

-
摘要: 针对工业桥式起重机输入信号存在时滞的问题,本文设计了一种鲁棒跟踪控制器.具体而言,本文通过分析欠驱动桥式起重机的特性,引入辅助系统,将时滞模型等效为不存在时滞的模型.在此基础上,考虑系统参数的不确定性,设计了一种鲁棒跟踪控制器.本文使用基于Lyapunov理论的稳定性分析及证明方法,通过建立Lyapunov-Krasovskii(LK)方程证明了位置跟踪误差以及摆角可以在有限时间内收敛到一个界内,且界的大小与控制增益负相关.完成控制器设计后,将其与工业上常用的比例-积分-微分(Proportion-integration-differentiation,PID)控制方法进行比较.仿真及实验结果表明,本文所设计的控制器优于PID控制器,具有良好的控制性能.
-
关键词:
- 桥式起重机 /
- 输入时滞 /
- 鲁棒控制 /
- Lyapunov方法
Abstract: To solve the problem of input delay of an industrial overhead crane, this paper designs a robust controller. Specifically, based on the analysis of the system model, an auxiliary system is introduced to convert the model of the crane system with input delay to a non-delay system. Based on the new system, considering the parameter uncertainties, a robust tracking controller is constructed. The Lyapunov-Krasovskii (LK) function is applied to complete the stability analysis when using the Lyapunov theory to prove that the trolley tracking error and the swing angle converge to a domain in a finite time. The relationship between the radius of the domain and the control gain is negative correlation. After designing the robust controller, we compare it with the proportion-integration-differentiation (PID) control algorithm, both the simulation results and experiment results show the efficiency of the proposed tracking controller.-
Key words:
- Overhead crane /
- input delay /
- robust control /
- Lyapunov method
-
-
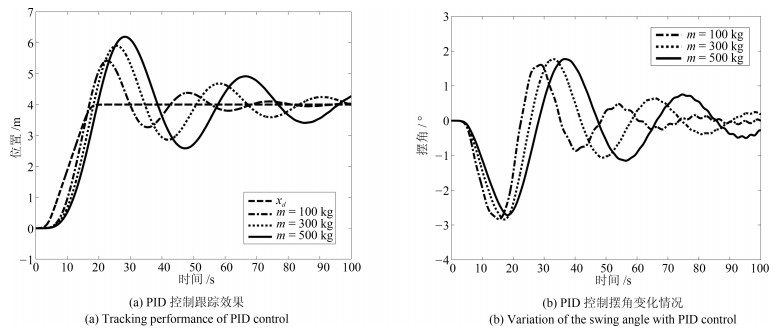
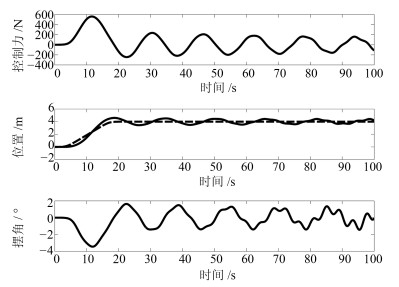
图 4 不同负载质量下PID控制器控制效果
Fig. 4 The performance of PID controller with different payload mass
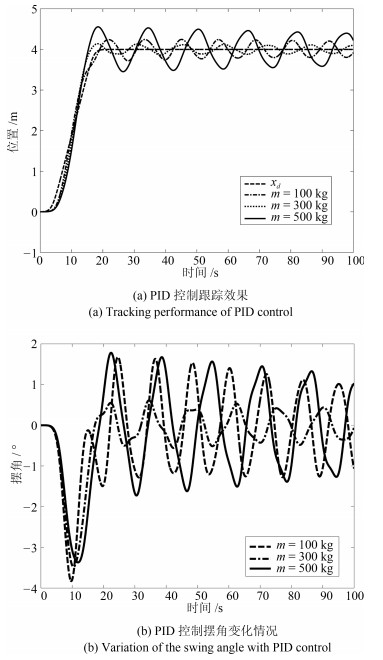
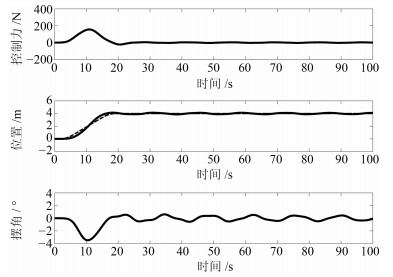
图 5 不同负载质量下鲁棒控制器控制效果
Fig. 5 The performance of robust controller with different payload mass
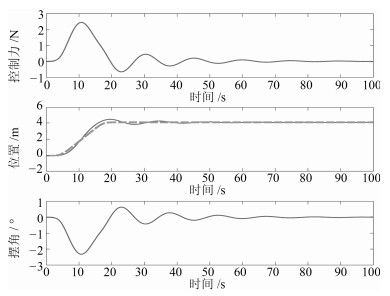
图 6 依据实验平台参数的仿真结果
Fig. 6 Simulation results of the controller with the platform parameters
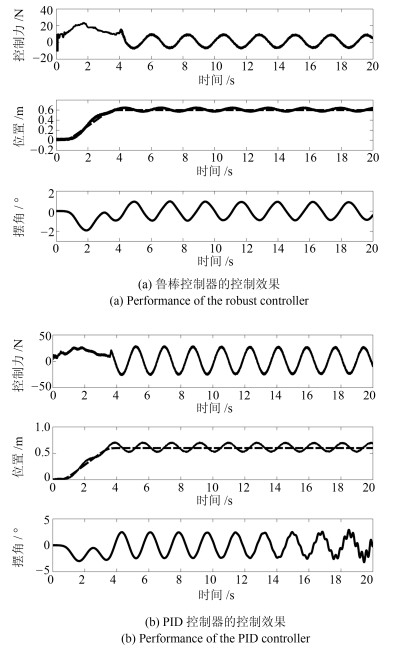
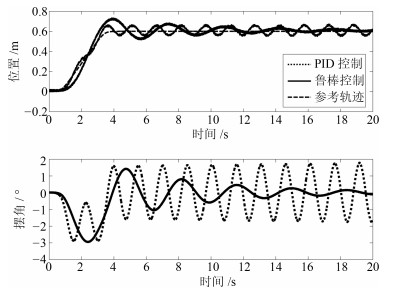
图 7 PID控制器与鲁棒控制器的实验效果对比
Fig. 7 Comparison of the experiment results between the PID controller and the robust controller
-
[1] Richard J P. Time-delay systems:an overview of some recent advances and open problems. Automatica, 2003, 39(10):1667-1694 doi: 10.1016/S0005-1098(03)00167-5 [2] Wu M, He Y, She J H. Stability Analysis and Robust Control of Time-Delay Systems. Beijing, China:Science Press, 2010. [3] Bresch-Pietri D, Kristic M. Adaptive trajectory tracking despite unknown input delay and plant parameters. Automatica, 2009, 45(9):2074-2081 doi: 10.1016/j.automatica.2009.04.027 [4] Huang C, Yu C B. Global adaptive controller for linear systems with unknown input delay. IEEE Transactions on Automatic Control, 2017, 62(12):6589-6594 doi: 10.1109/TAC.2017.2714858 [5] Cai X S, Bekiaris-Liberis N, Kristic M. Input-to-state stability and inverse optimality of linear time-varying-delay predictor feedbacks. IEEE Transactions on Automatic Control, 2018, 63(1):233-240 doi: 10.1109/TAC.2017.2722104 [6] 杜鑫, 丁大伟.基于平衡截断法的离散时间线性时滞系统的低频域模型降阶.自动化学报, 2015, 41(10):1825-1830 http://www.aas.net.cn/CN/abstract/abstract18756.shtmlDu Xin, Ding Da-Wei. Model order reduction of linear delay systems over low-frequency ranges via balanced truncation based approach. Acta Automatica Sinica, 2015, 41(10):1825-1830 http://www.aas.net.cn/CN/abstract/abstract18756.shtml [7] Wang Y E, Sun M X, Wu B W. Lyapunov-Krasovskii functionals for input-to-state stability of switched non-linear systems with time-varying input delay. IET Control Theory & Applications, 2015, 9(11):1717-1722 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=efee368cd30e706d7427c8413e3ec956 [8] Hu X X, Wu L G, Si X S, Xu B. Adaptive sliding mode control of non-linear non-minimum phase system with input delay. IET Control Theory & Applications, 2017, 11(8):1153-1161 http://cn.bing.com/academic/profile?id=591ed2b329c09c5911638bf89b8f25f5&encoded=0&v=paper_preview&mkt=zh-cn [9] 黄亚欣, 张星慧, 蒋蒙蒙.带有输入和状态时滞的高阶非线性前馈系统的自适应控制.自动化学报, 2017, 43(7):1273-1279 http://www.aas.net.cn/CN/abstract/abstract19101.shtmlHuang Ya-Xin, Zhang Xing-Hui, Jiang Meng-Meng. Adaptive control for high-order nonlinear feedforward systems with input and state delays control. Acta Automatica Sinica, 2017, 43(7):1273-1279 http://www.aas.net.cn/CN/abstract/abstract19101.shtml [10] 文新宇.一类含输入时滞非线性系统的干扰观测器控制.自动化学报, 2014, 40(9):1882-1888 http://www.aas.net.cn/CN/abstract/abstract18457.shtmlWen Xin-Yu. Disturbance observer based control for a class of nonlinear systems with input time-delay. Acta Automatica Sinica, 2014, 40(9):1882-1888 http://www.aas.net.cn/CN/abstract/abstract18457.shtml [11] Sharma N, Bhasin Q, Wang Q, Dixon W E. Predictor-based control for an uncertain Euler-Lagrange system with input delay. In:Proceedings of the 2010 American Control Conference (ACC). Baltimore, USA:IEEE, 2010. 1422-1427 [12] Fischer N, Dani A, Sharma N, Dixon W E. Saturated control of an uncertain nonlinear system with input delay. Automatica, 2013, 49(6):1741-1747 doi: 10.1016/j.automatica.2013.02.013 [13] Liu L, Cao J D, Qian C. pth moment exponential input-to-state stability of delayed recurrent neural networks with Markovian switching via vector Lyapunov function. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(7):3152-3163 https://ieeexplore.ieee.org/document/7970146/ [14] Chen B, Liu X P, Tong S C, Chong L. Observer-based stabilization of T-S fuzzy systems with input delay. IEEE Transactions on Fuzzy Systems, 2008, 16(3):652-663 doi: 10.1109/TFUZZ.2007.903329 [15] Zavari K, Pipeleers G, Swevers J. Gain-scheduled controller design:illustration on an overhead crane. IEEE Transactions on Industrial Electronics, 2014, 61(7):3713-3718 doi: 10.1109/TIE.2013.2270213 [16] Boschetti G, Caracciolo R, Richiedei D, Trevisani A. Moving the suspended load of an overhead crane along a pre-specified path:a non-time based approach. Robotics and Computer-Integrated Manufacturing, 2014, 30(3):256-264 doi: 10.1016/j.rcim.2013.10.004 [17] Sun N, Fang Y C, Chen H, Lu B. Amplitude-saturated nonlinear output feedback antiswing control for underactuated cranes with double-pendulum cargo dynamics. IEEE Transactions on Industrial Electronics, 2017, 64(3):2135-2146 doi: 10.1109/TIE.2016.2623258 [18] Sun N, Fang Y C, Zhang X B, Yuan Y. Transportation task-oriented trajectory planning for underactuated overhead cranes using geometric analysis. IET Control Theory & Applications, 2012, 6(10):1410-1423 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=f85390ec56775dfe30914f3443cc302a [19] 胡洲, 王志胜, 甄子洋.带输入饱和的欠驱动吊车非线性信息融合控制.自动化学报, 2014, 40(7):1522-1527 http://www.aas.net.cn/CN/abstract/abstract18422.shtmlHu Zhou, Wang Zhi-Sheng, Zhen Zi-Yang. Nonlinear information fusion control for underactuated cranes with input saturation. Acta Automatica Sinica, 2014, 40(7):1522-1527 http://www.aas.net.cn/CN/abstract/abstract18422.shtml [20] Sano H, Ohishi K, Kaneko T, Mine H. Anti-sway crane control based on dual state observer with sensor-delay correction. In:Proceedings of the 11th IEEE International Workshop on Advanced Motion Control. Nagaoka, Niigata, Japan:IEEE, 2010. 679-684 [21] Dey R, Sinha N, Chaubey P, Ghosh S, Ray G. Active sway control of a single pendulum gantry crane system using output-delayed feedback control technique. In:Proceedings of the 11th International Conference on Control, Automation, Robotics and Vision. Singapore:IEEE, 2010. 532-536 [22] Nayfeh N A, Baumann W T. Nonlinear analysis of time-delay position feedback control of container cranes. Nonlinear Dynamics, 2008, 53(1-2):75-88 doi: 10.1007/s11071-007-9297-z [23] Zhao Y, Gao H J. Fuzzy-model-based control of an overhead crane with input delay and actuator saturation. IEEE Transactions on Fuzzy Systems, 2012, 20(1):181-186 doi: 10.1109/TFUZZ.2011.2164083 [24] 何博, 方勇纯, 刘海亮, 孙宁.桥式起重机精准定位在线轨迹规划方法设计及应用.控制理论与应用, 2016, 33(10):1352-1358 doi: 10.7641/CTA.2016.60312He Bo, Fang Yong-Chun, Liu Hai-Liang, Sun Ning. Precise positioning online trajectory planner design and application for overhead cranes. Control Theory & Applications, 2016, 33(10):1352-1358 doi: 10.7641/CTA.2016.60312 [25] De Queiroz M, Hu J, Dawson D M, Burg T, Donepudi S R. Adaptive position/force control of robot manipulators without velocity measurements:theory and experimentation. IEEE Transactions on Systems, Man and Cybernetics, Part B (Cybernetics), 1997, 27(5):796-809 doi: 10.1109/3477.623233 [26] Dixon W E, De Queiroz M S, Zhang F, Dawson D M. Tracking control of robot manipulators with bounded torque inputs. Robotica, 1999, 17(2):121-129 doi: 10.1017/S0263574799001228 [27] Corless M, Leitmann G. Continuous state feedback guaranteeing uniform ultimate boundedness for uncertain dynamic systems. IEEE Transactions on Automatic Control, 1981, 26(5):1139-1144 doi: 10.1109/TAC.1981.1102785 期刊类型引用(9)
1. 刘鑫屏,陈艺文,董子健. 基于混合算法下RBF神经网络的执行机构非线性特性在线辨识与补偿. 动力工程学报. 2024(05): 792-801 .  百度学术
百度学术2. 刘切,李俊豪,王浩,曾建学,柴毅. 不确定性环境下维纳模型的随机变分贝叶斯学习. 自动化学报. 2024(06): 1185-1198 . 本站查看3. 谌卓玲,卢绍文,张亚军,潘庆玉. 工业过程指标的平滑交替辨识预报算法. 控制理论与应用. 2024(09): 1539-1547 . 百度学术4. 陶金梅,牛宏,张亚军,李旭生. 基于随机配置网络的非线性系统智能建模方法. 控制与决策. 2022(10): 2559-2564 . 百度学术5. 李荟,王福利,李鸿儒. 电熔镁炉熔炼过程异常工况识别及自愈控制方法. 自动化学报. 2020(07): 1411-1419 . 本站查看6. 牛宏,陶金梅,张亚军. 一种新的数据驱动的非线性自适应切换控制方法. 自动化学报. 2020(11): 2359-2366 . 本站查看7. 徐宝昌,张华,王金山. 基于径向基函数的非线性系统近似偏最小一乘准则辨识算法. 化工学报. 2019(02): 653-660 . 百度学术8. 魏萃,柴天佑,贾瑶,王良勇. 补偿信号法驱动的Pendubot自适应平衡控制. 自动化学报. 2019(06): 1146-1156 . 本站查看9. 董斌,刘艳梅,宋进良,韩洪刚,任川. 基于非线性时变参数的红外校验评估技术研究. 自动化仪表. 2017(10): 99-102 . 百度学术其他类型引用(12)
-

 下载:
下载:

计量
- 文章访问数: 2520
- HTML全文浏览量: 368
- PDF下载量: 458
- 被引次数: 21
