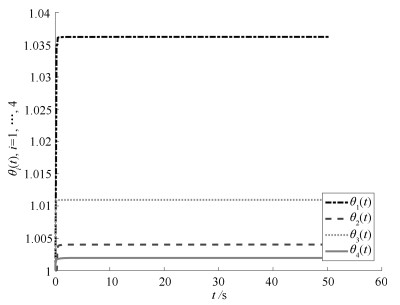
图 6 控制器的自适应参数$\Omega_{i}(t)$, $i=1, 2, 3, 4$
Fig. 6 Adaptive parameters of the controllers $\Omega_{i}(t)$, $i=1, 2, 3, 4$
-
[1] Ren W, Chao H Y, Bourgeous W, Sorensen N, Chen Y Q. Experimental validation of consensus algorithms for multivehicle cooperative control. IEEE Transactions on Control Systems Technology, 2008, 16(4):745-752 doi: 10.1109/TCST.2007.912239 [2] Wang G, Wang C L, Du Q H, Li L, Dong W J. Distributed cooperative control of multiple nonholonomic mobile robots. Journal of Intelligent & Robotic Systems, 2016, 83(3-4):525-541 http://cn.bing.com/academic/profile?id=4755fca84814b264340cafd622de2cbb&encoded=0&v=paper_preview&mkt=zh-cn [3] Han J L, Chen Y Q. Multiple UAV formations for cooperative source seeking and contour mapping of a radiative signal field. Journal of Intelligent & Robotic Systems, 2014, 74(1-2):323-332 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b32b4c1925d5e5c88493b1c1551c8755 [4] Zhang H, Yang R H, Yan H C, Yang F W. H_∞ consensus of event-based multi-agent systems with switching topology. Information Sciences, 2016, 370-371:623-635 doi: 10.1016/j.ins.2015.11.019 [5] 罗小元, 杨帆, 李绍宝, 关新平.多智能体系统的最优持久编队生成策略.自动化学报, 2014, 40(7):1311-1319 http://www.aas.net.cn/CN/abstract/abstract18402.shtmlLuo Xiao-Yuan, Yang Fan, Li Shao-Bao, Guan Xin-Ping. Generation of optimally persistent formation for multi-agent systems. Acta Automatica Sinica, 2014, 40(7):1311-1319 http://www.aas.net.cn/CN/abstract/abstract18402.shtml [6] Huang J. Nonlinear Output Regulation: Theory and Applications. Philadelphia: SIAM, 2004. 6-8 [7] 徐君, 张国良, 曾静, 孙巧, 羊帆.具有时延和切换拓扑的高阶离散时间多智能体系统鲁棒保性能一致性.自动化学报, 2019, 45(2):360-373 http://www.aas.net.cn/CN/abstract/abstract19442.shtmlXu Jun, Zhang Guo-Liang, Zeng Jing, Sun Qiao, Yang Fan. Robust guaranteed cost consensus for high-order discrete-time multi-agent systems with switching topologies and time delays. Acta Automatica Sinica, 2019, 45(2):360-373 http://www.aas.net.cn/CN/abstract/abstract19442.shtml [8] 陈世明, 管俊杰, 高彦丽, 裴惠琴, 邱昀.组合连通拓扑下基于事件触发的多智能体快速一致性算法.自动化学报, 2018, 44(12):2269-2277 http://www.aas.net.cn/CN/abstract/abstract19406.shtmlChen Shi-Ming, Guan Jun-Jie, Gao Yan-Li, Pei Hui-Qin, Qiu Yun. Event-triggered fast consensus algorithm for multi-agent systems under jointly-connected topology. Acta Automatica Sinica, 2018, 44(12):2269-2277 http://www.aas.net.cn/CN/abstract/abstract19406.shtml [9] Xiang J, Li Y J, Hill D J. Cooperative output regulation of linear multi-agent network systems with dynamic edges. Automatica, 2017, 77:1-13 doi: 10.1016/j.automatica.2016.11.016 [10] 吴苗苗, 张皓, 严怀成, 陈世明.异步切换多智能体系统的协同输出调节.自动化学报, 2017, 43(5):735-742 http://www.aas.net.cn/CN/abstract/abstract19051.shtmlWu Miao-Miao, Zhang Hao, Yan Huai-Cheng, Chen Shi-Ming. Cooperative output regulation for asynchronously switched multi-agent systems. Acta Automatica Sinica, 2017, 43(5):735-742 http://www.aas.net.cn/CN/abstract/abstract19051.shtml [11] Xiang J, Wei W, Li Y J. Synchronized output regulation of linear networked systems. IEEE Transactions on Automatic Control, 2009, 54(6):1336-1341 doi: 10.1109/TAC.2009.2015546 [12] Wang X L, Hong Y G, Huang J, Jiang Z P. A distributed control approach to a robust output regulation problem for multi-agent linear systems. IEEE Transactions on Automatic Control, 2010, 55(12):2891-2895 doi: 10.1109/TAC.2010.2076250 [13] Su Y F, Huang J. Cooperative output regulation of linear multi-agent systems. IEEE Transactions on Automatic Control, 2012, 57(4):1062-1066 doi: 10.1109/TAC.2011.2169618 [14] Li S B, Feng G, Wang J, Luo X Y, Guan X P. Adaptive control for cooperative linear output regulation of heterogeneous multi-agent systems with periodic switching topology. IET Control Theory and Applications, 2015, 9(1):34-41 doi: 10.1049/iet-cta.2014.0315 [15] Guo G, Ding L, Han Q L. A distributed event-triggered transmission strategy for sampled-data consensus of multi-agent systems. Automatica, 2014, 50(5):1489-1496 doi: 10.1016/j.automatica.2014.03.017 [16] Yin X X, Yue D, Hu S L. Distributed event-triggered control of discrete-time heterogeneous multi-agent systems. Journal of the Franklin Institute, 2013, 350(3):651-669 doi: 10.1016/j.jfranklin.2012.12.015 [17] Zhang H, Feng G, Yan H C, Chen Q J. Observer-based output feedback event-triggered control for consensus of multi-agent systems. IEEE Transactions on Industrial Electronics, 2014, 61(9):4885-4894 doi: 10.1109/TIE.2013.2290757 [18] Yang R H, Zhang H, Feng G, Yan H C. Distributed event-triggered adaptive control for cooperative output regulation of heterogeneous multiagent systems under switching topology. IEEE Transactions on Neural Networks and Learning Systems, 2017, PP(99):1-12 http://cn.bing.com/academic/profile?id=5f1351ae620a1ce925a34c0864b3bb0e&encoded=0&v=paper_preview&mkt=zh-cn [19] Hu W F, Liu L. Cooperative output regulation of heterogeneous linear multi-agent systems by event-triggered control. IEEE Transactions on Cybernetics, 2017, 47(1):105-116 doi: 10.1109/TCYB.2015.2508561 [20] Ren W, Beard R W. Distributed Consensus in Multi-Vehicle Cooperative Control. London, UK: Springer, 2008. [21] Wieland P, Sepulchre R, Allgöwer F. An internal model principle is necessary and sufficient for linear output synchronization. Automatica, 2011, 47(5):1068-1074 doi: 10.1016/j.automatica.2011.01.081 -

 下载:
下载:


图(7)
计量
- 文章访问数: 1969
- HTML全文浏览量: 1075
- PDF下载量: 262
- 被引次数: 0
