

-
摘要: 本文研究了一类存在量测信息缺失情况的目标跟踪问题,提出了一种高斯渐进框架下的目标跟踪方法以实现移动目标的跟踪.考虑可能存在的传感器故障或失效问题,采用假设检验方式以删选错误的量测信息.针对非线性滤波问题,量测信息的缺失将可能引起线性化误差、数值计算误差的增大,从而破坏目标跟踪估计器的稳定性和收敛性.为此,对渐进无迹卡尔曼滤波(Progressive unscented Kalman filter,PUKF)方法进行改进,使其更好地处理量测信息缺失引起的线性化误差、数值计算误差增大的问题.另外,通过对改进PUKF(Modified PUKF,MPUKF)方法的理论分析,证明其可保证渐进过程中的状态估计误差有界.最后,通过一个目标跟踪仿真实例表明,MPUKF方法比传统的IUKF方法和PUKF方法具有更高的跟踪精度.Abstract: This paper is concerned with target tracking problems in the case of incomplete measurements, and a target tracking method presents in the framework of Gaussian progressive filtering. Error measurements are pruned by hypothesis testing under the consideration of possible sensor faults. In nonlinear fitering, stability and convergence of estimator are not guaranteed due to incomplete measurements that may lead to the increase of linearization and numerical calculation errors. Thus, a modified progressive unscented Kalman filter (MPUKF) is proposed to deal with the problem of increase in linearization and numerical calculation errors. Additionally, by theoretical analysis of the MPUKF, it is proved that the estimation errors remain bounded in the progressive process. Simulation of a target tracking example demonstrates that the MPUKF has higher tracking precision than the standard iterated Kalman filter.
-
-
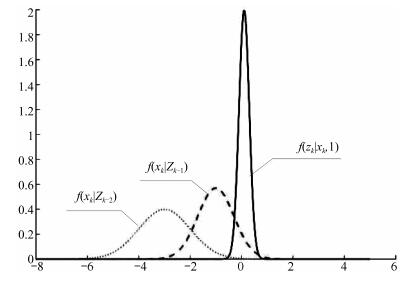
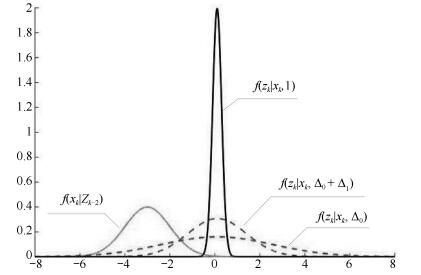
图 4 似然函数与先验概率密度函数示意图
Fig. 4 Diagram of likelihood function and prior probability density function
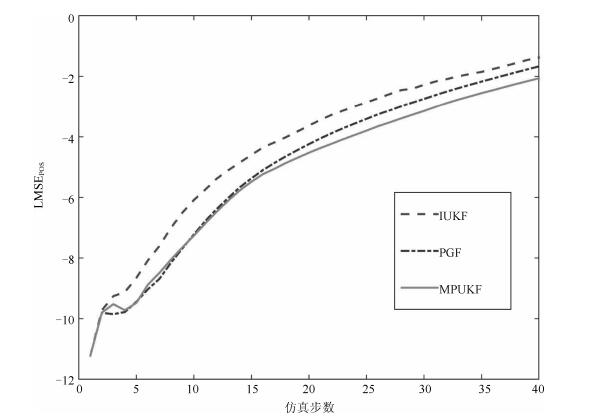
图 6 各滤波器MC仿真${\rm LMSE_{pos}}$的误差分布曲线
Fig. 6 ${\rm LMSE_{pos}}$ distribution from Monte Carlo runs
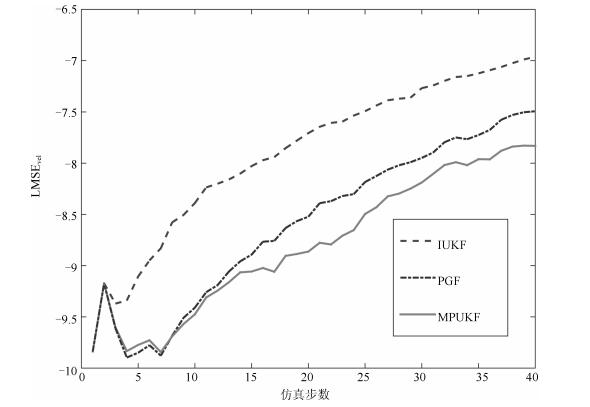
图 7 各滤波器MC仿真${\rm LMSE_{vel}}$的误差分布曲线
Fig. 7 ${\rm LMSE_{vel}}$ distribution from Monte Carlo runs
表 1 各滤波器${\rm LMSE_{pos}}$与${\rm LMSE_{vel}}$的均值
Table 1 Mean of LMSE$ _{\rm{pos}}$ and LMSE$_{\rm {vel}}$
估计方法 LMSE$_{\rm{pos}}$ LMSE$_{\rm{vel}}$ IUKF $\left( {N = 30, \Delta = 1} \right)$ $-$4.372 $-$7.894 PUKF $\left( {N = 30, \Delta = 1{\rm{/}}30} \right)$ $-$4.981 $-$8.592 MPUKF $\left( {N = 30, \Delta = 1{\rm{/}}30} \right)$ $-$5.191 $-$8.787  下载: 导出CSV
下载: 导出CSV
表 2 各滤波器平均执行时间
Table 2 Average running time
估计方法(执行参数) 执行时间/s IUKF $\left( {N = 30, \Delta = 1} \right)$ 0.126 PUKF $\left( {N = 30, \Delta = 1{\rm{/}}30} \right)$ 0.156 MPUKF $\left( {N = 30, \Delta = 1{\rm{/}}30} \right)$ 0.108
下载: 导出CSV
-
[1] 杨旭升, 张文安, 俞立.适用于事件触发的分布式随机目标跟踪方法.自动化学报, 2017, 43(8):1393-1401 http://www.aas.net.cn/CN/abstract/abstract19113.shtmlYang Xu-Sheng, Zhang Wen-An, Yu Li. Distributed tracking method for maneuvering targets with event-triggered mechanism. Acta Automatica Sinica, 2017, 43(8):1393-1401 http://www.aas.net.cn/CN/abstract/abstract19113.shtml [2] Yang X S, Zhang W A, Yu L, Xing K X. Multi-Rate distributed fusion estimation for sensor network-based target tracking. IEEE Sensors Journal, 2016, 16(5):1233-1242 doi: 10.1109/JSEN.2015.2497464 [3] 熊志刚, 黄树彩, 赵炜, 苑智玮, 徐晨洋.均方根嵌入式容积粒子PHD多目标跟踪方法.自动化学报, 2017, 43(2):238-247 http://www.aas.net.cn/CN/abstract/abstract19002.shtmlXiong Zhi-Gang, Huang Shu-Cai, Zhao Wei, Yuan Zhi-Wei, Xu Chen-Yang. Square-root imbedded cubature particle PHD multi-target tracking algorithm. Acta Automatica Sinica, 2017, 43(2):238-247 http://www.aas.net.cn/CN/abstract/abstract19002.shtml [4] Zhang W A, Yang X S, Yu L. Sequential fusion estimation for RSS-based mobile robots localization with event-driven WSNs. IEEE Transactions on Industrial Informatics, 2016, 12(4):1519-1528 doi: 10.1109/TII.2016.2585350 [5] 黄玉龙, 张勇刚, 李宁, 赵琳.一种改进的高斯近似滤波方法.自动化学报, 2016, 42(3):385-401 http://www.aas.net.cn/CN/abstract/abstract18828.shtmlHuang Yu-Long, Zhang Yong-Gang, Li Ning, Zhao Lin. An improved Gaussian approximate filtering method. Acta Automatica Sinica, 2016, 42(3):385-401 http://www.aas.net.cn/CN/abstract/abstract18828.shtml [6] Julier S, Uhlmann J K. A general method for approximating nonlinear transformations of probability distributions. Technical report, Robotics Research Group, Department of Engineering Science, University of Oxford, 1996 [7] Julier S J, Uhlman J K. Unscented filtering and nonlinear estimation. Proceedings of the IEEE, 2004, 92(3):401-422 http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs-e200801002 [8] Zhan R H, Wan J W. Iterated unscented Kalman filter for passive target tracking. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(3):1155-1163 doi: 10.1109/TAES.2007.4383605 [9] Bell B M, Cathey F W. The iterated Kalman filter update as a Gauss-Newton method. IEEE Transactions on Automatic Control, 1993, 38(2):294-297 doi: 10.1109/9.250476 [10] Hanebeck U D, Briechle K, Rauh A. Progressive Bayes: a new framework for nonlinear state estimation. In: Proceedings Volume 5099, Multisensor, Multisource Information Fusion: Architectures, Algorithms, and Applications 2003. Orlando, Florida USA: SPIE, 2003. 256-267 [11] Hanebeck U D, Steinbring J. Progressive Gaussian filtering based on Dirac Mixture approximations. In: Proceedings of the 15th International Conference on Information Fusion. Singapore: IEEE, 2012. 1697-1704 [12] Steinbring J, Hanebeck U D. LRKF revisited:the smart sampling Kalman filter (S2KF). Journal of Advances in Information Fusion, 2014, 9(2):106-123 [13] Chlebek C, Hanebeck U D. Bayesian approach to direct pole estimation. In: Proceedings of the 2014 European Control Conference. Strasbourg, France: IEEE, 2014. 1061-1068 [14] Arasaratnam I, Haykin S. Cubature Kalman filters. IEEE Transactions on Automatic Control, 2009, 54(6):1254-1269 doi: 10.1109/TAC.2009.2019800 [15] Zhang L, Li S, Zhang E Z, Chen Q W. Robust measure of non-linearity-based cubature Kalman filter. IET Science, Measurement & Technology, 2017, 11(7):929-938 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ac386da09116b4daa58363316e178f0f [16] Huang Y L, Zhang Y G, Li N, Zhao L. Gaussian approximate filter with progressive measurement update. In: Proceedings of the 2015 IEEE 54th Annual Conference on Decision and Control. Osaka, Japan: IEEE, 2016. 4344-4349 [17] Boutayeb M, Rafaralahy H, Darouach M. Convergence analysis of the extended Kalman filter used as an observer for nonlinear deterministic discrete-time systems. IEEE Transactions on Automatic Control, 1997, 42(4):581-586 doi: 10.1109/9.566674 [18] Boutayeb M, Aubry D. A strong tracking extended Kalman observer for nonlinear discrete-time systems. IEEE Transactions on Automatic Control, 1999, 44(8):1550-1556 doi: 10.1109/9.780419 [19] Xiong K, Zhang H Y, Chan C W. Performance evaluation of UKF-based nonlinear filtering. Automatica, 2006, 42(2):261-270 doi: 10.1016/j.automatica.2005.10.004 [20] Chang G B. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. Journal of Geodesy, 2014, 88(4):391-401 doi: 10.1007/s00190-013-0690-8 [21] Gibbs R G. New Kalman filter and smoother consistency tests. Automatica, 2013, 49(10):3141-3144 doi: 10.1016/j.automatica.2013.07.013 [22] Huang S D, Dissanayake G. Convergence and consistency analysis for extended Kalman filter Based SLAM. IEEE Transactions on Robotics, 2007, 23(5):1036-1049 doi: 10.1109/TRO.2007.903811 [23] Uhlmann J K. Covariance consistency methods for fault-tolerant distributed data fusion. Information Fusion, 2003, 4(3):201-215 doi: 10.1016/S1566-2535(03)00036-8 [24] Tarn T J, Rasis Y. Observers for nonlinear stochastic systems. IEEE Transactions on Automatic Control, 1976, 21(4):441-448 doi: 10.1109/TAC.1976.1101300 -


计量
- 文章访问数: 2101
- HTML全文浏览量: 222
- PDF下载量: 693
- 被引次数: 0
