

Rejection Algorithm for Low-resolution Radar Target Classification According to Minimum Cost
-
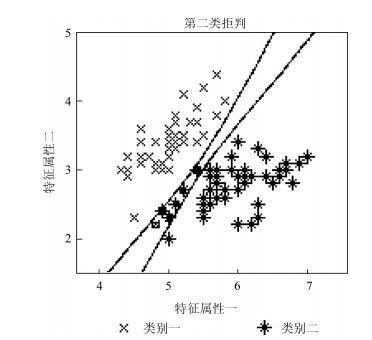
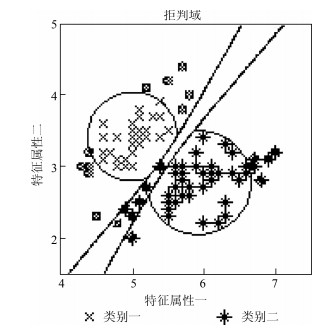
摘要: 为解决低分辨雷达目标自动识别中,干扰目标、虚假目标的存在以及不同类别目标样本集混叠的问题,提出了一种基于最小代价的拒判K近邻识别算法.该算法根据雷达识别系统最小代价的原则,利用Fisher判别函数,确定拒判门限.设计了基于两类拒判域的K近邻识别算法,第一类拒判根据训练样本集特征值的波动范围,对干扰目标和虚假目标进行拒判;第二类拒判根据测试样本与最近邻、次近邻的距离差,实现混叠区域的目标样本拒判.算法先对测试样本进行拒判分析,再利用K近邻算法识别分类.实验结果表明,基于以上算法的低分辨雷达目标识别系统具有较好的鲁棒性和识别性能.Abstract: In order to solve the problem of interference target, false target and aliasing of different types of targets in low-resolution radar automatic recognition systems, a new K-nearest neighbor algorithm based on minimum cost is proposed. According to the principle of minimum cost of radar recognition system, Fisher discrimination is used to determine the rejection threshold. Two kinds of rejection regions are designed. The first kind rejection region, according to the fluctuation range of training samples' characteristic values, is used to reject interference targets and false targets. The second kind is used for the targets in aliasing region. Firstly, the test sample is analyzed by rejection region, then the K-nearest neighbor algorithm is used for recognition and classification. Experiment results show that the low-resolution radar target recognition system based on the above algorithm has better robustness and recognition performance.
-
Key words:
- Low-resolution radar /
- target classification /
- rejection region /
- K-nearest neighbor
1) 本文责任编委 桑农 -

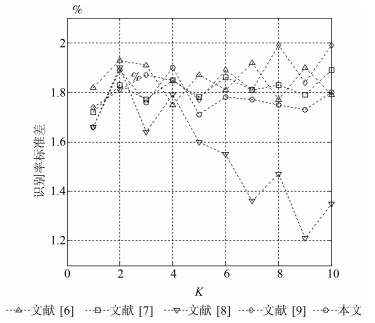
图 12 平均识别率随$\mathit{K}$值的变化
Fig. 12 Average recognition rate with different $\mathit{K}$
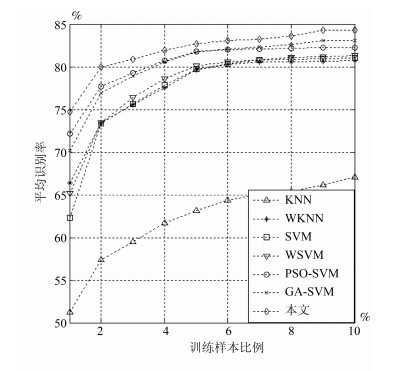
图 14 不同比例的训练样本各种方法的平均识别率
Fig. 14 Average recognition rate using different percent of training samples per class
表 1 标准数据集
Table 1 Standard datasets
Datasets Wine Iris Yeast Ecoli Winequality white Winequality red Seeds Vertebral column Instances 178 150 1 484 336 4 898 1 599 210 310 Attributes 13 4 8 7 11 11 7 6 Classes 3 3 10 8 7 6 3 3  下载: 导出CSV
下载: 导出CSV
表 2 拒判样本数目
Table 2 The number of rejection sample
拒判门限 0.01 0.03 0.05 0.07 0.09 0.11 0.13 0.15 0.17 0.19 0.21 0.23 0.25 人一类拒判 0 0 0 0 0 0 1 2 3 4 7 9 11 人二类拒判 5 15 26 35 44 61 81 98 115 142 170 202 225 摩托一类拒判 0 0 1 1 1 1 6 10 13 14 15 23 36 摩托二类拒判 2 5 6 10 12 12 13 16 16 18 21 23 24 卡车一类拒判 0 0 0 0 1 1 2 4 8 22 48 84 139 卡车二类拒判 0 1 2 3 3 3 3 4 5 6 6 7 7 库外一类拒判 18 30 38 48 64 80 89 105 120 137 158 173 193 库外二类拒判 142 136 133 130 120 114 112 107 101 94 84 79 68
下载: 导出CSV
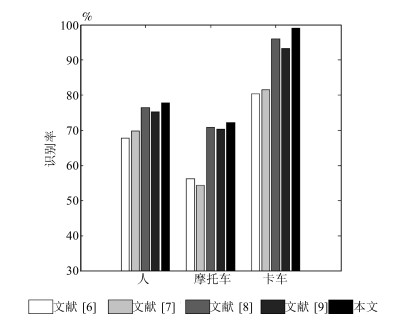
表 3 对雷达目标数据集使用5 %的训练样本各个算法的分类正确率(%)
Table 3 Classification accuracy for the radar target dataset using 5 % training samples per class (%)
# 类别 训练样本 测试样本 KNN WKNN SVM WSVM GA-SVM PSO-SVM 本文方法 1 人 20 378 64.47 75.42 78.21 79.13 80.24 80.71 77.85 2 摩托车 16 303 50.22 70.45 70.08 69.40 71.45 72.09 72.10 3 卡车 20 373 74.64 93.04 90.84 91.89 93.41 92.63 98.06 平均识别率 63.11 79.63 79.71 80.14 81.70 81.81 82.67 识别率标准差 2.13 1.67 1.92 1.90 1.69 1.73 1.77
下载: 导出CSV
-
[1] Smith G R, Goggans P M. Radar target identification. IEEE Antennas and Propagation Magazine, 1993, 35(2):27-38 doi: 10.1109/74.207649 [2] Bell M R, Grubbs R A. JEM modeling and measurement for radar target identification. IEEE Transactions on Aerospace and Electronic Systems, 1993, 29(1):73-87 doi: 10.1109/7.249114 [3] Rihaczek A W, Hershkowitz S J. Theory and Practice of Radar Target Identification. Norwood, United States: Artech House Radar Library, 2000. 69-83 [4] 李彦兵, 杜兰, 刘宏伟, 王宝帅.基于微多普勒效应和多级小波分解的轮式履带式车辆分类研究.电子与信息学报, 2013, 35(4):894-900 http://www.cnki.com.cn/Article/CJFDTotal-HBYD201306041.htmLi Yan-Bing, Du Lan, Liu Hong-Wei, Wang Bao-Shuai. Study on classification of wheeled and tracked vehicles based on micro-Doppler effect and multilevel wavelet decomposition. Journal of Electronics & Information Technology, 2013, 35(4):894-900 http://www.cnki.com.cn/Article/CJFDTotal-HBYD201306041.htm [5] 陈志仁, 顾红, 苏卫民, 王钊.基于特征概率分布的低分辨雷达地面目标分类.系统工程与电子技术, 2016, 38(2):274-280 doi: 10.3969/j.issn.1001-506X.2016.02.06Chen Zhi-Ren, Gu Hong, Su Wei-Min, Wang Zhao. Ground target classification for low-resolution radar based on the probability distribution of feature. Systems Engineering and Electronics, 2016, 38(2):274-280 doi: 10.3969/j.issn.1001-506X.2016.02.06 [6] 陈振洲, 李磊, 姚正安.基于SVM的特征加权KNN算法.中山大学学报(自然科学版), 2005, 44(1):17-20 http://www.cnki.com.cn/Article/CJFDTotal-XTYY201402022.htmChen Zhen-Zhou, Li Lei, Yao Zheng-An. Feature-weighted K-nearest neighbor algorithm with SVM. Acta Scientiarum Naturalium Universitatis Sunyatseni, 2005, 44(1):17-20 http://www.cnki.com.cn/Article/CJFDTotal-XTYY201402022.htm [7] Vivencio D P, Hruschka E R, Do Carmo Nicoletti M, Dos Santos E B, Galvao S D C O. Feature-weighted K-nearest neighbor classifier. In: Proceedings of the 2007 IEEE Symposium on Foundations of Computational Intelligence. Honolulu, HI, USA: IEEE, 2007. 481-486 [8] 侯玉婷, 彭进业, 郝露微, 王瑞.基于KNN的特征自适应加权自然图像分类研究.计算机应用研究, 2014, 31(3):957-960 http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_jsjyyyj201403077Hou Yu-Ting, Peng Jin-Ye, Hao Lu-Wei, Wang Rui. Research of classification method for natural images based on adaptive feature-weighted K-nearest neighbors. Application Research of Computers, 2014, 31(3):957-960 http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_jsjyyyj201403077 [9] 严爱军, 钱丽敏, 王普.案例推理属性权重的分配模型比较研究.自动化学报, 2014, 40(9):1896-1902 http://www.aas.net.cn/CN/abstract/abstract18459.shtmlYan Ai-Jun, Qian Li-Min, Wang Pu. A comparative study of attribute weights assignment for case-based reasoning. Acta Automatica Sinica, 2014, 40(9):1896-1902 http://www.aas.net.cn/CN/abstract/abstract18459.shtml [10] Hechenbichler K, Schliep K. Weighted k-nearest-neighbor techniques and ordinal classification. Discussion Paper 399, 2004. 1-17 [11] Wang B, Zeng Y, Yang Y P. Generalized nearest neighbor rule for pattern classification. In: Proceedings of the 7th World Congress on Intelligent Control and Automation. Chongqing, China: IEEE, 2008. 8465-8470 [12] Murrugarra-Llerena N, De Andrade Lopes A. An adaptive graph-based K-nearest neighbor[Online], available: http://conteudo.icmc.usp.br/pessoas/alneu/papers/colisd2011_AdaptiveKNN.pdf, September 8, 2017 [13] Ghosh A K. On nearest neighbor classification using adaptive choice of k. Journal of Computational and Graphical Statistics, 2007, 16(2):482-502 doi: 10.1198/106186007X208380 [14] 宗鸣, 龚永红, 文国秋, 程德波, 朱永华.基于稀疏学习的kNN分类.广西师范大学学报(自然科学版), 2016, 34(3):39-45 http://www.cnki.com.cn/Article/CJFDTotal-XTYD201508008.htmZong Ming, Gong Yong-Hong, Wen Guo-Qiu, Cheng De-Bo, Zhu Yong-Hua. kNN classification based on sparse learning. Journal of Guangxi Normal University (Natural Science Edition), 2016, 34(3):39-45 http://www.cnki.com.cn/Article/CJFDTotal-XTYD201508008.htm [15] UCI. Machine learning repository[Online], available: http://archive.ics.uci.edu/ml/, September 8, 2017 [16] 柴晶, 刘宏伟, 保铮.加权KNN分类器在HRRP库外目标拒判中的应用.系统工程与电子技术, 2010, 32(4):718-723 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201004012Chai Jing, Liu Hong-Wei, Bao Zheng. Application of a weighted KNN classifier for HRRP out-of-database target rejection. Systems Engineering and Electronics, 2010, 32(4):718-723 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201004012 [17] 陈志仁, 顾红, 苏卫民, 王钊.改进的支持向量机低分辨雷达目标分类算法.系统工程与电子技术, 2017, 39(11):2456-2462 doi: 10.3969/j.issn.1001-506X.2017.11.10Chen Zhi-Ren, Gu Hong, Su Wei-Min, Wang Zhao. Improved support vector machine target classification algorithm for low-resolution radar. Systems Engineering and Electronics, 2017, 39(11):2456-2462 doi: 10.3969/j.issn.1001-506X.2017.11.10 [18] Sukawattanavijit C, Chen J, Zhang H S. GA-SVM algorithm for improving Land-cover classification using SAR and optical remote sensing data. IEEE Geoscience and Remote Sensing Letters, 2017, 14(3):284-288 doi: 10.1109/LGRS.2016.2628406 [19] Xue Z H, Du P J, Su H J. Harmonic analysis for hyperspectral image classification integrated with PSO optimized SVM. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(6):2131-2146 doi: 10.1109/JSTARS.2014.2307091 -

 下载:
下载:




计量
- 文章访问数: 1934
- HTML全文浏览量: 429
- PDF下载量: 613
- 被引次数: 0
