

-
摘要: 自能源(We-energy,WE)作为能源互联网的子单元旨在实现能量间的双向传输及灵活转换.由于自能源在不同工况下运行特性存在很大差异,现有方法还不能对其参数精确地辨识.为了解决上述问题,本文根据自能源网络结构提出了一种基于GAN技术的数据——机理混合驱动方法对自能源模型参数辨识.将GAN(Generative adversarial networks)模型中训练数据与专家经验结合进行模糊分类,解决了自能源在不同运行工况下的模型切换问题.通过应用含策略梯度反馈的改进GAN技术对模型进行训练,解决了自能源中输出序列离散的问题.仿真结果表明,提出的模型具有较高的辨识精度和更好的推广性,能有效地拟合系统不同工况下各节点的状态变化.Abstract: As a sub-unit of the energy internet, we-energy (WE) aims at realizing bi-directional power transformation and flexible conversion between various types of energies. As the operating characteristics of WE have large difference under different working conditions, existing methods can not accurately identify its parameters. In order to solve this problem, a data-mechanism hybrid driving method based on generative adversarial networks (GAN) is proposed. In order to switch the WE model under different operating conditions, fuzzy theory is used to achieve fuzzy classification of training data of the GAN model by expertise. A modified GAN model containing policy gradient feedback is applied in training model, therefore solving the issue of discrete output sequence of WE. Simulation results validate that the proposed model is of high identification accuracy and has better generalization performance, and can effectively fit the state variation of each node of the whole system under different operation modes.1) 本文责任编委 谭营
-
表 1 自能源系统设备参数
Table 1 Parameter of equipment in WE system
自能源系统 容量(kW) 功率下限(kW) 功率上限(kW) 光伏发电 40 0 12 风力发电 1×3 0 30 电储能 5×3 $-$10 10 微燃气轮机 80 20 80 燃气锅炉 40×2 20 80 电锅炉 5×4 0 20 热储能 5×2 $-$10 10 水泵 0.5×4 0.4 0.6 压缩机 0.3×2 0.25 0.35  下载: 导出CSV
下载: 导出CSV
表 2 自能源常规运行时模型参数辨识结果
Table 2 Parameter identification results in regular
参数 估值 参数 估值 参数 估值 ${\theta _{11}}$ 0.035 ${\theta _{23}}$ 0.213 ${\theta _{41}}$ $-$0.106 ${\theta _{12}}$ 0.136 ${\theta _{24}}$ $-$0.622 ${\theta _{42}}$ $-$0.127 ${\theta _{13}}$ 0.078 ${\theta _{31}}$ 0.296 ${\theta _{43}}$ 0.312 ${\theta _{14}}$ $-$0.235 ${\theta _{32}}$ 0.065 ${\theta _{44}}$ 0.225 ${\theta _{15}}$ 0.438 ${\theta _{33}}$ 0.386 ${\theta _{45}}$ 0.064 ${\theta _{21}}$ 0.164 ${\theta _{34}}$ 0.176 ${\theta _{46}}$ 0.133 ${\theta _{22}}$ 0.153 ${\theta _{35}}$ 0.217
下载: 导出CSV
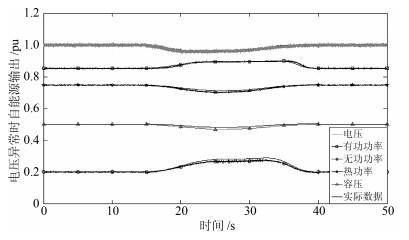
表 3 自能源在电压异常时模型参数辨识结果
Table 3 Parameter identification results of WE model in abnormal voltage
参数 估值 参数 估值 参数 估值 ${\theta _{11}}$ 0.014 ${\theta _{23}}$ 0.178 ${\theta _{41}}$ $-$0.157 ${\theta _{12}}$ 0.123 ${\theta _{24}}$ $-$0.534 ${\theta _{42}}$ $-$0.134 ${\theta _{13}}$ 0.081 ${\theta _{31}}$ 0.237 ${\theta _{43}}$ 0.247 ${\theta _{14}}$ $-$0.211 ${\theta _{32}}$ 0.049 ${\theta _{44}}$ 0.265 ${\theta _{15}}$ 0.369 ${\theta _{33}}$ 0.276 ${\theta _{45}}$ 0.067 ${\theta _{21}}$ 0.145 ${\theta _{34}}$ 0.198 ${\theta _{46}}$ 0.233 ${\theta _{22}}$ 0.147 ${\theta _{35}}$ 0.234
下载: 导出CSV
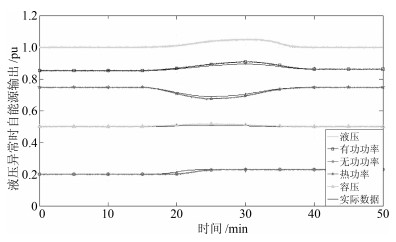
表 4 自能源在液压异常时模型参数辨识结果
Table 4 Parameter identification results of WE model in abnormal fluid pressure
参数 估值 参数 估值 参数 估值 ${\theta _{11}}$ 0.041 ${\theta _{23}}$ 0.206 ${\theta _{41}}$ $-$0.067 ${\theta _{12}}$ 0.089 ${\theta _{24}}$ $-$0.598 ${\theta _{42}}$ $-$0.131 ${\theta _{13}}$ 0.196 ${\theta _{31}}$ 0.256 ${\theta _{43}}$ 0.276 ${\theta _{14}}$ $-$0.158 ${\theta _{32}}$ 0.124 ${\theta _{44}}$ 0.256 ${\theta _{15}}$ 0.367 ${\theta _{33}}$ 0.267 ${\theta _{45}}$ 0.065 ${\theta _{21}}$ 0.146 ${\theta _{34}}$ 0.203 ${\theta _{46}}$ 0.118 ${\theta _{22}}$ 0.145 ${\theta _{35}}$ 0.178
下载: 导出CSV
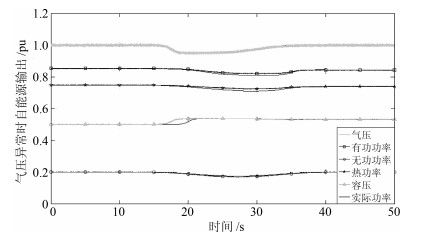
表 5 自能源在气压异常时模型参数辨识结果
Table 5 Parameter identification results of WE model in abnormal gas pressure
参数 估值 参数 估值 参数 估值 ${\theta _{11}}$ 0.045 ${\theta _{23}}$ 0.157 ${\theta _{41}}$ $-$0.095 ${\theta _{12}}$ 0.246 ${\theta _{24}}$ $-$0.576 ${\theta _{42}}$ $-$0.108 ${\theta _{13}}$ 0.069 ${\theta _{31}}$ 0.146 ${\theta _{43}}$ 0.289 ${\theta _{14}}$ $-$0.246 ${\theta _{32}}$ 0.068 ${\theta _{44}}$ 0.227 ${\theta _{15}}$ 0.398 ${\theta _{33}}$ 0.356 ${\theta _{45}}$ 0.074 ${\theta _{21}}$ 0.148 ${\theta _{34}}$ 0.269 ${\theta _{46}}$ 0.145 ${\theta _{22}}$ 0.169 ${\theta _{35}}$ 0.235
下载: 导出CSV
-
[1] 孙秋野, 滕菲, 张化光, 马大中.能源互联网动态协调优化控制体系构建.中国电机工程学报, 2015, 35(14):3667-3677 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=zgdc201514023&dbname=CJFD&dbcode=CJFQSun Qiu-Ye, Teng Fei, Zhang Hua-Guang, Ma Da-Zhong. Construction of dynamic coordinated optimization control system for energy internet. Proceedings of the CSEE, 2015, 35(14):3667-3677 http://kns.cnki.net/KCMS/detail/detail.aspx?filename=zgdc201514023&dbname=CJFD&dbcode=CJFQ [2] 孙秋野, 滕菲, 张化光.能源互联网及其关键控制问题.自动化学报, 2017, 43(2):176-194 http://www.aas.net.cn/CN/abstract/abstract18999.shtmlSun Qiu-Ye, Teng Fei, Zhang Hua-Guang. Energy internet and its key control issues. Acta Automatica Sinica, 2017, 43(2):176-194 http://www.aas.net.cn/CN/abstract/abstract18999.shtml [3] Hu J W, Sun Q Y, Teng F. A game-theoretic pricing model for energy internet in day-ahead trading market considering distributed generations uncertainty. In: Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI). Athens, Greece: IEEE, 2016. 1-7 [4] Son S E, Lee S H, Choi D H, Song K B, Park J D, Kwon Y H, et al. Improvement of composite load modeling based on parameter sensitivity and dependency analyses. IEEE Transactions on Power Systems, 2014, 29(1):242-250 doi: 10.1109/TPWRS.2013.2281455 [5] Kim J K, An K, Ma J, Shin J, Song K B, Park J D, et al. Fast and reliable estimation of composite load model parameters using analytical similarity of parameter sensitivity. IEEE Transactions on Power Systems, 2016, 31(1):663-671 doi: 10.1109/TPWRS.2015.2409116 [6] Duquette J, Rowe A, Wild P. Thermal performance of a steady state physical pipe model for simulating district heating grids with variable flow. Applied Energy, 2016, 178:383-393 doi: 10.1016/j.apenergy.2016.06.092 [7] Behrooz H A, Boozarjomehry R B. Modeling and state estimation for gas transmission networks. Journal of Natural Gas Science and Engineering, 2015, 22:551-570 doi: 10.1016/j.jngse.2015.01.002 [8] Pambour K A, Bolado-Lavin R, Dijkema G P J. An integrated transient model for simulating the operation of natural gas transport systems. Journal of Natural Gas Science and Engineering, 2016, 28:672-690 doi: 10.1016/j.jngse.2015.11.036 [9] Haben S, Singleton C, Grindrod P. Analysis and clustering of residential customers energy behavioral demand using smart meter data. IEEE Transactions on Smart Grid, 2016, 7(1):136-144 doi: 10.1109/TSG.2015.2409786 [10] Fernandes M P, Viegas J L, Vieira S M, Sousa J M. Analysis of residential natural gas consumers using fuzzy c-means clustering. In: Proceedings of the 2016 IEEE International Conference on Fuzzy Systems. Vancouver, Canada: IEEE, 2016. 1484-1491 [11] Sun G, Cong Y, Hou D D, Fan H J, Xu X W, Yu H B. Joint household characteristic prediction via smart meter data. IEEE Transactions on Smart Grid, DOI: 10.1109/TSG.2017.2778428 [12] 孙明轩, 毕宏博.学习辨识:最小二乘算法及其重复一致性.自动化学报, 2012, 38(5):698-706 http://www.aas.net.cn/CN/abstract/abstract13741.shtmlSun Ming-Xuan, Bi Hong-Bo. Learning identiflcation:least squares algorithms and their repetitive consistency. Acta Automatica Sinica, 2012, 38(5):698-706 http://www.aas.net.cn/CN/abstract/abstract13741.shtml [13] 顾成奎, 王正欧.利用基序列逼近的一类非线性时变系统辨识的实用方法.系统工程, 2001, 19(4):22-26 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgc200104005Gu Cheng-Kui, Wang Zheng-Ou. A practical method for identiflcation nonlinear time-varying systems using basis sequences. Systems Engineering, 2001, 19(4):22-26 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgc200104005 [14] 王乐一, 赵文虓.系统辨识:新的模式、挑战及机遇.自动化学报, 2013, 39(7):933-942 http://www.aas.net.cn/CN/abstract/abstract18122.shtmlWang Le-Yi, Zhao Wen-Xiao. System identiflcation:new paradigms, challenges, and opportunities. Acta Automatica Sinica, 2013, 39(7):933-942 http://www.aas.net.cn/CN/abstract/abstract18122.shtml [15] 杨刚, 王乐, 戴丽珍, 杨辉, 陆荣秀.基于AQPSO的RBF神经网络自组织学习.控制与决策, DOI: 10.13195/j.kzyjc.2017.0595Yang Gang, Wang Le, Dai Li-Zhen, Yang Hui, Lu Rong-Xiu. AQPSO-based self-organization learning of RBF neural network. Control and Decision, DOI: 10.13195/j.kzyjc.2017.0595 [16] 钱富才, 黄姣茹, 秦新强.基于鲁棒优化的系统辨识算法研究.自动化学报, 2014, 40(5):988-993 http://www.aas.net.cn/CN/abstract/abstract18368.shtmlQian Fu-Cai, Huang Jiao-Ru, Qin Xin-Qiang. Research on algorithm for system identiflcation based on robust optimization. Acta Automatica Sinica, 2014, 40(5):988-993 http://www.aas.net.cn/CN/abstract/abstract18368.shtml [17] Xu J P, Tan P N, Zhou J Y, Luo L F. Online multi-task learning framework for ensemble forecasting. IEEE Transactions on Knowledge and Data Engineering, 2017, 29(6):1268-1280 doi: 10.1109/TKDE.2017.2662006 [18] Cong Y, Sun G, Liu J, Yu H B, Luo J B. User attribute discovery with missing labels. Pattern Recognition, 2018, 73:33-46 doi: 10.1016/j.patcog.2017.07.012 [19] 汤涌.电力负荷的数学模型与建模技术.北京:科学出版社, 2012. 30-32Tang Yong. Mathematical Model and Modeling Technology of Power Load. Beijing:Science Press, 2012. 30-32 [20] 朱建全, 李颖, 谭伟.基于特性融合的电力负荷建模.电网技术, 2015, 39(5):1358-1364 http://www.cqvip.com/QK/91996X/201505/664676915.htmlZhu Jian-Quan, Li Ying, Tan Wei. Characteristic fusion based on electric load modeling. Power System Technology, 2015, 39(5):1358-1364 http://www.cqvip.com/QK/91996X/201505/664676915.html [21] Goodfellow I, Pouget-Abadie J, Mirza M, Xu B, WardeFarley D, Ozair S, et al. Generative adversarial nets. In: Proceedings of the 2014 Conference on Advances in Neural Information Processing Systems 27. Montreal, Canada: Curran Associates, Inc., 2014. 2672-2680 [22] 王坤峰, 苟超, 段艳杰, 林懿伦, 郑心湖, 王飞跃.生成式对抗网络GAN的研究进展与展望.自动化学报, 2017, 43(3):321-332 http://www.aas.net.cn/CN/abstract/abstract19012.shtmlWang Kun-Feng, Gou Chao, Duan Yan-Jie, Lin Yi-Lun, Zheng Xin-Hu, Wang Fei-Yue. Generative adversarial networks:the state of the art and beyond. Acta Automatica Sinica, 2017, 43(3):321-332 http://www.aas.net.cn/CN/abstract/abstract19012.shtml [23] Zhang H, Xu T, Li H S, Zhang S T, Huang X L, Wang X G, et al. StackGAN: text to photo-realistic image synthesis with stacked generative adversarial networks. arXiv preprint arXiv: 1612.03242, 2016 [24] Santana E, Hotz G. Learning a driving simulator. arXiv preprint arXiv: 1608.01230, 2016 [25] 王飞跃.软件定义的系统与知识自动化:从牛顿到默顿的平行升华.自动化学报, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtmlWang Fei-Yue. Software-deflned systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1):1-8 http://www.aas.net.cn/CN/abstract/abstract18578.shtml [26] Qi G J. Loss-sensitive generative adversarial networks on Lipschitz densities. arXiv preprint arXiv: 1701.06264, 2017 [27] Arjovsky M, Chintala S, Bottou L. Wasserstein GAN. arXiv preprint arXiv: 1701.07875, 2017 [28] Nowozin S, Cseke B, Tomioka R. F-GAN: training generative neural samplers using variational divergence minimization. In: Proceedings of the 2016 Neural Information Processing Systems. Barcelona, Spain: Curran Associates, Inc., 2016. 271-279 [29] Saito Y, Takamichi S, Saruwatari H. Statistical parametric speech synthesis incorporating generative adversarial networks. IEEE/ACM Transactions on Audio, Speech, and Language Processing, 2018, 26(1):84-96 doi: 10.1109/TASLP.2017.2761547 [30] Chen X, Duan Y, Houthooft R, Schulman J, Sutskever I, Abbeel P. InfoGAN: interpretable representation learning by information maximizing generative adversarial nets. In: Proceedings of the 2016 Neural Information Processing Systems. Barcelona, Spain: Curran Associates, Inc., 2016. 2172-2180 [31] Yu L T, Zhang W N, Wang J, Yu Y. SeqGAN: sequence generative adversarial nets with policy gradient. In: Proceedings of the 31st AAAI Conference on Artiflcial Intelligence. San Francisco, California, USA: AAAI, 2017. 2852-2858 [32] Sun Q Y, Zhou J G, Guerrero J M, Zhang H G. Hybrid three-phase/single-phase microgrid architecture with power management capabilities. IEEE Transactions on Power Electronics, 2015, 30(10):5964-5977 doi: 10.1109/TPEL.2014.2379925 [33] Zhao Z, Chen W H, Wu X M, Chen P C Y, Liu J M. LSTM network:a deep learning approach for short-term tra-c forecast. IET Intelligent Transport Systems, 2017, 11(2):68-75 doi: 10.1049/iet-its.2016.0208 [34] Palangi H, Deng L, Shen Y L, Gao J F, He X D, Chen J S, et al. Deep sentence embedding using long short-term memory networks:analysis and application to information retrieval. IEEE/ACM Transactions on Audio, Speech, and Language Processing, 2016, 24(4):694-707 doi: 10.1109/TASLP.2016.2520371 [35] Kim Y. Convolutional neural networks for sentence classiflcation. In: Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing. Doha, Qatar: ACL, 2014. 1746-1751 [36] 孙秋野, 王冰玉, 黄博南, 马大中.狭义能源互联网优化控制框架及实现.中国电机工程学报, 2015, 35(18):4571-4580 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgdjgcxb201518002Sun Qiu-Ye, Wang Bing-Yu, Huang Bo-Nan, Ma Da-Zhong. The optimization control and implementation for the special energy internet. Proceedings of the CSEE, 2015, 35(18):4571-4580 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgdjgcxb201518002 -

 下载:
下载:





计量
- 文章访问数: 3781
- HTML全文浏览量: 697
- PDF下载量: 1229
- 被引次数: 0
