

A Gate-corrected Event-triggered Mechanism and Its Application to the Optic-electric Sensor Network
-
摘要: 本文针对一类通信资源有限的集中式目标状态估计问题进行了研究, 提出一种带波门修正的事件触发机制.当事件触发条件不满足时, 相应探测器按通信系统设计带宽发送完整量测新息至融合中心.当事件触发条件满足时, 相应探测器将量化量测新息发送给融合中心.减少数据传输量, 减轻通信系统的负担.随后推导机制下的融合中心最小均方误差状态估计算法并对其性能进行了理论分析.最后给出一个光电探测网的应用算例, 表明了其在工程应用中的有效性及可行性.
-
关键词:
- 波门修正 /
- 事件触发机制 /
- 最小均方误差估计算法 /
- 光电探测网
Abstract: This article focuses on the problem of the centralized target state estimation with constrained communication resources. This article proposes an novel gate-corrected event-triggered mechanism. When the event-triggered condition is satisfied, the corresponding sensor only sends the quantization of the innovation to the fusion center. It reduces the data transmission amount and eases the burden of the communication system. When the event-triggered condition is not satisfied, the sensor sends the whole innovation to the fusion center. This article also derives the minimum mean square error estimation algorithm with the proposed mechanism. The algorithm's performance is also analyzed in this article. At last, its application to an optic-electric sensor network verifies the efficiency and feasibility of the proposed mechanism.-
Key words:
- Gate-corrected /
- event-triggered mechanism /
- the minimum mean square error state estimation algorithm /
- the optic-electric sensor network
1) 本文责任编委 曹向辉 -
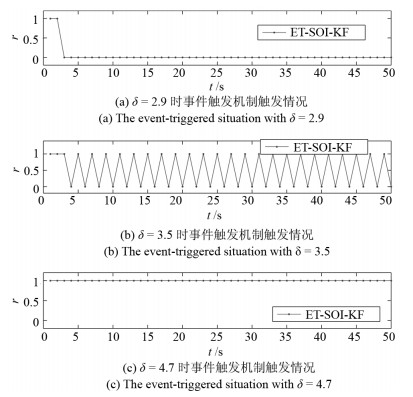
图 4 各门限因子下的事件触发机制触发情况
Fig. 4 The triggering condition of the variance-triggered innovation quantization with different $\delta$

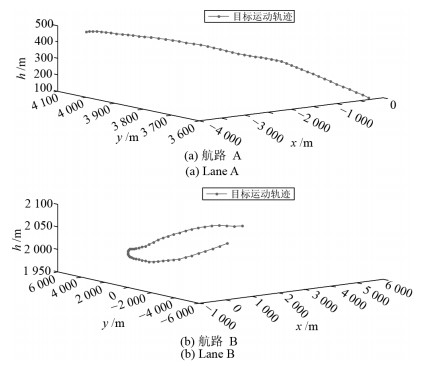
图 8 事件触发新息量化机制下光电探测网目标跟踪示意图
Fig. 8 The diagram of the target tracking of the optic-electric sensor network with the variance-triggered innovation quantization mechanism
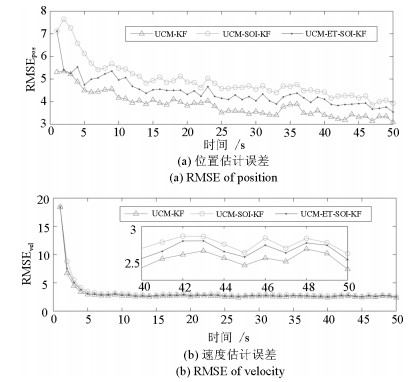
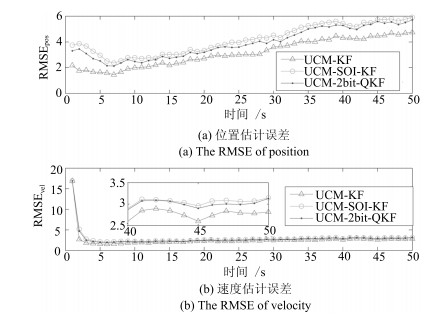
图 9 航路A各通信机制下融合中心对目标位置及速度估计精度
Fig. 9 The $\text{RMSE}_{\text{pos}}, \text{RMSE}_{\text{vel}}$ of the fusion center with three communication mechanisms of lane A
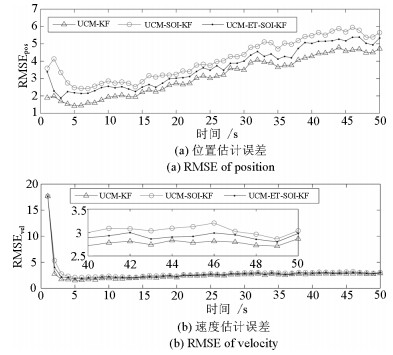
图 10 航路B各通信机制下融合中心对目标位置及速度估计精度
Fig. 10 The $\text{RMSE}_{\text{pos}}, \text{RMSE}_{\text{vel}}$ of the fusion center with three communication mechanisms of lane B
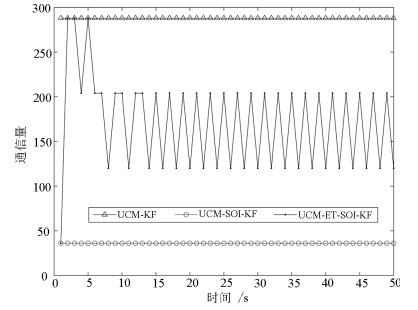
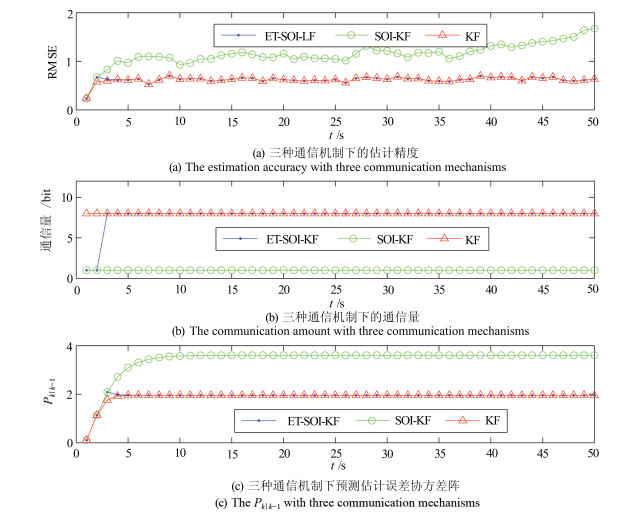
图 11 航路A各通信机制下光电探测网与融合中心间通信量
Fig. 11 The communication cost between the optic-electric sensor network and the fusion center with three communication mechanisms of lane A
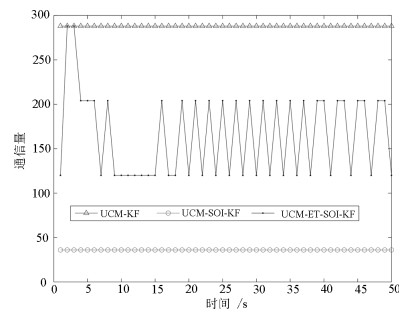
图 12 航路B各通信机制下光电探测网与融合中心间通信量
Fig. 12 The communication cost between the optic-electric sensor network and the fusion center with three communication mechanisms of lane B
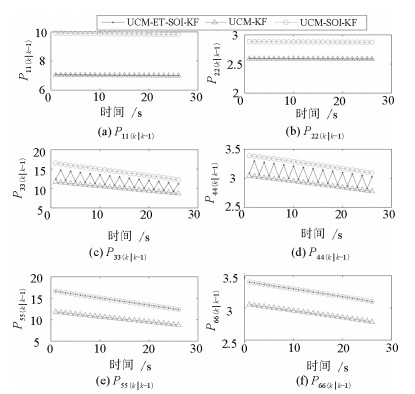
图 13 航路A各通信机制下$P_{k|k-1}$对角元素变化情况
Fig. 13 The variation of diagonal elements with three communication mechanisms of lane A
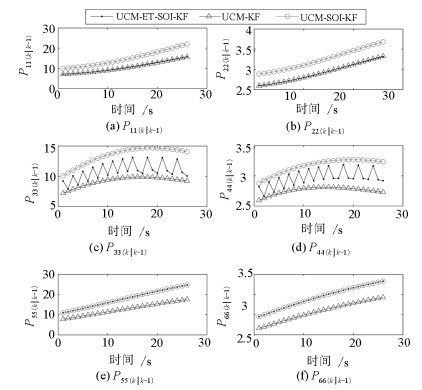
图 14 航路B各通信机制下$P_{k|k-1}$对角元素变化情况
Fig. 14 The variation of diagonal elements of $P_{k|k-1}$ with three communication mechanisms of lane B
表 1 各通信机制性能比较
Table 1 The comparison of each communication mechanism's performance
通信机制 KF SOI-KF ET-SOI-KF $\delta = 2.9$ $\delta = 3.5$ $\delta = 4.7$ 平均通信量 8 1 7.72 4.36 1 精度 0.806 1.288 0.808 0.978 1.288  下载: 导出CSV
下载: 导出CSV
-
[1] 岳元龙, 左信, 罗雄麟.提高测量可靠性的多传感器数据融合有偏估计方法.自动化学报, 2014, 40(9): 1843-1852 doi: 10.3724/SP.J.1004.2014.01843Yue Yuan-Long, Zuo Xin, Luo Xiong-Lin. Improving measurement reliability with biased estimation for multi-sensor data fusion. Acta Automatica Sinica, 2014, 40(9): 1843-1852 doi: 10.3724/SP.J.1004.2014.01843 [2] 薛东国, 陈博, 张文安, 俞立.通信受限下网络化多传感器系统的Kalman融合估计.自动化学报, 2015, 41(1): 203-208 doi: 10.16383/j.aas.2015.c140022Xue Dong-Guo, Chen Bo, Zhang Wen-An, Yu Li. Kalman fusion estimation for networked multi-sensor fusion systems with communication constraints. Acta Automatica Sinica, 2015, 41(1): 203-208 doi: 10.16383/j.aas.2015.c140022 [3] 游康勇, 杨立山, 郭文彬.无线传感器网络下基于压缩感知的多目标分层贪婪匹配定位.自动化学报, 2019, 45(3): 480-489 doi: 10.16383/j.aas.2018.c170237You Kang-Yong, Yang Li-Shan, Guo Wen-Bin. Hierarchical greedy matching pursuit for multi-target localization in wireless sensor networks using compressive sensing. Acta Automatica Sinica, 2019, 45(3): 480-489 doi: 10.16383/j.aas.2018.c170237 [4] Bokareva T, Hu W, Kanhere S, Ristic B, Gordon N, Bessell T, et al. Wireless sensor networks for battlefield surveillance. In: Proceedings of the 2006 Land Warfare Conference. Brisbane, Australia: APDR, 2006. 1-8 [5] Santini S, Ostermaier B, Vitaletti A. First experiences using wireless sensor networks for noise pollution monitoring. In: Proceedings of the 2008 Workshop on Real-World Wireless Sensor Networks. Glasgow, Scotland: ACM, 2008. 61-65 [6] Gungor V C, Hancke G P. Industrial wireless sensor networks: challenges, design principles, and technical approaches. IEEE Transactions on Industrial Electronics, 2009, 56(10): 4258-4265 doi: 10.1109/TIE.2009.2015754 [7] Gungor V C, Lu B, Hancke G P. Opportunities and challenges of wireless sensor networks in smart grid. IEEE Transactions on Industrial Electronics, 2010, 57(10): 3557-3564 doi: 10.1109/TIE.2009.2039455 [8] Feeney L M, Nilsson M. Investigating the energy consumption of a wireless network interface in an ad hoc networking environment. In: Proceeding of the 20th Annual Joint Conference of the IEEE Computer and Communications Societies. Anchorage, Alaska, USA: IEEE, 2001. 1548-1557 [9] Shnayder V, Hempstead M, Chen B, Allen G W, Welsh M. Simulating the power consumption of large-scale sensor network applications. In: Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems. Baltimore, Maryland, USA: ACM, 2004. 188-200 [10] Ribeiro A, Giannakis G B, Roumeliotis S I. SOI-KF: distributed Kalman filtering with low-cost communications using the sign of innovations. IEEE Transactions on Signal Processing, 2006, 54(12): 4782-4795 doi: 10.1109/TSP.2006.882059 [11] Msechu E J, Roumeliotis S I, Ribeiro A, Giannakis G B. Decentralized quantized Kalman filtering with scalable communication cost. IEEE Transactions on Signal Processing, 2008, 56(8): 3727-3741 doi: 10.1109/TSP.2008.925931 [12] You K Y. Recursive algorithms for parameter estimation with adaptive quantizer. Automatica, 2015, 52: 192-201 doi: 10.1016/j.automatica.2014.11.018 [13] Zhang Z, Li J X, Liu L. Distributed state estimation and data fusion in wireless sensor networks using multi-level quantized innovation. Science China Information Sciences, 2016, 59(2): 1-15 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgkx-ef201602017 [14] Doherty K W, Butman C A. A time-or event-triggered automated, serial plankton pump sampler. Advanced Engineering Laboratory Project Summaries. WHOI Technical Report, 1990. [15] 赵国荣, 韩旭, 卢建华.一种基于数据驱动传输策略的带宽受限的分布式融合估计器.自动化学报, 2015, 41(9): 1649-1658 doi: 10.16383/j.aas.2015.c150025Zhao Guo-Rong, Han Xu, Lu Jian-Hua. A decentralized fusion estimator using data-driven communication strategy subject to bandwidth constraints. Acta Automatica Sinica, 2015, 41(9): 1649-1658 doi: 10.16383/j.aas.2015.c150025 [16] Wu J F, Jia Q S, Johansson K H, Shi L. Event-based sensor data scheduling: trade-off between communication rate and estimation quality. IEEE Transactions on Automatic Control, 2013, 58(4): 1041-1046 doi: 10.1109/TAC.2012.2215253 [17] Trimpe S, D'Andrea R. Event-based state estimation with variance-based triggering. IEEE Transactions on Automatic Control, 2014, 59(12): 3266-3281 doi: 10.1109/TAC.2014.2351951 [18] Anderson B D O, Moore J B. Optimal Filtering. Englewood Cliffs, N.J.: Prentice-Hall, 1979. [19] Arasaratnam I, Haykin S. Cubature Kalman filters. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269 doi: 10.1109/TAC.2009.2019800 [20] Shi D W, Chen T W, Shi L. An event-triggered approach to state estimation with multiple point- and set-valued measurements. Automatica, 2014, 50(6): 1641-1648 doi: 10.1016/j.automatica.2014.04.004 [21] Elaydi S. An Introduction to Difference Equations (Third edition). New York: Springer, 2005. [22] 陈黎.不完全量测下光电跟踪系统估计性能研究及其滤波器实现[博士学位论文], 南京理工大学, 中国, 2009Chen Li. Research on estimation performance of optic-electric tracking systems with intermittent observations and filters developments[Ph. D. Dissertation]. Nanjing University of science and technology, China, 2009 [23] 陆君, 吕彤光.光电探测技术在火控系统中的应用及发展.红外与激光工程, 2012, 41(4): 1047-1051 doi: 10.3969/j.issn.1007-2276.2012.04.039Lu Jun, Lv Tong-Guang. Application and development of optoelectronic detection technology in fire control system. Infrared and Laser Engineering, 2012, 41(4): 1047-1051 doi: 10.3969/j.issn.1007-2276.2012.04.039 [24] 赵猛, 左燕, 李明地, 郭宝峰.通信受限下分布式多传感器协同跟踪算法.火力与指挥控制, 2017, 42(6): 6-9 doi: 10.3969/j.issn.1002-0640.2017.06.002Zhao Meng, Zuo Yan, Li Ming-Di, Guo Bao-Feng. Distributed multi-sensor target collaborative tracking algorithm under communication constraints. Fire Control & Command Control, 2017, 42(6): 6-9 doi: 10.3969/j.issn.1002-0640.2017.06.002 [25] 洪嘉翔.通信受限条件下的异步航迹融合实用技术.计算机工程与应用, 2016, 52(2): 250-255 doi: 10.3778/j.issn.1002-8331.1401-0436Hong Jia-Xiang. Practical technology of asynchronous track fusion under condition of limited communication. Computer Engineering and Applications, 2016, 52(2): 250-255 doi: 10.3778/j.issn.1002-8331.1401-0436 [26] Duan Z S, Han C Z, Li X R. Comments on "Unbiased converted measurements for tracking". IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(4): 1374 doi: 10.1109/TAES.2004.1386889 -

 下载:
下载:




计量
- 文章访问数: 1685
- HTML全文浏览量: 223
- PDF下载量: 122
- 被引次数: 0
